MATLAB - 使用运动学 DH 参数构建机械臂
系列文章目录
前言
一、
使用 Puma560® 机械手机器人的 Denavit-Hartenberg (DH) 参数,逐步建立刚体树形机器人模型。在连接每个关节时,指定其相对 DH 参数。可视化机器人坐标系,并与最终模型进行交互。
DH 参数定义了每个刚体通过关节与其父体连接的几何形状。这些参数遵循四种变换惯例:
- A - 两个 Z 轴之间公共法线的长度,垂直于两个轴
- α - 共同法线的旋转角度
- d - 沿 Z 轴在法线方向上从父代到子代的偏移量
- θ - X 轴沿前 Z 轴的旋转角度
以矩阵形式指定 Puma560 机器人 [1] 的参数。
dhparams = [0 pi/2 0 0;0.4318 0 0 00.0203 -pi/2 0.15005 0;0 pi/2 0.4318 0;0 -pi/2 0 0;0 0 0 0];创建一个刚体树对象
robot = rigidBodyTree;为刚体对象创建一个单元数组,为关节对象创建另一个单元数组。迭代 DH 参数,执行此过程:
- 创建一个具有唯一名称的刚体对象。
- 创建并命名一个外旋刚体关节对象。
- 使用 setFixedTransform 使用 DH 参数指定关节的体到体变换。该函数会忽略 DH 参数的最后一个元素 theta,因为体的角度取决于关节位置。
- 使用 addBody 将躯体附加到刚体树。
bodies = cell(6,1);
joints = cell(6,1);
for i = 1:6bodies{i} = rigidBody(['body' num2str(i)]);joints{i} = rigidBodyJoint(['jnt' num2str(i)],"revolute");setFixedTransform(joints{i},dhparams(i,:),"dh");bodies{i}.Joint = joints{i};if i == 1 % Add first body to baseaddBody(robot,bodies{i},"base")else % Add current body to previous body by nameaddBody(robot,bodies{i},bodies{i-1}.Name)end
end使用 showdetails 或 show 函数验证机器人是否已正确构建。showdetails 功能在 MATLAB® 命令窗口中列出机器人的所有机构。show功能显示指定配置(默认为原点)的机器人。
showdetails(robot)--------------------
