chromium通信系统-ipcz系统(十一)-mojo binding
关于mojo binding的官方文档为mojo docs。 由于比较复杂,这里只做简单源码分析。
我们知道要实现rpc,必须实现客户端和服务端。 mojo 实现了一套领域语言,通过领域语言描述接口和数据, 再通过特有编译器编译成c++代码。 这个过程会生成Mojo对象, 我们以content/common/child_process.mojom 为例子来分析。
interface ChildProcess {......// Requests that the process bind a receiving pipe targeting the service// interface named by |receiver|.//// TODO(crbug.com/977637): Rename this to |RunService()| once the above method// is removed.BindServiceInterface(mojo_base.mojom.GenericPendingReceiver receiver);// Requests that the process bind a receiving pipe targeting the interface// named by |receiver|. Unlike |BindServiceInterface()| this may be used to// bind arbitrary interfaces on many different types of child processes.// Calls to this method generally end up in// |ChildThreadImpl::OnBindReceiver()|.//// Whether or not the interface type encapsulated by |receiver| is supported// depends on the process type and potentially on the Content embedder.BindReceiver(mojo_base.mojom.GenericPendingReceiver receiver);......
};
我们删除一些接口,总体定义如下。生成带c++代码如下。
out/Default/gen/content/common/child_process.mojom.h
class CONTENT_EXPORT ChildProcess: public ChildProcessInterfaceBase {public:......// 接口的名字static const char Name_[];// 方法表,用于将消息序号转化为处理函数static IPCStableHashFunction MessageToMethodInfo_(mojo::Message& message);// 方法名称表static const char* MessageToMethodName_(mojo::Message& message);// 协议版本static constexpr uint32_t Version_ = 0;static constexpr bool PassesAssociatedKinds_ = false;// 是否包含不可中断的方法static constexpr bool HasUninterruptableMethods_ = false;using Base_ = ChildProcessInterfaceBase;// 代理对象,用于客户端调用using Proxy_ = ChildProcessProxy;template <typename ImplRefTraits>// 用于指向服务端实现using Stub_ = ChildProcessStub<ImplRefTraits>;// 请求校验器using RequestValidator_ = ChildProcessRequestValidator;// 回复校验器using ResponseValidator_ = mojo::PassThroughFilter;// 方法版本列表enum MethodMinVersions : uint32_t {kProcessShutdownMinVersion = 0,kSetIPCLoggingEnabledMinVersion = 0,kGetBackgroundTracingAgentProviderMinVersion = 0,kEnableSystemTracingServiceMinVersion = 0,kCrashHungProcessMinVersion = 0,kRunServiceDeprecatedMinVersion = 0,kBindServiceInterfaceMinVersion = 0,kBindReceiverMinVersion = 0,kSetPseudonymizationSaltMinVersion = 0,};......// 下面是方法声明virtual ~ChildProcess() = default;......virtual void BindServiceInterface(::mojo::GenericPendingReceiver receiver) = 0;virtual void BindReceiver(::mojo::GenericPendingReceiver receiver) = 0;......
};生成的c++ 类除了方法声明之外,还包括如下信息:
- Name_接口名称
- MessageToMethodInfo_: 方法表,通过收到的消息找到对应的rpc方法。
- Proxy_ 代理对象,通过代理对象调用具体方法组装消息,发送给服务端。(包括方法名称,参数等,用于调用服务端对应方法)
- Stub_ 用于描述服务端,指向服务端具体实现。
- RequestValidator_ 请求校验。
- ResponseValidator_ 响应校验。
通过官方文档我们知道通过Remote 调用服务端方法。 来看一下Remote 是如何实现的。
mojo/public/cpp/bindings/remote.h
887 void ChildProcessProxy::BindServiceInterface(888 ::mojo::GenericPendingReceiver in_receiver) {889 #if BUILDFLAG(MOJO_TRACE_ENABLED)890 TRACE_EVENT1(891 "mojom", "Send content::mojom::ChildProcess::BindServiceInterface", "input_parameters",892 [&](perfetto::TracedValue context){893 auto dict = std::move(context).WriteDictionary();894 perfetto::WriteIntoTracedValueWithFallback(895 dict.AddItem("receiver"), in_receiver,896 "<value of type ::mojo::GenericPendingReceiver>");897 });898 #endif899 const bool kExpectsResponse = false;900 const bool kIsSync = false;901 const bool kAllowInterrupt = true;902 903 const uint32_t kFlags =904 ((kExpectsResponse) ? mojo::Message::kFlagExpectsResponse : 0) |905 ((kIsSync) ? mojo::Message::kFlagIsSync : 0) |906 ((kAllowInterrupt) ? 