大创项目推荐 深度学习疫情社交安全距离检测算法 - python opencv cnn
文章目录
- 0 前言
- 1 课题背景
- 2 实现效果
- 3 相关技术
- 3.1 YOLOV4
- 3.2 基于 DeepSort 算法的行人跟踪
- 4 最后
0 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 **基于深度学习疫情社交安全距离检测算法 **
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:5分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
1 课题背景
安全的社交距离是公共预防传染病毒的途径之一。所以,在人群密集的区域进行社交距离的安全评估是十分重要的。社交距离的测量旨在保持个体之间的物理距离和减少相互接触的人群来减缓或阻止病毒传播,在抗击病毒和预防大流感中发挥重要作用。但时刻保持安全距离具有一定的难度,特别是在校园,工厂等场所,在这种情况下,开发智能摄像头等技术尤为关键。将人工智能,深度学习集成至安全摄像头对行人进行社交距离评估。现阶段针对疫情防范的要求,主要采用人工干预和计算机处理技术。人工干预存在人力资源要求高,风险大,时间成本高等等缺点。计算机处理等人工智能技术的发展,对社交安全距离的安全评估具有良好的效果。
2 实现效果
通过距离分类人群的高危险和低危险距离。
相关代码
import argparse
from utils.datasets import *
from utils.utils import *def detect(save_img=False):out, source, weights, view_img, save_txt, imgsz = \opt.output, opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_sizewebcam = source == '0' or source.startswith('rtsp') or source.startswith('http') or source.endswith('.txt')# Initializedevice = torch_utils.select_device(opt.device)if os.path.exists(out):shutil.rmtree(out) # delete output folderos.makedirs(out) # make new output folderhalf = device.type != 'cpu' # half precision only supported on CUDA# Load modelgoogle_utils.attempt_download(weights)model = torch.load(weights, map_location=device)['model'].float() # load to FP32# torch.save(torch.load(weights, map_location=device), weights) # update model if SourceChangeWarning# model.fuse()model.to(device).eval()if half:model.half() # to FP16# Second-stage classifierclassify = Falseif classify:modelc = torch_utils.load_classifier(name='resnet101', n=2) # initializemodelc.load_state_dict(torch.load('weights/resnet101.pt', map_location=device)['model']) # load weightsmodelc.to(device).eval()# Set Dataloadervid_path, vid_writer = None, Noneif webcam:view_img = Truetorch.backends.cudnn.benchmark = True # set True to speed up constant image size inferencedataset = LoadStreams(source, img_size=imgsz)else:save_img = Truedataset = LoadImages(source, img_size=imgsz)# Get names and colorsnames = model.names if hasattr(model, 'names') else model.modules.namescolors = [[random.randint(0, 255) for _ in range(3)] for _ in range(len(names))]# Run inferencet0 = time.time()img = torch.zeros((1, 3, imgsz, imgsz), device=device) # init img_ = model(img.half() if half else img) if device.type != 'cpu' else None # run oncefor path, img, im0s, vid_cap in dataset:img = torch.from_numpy(img).to(device)img = img.half() if half else img.float() # uint8 to fp16/32img /= 255.0 # 0 - 255 to 0.0 - 1.0if img.ndimension() == 3:img = img.unsqueeze(0)# Inferencet1 = torch_utils.time_synchronized()pred = model(img, augment=opt.augment)[0]# Apply NMSpred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres,fast=True, classes=opt.classes, agnostic=opt.agnostic_nms)t2 = torch_utils.time_synchronized()# Apply Classifierif classify:pred = apply_classifier(pred, modelc, img, im0s)# List to store bounding coordinates of peoplepeople_coords = []# Process detectionsfor i, det in enumerate(pred): # detections per imageif webcam: # batch_size >= 1p, s, im0 = path[i], '%g: ' % i, im0s[i].copy()else:p, s, im0 = path, '', im0ssave_path = str(Path(out) / Path(p).name)s += '%gx%g ' % img.shape[2:] # print stringgn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwhif det is not None and len(det):# Rescale boxes from img_size to im0 sizedet[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()# Print resultsfor c in det[:, -1].unique():n = (det[:, -1] == c).sum() # detections per classs += '%g %ss, ' % (n, names[int(c)]) # add to string# Write resultsfor *xyxy, conf, cls in det:if save_txt: # Write to filexywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywhwith open(save_path[:save_path.rfind('.')] + '.txt', 'a') as file:file.write(('%g ' * 5 + '\n') % (cls, *xywh)) # label formatif save_img or view_img: # Add bbox to imagelabel = '%s %.2f' % (names[int(cls)], conf)if label is not None:if (label.split())[0] == 'person':people_coords.append(xyxy)# plot_one_box(xyxy, im0, line_thickness=3)plot_dots_on_people(xyxy, im0)# Plot lines connecting peopledistancing(people_coords, im0, dist_thres_lim=(200,250))# Print time (inference + NMS)print('%sDone. (%.3fs)' % (s, t2 - t1))# Stream resultsif view_img:cv2.imshow(p, im0)if cv2.waitKey(1) == ord('q'): # q to quitraise StopIteration# Save results (image with detections)if save_img:if dataset.mode == 'images':cv2.imwrite(save_path, im0)else:if vid_path != save_path: # new videovid_path = save_pathif isinstance(vid_writer, cv2.VideoWriter):vid_writer.release() # release previous video writerfps = vid_cap.get(cv2.CAP_PROP_FPS)w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*opt.fourcc), fps, (w, h))vid_writer.write(im0)if save_txt or save_img:print('Results saved to %s' % os.getcwd() + os.sep + out)if platform == 'darwin': # MacOSos.system('open ' + save_path)print('Done. (%.3fs)' % (time.time() - t0))
3 相关技术
3.1 YOLOV4
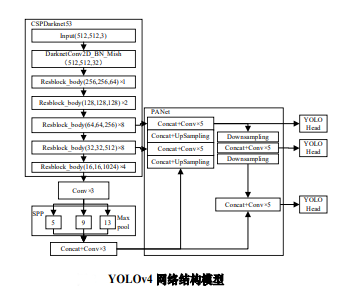
YOLOv4使用卷积网络 CSPDarknet-53 特征提取,网络结构模型如图 2 所示。在每个 Darknet-53的残块行加上 CSP(Cross
Stage Partial)结构13,将基础层划分为两部分,再通过跨层次结构的特征融合进行合并。并采用 FPN( feature pyramid
networks)结构加强特征金字塔,最后用不同层的特征的高分辨率来提取不同尺度特征图进行对象检测。最终网络输出 3
个不同尺度的特征图,在三个不同尺度特征图上分别使用 3 个不同的先验框(anchors)进行预测识别,使得远近大小目标均能得到较好的检测。
YOLOv4 的先验框尺寸是经PASCALL_VOC,COCO
数据集包含的种类复杂而生成的,并不一定完全适合行人。本研究旨在研究行人之间的社交距离,针对行人目标检测,利用聚类算法对 YOLOv4
的先验框微调,首先将行人数据集 F 依据相似性分为i个对象,即 ,其中每个对象都具有 m
,其中每个对象都具有 m
个维度的属性。聚类算法的目的是 i 个对象依据相似性聚集到指定的 j 个类簇,每个对象属于且仅属于一个其到类簇中心距离最小的类簇中心。初始化 j 个 聚 类
中 心 ,计算每一个对象到每一个聚类中心的欧式距离,见公式
,计算每一个对象到每一个聚类中心的欧式距离,见公式
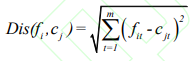
之后,依次比较每个对象到每个聚类中心的距离,将对象分配至距离最近的簇类中心的类簇中,
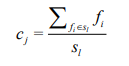
得到  个类簇
个类簇 ,聚类算法中定义了类簇的原型,类簇中心就是类簇内所有对象在各个维度的均值,其公式见
,聚类算法中定义了类簇的原型,类簇中心就是类簇内所有对象在各个维度的均值,其公式见
相关代码
def check_anchors(dataset, model, thr=4.0, imgsz=640):# Check anchor fit to data, recompute if necessaryprint('\nAnalyzing anchors... ', end='')m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)])).float() # whdef metric(k): # compute metricr = wh[:, None] / k[None]x = torch.min(r, 1. / r).min(2)[0] # ratio metricbest = x.max(1)[0] # best_xreturn (best > 1. / thr).float().mean() # best possible recallbpr = metric(m.anchor_grid.clone().cpu().view(-1, 2))print('Best Possible Recall (BPR) = %.4f' % bpr, end='')if bpr < 0.99: # threshold to recomputeprint('. Attempting