FPGA时序分析与时序约束(四)——时序例外约束
目录
一、时序例外约束
1.1 为什么需要时序例外约束
1.2 时序例外约束分类
二、多周期约束
2.1 多周期约束语法
2.2 同频同相时钟的多周期约束
2.3 同频异相时钟的多周期约束
2.4 慢时钟域到快时钟域的多周期约束
2.5 快时钟域到慢时钟域的多周期约束
三、虚假路径约束
四、最大/最小延时约束
一、时序例外约束
1.1 为什么需要时序例外约束
在STA中时序分析工具默认的时序检查方式可能与实际情况不吻合,此时就需要额外增加一些约束命令,用于调整时序检查方式,添加的这些额外的时序约束称为时序例外约束。
如以下情况就可以通过时序例外约束改善系统时序:
- 某些逻辑的时序单元不是每个时钟周期都进行数据采样传输,可以使用多周期约束;
- 对时序路径施加更紧的约束以获得更大的时序余量,可以使用最大最小约束;
- 某些路径组合是静态的或并不需要进行时序约束,可以使用虚假路径忽略。
因此对一些可以放宽时序要求的路径添加时序例外约束,以减少对布局布线的占用、释放资源给时序要求高的路径,确保系统更好的收敛。
1.2 时序例外约束分类
时序例外约束主要包括多周期约束、虚假路径约束和最大最小延时约束。
| 命令 | 功能 |
| set_multicycle_path | 多周期约束,指定从起始时钟沿到目标时钟沿所需的时钟周期数。常用于放宽某些时序路径的时序要求,以指导设计工具实现更合理的布局布线资源分配。 |
| set_false_path | 虚假路径约束,指定在设计中不做分析的时序路径,即在布局布线中作为最低优先级的路径。 |
| set_max_delay set_min_delay | 最大延时约束和最小延时约束。该约束将会覆盖设计默认的(已约束或系统默认)用于建立和保持时间分析的最大或最小路径延时时间,即用延时时间对特定时序路径添加的约束。 |
二、多周期约束
2.1 多周期约束语法
默认情况下,时序工具以单周期为单位进行时序路径分析。多周期约束可以调整建立时间和保持时间检查的起始时钟沿到目标时钟沿所需的时钟周期数,多周期约束可以设置在单个路径上,多个路径上,甚至两个时钟之间,使用set_multicycle_path命令实现。
set_multicycle_path <path_multiplier> [-setup|-hold] [-start|-end] [-from <startpoints>] [-to <endpoints>] [-through <pins|cells|nets>]