0 : mojo::Message::kFlagNoInterrupt);907 908 mojo::Message message(909 internal::kChildProcess_BindServiceInterface_Name, kFlags, 0, 0, nullptr);910 mojo::internal::MessageFragment<911 ::content::mojom::internal::ChildProcess_BindServiceInterface_Params_Data> params(912 message);913 params.Allocate();914 mojo::internal::MessageFragment<915 typename decltype(params->receiver)::BaseType> receiver_fragment(916 params.message());917 mojo::internal::Serialize<::mojo_base::mojom::GenericPendingReceiverDataView>(918 in_receiver, receiver_fragment);919 params->receiver.Set(920 receiver_fragment.is_null() ? nullptr : receiver_fragment.data());921 MOJO_INTERNAL_DLOG_SERIALIZATION_WARNING(922 params->receiver.is_null(),923 mojo::internal::VALIDATION_ERROR_UNEXPECTED_NULL_POINTER,924 "null receiver in ChildProcess.BindServiceInterface request");925 926 #if defined(ENABLE_IPC_FUZZER)927 message.set_interface_name(ChildProcess::Name_);928 message.set_method_name("BindServiceInterface");929 #endif930 // This return value may be ignored as false implies the Connector has931 // encountered an error, which will be visible through other means.932 ::mojo::internal::SendMojoMessage(*receiver_, message);933 }
BindServiceInterface 的主要作用就是组装消息,然后发送。 这里908-909行创建Message的时候指定的消息名称为internal::kChildProcess_BindServiceInterface_Name, 用于指示服务端调用哪个方法。 这里932行receiver_ 持有一个portal,可以将数据写出去。
我们再看服务端怎么处理消息:
259 // Implements the mojom ChildProcess interface and lives on the IO thread.
260 class ChildThreadImpl::IOThreadState
261 : public base::RefCountedThreadSafe<IOThreadState>,
262 public mojom::ChildProcess {......
358
359 void BindServiceInterface(mojo::GenericPendingReceiver receiver) override {
360 if (service_binder_)
361 service_binder_.Run(&receiver);
362
363 if (receiver) {
364 main_thread_task_runner_->PostTask(
365 FROM_HERE, base::BindOnce(&ChildThreadImpl::BindServiceInterface,
366 weak_main_thread_, std::move(receiver)));
367 }
368 }
369
370 void BindReceiver(mojo::GenericPendingReceiver receiver) override {
371 if (wait_for_interface_binders_) {
372 pending_binding_requests_.push_back(std::move(receiver));
373 return;
374 }
375
376 if (interface_binders_.TryBind(&receiver))
377 return;
378
379 main_thread_task_runner_->PostTask(
380 FROM_HERE, base::BindOnce(&ChildThreadImpl::OnBindReceiver,
381 weak_main_thread_, std::move(receiver)));
382 }
383 ......457 mojo::Receiver<mojom::ChildProcess> receiver_{this};
458
459 // Binding requests which should be handled by |interface_binders|, but which
460 // have been queued because |allow_interface_binders_| is still |false|.
461 std::vector<mojo::GenericPendingReceiver> pending_binding_requests_;
462 };ChildThreadImpl::IOThreadState 实现了mojom::ChildProcess接口。 它持有了一个receiver_对象, 该对象持有portal一端, 用于处理对端发送的消息。
我们具体来看 mojo::Receivermojom::ChildProcess 的实现。
template <typename Interface,typename ImplRefTraits = RawPtrImplRefTraits<Interface>>
class Receiver {
......explicit Receiver(ImplPointerType impl) : internal_state_(std::move(impl)) {}
......private:internal::BindingState<Interface, ImplRefTraits> internal_state_;
}
Receiver 的参数为ChildThreadImpl::IOThreadState实例。 然后初始化internal_state_变量。internal_state_类型展开宏之后为nternal::BindingState<mojom::ChildProcess, RawPtrImplRefTraitsmojom::ChildProcess> internal_state_。
template <typename Interface, typename ImplRefTraits>
class BindingState : public BindingStateBase {public:using ImplPointerType = typename ImplRefTraits::PointerType;explicit BindingState(ImplPointerType impl) {stub_.set_sink(std::move(impl));}......
}
这里stub_成员变量为 typename Interface::template Stub_ stub_;展开宏为
mojom::ChildProcess::Stub_ stub_, 也就是ChildProcessStub。 我们看一下它的实现以及set_sink 方法。
