[C#]winform部署yolov5-onnx模型
【官方框架地址】
https://github.com/ultralytics/yolov5
【算法介绍】
Yolov5,全称为You Only Look Once version 5,是计算机视觉领域目标检测算法的一个里程碑式模型。该模型由ultralytics团队开发,并因其简洁高效的特点而备受关注。Yolov5在保留了前代模型(Yolov3)优点的同时,进一步优化了网络结构,提高了检测速度和准确率。
Yolov5的核心思想是利用深度学习和神经网络,对输入的图像进行多尺度特征提取,并利用回归方法预测出图像中目标物体的位置和类别信息。相较于传统的目标检测算法,Yolov5具有更高的检测精度和更快的运行速度。
Yolov5模型结构主要包括三个部分:骨干网络(Backbone)、特征金字塔网络(Feature Pyramid Network)和检测头(Detection Head)。
- 骨干网络:Yolov5采用了轻量级的网络结构,如CSPDarknet53和EfficientNet等,用于提取图像的多尺度特征。这些网络结构在保持高性能的同时,显著降低了模型的计算复杂度。
- 特征金字塔网络:特征金字塔网络在骨干网络的基础上,进一步提取多尺度的特征信息,为后续的目标检测提供丰富的特征信息。
- 检测头:检测头负责根据特征金字塔网络输出的特征信息,进行目标物体的位置和类别预测。Yolov5采用了类似于anchor box的方法,通过预测物体与anchor box的交并比(Intersection over Union)和类别信息,实现目标检测。
相较于前代模型,Yolov5在训练过程中采用了许多优化策略,如数据增强、学习率衰减、知识蒸馏等,进一步提高了模型的性能。此外,Yolov5还支持多任务学习(Multi-task Learning),可以在同一模型中同时进行目标检测、实例分割和关键点检测等任务,提高了模型的泛化能力。
在实际应用中,Yolov5表现出了优秀的性能。在COCO、PASCAL VOC等目标检测数据集上,Yolov5取得了领先于其他算法的准确率。此外,由于Yolov5的简洁高效特点,该模型在移动设备、嵌入式系统等领域也有着广泛的应用前景。
总的来说,Yolov5是计算机视觉领域目标检测算法的一个重要进展。它不仅提高了目标检测的准确率和速度,而且具有较低的计算复杂度和良好的泛化能力。未来,随着深度学习技术的不断发展,相信会有更多优秀的目标检测算法涌现出来,推动计算机视觉领域的技术进步。
【效果展示】

【参考实现部分代码】
using SixLabors.Fonts;
using SixLabors.ImageSharp;
using SixLabors.ImageSharp.Drawing.Processing;
using SixLabors.ImageSharp.PixelFormats;
using SixLabors.ImageSharp.Processing;
using System;
using Yolov5Net.Scorer;
using Yolov5Net.Scorer.Models;using var image = await Image.LoadAsync<Rgba32>("Assets/test.jpg");
{using var scorer = new YoloScorer<YoloCocoP5Model>("Assets/Weights/yolov5n.onnx");{var predictions = scorer.Predict(image);var font = new Font(new FontCollection().Add("C:/Windows/Fonts/consola.ttf"), 16);foreach (var prediction in predictions) // draw predictions{var score = Math.Round(prediction.Score, 2);var (x, y) = (prediction.Rectangle.Left - 3, prediction.Rectangle.Top - 23);image.Mutate(a => a.DrawPolygon(new Pen(prediction.Label.Color, 1),new PointF(prediction.Rectangle.Left, prediction.Rectangle.Top),new PointF(prediction.Rectangle.Right, prediction.Rectangle.Top),new PointF(prediction.Rectangle.Right, prediction.Rectangle.Bottom),new PointF(prediction.Rectangle.Left, prediction.Rectangle.Bottom)));image.Mutate(a => a.DrawText($"{prediction.Label.Name} ({score})",font, prediction.Label.Color, new PointF(x, y)));}await image.SaveAsync("Assets/result.jpg");}
}
【源码下载】
【测试环境】
vs2019
netframework4.7.2
onnxruntime1.16.3
opencvsharp4.8.0
注意模型在yolov5-6.0和yolov5-7.0测试通过,<6.0不支持
相关文章:
[C#]winform部署yolov5-onnx模型
【官方框架地址】 https://github.com/ultralytics/yolov5 【算法介绍】 Yolov5,全称为You Only Look Once version 5,是计算机视觉领域目标检测算法的一个里程碑式模型。该模型由ultralytics团队开发,并因其简洁高效的特点而备受关注。Yol…...

