【CCNet】《CCNet:Criss-Cross Attention for Semantic Segmentation》

ICCV-2019
文章目录
- 1 Background and Motivation
- 2 Related Work
- 3 Advantages / Contributions
- 4 Method
- 5 Experiments
- 5.1 Datasets and Metrics
- 5.2 Experiments on Cityscapess
- 5.3 Experiments on ADE20K
- 5.4 Experiments on COCO
- 6 Conclusion(own)
1 Background and Motivation
分割任务中全局的上下文信息非常重要,如果高效轻量的获取上下文?
Thus, is there an alternative solution to achieve such a target in a more efficient way?
作者提出了 Criss-Cross Attention
相比于 Non-local(【NL】《Non-local Neural Networks》)
复杂度从 O((HxW)x(HxW)) 降低到了 O((HxW)x(H+W-1))
2 Related Work
- semantic segmentation
- contextual information aggregation
- Attention model
3 Advantages / Contributions
- 提出 Criss-Cross 注意力,capture contextual information from full-image dependencies in a more efficient and effective way
- 在语义分割数据集 Cityscapes, ADE20K 和实例分割数据 COCO 上均有提升
4 Method
整理流程如下

Criss-Cross Attention Module 用了两次,叫 recurrent Criss-Cross attention (RCCA) module
下面是和 non-local 的对比

比如(b)中,计算蓝色块的 attention,绿色块不同深浅表示与蓝色块的相关程度,第一次结合十字架attention得到黄色块,第二次再结合十字架attention,得到红色块
为什么两次,因为一次捕获不到全局上下文信息,两次就可以,如下图

第一次,计算深绿色块的 Criss-Cross 注意力,只能获取到浅绿色块的信息,蓝色块的信息获取不到,浅绿色可以获取到蓝色块信息
第二次,计算深绿色块的 Criss-Cross 注意力,因为第一次计算浅绿色块注意力时已经有蓝色块信息了,此时,可以获取到蓝色块信息
更细节的 Criss-Cross 注意力图如下

下面结合图 3 看看公式表达
输入 H ∈ R C × W × H H \in \mathbb{R}^{C \times W \times H} H∈RC×W×H
query 和 key, { Q , K } ∈ R C ′ × W × H \{Q, K\} \in \mathbb{R}^{{C}' \times W \times H} {Q,K}∈RC′×W×H, C ′ {C}' C′ 为 1/8 C C C
Q u ∈ R C ′ Q_u \in \mathbb{R}^{{C}'} Qu∈RC′, u u u 是 H × W H \times W H×W 中空间位置索引,特征图 Q 的子集(每个空间位置)
Ω u ∈ R ( H + W − 1 ) × C ′ \Omega_{u} \in \mathbb{R}^{(H + W -1) \times {C}' } Ωu∈R(H+W−1)×C′,特征图 K 的子集(每个十字架)
Affinity operation 可以定义为
d i , u = Q u Ω i , u T d_{i,u} = Q_u \Omega_{i, u}^T di,u=QuΩi,uT
Q Q Q上每个空间位置 Q u Q_u Qu,找到 K K K 上对应的同行同列十字架 Ω u \Omega_{u} Ωu, i i i 是十字架中空间位置的索引, d i , u ∈ D d_{i,u} \in {D} di,u∈D, D ∈ R ( H + W − 1 ) × W × H D \in \mathbb{R}^{(H+W-1) \times W \times H} D∈R(H+W−1)×W×H, Q Q Q 和 K K K 计算的 D D D 经过 softmax 后成 A ∈ R ( H + W − 1 ) × W × H A \in \mathbb{R}^{(H + W -1) \times W \times H} A∈R(H+W−1)×W×H
Q Q Q 和 K K K 计算出来了权重 A A A 最终作用到 K K K 上,形式如下:
H u ′ = ∑ i ∈ ∣ Φ u ∣ A i , u Φ i , u + H u {H}_u^{'} = \sum_{i \in | \Phi_u|} A_{i,u}\Phi_{i,u} + H_u Hu′=i∈∣Φu∣∑Ai,uΦi,u+Hu
Φ i , u \Phi_{i,u} Φi,u 同 Ω i , u \Omega_{i, u} Ωi,u,一个是特征图 V V V 的子集,一个是特征图 K K K 的子集, H H H 是输入, H ′ {H}^{'} H′ 为输出, i i i 是十字架索引, u u u 是 H H H x W W W 空间位置索引
为了使每一个位置 u u u 可以与任何位置对应起来,作者通过两次计算 Criss-cross 来完成,只需对 H ′ {H}^{'} H′ 再次计算 criss-cross attention,输出 H ′ ′ {H}^{''} H′′,此时就有:
u u u and θ \theta θ in the same row or column