out/Default/gen/content/common/child_process.mojom.h
template <typename ImplRefTraits =mojo::RawPtrImplRefTraits<ChildProcess>>
class ChildProcessStub: public mojo::MessageReceiverWithResponderStatus {public:
........void set_sink(ImplPointerType sink) { sink_ = std::move(sink); }ImplPointerType& sink() { return sink_; }bool Accept(mojo::Message* message) override {if (ImplRefTraits::IsNull(sink_))return false;return ChildProcessStubDispatch::Accept(ImplRefTraits::GetRawPointer(&sink_), message);}bool AcceptWithResponder(mojo::Message* message,std::unique_ptr<mojo::MessageReceiverWithStatus> responder) override {if (ImplRefTraits::IsNull(sink_))return false;return ChildProcessStubDispatch::AcceptWithResponder(ImplRefTraits::GetRawPointer(&sink_), message, std::move(responder));}private:ImplPointerType sink_;
};
set_sink方法实际设置成员变量sink_, 实际指向ChildThreadImpl::IOThreadState实例。 当receiver收到消息后会调用Accept(异步)方法或者AcceptWithResponder(同步返回结果)方法。
Accept方法调用ChildProcessStubDispatch::Accept方法,第一个参数为sink_, 第二个参数为消息体。我们来看ChildProcessStubDispatch::Accept 方法
out/Default/gen/content/common/child_process.mojom.cc
1021 // static
1022 bool ChildProcessStubDispatch::Accept(
1023 ChildProcess* impl,
1024 mojo::Message* message) {
1025 switch (message->header()->name) {.......
1182 case internal::kChildProcess_BindServiceInterface_Name: {
1183
1184 DCHECK(message->is_serialized());
1185 internal::ChildProcess_BindServiceInterface_Params_Data* params =
1186 reinterpret_cast<internal::ChildProcess_BindServiceInterface_Params_Data*>(
1187 message->mutable_payload());
1188
1189 bool success = true;
1190 ::mojo::GenericPendingReceiver p_receiver{};
1191 ChildProcess_BindServiceInterface_ParamsDataView input_data_view(params, message);
1192
1193 if (success && !input_data_view.ReadReceiver(&p_receiver))
1194 success = false;
1195 if (!success) {
1196 ReportValidationErrorForMessage(
1197 message,
1198 mojo::internal::VALIDATION_ERROR_DESERIALIZATION_FAILED,
1199 ChildProcess::Name_, 6, false);
1200 return false;
1201 }
1202 // A null |impl| means no implementation was bound.
1203 DCHECK(impl);
1204 impl->BindServiceInterface(
1205 std::move(p_receiver));
1206 return true;
1207 }
1208 case internal::kChildProcess_BindReceiver_Name: {
1209
1210 DCHECK(message->is_serialized());
1211 internal::ChildProcess_BindReceiver_Params_Data* params =
1212 reinterpret_cast<internal::ChildProcess_BindReceiver_Params_Data*>(
1213 message->mutable_payload());
1214
1215 bool success = true;
1216 ::mojo::GenericPendingReceiver p_receiver{};
1217 ChildProcess_BindReceiver_ParamsDataView input_data_view(params, message);
1218
1219 if (success && !input_data_view.ReadReceiver(&p_receiver))
1220 success = false;
1221 if (!success) {
1222 ReportValidationErrorForMessage(
1223 message,
1224 mojo::internal::VALIDATION_ERROR_DESERIALIZATION_FAILED,
1225 ChildProcess::Name_, 7, false);
1226 return false;
1227 }
1228 // A null |impl| means no implementation was bound.
1229 DCHECK(impl);
1230 impl->BindReceiver(
1231 std::move(p_receiver));
1232 return true;
1233 }.......
1259 }
1260 }
1261 return false;
1262 }函数很简单,根据message的名称反序列化参数,然后调用ChildThreadImpl::IOThreadState的对应方法。
以上就是典型的ipcz binding 使用。 整体通信借助ipcz 通道。
相关文章:
-mojo binding)
chromium通信系统-ipcz系统(十一)-mojo binding
关于mojo binding的官方文档为mojo docs。 由于比较复杂,这里只做简单源码分析。 我们知道要实现rpc,必须实现客户端和服务端。 mojo 实现了一套领域语言,通过领域语言描述接口和数据, 再通过特有编译器编译成c代码。 这个过程会…...
鸿蒙开发基础-Web组件之cookie操作
使用ArkTS语言实现一个简单的免登录过程,向大家介绍基本的cookie管理操作。主要包含以下功能: 获取指定url对应的cookie的值。设置cookie。清除所有cookie。免登录访问账户中心。 cookie读写操作 首次打开应用时,应用首页的Web组件内呈现的…...