基于SpringBoot的洗衣店管理系统
基于SpringBoot的洗衣店管理系统的设计与实现~ 开发语言:Java数据库:MySQL技术:SpringBootMyBatis工具:IDEA/Ecilpse、Navicat、Maven 系统展示 登录界面 可视化展示 用户界面 管理员界面 摘要 洗衣店管理系统基于Spring Boot框…...

AMEYA360:广和通RedCap模组FG131FG132系列
2024年1月,广和通RedCap模组FG131&FG132系列已进入工程送样阶段,可为终端客户提供样片。广和通RedCap模组系列满足不同终端对5G速率、功耗、尺寸、成本的需求,全面助力RedCap技术的行业应用。 FG131&FG132系列基于骁龙X35 5G调制解调…...

RGB,RGB-D,单目,双目,sterro相机,实例相机介绍
相机—特点及区别 1.相机种类 RGB,RGB-D,单目,双目,sterro相机,实例相机 2.相机特点 2.1单目 只使用一个摄像头进行SLAM,结构简单,成本低 三维空间的二维投影 必须移动相机,才…...

【linux】history命令显示时间的例子
在Linux中,你可以通过设置HISTTIMEFORMAT环境变量来显示命令的执行时间。这个环境变量定义了history命令中时间的显示格式。以下是设置和说明的步骤: 打开终端: 打开你的终端应用。 编辑配置文件: 使用文本编辑器(如n…...
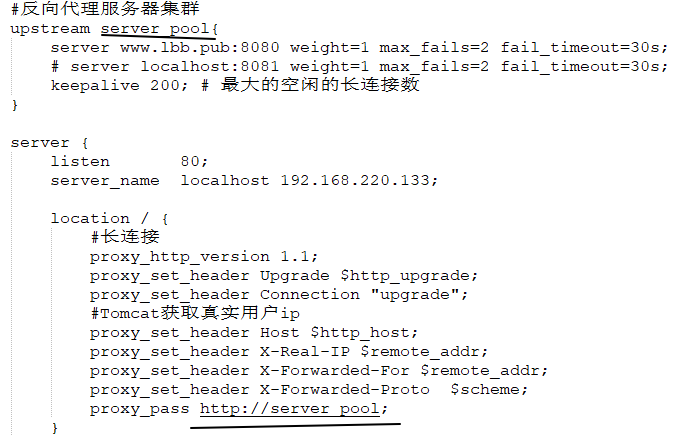
Nginx负载均衡以及常用的7层协议和4层协议的介绍
一、引言 明人不说暗话,下面来解析一下 Nginx 的负载均衡。需要有 Linux 和 Nginx 环境哈。 二、nginx负载均衡的作用 高并发:负载均衡通过算法调整负载,尽力均匀的分配应用集群中各节点的工作量,以此提高应用集群的并发处理能力…...

【机器学习300问】4、机器学习到底在学习什么?
首先我们先了解一个前置问题,再回答机器学习到底在学习什么。 一、求机器学习问题有哪几步? 求解机器学习问题的步骤可以分为“学习”和“推理”两个阶段。首先,在学习阶段进行模型的学习,然后,在推理阶段用学到的模型…...

设计一个简易版的数据库路由
👏作者简介:大家好,我是爱吃芝士的土豆倪,24届校招生Java选手,很高兴认识大家📕系列专栏:Spring原理、JUC原理、Kafka原理、分布式技术原理、数据库技术🔥如果感觉博主的文章还不错的…...

接口自动化测试面试题
前言 前面总结了一篇关于接口测试的常规面试题,现在接口自动化测试用的比较多,也是被很多公司看好。那么想做接口自动化测试需要具备哪些能力呢? 也就是面试的过程中,面试官会考哪些问题,知道你是不是真的做过接口自动…...