- <path_multiplier> 用于设置修改约束路径分析的时钟周期数,取值必须是正整数。一般情况下setup/recovery分析是<path_multiplier>默认为1,hold/removal分析时<path_multiplier>默认为0,因此进行多周期约束就是改变<path_multiplier>默认参数;
- -setup和-hold用于指定约束命令所针对的是路径的建立时间分析(-setup)还是保持时间分析(-hold);
- -start和-end用于指定约束命令的<path_multiplier>参数是以源时钟(-start)还是以目标时钟(-end)作为参考时钟;
- -from指定约束路径的起始节点<startpoints>,可与to同时指定,若只指定form则表示覆盖所有从起始节点开始的路径;
- -to指定约束路径的终止节点<endpoints>,可与form同时指定,若只指定to则表示覆盖所有到终止节点结束的路径;
- -through指定约束路径所经过的节点<pins|cells|nets>,可选项。
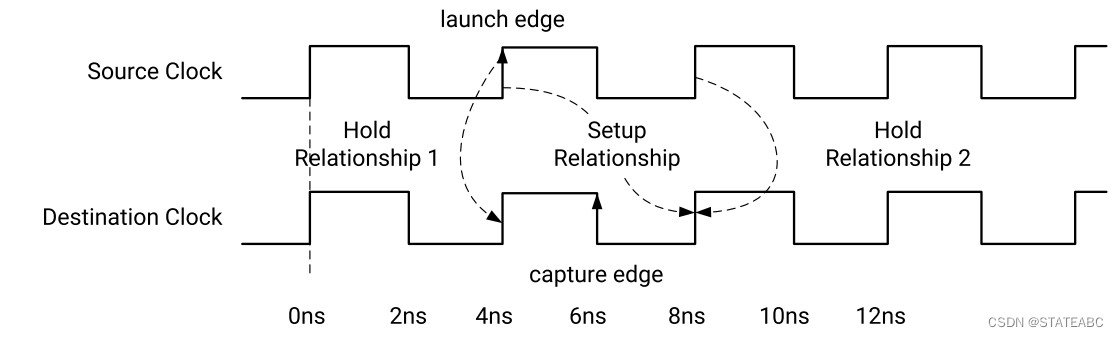
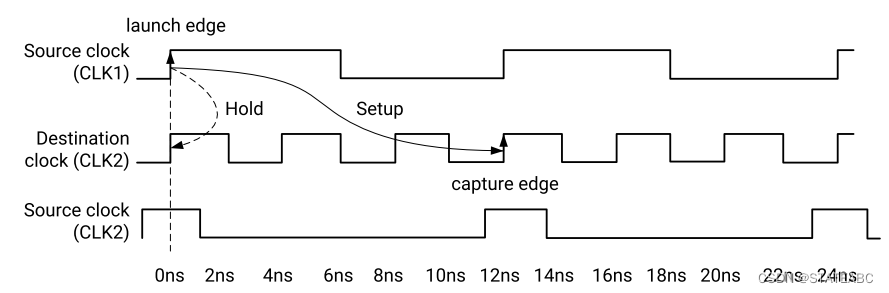
单周期约束就是按照单周期关系来分析数据路径,即数据的发起沿和捕获沿是最邻近的一对时钟沿,如下图所示。
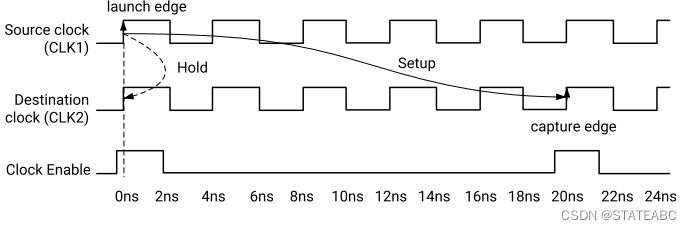
- 建立时间关系:以第一个发送沿为基准,再向后寻找距此发送沿最近的一个捕获沿,并将两者的setup定为1个周期;
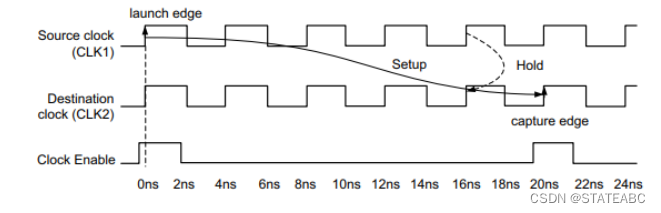
- 保持时间关系:确保当前发送沿推出的数据不被上一个捕获沿给捕获,即hold1(Source clock中的4ns发射的数据不能被Destination clock中的4ns处捕获);确保下一个发送沿推出的数据不被当前捕获沿给捕获,即hold2(Source clock中的8ns发射的数据不能被Destination clock中的8ns处为捕获)。
- 因此previous capture与current launch 构成一组检查;current capture与next launch 构成一组检查。对于两条保持时间的检查,时序报告最终只会给出裕量最小的一条。一旦确定建立时间路径,保持时间路径会自动根据规则做调整。
保持(hold)时间关与建立(setup)时间关系可通过如下公式进行换算:
保持时间时钟周期数=建立时间<path_multiplier>参数 —1 — 保持时间<path_multiplier>参数
由于建立时间的默认<path_multiplier>参数为1,保持时间的默认<path_multiplier>参数为0,则默认的保持时间的时钟周期数就是1-1-0=0.