什么是k8s和声明式编程?
认识k8s之后,他的操作模式对我来说是一种很不错的体验。他提供了更接近现实世界的面向对象接口。 什么是k8s? Kubernetes(K8s)是一种开源容器编排平台,用于自动化部署、扩展和管理容器化应用程序。它简化了容器化应用…...
Fluids —— MicroSolvers DOP
目录 Gas SubStep —— 重复执行对应的子步 Switch Solver —— 切换解算器 Gas Attribute Swap —— 交换、复制或移动几何体属性 Gas Intermittent Solve —— 固定时间间隔计算子解算器 Gas External Forces —— 计算外部力并更新速度或速度场 Gas Particle Separate…...

工业智能网关:HiWoo Box远程采集设备数据
工业智能网关:HiWoo Box远程采集设备数据 在工业4.0和智能制造的浪潮下,工业互联网已成为推动产业升级、提升生产效率的关键。而在这其中,工业智能网关扮演着至关重要的角色。今天,我们就来深入探讨一下工业智能网关。 一、什么…...

Apollo之原理和使用讲解
文章目录 1 Apollo1.1 简介1.1.1 背景1.1.2 简介1.1.3 特点 1.2 基础模型1.3 Apollo 四个维度1.3.1 application1.3.2 environment1.3.3 cluster1.3.4 namespace 1.4 本地缓存1.5 客户端设计1.5.1 客服端拉取原理1.5.2 配置更新推送实现 1.6 总体设计1.7 可用性考虑 2 操作使用…...

魅族MX4pro系统升级、降级
网上的教程都是按住开机键音量上或者下键,但是我按了没用,还是直接点击压缩包管用。 下载系统 官网地址(所有手机固件):https://flyme.cn/firmware.html 官方魅族mx4Pro系统:https://flyme.cn/firmwarelis…...

【Docker】快速入门之Docker的安装及使用
一、引言 1、什么是Docker Docker是一个开源的应用容器引擎,它让开发者可以将他们的应用及其依赖打包到一个可移植的镜像中,然后发布到任何流行的Linux或Windows操作系统的机器上,也可以实现虚拟化。容器是完全使用沙箱机制,相互之…...

记录汇川:H5U于Factory IO测试13
主程序: 子程序: IO映射 子程序: 辅助出料 子程序: 模式选择 子程序: 示教程序 子程序: 手动程序 子程序: 统计程序 子程序: 异常报警 子程序: 自动程序: F…...
PYTHON通过跳板机巡检CENTOS的简单实现
实现的细节和引用的文件和以前博客记录的基本一致 https://shaka.blog.csdn.net/article/details/106927633 差别在于,这次是通过跳板机登陆获取的主机信息,只记录差异的部份 1.需要在跳板机相应的路径放置PYTHON的脚本resc.py resc.py这个脚本中有引用的文件(pm.sh,diskpn…...