Tampermonkey油猴插件-各大网盘批量分享,解放双手-上
Unity3D特效百例案例项目实战源码Android-Unity实战问题汇总游戏脚本-辅助自动化Android控件全解手册再战Android系列...
【DB2】installSAM执行后会重启这件事
碎碎念 在使用自动化工具安装TSAMP的过程中,机器会自动重启这件事。 TSAMP真的挺折磨的,一个月居然因为这件事情debug两次了。 在测试自动化脚本的时候,第一遍安装都是好好的,从第二遍开始(因为要测试脚本的幂等性&…...
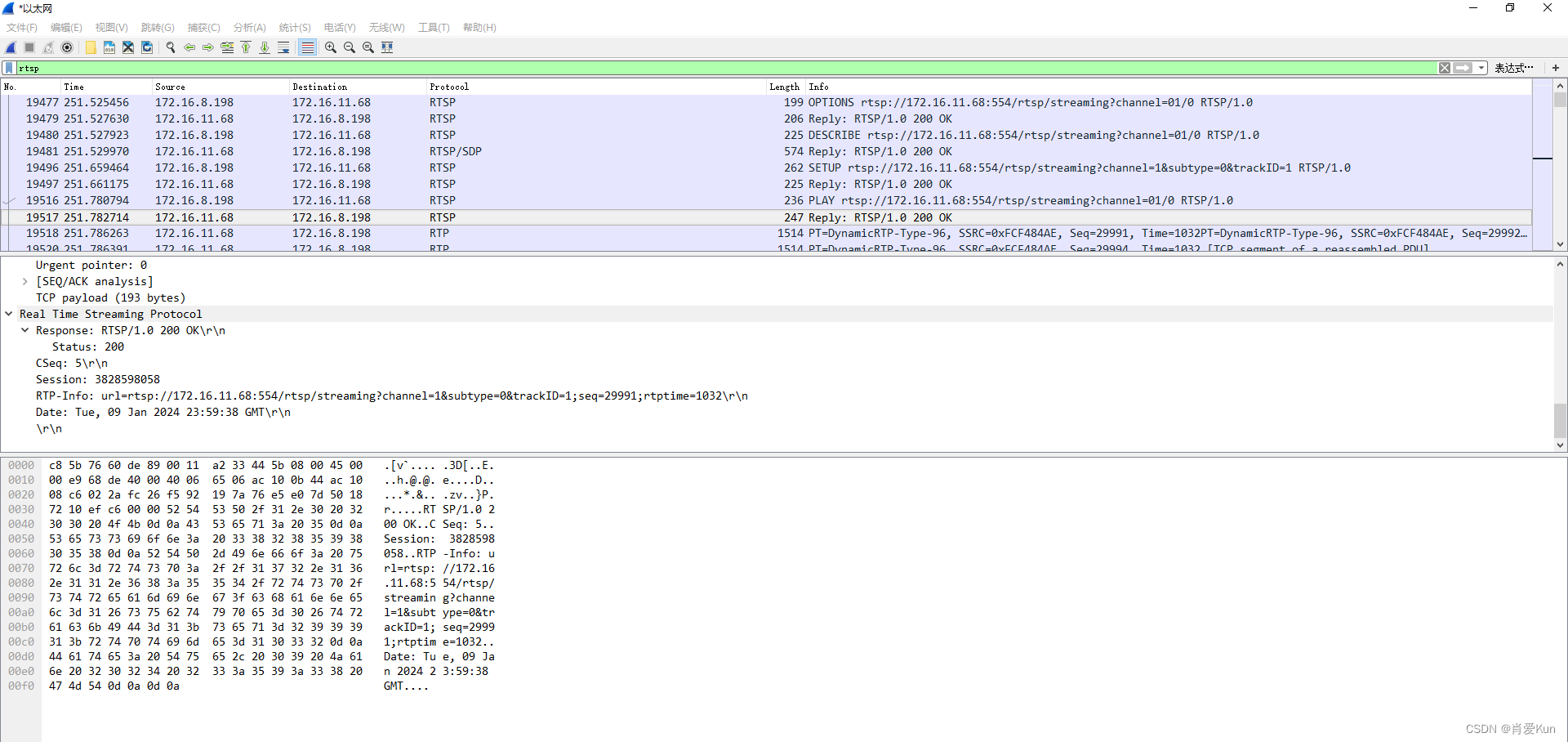
RTSP网络视频协议
一.RTSP网络视频协议介绍 RTSP是类似HTTP的应用层协议,一个典型的流媒体框架网络体系可参考下图,其中rtsp主要用于控制命令,rtcp主要用于视频质量的反馈,rtp用于视频、音频流从传输。 1、RTSP(Real Time Streaming P…...