to generate improved anchors, please wait...' % bpr)na = m.anchor_grid.numel() // 2 # number of anchorsnew_anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)new_bpr = metric(new_anchors.reshape(-1, 2))if new_bpr > bpr: # replace anchorsnew_anchors = torch.tensor(new_anchors, device=m.anchors.device).type_as(m.anchors)m.anchor_grid[:] = new_anchors.clone().view_as(m.anchor_grid) # for inferencem.anchors[:] = new_anchors.clone().view_as(m.anchors) / m.stride.to(m.anchors.device).view(-1, 1, 1) # lossprint('New anchors saved to model. Update model *.yaml to use these anchors in the future.')else:print('Original anchors better than new anchors. Proceeding with original anchors.')print('') # newline
3.2 基于 DeepSort 算法的行人跟踪
YOLOv4中完成行人目标检测后生成边界框(Bounding box,Bbox),Bbox 含有包含最小化行人边框矩形的坐标信息,本研究引入
DeepSort 算法[18]完成对行人的质点进行跟踪,目的是为了在运动矢量分析时算行人安全社交距离中。首先,对行人进行质点化计算。其质点计算公式如
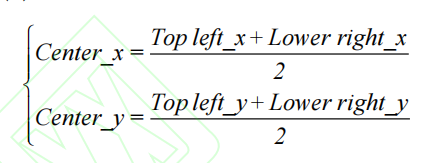
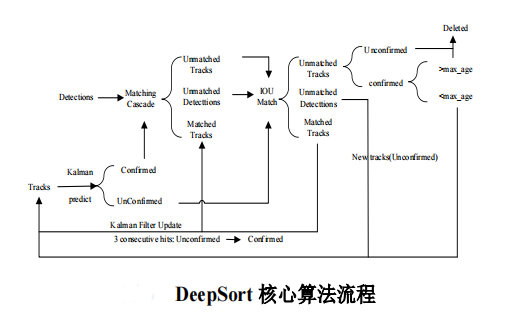
确定行人质点后,利用 DeepSort 算法实现对多个目标的精确定位与跟踪,其核心算法流程如图所示:
相关代码
class TrackState:'''单个轨迹的三种状态'''Tentative = 1 #不确定态Confirmed = 2 #确定态Deleted = 3 #删除态class Track:def __init__(self, mean, covariance, track_id, class_id, conf, n_init, max_age,feature=None):'''mean:位置、速度状态分布均值向量,维度(8×1)convariance:位置、速度状态分布方差矩阵,维度(8×8)track_id:轨迹IDclass_id:轨迹所属类别hits:轨迹更新次数(初始化为1),即轨迹与目标连续匹配成功次数age:轨迹连续存在的帧数(初始化为1),即轨迹出现到被删除的连续总帧数time_since_update:轨迹距离上次更新后的连续帧数(初始化为0),即轨迹与目标连续匹配失败次数state:轨迹状态features:轨迹所属目标的外观语义特征,轨迹匹配成功时添加当前帧的新外观语义特征conf:轨迹所属目标的置信度得分_n_init:轨迹状态由不确定态到确定态所需连续匹配成功的次数_max_age:轨迹状态由不确定态到删除态所需连续匹配失败的次数''' self.mean = meanself.covariance = covarianceself.track_id = track_idself.class_id = int(class_id)self.hits = 1self.age = 1self.time_since_update = 0self.state = TrackState.Tentativeself.features = []if feature is not None:self.features.append(feature) #若不为None,初始化外观语义特征self.conf = confself._n_init = n_initself._max_age = max_agedef increment_age(self):'''预测下一帧轨迹时调用'''self.age += 1 #轨迹连续存在帧数+1self.time_since_update += 1 #轨迹连续匹配失败次数+1def predict(self, kf):'''预测下一帧轨迹信息'''self.mean, self.covariance = kf.predict(self.mean, self.covariance) #卡尔曼滤波预测下一帧轨迹的状态均值和方差self.increment_age() #调用函数,age+1,time_since_update+1def update(self, kf, detection, class_id, conf):'''更新匹配成功的轨迹信息'''self.conf = conf #更新置信度得分self.mean, self.covariance = kf.update(self.mean, self.covariance, detection.to_xyah()) #卡尔曼滤波更新轨迹的状态均值和方差self.features.append(detection.feature) #添加轨迹对应目标框的外观语义特征self.class_id = class_id.int() #更新轨迹所属类别self.hits += 1 #轨迹匹配成功次数+1self.time_since_update = 0 #匹配成功时,轨迹连续匹配失败次数归0if self.state == TrackState.Tentative and self.hits >= self._n_init:self.state = TrackState.Confirmed #当连续匹配成功次数达标时轨迹由不确定态转为确定态def mark_missed(self):'''将轨迹状态转为删除态'''if self.state == TrackState.Tentative:self.state = TrackState.Deleted #当级联匹配和IOU匹配后仍为不确定态elif self.time_since_update > self._max_age:self.state = TrackState.Deleted #当连续匹配失败次数超标'''该部分还存在一些轨迹坐标转化及状态判定函数,具体可参考代码来源'''
4 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
大创项目推荐 深度学习疫情社交安全距离检测算法 - python opencv cnn
文章目录 0 前言1 课题背景2 实现效果3 相关技术3.1 YOLOV43.2 基于 DeepSort 算法的行人跟踪 4 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 **基于深度学习疫情社交安全距离检测算法 ** 该项目较为新颖,适合作为竞赛…...