网络配置以及命令详解
传统linux中,网络接口为eth0,eth1,eth2,..... RHEL 7以上版本默认命名是基于分配上的固定名称,ens33 接口类型: en:以太网有线接口 wl:无线局域网接口 ww:无线广域网 dmesg:显示开机信息 适配器类型: s:热插拔插槽 o:板载 p:pci类型 ifconfig ens160(命令行配置,临时生效):查…...

商务外语MR混合现实仿真情景实训教学
MR混合现实技术是一种将虚拟世界与真实世界相结合的技术。通过MR设备,我们可以将虚拟的场景、人物、物品等元素实时地呈现在真实的环境中,实现真实与虚拟的完美融合。在商务外语的实训教学中,MR技术可以为我们提供丰富的场景资源,…...

牛客周赛 Round 28 解题报告 | 珂学家 | 组合数学 + 离散化树状数组
前言 整体评价 还是E稍微有点意思,新周赛好像比预期要简单一些, _. 欢迎关注 珂朵莉 牛客周赛专栏 珂朵莉 牛客小白月赛专栏 A. 小红的新周赛 思路: 模拟 #include <bits/stdc.h>using namespace std;int main() {int res 0;for (int i 0; i < 6; i…...
—— 变量)
Python系列(3)—— 变量
变量 一、变量命名规范二、变量赋值三、变量的数据类型四、变量的作用域五、变量类型转换 Python编程中,变量是存储数据的容器。它们用于存储各种数据类型,如整数、浮点数、字符串、列表、字典等。理解变量及其工作原理是Python编程的基础。 一、变量命…...