A A A 表示 loop = 1 时的注意力 weight, A ′ {A}' A′ 表示 loop = 2 时的 weight
u u u and θ \theta θ not in the same row or column,eg 图 4,深绿色位置是 u u u,蓝色的位置是 θ \theta θ


加上

再看看代码
import torch
import torch.nn as nn
import torch.nn.functional as Fdef INF(B,H,W):return -torch.diag(torch.tensor(float("inf")).cuda().repeat(H),0).unsqueeze(0).repeat(B*W,1,1)class CrissCrossAttention(nn.Module):def __init__(self, in_channels):super(CrissCrossAttention, self).__init__()self.in_channels = in_channelsself.channels = in_channels // 8self.ConvQuery = nn.Conv2d(self.in_channels, self.channels, kernel_size=1)self.ConvKey = nn.Conv2d(self.in_channels, self.channels, kernel_size=1)self.ConvValue = nn.Conv2d(self.in_channels, self.in_channels, kernel_size=1)self.SoftMax = nn.Softmax(dim=3)self.INF = INFself.gamma = nn.Parameter(torch.zeros(1))def forward(self, x):b, _, h, w = x.size()# [b, c', h, w]query = self.ConvQuery(x)# [b, w, c', h] -> [b*w, c', h] -> [b*w, h, c']query_H = query.permute(0, 3, 1, 2).contiguous().view(b*w, -1, h).permute(0, 2, 1)# [b, h, c', w] -> [b*h, c', w] -> [b*h, w, c']query_W = query.permute(0, 2, 1, 3).contiguous().view(b*h, -1, w).permute(0, 2, 1)# [b, c', h, w]key = self.ConvKey(x)# [b, w, c', h] -> [b*w, c', h]key_H = key.permute(0, 3, 1, 2).contiguous().view(b*w, -1, h)# [b, h, c', w] -> [b*h, c', w]key_W = key.permute(0, 2, 1, 3).contiguous().view(b*h, -1, w)# [b, c, h, w]value = self.ConvValue(x)# [b, w, c, h] -> [b*w, c, h]value_H = value.permute(0, 3, 1, 2).contiguous().view(b*w, -1, h)# [b, h, c, w] -> [b*h, c, w]value_W = value.permute(0, 2, 1, 3).contiguous().view(b*h, -1, w)# [b*w, h, c']* [b*w, c', h] -> [b*w, h, h] -> [b, h, w, h]energy_H = (torch.bmm(query_H, key_H) + self.INF(b, h, w)).view(b, w, h, h).permute(0, 2, 1, 3)# [b*h, w, c']*[b*h, c', w] -> [b*h, w, w] -> [b, h, w, w]energy_W = torch.bmm(query_W, key_W).view(b, h, w, w)# [b, h, w, h+w] concate channels in axis=3 concate = self.SoftMax(torch.cat([energy_H, energy_W], 3))# [b, h, w, h] -> [b, w, h, h] -> [b*w, h, h]attention_H = concate[:,:,:, 0:h].permute(0, 2, 1, 3).contiguous().view(b*w, h, h)attention_W = concate[:,:,:, h:h+w].contiguous().view(b*h, w, w)# [b*w, h, c]*[b*w, h, h] -> [b, w, c, h]out_H = torch.bmm(value_H, attention_H.permute(0, 2, 1)).view(b, w, -1, h).permute(0, 2, 3, 1)out_W = torch.bmm(value_W, attention_W.permute(0, 2, 1)).view(b, h, -1, w).permute(0, 2, 1, 3)return self.gamma*(out_H + out_W) + xif __name__ == "__main__":model = CrissCrossAttention(512)x = torch.randn(2, 512, 28, 28)model.cuda()out = model(x.cuda())print(out.shape)
Q,K,A,V 还是比较直接
参考
-
CCNet–于"阡陌交通"处超越恺明Non-local
-
语义分割系列20-CCNet(pytorch实现)
5 Experiments
5.1 Datasets and Metrics
- Cityscapes
- ADE20K
- COCO
Mean IoU (mIOU, mean of class-wise intersection over union section over union) for Cityscapes and ADE20K and the standard COCO metrics Average Precision (AP) for COCO
5.2 Experiments on Cityscapess
(1)Comparisons with state-of-the-arts