c语言-库函数strstr()、strtok()、strerror()介绍
文章目录 前言一、库函数strstr()1.1 strstr()介绍1.2 strstr()模拟实现 二、库函数strtok()2.1 strtok()介绍 三、库函数strerror()3.1 strerror()介绍 总结 前言 本篇文章介绍c语言库函数strstr()、strtok()、strerror()的使用。 一、库函数strstr() 1.1 strstr()介绍 str…...
RIP【新华三与华为区别】
【介绍】 rip分为rip 1 与 rip 2 ,rip 2 是对 rip 1 的一种升级,rip 2 可以进行认证等功能 【命令】 新华三: [HC3-R1] rip #启用rip [HC3-R1-rip] version 2 #告知rip 版本号 [HC3-R1-rip] network 192.168.1.0 #宣告其网段 [HC3-R1-rip] …...

Python从入门到精通秘籍四
Python速成,知识点超详细,跟着这个系列边输入边学习体会吧! 一、Python的判断语句的综合案例 下面是一个使用代码示例来详细说明Python判断语句的综合案例,通过用户输入来实现简单的登录验证: # 提示用户输入用户名和密码 username = input("请输入用户名:")…...

rk3568下SoftBusDumpDeviceInfo执行错误—鸿蒙开发已解决
文章目录 项目场景:问题描述原因分析:解决方案:此Bug解决方案总结寄语项目场景: 最近也是遇到了这个问题,看到网上也有人在询问这个问题,本文总结了自己和其他人的解决经验,解决了rk3568下SoftBusDumpDeviceInfo执行错误的问题。 命令行运行 SoftBusDumpDeviceInfo,测…...