Python 网络数据采集(四):Selenium 自动化
Python 网络数据采集(四):Selenium 自动化 前言一、背景知识Selenium 4Selenium WebDriver 二、Selenium WebDriver 的安装与配置2.1 下载 Chrome 浏览器的驱动程序2.2 配置环境变量三、Python 安装 Selenium四、页面元素定位4.1 选择浏览器开…...
实现秒杀功能设计
页面 登录页面 登录成功后,跳转商品列表 商品列表页 加载商品信息 商品详情页 根据商品id查出商品信息返回VO(包括rmiaoshaStatus、emainSeconds)前端根据数据展示秒杀按钮,点击开始秒杀 订单详情页 秒杀页面设置 后端返回秒杀…...
每天刷两道题——第十四天
1.1矩阵置零 给定一个 m x n 的矩阵,如果一个元素为 0 ,则将其所在行和列的所有元素都设为 0 。请使用原地算法。 输入:matrix [[0,1,2,0],[3,4,5,2],[1,3,1,5]] 输出:[[0,0,0,0],[0,4,5,0],[0,3,1,0]] 原地算法(…...

快速掌握Postman实现接口测试
快速掌握Postman实现接口测试 Postman简介 Postman是谷歌开发的一款网页调试和接口测试工具,能够发送任何类型的http请求,支持GET/PUT/POST/DELETE等方法。Postman非常简单易用,可以直接填写URL,header,body等就可以发…...
jmeter--3.使用提取器进行接口关联
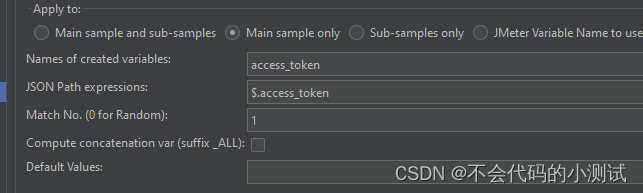
目录 1. 正则表达式提取器 1.1 提取单个数据 1.2 名词解释 1.3 提取多个数据 2. 边界值提取器 2.2 名词解释 3. JSON提取器 3.1 Json语法 3.2 名词解释 3.3 如果有多组数据,同正则方式引用数据 1. 正则表达式提取器 示例数据:{"access_to…...
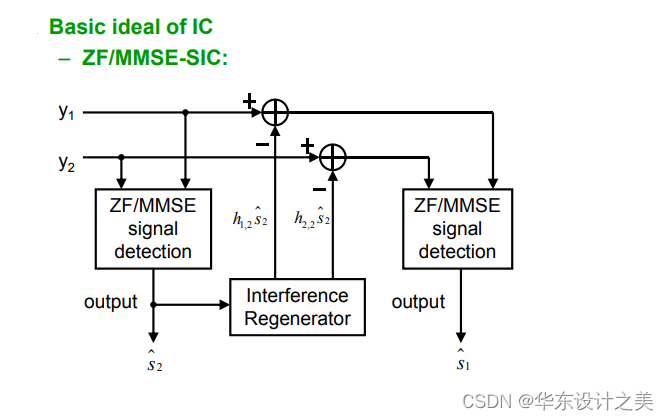
移动通信系统关键技术多址接入MIMO学习(8)
1.Multiple-antenna Techniques多天线技术MIMO,从SISO到SIMO到MISO到如今的MIMO; 2.SIMO单发多收,分为选择合并、增益合并;SIMO,基站通过两路路径将信号发送到终端,因为终端接收到的两路信号都是来自同一天…...
WorkPlus AI助理为企业提供智能客服的机器人解决方案
在数字化时代,企业面临着客户服务的重要挑战。AI客服机器人成为了提升客户体验和提高工作效率的关键工具。作为一款优秀的AI助理,WorkPlus AI助理以其智能化的特点和卓越的功能,为企业提供了全新的客服机器人解决方案。 为什么选择WorkPlus A…...