Robot: (6 bodies)Idx Body Name Joint Name Joint Type Parent Name(Idx) Children Name(s)--- --------- ---------- ---------- ---------------- ----------------1 body1 jnt1 revolute base(0) body2(2) 2 body2 jnt2 revolute body1(1) body3(3) 3 body3 jnt3 revolute body2(2) body4(4) 4 body4 jnt4 revolute body3(3) body5(5) 5 body5 jnt5 revolute body4(4) body6(6) 6 body6 jnt6 revolute body5(5)
--------------------figure(Name="PUMA Robot Model")
show(robot);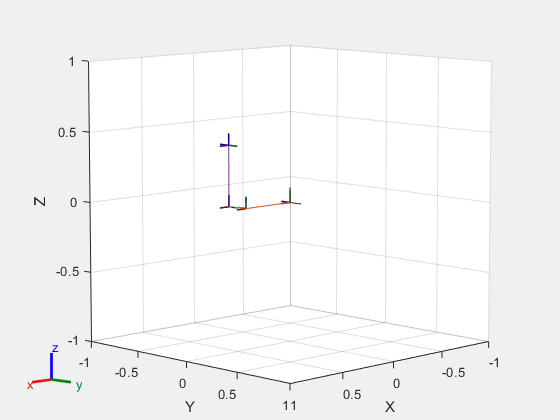
二、与机器人模型互动
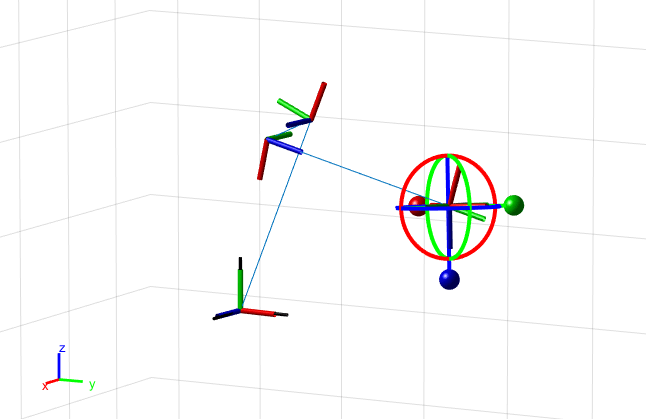
使用交互式刚体树(interactiveRigidBodyTree)对象可视化机器人模型,以确认其尺寸。
figure(Name="Interactive GUI")
gui = interactiveRigidBodyTree(robot,MarkerScaleFactor=0.5);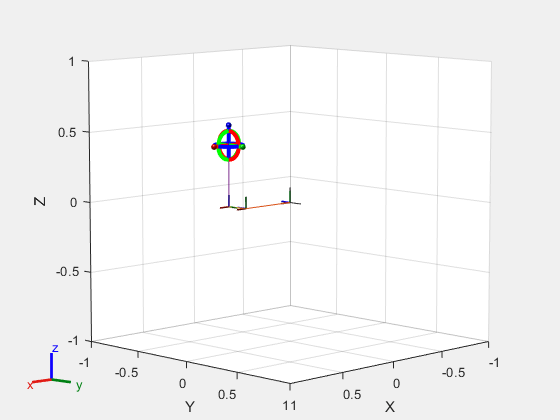
单击并拖动交互式图形用户界面中的标记,重新定位末端执行器。图形用户界面使用逆运动学求解关节位置,以实现与指定末端执行器位置的最佳匹配。右键单击特定的身体坐标系,将其设置为目标标记体,或更改设置特定关节位置的控制方法。
三、下一步
现在您已经在 MATLAB® 中建立了模型,接下来可能要采取以下步骤。
- 执行逆运动学,根据所需的末端执行器位置获得关节配置。除模型参数外,指定机器人约束条件,包括瞄准约束条件、笛卡尔边界和姿势目标。
- 根据航点和其他参数,利用梯形速度曲线、B-样条曲线或多项式轨迹生成轨迹。
- 利用机器人模型和快速探索随机树(RRT)路径规划器执行机械手规划。
- 对环境中的障碍物进行碰撞检测,确保机器人安全有效地运动。
参考资料
[1] Corke, P. I., and B. Armstrong-Helouvry. “A Search for Consensus Among Model Parameters Reported for the PUMA 560 Robot.” Proceedings of the 1994 IEEE International Conference on Robotics and Automation, 1608–13. San Diego, CA, USA: IEEE Computer Soc. Press, 1994. https://doi.org/10.1109/ROBOT.1994.351360.
相关文章:
MATLAB - 使用运动学 DH 参数构建机械臂
系列文章目录 前言 一、 使用 Puma560 机械手机器人的 Denavit-Hartenberg (DH) 参数,逐步建立刚体树形机器人模型。在连接每个关节时,指定其相对 DH 参数。可视化机器人坐标系,并与最终模型进行交互。 DH 参数定义了每个刚体通过关节与其父…...