Vue 3 Composition API 详解
一、引言 在Vue 3中,引入了一个新的Composition API,旨在提供一种更灵活和可重用的方式来组织组件代码。Composition API基于函数式编程思想,允许开发者将逻辑和状态管理逻辑分离,使代码更加清晰和可维护。 二、Composition API…...
API设计:从基础到最佳实践
1*vWvkkgG6uvgmJT8GkId98A.png 在这次深入探讨中,我们将深入了解API设计,从基础知识开始,逐步进阶到定义出色API的最佳实践。 作为开发者,你可能对许多这些概念很熟悉,但我将提供详细的解释,以加深你的理解…...

每日汇评:由于中东危机削弱了风险偏好,欧元将在1.0900附近波动
随着中东危机的加深,欧元兑美元面临大幅抛售; 由于高通胀,欧洲央行决策者推迟了市场对早期降息的预期; 市场将受到周三公布的美国零售销售数据的影响; 持续的中东紧张局势增强了对避险资产的吸引力,而风险感…...

算法每日一题:删除子串后的字符串最小长度 | 栈 | 字符串
大家好,我是星恒 今天给大家带来的是一道另类的栈的应用 话不多说,我们直接来体验 题目:leetcode 2696 给你一个仅由 大写 英文字符组成的字符串 s 。你可以对此字符串执行一些操作,在每一步操作中,你可以从 s 中删除 …...
SpringFramework实战指南(一)
SpringFramework实战指南(一) 一、技术体系结构1.1 总体技术体系1.2 框架概念和理解 一、技术体系结构 1.1 总体技术体系 单一架构 一个项目,一个工程,导出为一个war包,在一个Tomcat上运行。也叫all in one。 单一架…...

AtCoder ABC198
本期F为群论题,很有难度。 C - Compass Walking 为了避免精度问题,采用二分推算。但是要小心结果为1的地方。 R 2 ∗ k 2 ≥ x 2 y 2 R^2*k^2\geq x^2y^2 R2∗k2≥x2y2 # -*- coding: utf-8 -*- # time : 2023/6/2 13:30 # file : atcoder.…...

phpinfo和php -m 加载的php.ini不一致
目的: 将phpinfo在web中展示的php.ini和在命令行中展示的php.ini加载路径设置一致。 原本的php.ini加载路劲是: /usr/local/lib/php.ini 解决思路: (1)which php 查看服务器加载的php的位置,这里原来是&a…...

121.买卖股票的最佳时机 122.买卖股票的最佳时机II
121.买卖股票的最佳时机 122.买卖股票的最佳时机II 121.买卖股票的最佳时机 力扣题目链接(opens new window) 给定一个数组 prices ,它的第 i 个元素 prices[i] 表示一支给定股票第 i 天的价格。 你只能选择 某一天 买入这只股票,并选择在 未来的某一…...

Spring Boot整理-Spring Boot是什么?
Spring Boot 是一个开源的 Java 基础框架,它旨在简化基于 Spring 的应用开发。其核心特点在于“约定优于配置”的设计哲学,意味着它提供了一系列默认配置,从而帮助开发者更快地启动和运行新的 Spring 应用。Spring Boot 的主要特点包括: 自动配置:Spring Boot 可以根据项目…...