DPC 用了更强的主干,更多的数据集来 train

(2)Ablation studies

消融了下循环的次数,还是很猛的,第一次就提升了 2.9 个点,第二次又提升了 1.8 个
看看效果图,重点看作者圈出来的白色虚线椭圆区域

对比看看其他的 context aggregation 模块

作者的 Criss-Cross Attention 比较猛
其次比较猛的是 Non-local,但是作者的计算量小很多

看看特征图,重点看作者圈出来的绿色十字加号区域

5.3 Experiments on ADE20K

5.4 Experiments on COCO

6 Conclusion(own)
《Large Kernel Matters Improve Semantic Segmentation by Global Convolutional Network》



相关文章:
【CCNet】《CCNet:Criss-Cross Attention for Semantic Segmentation》
ICCV-2019 文章目录 1 Background and Motivation2 Related Work3 Advantages / Contributions4 Method5 Experiments5.1 Datasets and Metrics5.2 Experiments on Cityscapess5.3 Experiments on ADE20K5.4 Experiments on COCO 6 Conclusion(own) 1 Ba…...
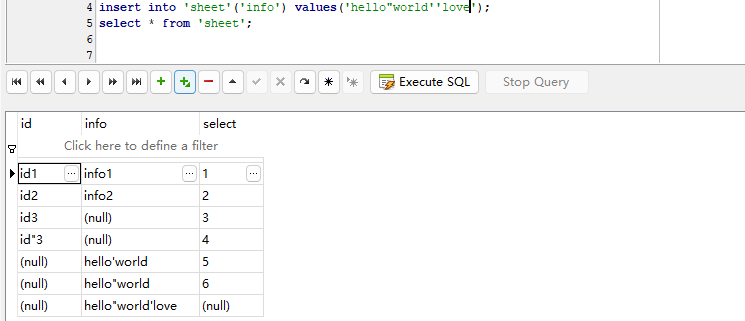
Qt QSQlite数据库插入字符串中存在单个双引号或单个单引号解决方案
1. 前言 当进行数据库写入或更新时,有时会遇到存在字符串中包含单个双引号或者单引号。 2. 单引号和双引号""作用 在数据库中,字符串常量时需要用一对英文单引号或英文双引号""将字符串常量括起来。 比如: select * …...
Linux系统中的IP地址、主机名、和域名解析
1.IP地址 每一台联网的电脑都会有一个地址,用于和其它计算机进行通讯 IP地址主要有2个版本,V4版本和V6版本(V6很少用,暂不涉及) IPv4版本的地址格式是:a.b.c.d,其中abcd表示0~255的数字&…...

soc算法【周末总结】
1 实验一(SOC误差30%放电实验) 1.1 实验过程 1、对电池包进行充电,将昨天放空的电池包进行充电,充电至SOC40%左右; 2、电池包SOC为38%时,手动修改SOC值为70%,开始放电 3、SOC由70%缓慢降至4…...
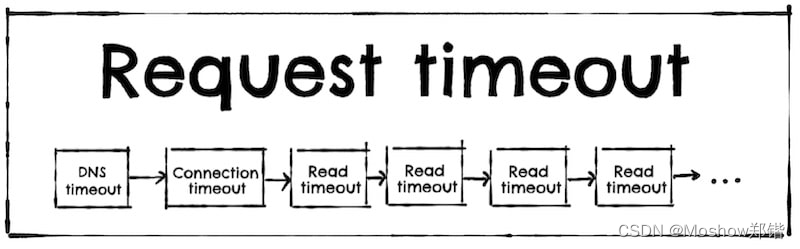
SpringBoot之优化高并发场景下的HttpClient并提升QPS
HttpClient优化思路 使用连接池(简单粗暴) 长连接优化(特殊业务场景) httpclient和httpget复用 合理的配置参数(最大并发请求数,各种超时时间,重试次数) 异步请求优化࿰…...