2024年腾讯云新用户优惠云服务器价格多少?
腾讯云服务器租用价格表:轻量应用服务器2核2G3M价格62元一年、2核2G4M价格118元一年,540元三年、2核4G5M带宽218元一年,2核4G5M带宽756元三年、轻量4核8G12M服务器446元一年、646元15个月,云服务器CVM S5实例2核2G配置280.8元一年…...

如何在原型中实现继承和多态
在JavaScript中,我们可以通过原型链来实现继承。以下是如何在原型中实现继承的例子: // 定义一个动物原型 var Animal function() {}; Animal.prototype.move function() { console.log(‘This animal can move.’); }; // 定义一个狗的原型…...
MySQL/Oracle 的 字符串拼接
目录 MySQL、Oracle 的 字符串拼接1、MySQL 的字符串拼接1.1 CONCAT(str1,str2,...) : 可以拼接多个字符串1.2 CONCAT_WS(separator,str1,str2,...) : 指定分隔符拼接多个字符串1.3 GROUP_CONCAT(expr) : 聚合函数,用于将多行的值连接成一个字符串。 2、Oracle 的字…...

【Java SE语法篇】10.String类
📚博客主页:爱敲代码的小杨. ✨专栏:《Java SE语法》 ❤️感谢大家点赞👍🏻收藏⭐评论✍🏻,您的三连就是我持续更新的动力❤️ 文章目录 前言1. String类1.1 字符串的构造1.2 String对象的比…...
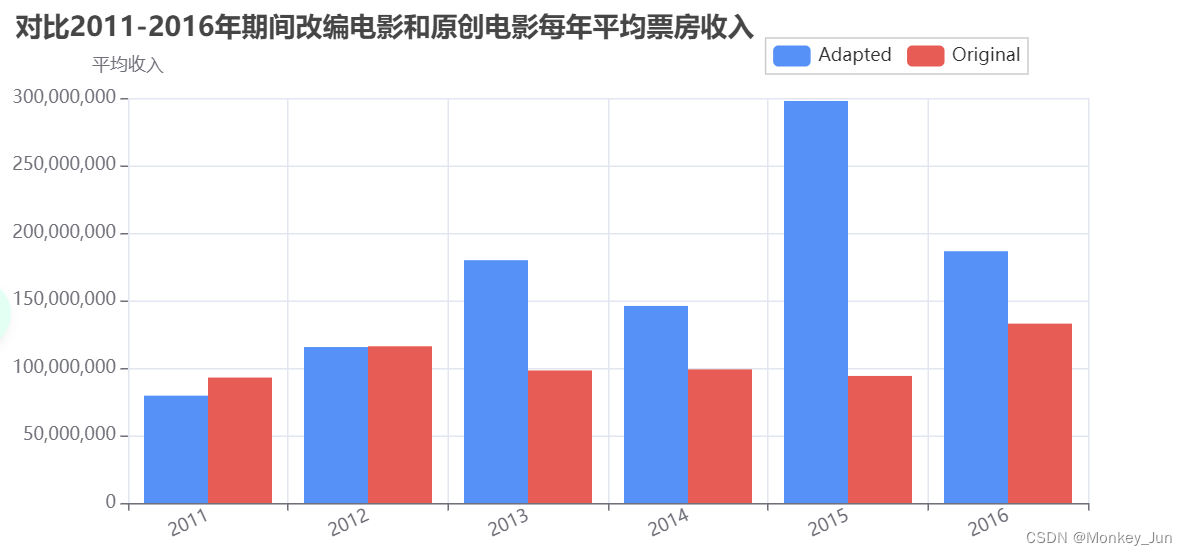
【Python】数据可视化--基于TMDB_5000_Movie数据集
一、数据准备 tmdb_5000_movie数据集下载 二、数据预处理 观察数据集合情况 import pandas as pd import ast import warnings warnings.filterwarnings(ignore) # 加载数据集 df pd.read_csv(tmdb_5000_movies.csv) # 查看数据集信息 print(df.info()) 由于原数据集包含的…...

学习Vue的插槽总结
今天学习了Vue的插槽,在这之前学习使用组件的使用还没有试过在父组件中给子组件插入html结构,今天学习的插槽正是拿来实现这一功能的,这也是一种组件中通信的方式,首先插槽分为三类:默认插槽、具名插槽、作用域插槽。接…...

第九篇 API设计原则与最佳实践
深入浅出HTTP请求前后端交互系列专题 第一章 引言-HTTP协议基础概念和前后端分离架构请求交互概述 第二章 HTTP请求方法、状态码详解与缓存机制解析 第三章 前端发起HTTP请求 第四章 前后端数据交换格式详解 第五章 跨域资源共享(CORS):现代W…...