【pytorch】Pytorch 中的 grid 与 各种变换
Pytorch 中的 grid 与 各种变换 数学原理 **单应性(Homography) : 也就是透视变换。**单应性最初用来研究欧几里得几何中的透视和投影,而单应性一词,从词源学上来说,大致意思是“相似的绘图”。单应性的概念被引入来…...
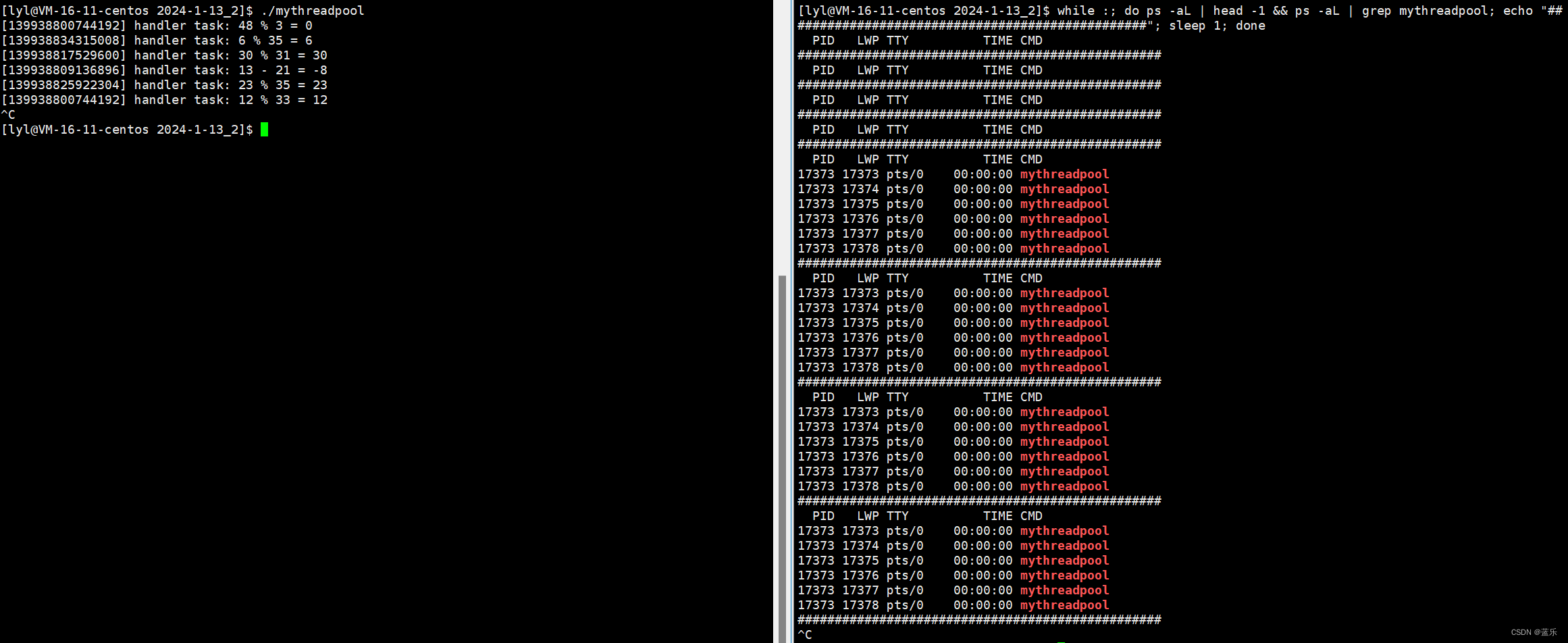
【Linux】线程池实现
📗线程池实现(单例模式) 1️⃣线程池概念2️⃣线程池代码样例3️⃣部分问题与细节🔸类成员函数参数列表中隐含的this指针🔸单例模式🔸一个失误导致的bug 4️⃣调用线程池完成任务 1️⃣线程池概念 线程池是…...