总结 -end 和 -start 选项如何影响有效的启动和捕获边沿:
| 分析路径 | 源时钟(start) 时钟发射沿移动方向 | 目标时钟(end) 时钟发射沿移动方向 |
| 建立时间 | 向左移动 | 向右移动(默认) |
| 保持时间 | 向右移动(默认) | 向左移动 |
对于源时钟和目标时钟同频同相的时序路径分析,可以不指定-start和-end;对于非同频同相的源时钟和目标时钟,则需要指定-start和-end。set_multicycle_path命令的-setup选项不仅修改建立时间关系,也会影响保持时间关系。如果要将hold关系恢复到原来的位置,则需要使用-hold进行额外的设置。
2.2 同频同相时钟的多周期约束
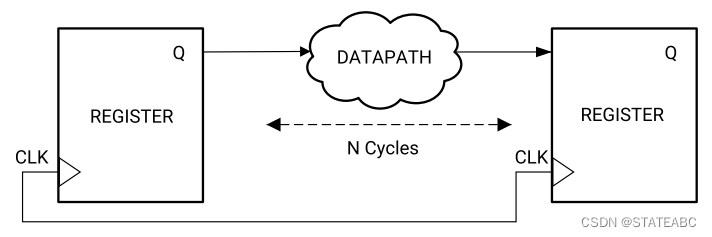
同频同相时希望第一个发送沿推出数据,经过N各周期才被被第二个寄存器的捕获沿给捕获。最常见的就是,时钟使能控制数据捕获的情形。
静态时序分析 (STA) 工具解析的默认建立和保持关系如下图

2.2.1 setup=2、hold相应移动
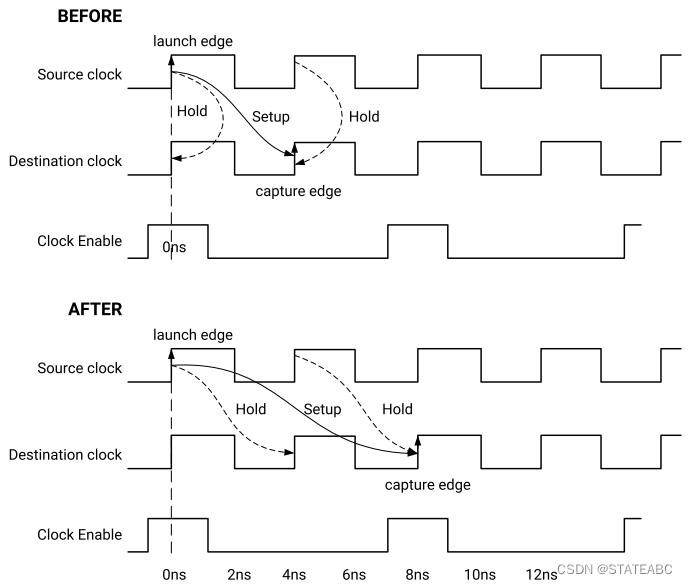
下图表明目标时钟的第一个边沿是无效的,只有目标时钟的第二个边沿将捕获一个新数据,即 将建立时间关系的时钟沿从默认的时钟发射沿后的第一个时钟周期,修改为时钟发射沿后的第二个时钟周期。
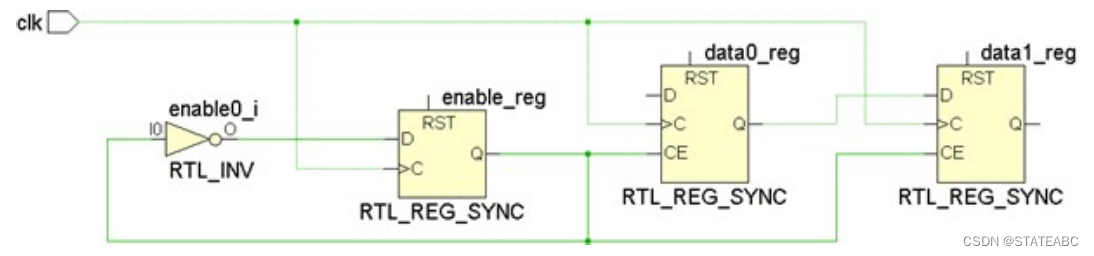
set_multicycle_path 2 -setup -from [get_pins data0_reg/C] -to [get_pins data1_reg/D]当修改建立时间关系时,保持时间关系也会随着发射沿和捕获沿的变化而修改。 将建立检查移至第二个捕获沿后,保持检查会自动移至第一个捕获沿(即建立检查之前的一个时钟周期)。
2.2.2 setup=2、hold=1
在上一个例子中进行多周期约束后保持时间的时钟启动沿和捕获沿为了满足一个时钟周期差的关系而随之调整,而实际上保持时间关系通常维持多周期约束前的默认状态即可。为了达到一个时钟周期差的保持时间要求可能会造成过约束,因此可以使用-hold值为1的多周期约束语句将保持时间的捕获时钟调整回默认状态。
set_multicycle_path 2 -setup -from [get_pins data0_reg/C] -to [get_pins data1_reg/D]
set_multicycle_path 1 -hold -from [get_pins data0_reg/C] -to [get_pins data1_reg/D]
2.2.3 setup=5、hold相应移动
将时钟使能信号每5个时钟周期拉高一次,即setup路径乘数被设置为5
set_multicycle_path 5 -setup -from [get_pins data0_reg/C] -to [get_pins data1_reg/D]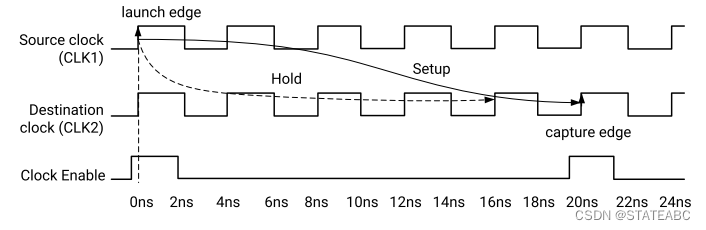
多周期约束后,建立时间的时钟沿从CLK1的第一个时钟周期调整到了第五个时钟周期,保存时间的锁存沿也从CLK2向右移动了4个时钟周期。
2.2.4 setup=5、hold=4
在setup=5、hold相应移动基础上调整保持时间的捕获沿回到默认的与时钟启动沿对齐的位置,同时使用使用-setup、-hold语句:
set_multicycle_path 5 -setup -from [get_pins data0_reg/C] -to [get_pins data1_reg/D]
set_multicycle_path 4 -hold -from [get_pins data0_reg/C] -to [get_pins data1_reg/D]
将hold的值设定为4,保持时间的启动沿和锁存沿又保持对其,由于时钟波形的对称性,这两条多周期约束最终所实现的保持时间关系也等效与下图波形。
因此对于启动时钟和捕获时钟为相同时钟或时钟波形相对固定的情况,如果想要多周期约束后保持时间关系仍然维持默认状态,-setup的多周期约束设定值为N, 则-hold的多周期约束设定值为N-1,即
set_multicycle_path N -setup -from [get_pins data0_reg/C] -to [get_pins data1_reg/D]
set_multicycle_path N-1 -hold -from [get_pins data0_reg/C] -to [get_pins data1_reg/D]
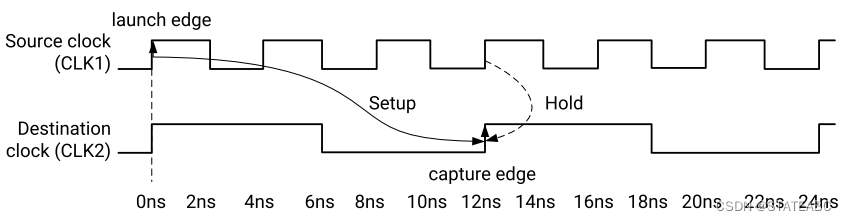
2.3 同频异相时钟的多周期约束
同频异相就是值时序分析中的源时钟和目标时钟的频率相同,但存在一定的相位差。
如上图,假设CLK1和CLK2相同频率,CLK2相对CLK1有一定的相移(0.3ns)。在以CLK1为源时钟,CLK2为目标时钟的时序路径分析中,默认情况下时序工具会寻找与CLK1相邻最近的CLK2时钟上升沿,并以CLK1与CLK2相对时间最短(时序要求最高,即最坏情况)的一组时钟沿的时序路径进行分析。
默认情况下时序工具解析的建立时间和保持时间关系如下图,保持时间-3.7ns,建立时间0.3ns。

建立时间无法达到时序收敛,保持时间过于宽松,因此需要进行多周期约束。
set_multicycle_path 2 -setup -from [get_clock CLK1] -to [get_clock CLK2]
2.4 慢时钟域到快时钟域的多周期约束
源时钟CLK1是慢时钟,目标时钟CLK2是快时钟。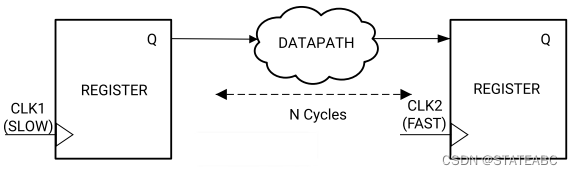
假设目标时钟CLK2是源时钟CLK1的三倍频,且目的寄存器对应的使能信号每隔3个时钟周期拉高一次,此时的时序约束过紧。

可以设置setup为3个时钟周期,这里的时钟周期移动是相对于目标时钟(快时钟),所以约束必须指定-end。
set_multicycle_path 3 -setup -end -from [get_clock CLK1] -to [get_clock CLK2]多周期约束后的建立时间关系的发射沿和保存时间关系的捕获沿都右移了两个时钟周期。
 而实际上保持时间的捕获沿并不需要右移两个时钟周期,这可能会倒是过约束,因此让保持时间的捕获沿退到默认的与时钟启动沿对其的位置。
而实际上保持时间的捕获沿并不需要右移两个时钟周期,这可能会倒是过约束,因此让保持时间的捕获沿退到默认的与时钟启动沿对其的位置。
set_multicycle_path 3 -setup -end -from [get_clocks CLK1] -to [get_clocks CLK2]
set_multicycle_path 2 -hold -end -from [get_clocks CLK1] -to [get_clocks CLK2]