Java 并发性和多线程2
四、如何创建并运行 java 线程 Java 线程类也是一个 object 类,它的实例都继承自 java.lang.Thread 或其子类。 可以用如下方式用 java 中创建一个线程: Tread thread new Thread(); 执行该线程可以调用该线程的 start()方法: thread.start(); 在上…...
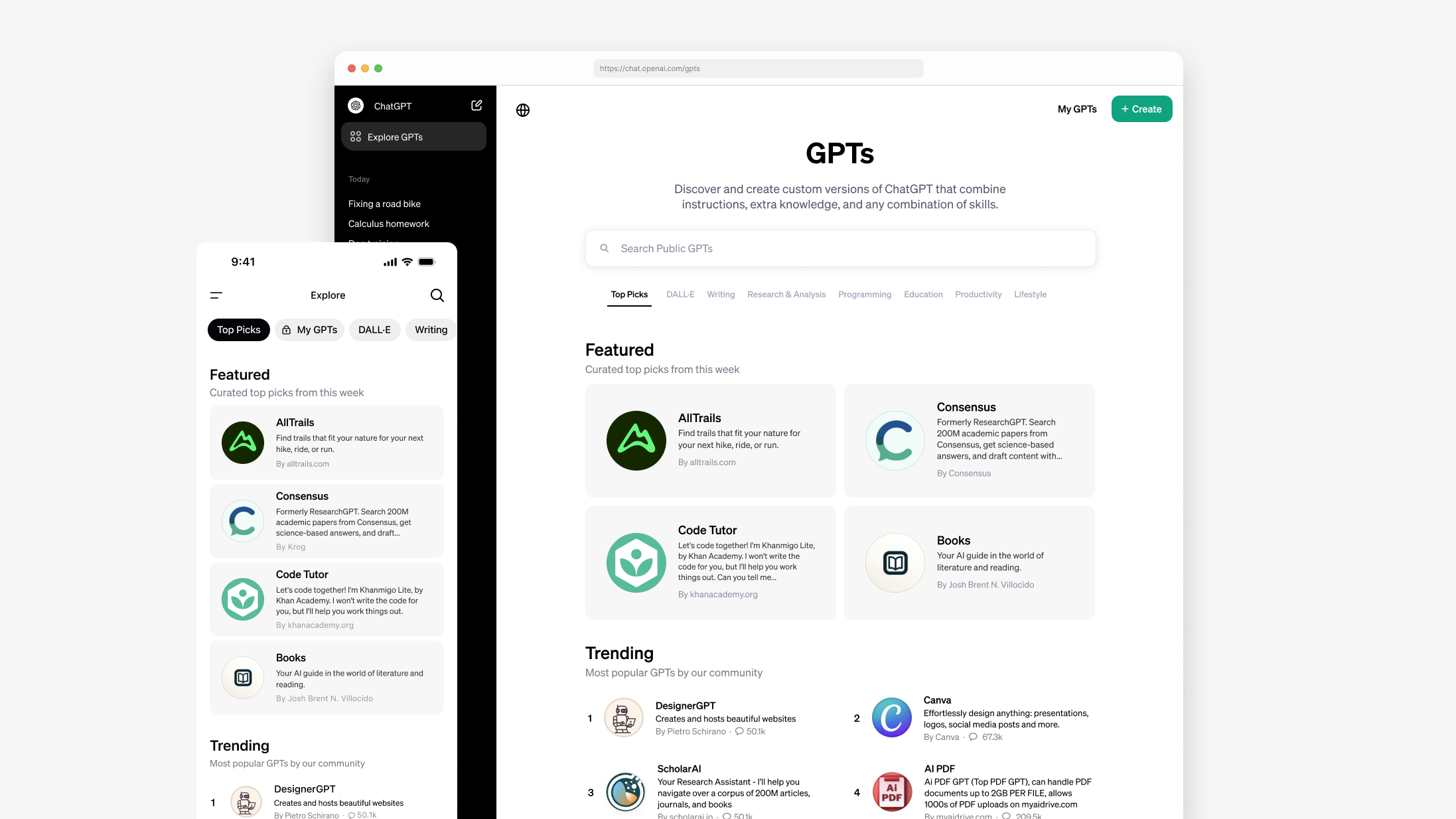
最新消息:OpenAI GPT Store 正式上线,GPTs 应用商店来了!
原文链接 https://openaigptguide.com/gpt-store-and-chatgpt-team/ OpenAI推出的两款新产品和服务:GPT Store和ChatGPT Team,提供了许多全新的解决方案和功能,旨在帮助用户更轻松地使用和构建GPT工具,同时也增加了公司的收入来源…...
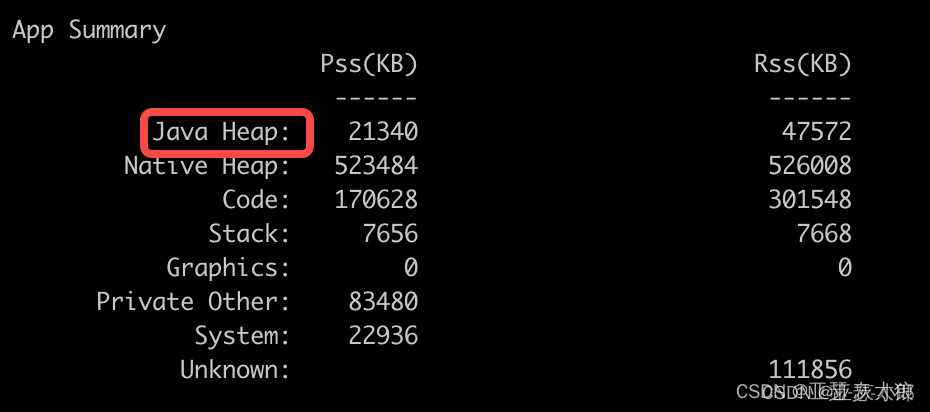
memory泄露分析方法(java篇)
#memory泄露主要分为java和native 2种,本文主要介绍java# 测试每天从monkey中筛选出内存超标的app,提单流转到我 首先,辨别内存泄露类型(java,还是native) 从采到的dumpsys_meminfo_pid看java heap&…...

kubectlkubeletrancherhelmkubeadm这几个命令行工具是什么关系?
背景 在最近学习k8s的过程中,发现kubectl&kubelet&rancher&helm&kubeadm这几个命令怎么在交错使用,他们究竟是什么关系?他们分别应该在什么情况下使用呢?这里我进行了简单的总结,做个区分。 各工具说…...