使用Python批量上传本地maven库到nexus
背景:外包类项目开发时是调用的公司maven仓库进行开发,交付后需要将maven仓库转移到客户环境。 原理:1、打开idea运行源代码,将maven包下载到本地仓库, 2、下载包所在目录中执行脚本将本地仓库的maven包上传到客户nex…...
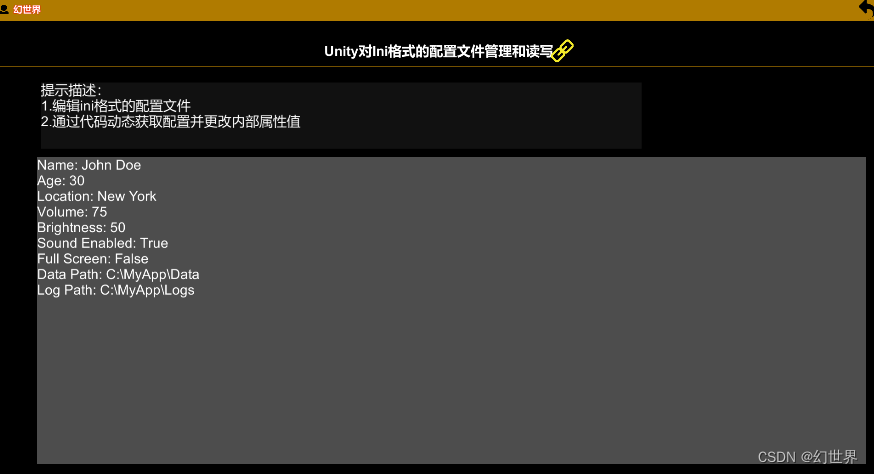
【Unity实战100例】Unity对Ini格式的配置文件管理和读写
目录 一.编写ini格式配置文件 二.读取解析ini文件 三.调用属性 INI 文件以文本形式存储,易于阅读和编辑。这种人可读的格式使得调整配置参数变得更加直观,不需要专门的工具。 INI 文件是一种轻量级的配置文件格式,不需要复杂的解析器或库。它的结构相对简单,适用于小到...

k8s存储卷和数据卷下
静态pv和pvc 运维负责pv:创建号持久化存储卷,申明好读写和挂载类型,以及可以提供的存储空间 Pvc开发做,要和开发沟通好,你期望的读写和挂载类型,以及存储空间 当我发布vc之后可以生成pv,还可以在…...
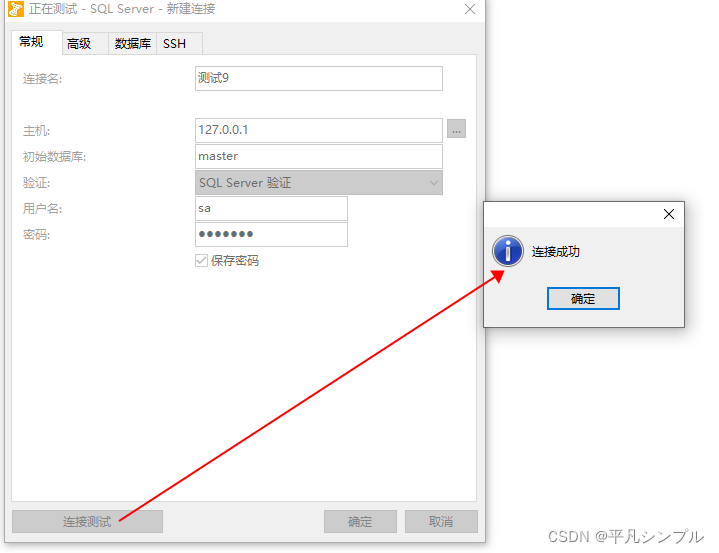
SQL Server 配置远程连接
Windows 安装好 SQL Server 的 SSMS,打开SSMS配置远程连接 找到 配置管理器 启用 TCP/IP 打开防火墙设置 新建入站规则 端口TCP - 特定本地端口 (1433)允许连接下一步名称完成 重启 SQL Server 服务...