go-zero 如何在任意地方获取yaml中的值
1、config配置文件中新增全局变量 package configimport "github.com/zeromicro/go-zero/rest"type Config struct {rest.RestConfDB struct {DataSource string}Redis struct {Addr stringPassWord stringUserName string}Auth struct {AccessSecret stringAcc…...

C++20结构化绑定应用实例(二百五十六)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 人生格言: 人生…...
改进YOLOv8注意力系列四:结合中心化特征金字塔EVCBlock、大核卷积注意力LKA_Attention、全局注意力MobileViTAttention
改进YOLOv8注意力系列三:结合CrissCrossAttention、ECAAttention、EMAU期望最大化注意力 代码大核卷积注意力LKA_Attention中心化特征金字塔EVCBlock全局注意力MobileViTAttention加入方法各种yaml加入结构本文提供了改进 YOLOv8注意力系列包含不同的注意力机制以及多种加入方…...
idea中使用Lombok 失效,@Slf4j 找不到符号的解决办法
文章目录 一、前言二、问题排查和解决方案三、 其他解决方案3.1 另一种解决方案3.2 参考文章 一、前言 今天在一个多module工程中,新增了一个 springboot(版本 2.2.4.RELEASE) module,像往常一样,我引入了lombok依赖&…...

MySQL修炼手册8:约束与完整性:保证数据的一致性
目录 写在开头1 主键与唯一键约束1.1 PRIMARY KEY约束的作用1.2 主键的复合使用1.3 主键的修改与删除1.4 UNIQUE约束的应用场景1.5 主键与唯一键约束的性能影响1.6 主键的自动增长1.7 主键的最佳实践1.8 独特性与业务需求1.9 避免过度使用唯一约束1.10 主键与唯一键的关系 2 外…...
)
React入门 - 03(初识 React 组件和 JSX)
本章内容 目录 1.初识 React 组件2.关于 JSX 继上一节的工程案例,我们这一节主要了解一下 React组件和 “JSX 语法”。 前置知识点:ES6模块化&继承 1.初识 React 组件 1、打开 src/index.js文件(项目的入口文件)内容&…...
华为OD机试 - 反射计数(Java JS Python C)
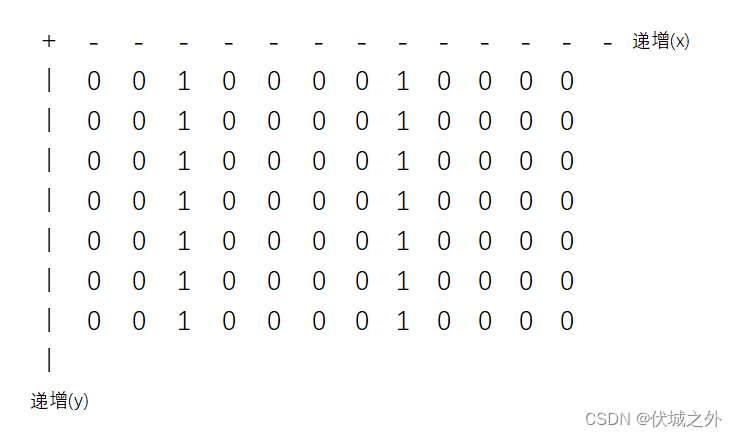
题目描述 给定一个包含 0 和 1 的二维矩阵。 给定一个初始位置和速度,一个物体从给定的初始位置出发,在给定的速度下进行移动,遇到矩阵的边缘则发生镜面发射。 无论物体经过 0 还是 1,都不影响其速度。 请计算并给出经过 t 时间单位后,物体经过 1 点的次数。 矩阵以左…...