新版AndroidStudio配置maven阿里云镜像
project下的build.gradle: // Top-level build file where you can add configuration options common to all sub-projects/modules. // 注意jdk版本需要17以上,因为8.1.3的gradle需要jdk17以上 //plugins { // id com.android.application version…...

【OSG案例详细分析与讲解】之十一:【多效果的3D动画】
目录 一、【多效果的3D动画】前言 二、【多效果的3D动画】实现效果...

一道使用LinkedList和Stack解决的算法题
一、无法吃午餐的学生数量 学校的自助午餐提供圆形和方形的三明治,分别用数字 0 和 1 表示。所有学生站在一个队列里,每个学生要么喜欢圆形的要么喜欢方形的。 餐厅里三明治的数量与学生的数量相同。所有三明治都放在一个 栈 里,每一轮&#…...
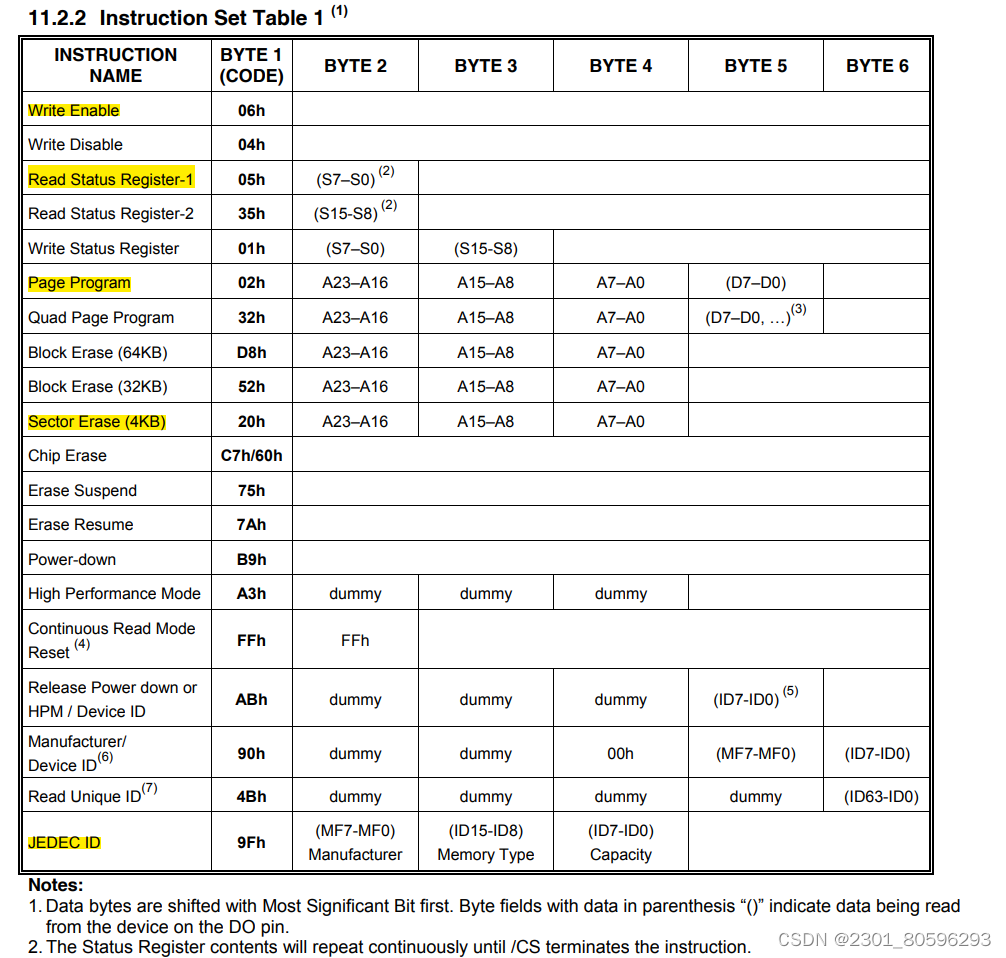
通用外设-W25Q64
前言 一、SPI通信 二、W25Q64基初时序 1.各种命令代码 2.代码 1.写使能指令 2.读取芯片是否忙碌状态并等待 3.写入数据 4.擦除函数操作 5.读取代码 三.验证 四.擦除说明 总结 前言 在单片机中一般32K FLASH就够用了,但是当我们使用图片或其他大量数据时…...