深度解析ESLyric-LyricsSource:Foobar2000逐字歌词插件的终极技术方案
深度解析ESLyric-LyricsSource:Foobar2000逐字歌词插件的终极技术方案 【免费下载链接】ESLyric-LyricsSource Advanced lyrics source for ESLyric in foobar2000 项目地址: https://gitcode.com/gh_mirrors/es/ESLyric-LyricsSource ESLyric-LyricsSource是…...

混合精度递归Cholesky分解:算法优化与硬件加速实践
1. 混合精度递归Cholesky分解的技术背景在科学计算领域,对称正定(SPD)线性系统的求解是一个基础而关键的问题。这类问题广泛存在于计算流体动力学、气候建模、金融风险分析等实际应用中。以气候建模为例,全球大气环流模型需要求解的线性系统矩阵规模可达…...

洛雪音乐音源终极配置指南:三步解决音乐播放难题
洛雪音乐音源终极配置指南:三步解决音乐播放难题 【免费下载链接】lxmusic- lxmusic(洛雪音乐)全网最新最全音源 项目地址: https://gitcode.com/gh_mirrors/lx/lxmusic- 你是否经常遇到音乐播放器找不到想听的歌曲?是否厌倦了在各个平台间切换只…...

洛雪音乐音源项目完整指南:免费获取全网高品质音乐的终极解决方案
洛雪音乐音源项目完整指南:免费获取全网高品质音乐的终极解决方案 【免费下载链接】lxmusic- lxmusic(洛雪音乐)全网最新最全音源 项目地址: https://gitcode.com/gh_mirrors/lx/lxmusic- 洛雪音乐音源项目是一个专为洛雪音乐软件设计的开源音源集合…...

hoverboard-firmware-hack-FOC与ROS集成指南:机器人操作系统通信接口开发
hoverboard-firmware-hack-FOC与ROS集成指南:机器人操作系统通信接口开发 【免费下载链接】hoverboard-firmware-hack-FOC With Field Oriented Control (FOC) 项目地址: https://gitcode.com/GitHub_Trending/ho/hoverboard-firmware-hack-FOC hoverboard-f…...

inject源码解析:从Graph到Object的完整依赖图构建指南
inject源码解析:从Graph到Object的完整依赖图构建指南 【免费下载链接】inject Package inject provides a reflect based injector. 项目地址: https://gitcode.com/gh_mirrors/inje/inject inject是一个基于反射的Go语言依赖注入库,能够自动构建…...

终极免费方案:cursor-vip完全指南,让AI编程助手触手可及
终极免费方案:cursor-vip完全指南,让AI编程助手触手可及 【免费下载链接】cursor-vip cursor IDE enjoy VIP 项目地址: https://gitcode.com/gh_mirrors/cu/cursor-vip 你是否为高昂的AI编程助手订阅费而苦恼?cursor-vip为你提供了一套…...

Taotoken的模型广场如何辅助开发者进行技术选型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的模型广场如何辅助开发者进行技术选型 对于需要集成大模型能力的开发者而言,面对市场上众多的模型提供商、复…...

深度解析 | SRE 核心机制:如何通过“错误预算”平衡速度与稳定性?
在网站可靠性工程 (SRE) 的世界中,在创新的速度与系统的稳定性之间找到完美的平衡是一项持续的挑战。虽然开发团队致力于快速发布新功能,但运维团队和 SRE 的目标则是保持系统平稳运行且不中断。这种利益冲突常常导致团队之间的摩擦。而这正是错误预算 (…...

Open WebUI企业级部署指南:全功能AI平台架构与生产环境实践
Open WebUI企业级部署指南:全功能AI平台架构与生产环境实践 【免费下载链接】open-webui User-friendly AI Interface (Supports Ollama, OpenAI API, ...) 项目地址: https://gitcode.com/GitHub_Trending/op/open-webui Open WebUI是一个功能强大的自托管A…...