Linux系统中使用systemctl命令控制软件的启动和关闭
Linux系统很多软件(内置或第三方)均支持使用systemctl命令控制:启动、停止、开机自启 能够被systemctl管理的软件,一般也称之为:服务 1.功能和语法 功能:控制系统服务的启动关闭等 语法:syst…...
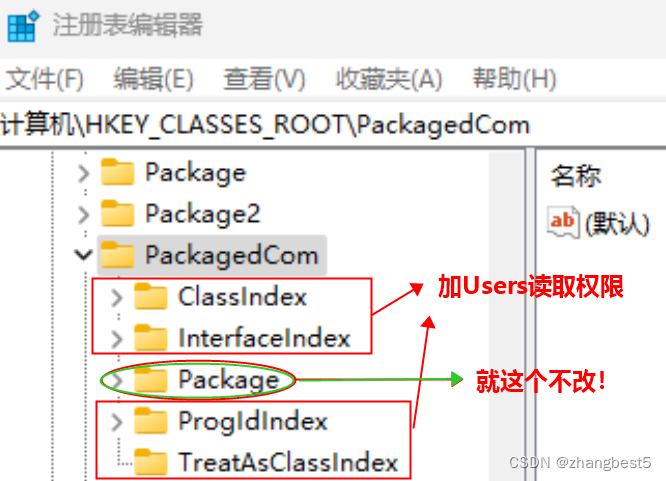
2024年01月微软更新Bug 已解决 !Explorer.EXE 提示:Windows无法访问指定设备、路径或文件。你可能没有适当的权限访问该项目。
前倾概要 近期大量出现如上图问题,杀毒,系统急救箱都没反应,罪魁祸首就是微软更新! 点击什么都是:Windows无法访问指定设备、路径或文件。你可能没有适当的权限访问该项目。 但软件使用正常,还能通过建立…...
Qt/QML编程学习之心得:slider(34)
滑条slider,有时也成为进度条progressbar,在GUI界面中也是经常用到的。 import QtQuick 2.9 import QtQuick.Controls 2.0 import QtQuick.Layouts 1.2ApplicationWindow {id:rootvisible: truewidth: 1920height: 720//title: qsTr("Hello World&q…...
使用metricbeat 监控多ES集群
背景 ES 本身自带 监控,属于xpack 中的内容,为商业版,需要收费; 并且 monitor 功能必须要在security开启后才能使用,还有就是集群监控自己,将采集到的性能数据保存到本集群,这是一个比较差的设…...
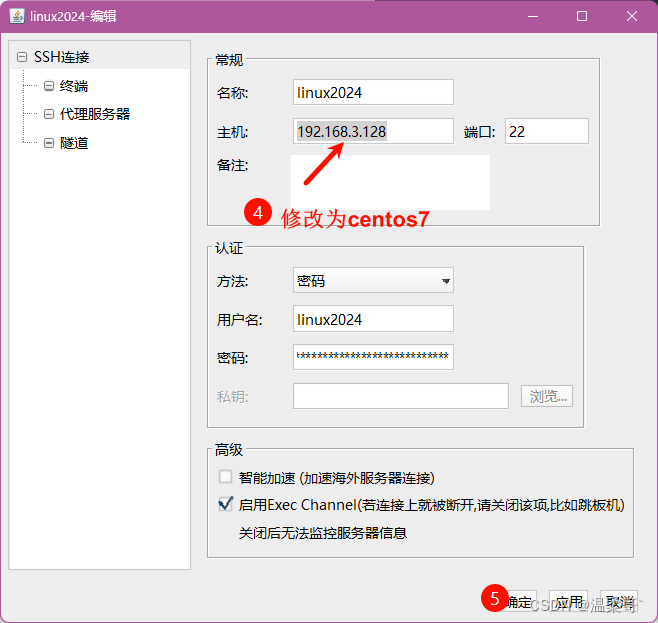
阿里云服务器+宝塔 (尝试部署一个最简单的静态页面)
1. 免费白嫖一个阿里服务器 进入网址:服务器购买地址 选择预装宝塔面板 购买完成后前往控制台 查看当前实例 设置或修改密码 设置用户名和密码 2. 远程连接到服务器 2.1. 使用Workbench连接 输入用户名和密码连接成功页面如下: 2.2. 使…...