python类装饰器编写单体类
1 python类装饰器编写单体类 类装饰器用于装饰类,用于管理类自身,或用于管理实例创建调用。 单体类,不管创建多少次实例,都只有一个实例的类。可以通过类装饰器管理装饰类的全部实例,实现单体类。 1.1 字典存放单体…...
)
别再乱接纽扣电池了!STM32 VBAT引脚的正确外围电路设计(附5种常见错误分析)
STM32 VBAT电路设计避坑指南:从原理到实践的5个关键错误解析 在STM32硬件设计中,VBAT引脚的处理看似简单,却暗藏玄机。许多工程师在第一次接触这个为RTC和备份寄存器供电的引脚时,往往会陷入"接个电池就能用"的误区。事…...

单片机IO口驱动能力解析与LED驱动设计
1. 单片机IO口驱动能力基础概念刚接触单片机开发时,很多同学对IO口的驱动能力概念感到困惑。实际上,驱动能力直接决定了单片机引脚能带动多大的负载。以常见的51单片机为例,其IO口在输出低电平时的灌电流能力通常为10-20mA,而输出…...

从赛道到产线:智能车竞赛如何为《美国工厂》精神谱写青春代码
1. 智能车竞赛:制造业的青春实验室 当《美国工厂》纪录片中那些机械臂精准运作的画面还在脑海中挥之不去时,我站在全国大学生智能车竞赛的现场,突然意识到这两者之间存在着某种奇妙的联系。智能车竞赛就像是一个微缩版的制造业实验室…...

Wave-U-Net:革新音频分离技术的端到端深度学习解决方案
Wave-U-Net:革新音频分离技术的端到端深度学习解决方案 【免费下载链接】Wave-U-Net Implementation of the Wave-U-Net for audio source separation 项目地址: https://gitcode.com/gh_mirrors/wa/Wave-U-Net 在数字音频处理领域,从混合音频中精…...

Python 算法详解:从原理到实践
Python 算法详解:从原理到实践 1. 背景与动机 算法是计算机科学的核心,它是解决问题的步骤和方法。Python 作为一种功能强大的编程语言,提供了丰富的工具和库来实现各种算法。掌握 Python 算法不仅可以提高程序的效率,还可以培养解…...

树莓派无头模式终极指南:不接显示器,用SSH+VNC搞定所有开发调试
树莓派无头模式终极指南:不接显示器,用SSHVNC搞定所有开发调试 当你把树莓派塞进机器人底盘、挂在墙上作为智能家居中枢,或是藏在机柜里充当服务器时,最不想看到的就是拖着一堆显示器和线材。作为嵌入式开发老手,我经历…...

cv_resnet50_face-reconstruction多场景落地解析:医疗影像预处理与教育人脸建模
cv_resnet50_face-reconstruction多场景落地解析:医疗影像预处理与教育人脸建模 1. 项目简介:一个开箱即用的人脸重建工具 如果你正在寻找一个能快速上手、无需复杂配置的人脸重建工具,那么cv_resnet50_face-reconstruction项目值得你关注。…...

Python F1数据分析终极指南:5个高级技巧掌握赛车性能可视化
Python F1数据分析终极指南:5个高级技巧掌握赛车性能可视化 【免费下载链接】Fast-F1 FastF1 is a python package for accessing and analyzing Formula 1 results, schedules, timing data and telemetry 项目地址: https://gitcode.com/GitHub_Trending/fa/Fas…...

Wan2.2-I2V-A14B绿色AI实践:显存优化降低35%功耗的碳足迹测算
Wan2.2-I2V-A14B绿色AI实践:显存优化降低35%功耗的碳足迹测算 1. 引言:绿色AI的迫切需求 在AI技术快速发展的今天,大模型训练和推理带来的能源消耗问题日益突出。Wan2.2-I2V-A14B作为一款先进的文生视频模型,通过显存优化技术实…...

如何通过Windows Cleaner实现C盘空间释放:提升系统性能的完整指南
如何通过Windows Cleaner实现C盘空间释放:提升系统性能的完整指南 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是否经常遇到C盘爆红的困扰&#…...