Day26 669修剪二叉搜索树 108有序数组转为二叉搜索树 538二叉搜索树转换为累加树
669 修剪二叉搜索树 给定一个二叉搜索树,同时给定最小边界L 和最大边界 R。通过修剪二叉搜索树,使得所有节点的值在[L, R]中 (R>L) 。你可能需要改变树的根节点,所以结果应当返回修剪好的二叉搜索树的新的根节点。 class Solution { pub…...
优化CentOS 7.6的HTTP隧道代理网络性能
在CentOS 7.6上,通过HTTP隧道代理优化网络性能是一项复杂且细致的任务。首先,我们要了解HTTP隧道代理的工作原理:通过建立一个安全的隧道,HTTP隧道代理允许用户绕过某些网络限制,提高数据传输的速度和安全性。然而&…...

Spring Boot 3.x 集成AD域实战:从SSL证书踩坑到密码重置,一篇讲透
Spring Boot 3.x 深度集成AD域实战:SSL证书配置与密码策略避坑指南 在企业级应用开发中,Active Directory(AD)集成是身份认证的核心环节。本文将带您深入Spring Boot 3.x与AD域集成的实战细节,特别聚焦于SSL证书配置和…...

终极指南:5分钟快速修复Windows更新问题的完整解决方案
终极指南:5分钟快速修复Windows更新问题的完整解决方案 【免费下载链接】Script-Reset-Windows-Update-Tool This script reset the Windows Update Components. 项目地址: https://gitcode.com/gh_mirrors/sc/Script-Reset-Windows-Update-Tool 当Windows更…...

PowerToys Awake:3种模式彻底解决Windows电脑意外休眠的烦恼
PowerToys Awake:3种模式彻底解决Windows电脑意外休眠的烦恼 【免费下载链接】PowerToys Microsoft PowerToys is a collection of utilities that supercharge productivity and customization on Windows 项目地址: https://gitcode.com/GitHub_Trending/po/Pow…...

从微服务架构设计到团队OKR:聊聊工程师日常中的‘帕累托最优’实践
从微服务架构设计到团队OKR:工程师日常中的‘帕累托最优’实践 在技术团队的实际工作中,我们常常面临各种权衡取舍:微服务拆分时如何平衡模块独立性与系统整体性能?制定OKR时怎样兼顾个人成长与团队目标?这些看似复杂的…...

基于OpenClaw与Binance API的加密货币安全助手:四层架构与实战部署
1. 项目概述:一个为普通人打造的加密资产守护神在加密货币的世界里,技术壁垒和信息不对称就像一道无形的墙,将许多普通人挡在了安全投资的门外。我们见过太多这样的场景:一位想为子女攒点教育金的母亲,因为误点了钓鱼链…...

终极指南:如何使用Gulf of Mexico轻松实现TCP/UDP网络通信
终极指南:如何使用Gulf of Mexico轻松实现TCP/UDP网络通信 【免费下载链接】GulfOfMexico perfect programming language 项目地址: https://gitcode.com/GitHub_Trending/dr/GulfOfMexico Gulf of Mexico(原DreamBerd)是一种创新的编…...

ChatGPT开发者实战指南:从API集成到应用部署的完整资源导航
1. 项目概述:一份面向开发者的ChatGPT资源导航 如果你是一名开发者、产品经理,或者任何对AI应用构建感兴趣的技术爱好者,最近几个月肯定被ChatGPT和GPT-3相关的新闻、工具和项目刷屏了。信息爆炸带来的一个直接问题是:好东西太多…...

PS图片文字修改教程 简单几步完美替换文字内容
日常设计、办公、自媒体创作中,我们经常会遇到需要修改图片文字的场景:海报文案调整、截图信息替换、照片文字修正等。很多人苦于改完文字后模糊留痕、背景破损,要么耗时半天还达不到理想效果。今天就给大家分享两种PS改图片文字的实用方法&a…...

如何使用MIKE IO高效处理水文数据:从零开始构建专业工作流
如何使用MIKE IO高效处理水文数据:从零开始构建专业工作流 【免费下载链接】mikeio Read, write and manipulate dfs0, dfs1, dfs2, dfs3, dfsu and mesh files. 项目地址: https://gitcode.com/gh_mirrors/mi/mikeio 水文数据处理是环境科学、水利工程和海洋…...

为初创团队搭建统一的大模型api网关以控制开发成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为初创团队搭建统一的大模型API网关以控制开发成本 对于初创技术团队而言,快速验证产品想法、迭代功能是生存的关键。在…...