每日一题——LeetCode1160.拼写单词
方法一 个人方法: 先统计chars里每个字符出现的次数,再对words里每个字符串统计每个字符出现的字符,当: 1、字符串里出现chars里没有的字符 2、字符串里某个字符出现的次数大于该字符在chars里出现的次数 以上两种情况则不符合…...
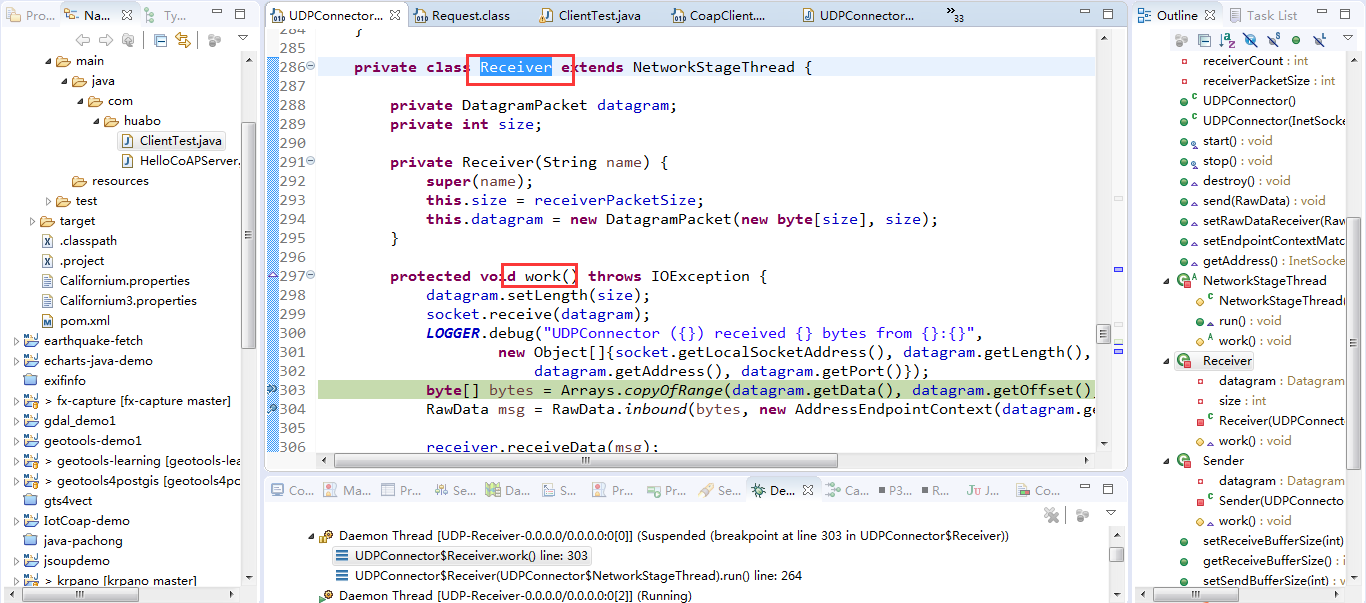
物联网协议Coap之Core和NetWork简介
目录 前言 一、Coap的Core包 1、Coap对象 2、Message对象 3、Request对象 4、Response对象 二、Coap的NetWork调试 1、UDP运行模式 2、Network消息接收 3、Sender线程发送数据 三、总结 前言 在之前的博文中,对Californium中Coap的实现进行了简要的介绍&a…...
Java SE入门及基础(10)
switch选择结构 1. 概念 switch 表示开关的意思,为了帮助理解,下面以线路为例,进行解释说明 上图中表示一条带有多个开关的线路,当开关打开时,该开关所控制的灯即被点亮。 2. 语法规则 switch ( 表达式 ){ //…...