Spring MVC MVC介绍和入门案例
1.SpringMVC概述 1.1.MVC介绍 MVC是一种设计模式,将软件按照模型、视图、控制器来划分: M:Model,模型层,指工程中的JavaBean,作用是处理数据 JavaBean分为两类: 一类称为数据承载Bean…...

android使用ndk开发
ndk ndk sdk要单独下载和android sdk不同 https://developer.android.google.cn/ndk/downloads?hl=zh-cn 解压后添加ndk路径到path即可 gradle gradle下载太慢使用国内镜像 distributionUrl=https://mirrors.cloud.tencent.com/gradle/gradle-6.7.1-all.zip 执行gradlew.ba…...

行为型设计模式——模板方法模式
学习难度:⭐ ,比较常用 模板方法模式 在面向对象程序设计过程中,程序员常常会遇到这种情况:设计一个系统时知道了算法所需的关键步骤,而且确定了这些步骤的执行顺序,但某些步骤的具体实现还未知࿰…...
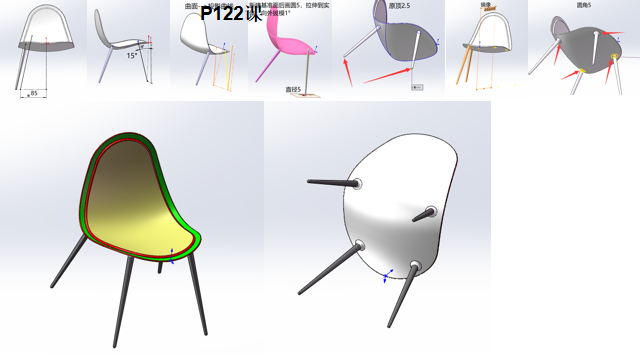
曲面上偏移命令的查找
今天学习老王的SW绘图时,遇到一个命令找不到,查询了一会终于找到了这个命令,防止自己忘记,特此记录一下,这个命令就是“曲面上偏移”,网上好多的教程都是错误的,实际上这个命令没有在曲面里面&a…...
世邦spon IP网络对讲广播系统任意文件上传漏洞
产品介绍 世邦通信IP网络对讲广播系统采用领先的IPAudio™技术,将音频信号以数据包形式在局域网和广域网上进行传送,是一套纯数字传输系统。 漏洞描述 spon IP网络对讲广播系统存在任意文件上传漏洞,攻击者可以通过构造特殊请求包上传恶意后门文件,从…...
mp4文件全部转换为mp3
问题 今天突发奇想,想把mp4视频转换为mp3来收听,于是想到了ffmpeg工具 步骤 安装ffmpeg环境 要在 Windows 上配置 FFmpeg 环境,你可以按照以下步骤进行操作: 下载 FFmpeg: 首先,你需要下载 FFmpeg 的 W…...