图像超分新思路:拆解SCNet的‘空间移位’操作,看它如何用零参数实现3x3卷积的效果
图像超分辨率革命:零参数空间移位如何颠覆传统卷积设计 当你在手机相册里翻出一张十年前的老照片,是否曾幻想过能一键修复那些模糊的像素?这正是图像超分辨率技术试图解决的难题。传统方法依赖计算密集的33卷积,而SCNet提出的&quo…...

深入解析:高级 Android 开发工程师职位与面试全攻略
引言:移动互联网时代的核心力量 在当今移动互联网蓬勃发展的时代,智能手机已成为人们日常生活中不可或缺的一部分。作为连接用户与数字服务的桥梁,移动应用扮演着至关重要的角色。而在移动应用的生态中,Android 系统凭借其开放性和庞大的用户基础,占据了全球移动操作系统…...

AI赋能React开发:让快马智能助手帮你设计和优化复杂组件逻辑
AI赋能React开发:让快马智能助手帮你设计和优化复杂组件逻辑 最近在开发一个电商网站时,遇到了一个常见的需求:实现一个侧边栏商品筛选组件。这个组件需要包含价格区间滑块、多品牌复选框和分类下拉选择三个主要功能。刚开始觉得这个需求挺简…...

OpenClaw多用户方案:QwQ-32B共享环境下的权限隔离
OpenClaw多用户方案:QwQ-32B共享环境下的权限隔离 1. 为什么需要多用户方案? 去年我在家里搭建了一个OpenClaw自动化环境,原本只是个人使用。直到某天家人看到我用语音指令让AI自动整理照片、生成周报后,纷纷要求"共享&quo…...

基于spring和vue的企业原材料库存盘点食品厂管理系统
目录技术选型与架构设计核心功能模块划分数据库设计要点关键技术实现前端交互优化系统安全措施测试与部署方案扩展性设计项目技术支持源码获取详细视频演示 :文章底部获取博主联系方式!同行可合作技术选型与架构设计 后端采用Spring Boot框架࿰…...
)
从SolidWorks到Gazebo:手把手教你用SW2URDF插件为ROS2 Humble机械臂建模(含ROS2适配避坑指南)
从SolidWorks到Gazebo:ROS2 Humble机械臂建模全流程实战 1. 工业设计与机器人仿真的桥梁搭建 当机械工程师第一次接触机器人仿真时,往往会面临一个关键挑战:如何将精心设计的SolidWorks模型转化为可在Gazebo中运行的仿真模型?这个…...

4步构建高效视频处理流水线:VideoFusion全功能指南
4步构建高效视频处理流水线:VideoFusion全功能指南 【免费下载链接】VideoFusion 一站式短视频拼接软件 无依赖,点击即用,自动去黑边,自动帧同步,自动调整分辨率,批量变更视频为横屏/竖屏 项目地址: https://gitcode.com/gh_mirrors/vi/VideoFusion 功能特性…...

Wan2.2-I2V-A14B极限测试:高分辨率与长视频生成的稳定性挑战
Wan2.2-I2V-A14B极限测试:高分辨率与长视频生成的稳定性挑战 1. 开场白:当AI视频生成遇上极限挑战 最近在测试Wan2.2-I2V-A14B模型时,我突发奇想:这个在常规场景下表现优秀的视频生成模型,如果被推到极限会怎样&…...

如何通过离线语音输入提升Android设备的文字录入效率
如何通过离线语音输入提升Android设备的文字录入效率 【免费下载链接】Sayboard An open-source on-device voice IME (keyboard) for Android using the Vosk library. 项目地址: https://gitcode.com/gh_mirrors/sa/Sayboard 在智能手机普及的今天,文字输…...

AI神器10秒搞定网申,求职效率翻倍
投简历填表单填到崩溃?这个AI神器帮你10秒搞定网申,海投效率直接拉满! 秋招春招跑过招聘季的朋友,一定都懂这种窒息感: 好不容易筛好了目标公司,点开招聘官网,迎面而来就是几十项的简历表单。姓名、电话、邮箱、教育经历从高中填到大学、实习经历要写清每段的起止时间…...