深信服技术认证“SCSA-S”划重点:逻辑漏洞
为帮助大家更加系统化地学习网络安全知识,以及更高效地通过深信服安全服务认证工程师考核,深信服特别推出“SCSA-S认证备考秘笈”共十期内容,“考试重点”内容框架,帮助大家快速get重点知识~ 划重点来啦 *点击图片放大展示 深信服…...
)
Linux grep命令教程:强大的文本搜索工具(附案例详解和注意事项)
Linux grep命令介绍 grep (Global Regular Expression Print)命令用来在文件中查找包含或者不包含某个字符串的行,它是强大的文本搜索工具,并可以使用正则表达式进行搜索。当你需要在文件或者多个文件中搜寻特定信息时,grep就显得无比重要啦…...
)
GCN vs MLP:在Cora数据集上,图神经网络到底强在哪?(附可视化对比)
GCN与MLP在Cora数据集上的本质差异:从特征聚合到空间重构的认知升级当我们面对学术文献分类任务时,传统机器学习方法往往将每篇文献视为独立个体进行处理。这种处理方式在Cora数据集上通常只能获得约50%的分类准确率,而图卷积网络(GCN)却能轻…...
)
esp开发与应用(1602液晶显示屏)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】模块当中,有的是比较简单的,比如说蜂鸣器,尤其是有源蜂鸣器。大家可以把它想象成是一个gpio输出的喇叭ÿ…...
)
Win10升级21H2后远程桌面黑屏?一个组策略设置帮你搞定(附gpedit.msc详细路径)
Windows 10 21H2远程桌面黑屏故障深度解析与精准修复方案当你从Windows 10 1909版本升级到21H2后,是否遇到过这样的场景:远程桌面连接看似成功,却在15秒后突然黑屏断开,只留下"您的远程桌面会话已结束"的模糊提示&#…...
)
ChatGPT生成内容同质化困局破局术:用故事化表达重构人机协作范式(仅限首批200位读者获取的叙事权重矩阵)
更多请点击: https://codechina.net 第一章:叙事权重矩阵的底层逻辑与人机协作范式跃迁 叙事权重矩阵并非传统意义上的数值张量,而是一种动态语义映射结构,它将人类叙事意图、上下文可信度、模型生成置信度及跨模态对齐信号统一编…...

HashMap 源码解析 底层原理 面试如何回答
HashMap 源码解析 底层原理 面试如何回答 一、参考资料 【Java视频教程,java入门神器(附300道Java面试题剖析)】 https://www.bilibili.com/video/BV1PY411e7J6/?p172&share_sourcecopy_web&vd_source855891859b2dc554eace9de3f28b4…...

终极AMD Ryzen调试工具:免费开源的硬件掌控神器
终极AMD Ryzen调试工具:免费开源的硬件掌控神器 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https://gitcode.…...

多模态AI Agent架构:如何无缝融合文本、图像与行动?
多模态AI Agent架构:如何无缝融合文本、图像与行动? 摘要 随着GPT-4V、Gemini等多模态大模型的普及,AI已经从“能读会写”的文本时代进入“能看会认”的多模态时代,但当前绝大多数多模态应用仍停留在“感知-回答”的表层交互,缺乏将多模态感知结果转化为实际行动的能力。…...

Loop:终极免费开源Mac窗口管理工具,彻底解决桌面杂乱问题
Loop:终极免费开源Mac窗口管理工具,彻底解决桌面杂乱问题 【免费下载链接】Loop Window management made elegant. 项目地址: https://gitcode.com/GitHub_Trending/lo/Loop 你是否曾经因为Mac上杂乱的窗口布局而效率低下?当多个应用同…...

ALMA评审系统:基于分层规则与LDA的专家精准匹配工程实践
1. 项目概述:当评审专家遇上“千人千面”的提案在科研项目管理,尤其是大型天文观测设施如ALMA(阿塔卡马大型毫米/亚毫米波阵列)的提案评审中,一个核心的工程难题是如何把一份探讨“原行星盘尘埃动力学”的提案…...
【含Matlab源码 15560期】)
【流体】对沼气厂管道系统进行流体动力学设计和成本优化(最小化总年化成本TAC)【含Matlab源码 15560期】
💥💥💥💥💥💥💥💥💞💞💞💞💞💞💞💞💞Matlab武动乾坤博客之家💞…...