综上,在慢时钟域到快时钟域且包含时钟使能的多周期约束中,若希望多周期约束后保持时间仍为默认状态,带-setup的多周期约束值设为N时,则带-hold的多周期约束值设为N-1。
set_multicycle_path N -setup -end -from [get_clocks CLK1] -to [get_clocks CLK2]
set_multicycle_path N-1 -hold -end -from [get_clocks CLK1] -to [get_clocks CLK2]
2.5 快时钟域到慢时钟域的多周期约束
源时钟CLK1是快时钟,目标时钟CLK2是慢时钟。

假设目标时钟CLK2是源时钟CLK1的三倍频,且目的寄存器对应的使能信号每隔3个时钟周期拉高一次,此时的时序约束过紧。 
进行多周期约束,由于时钟周期移动所针对的是源时钟,因此使用-start选项。
set_multicycle_path 3 -setup -start -from [get_clocks CLK1] -to [get_clocks CLK2]
set_multicycle_path 2 -hold -from [get_clocks CLK1] -to [get_clocks CLK2]
 综上,在快时钟域到慢时钟域的多周期约束中,若希望多周期约束后保持时间仍为默认状态,带-setup的多周期约束值设为N时,则带-hold的多周期约束值设为N-1。
综上,在快时钟域到慢时钟域的多周期约束中,若希望多周期约束后保持时间仍为默认状态,带-setup的多周期约束值设为N时,则带-hold的多周期约束值设为N-1。
set_multicycle_path N -setup -start -from [get_clocks CLK1] -to [get_clocks CLK2]
set_multicycle_path N-1 -hold -from [get_clocks CLK1] -to [get_clocks CLK2]
无论是使用-setup -start还是-setup -end进行约束,都是<path_mutiplier>参数值越大,建立时间关系的时钟启动沿和捕获沿的距离相隔就越远(时序要求更松); <path_mutiplier>参数值越小,建立时间关系的时钟启动沿和捕获沿的距离相隔就越近(时序要求更紧); 使用-hold -start还是-hold -end进行约束与此类似。
三、虚假路径约束
虚假路径指该路径是非功能路径或没有任何时序要求的路径。
虚假路径约束后,时序工具将不再为被约束路径做时序分析;而多周期约束后,时序工具仍会在放宽时序要求的前提下进行时序努力和分析。
虚假路径约束的语法为:
set_false_path [-setup] [-hold] [-from <startpoints>] [-to <endpoints>] [-through <pins|cells|nets>]
- -setup和-hold用于指定约束命令所针对的是路径的建立时间分析还是保持时间分析;
- -from指定约束路径的起始节点<startpoints>,可与to同时指定,若只指定form、to、through的一个则表示覆盖所有经过指定节点的路径都为虚假路径;
- -to指定约束路径的终止节点<endpoints>;
- through指定约束路径所经过的节点<pins|cells|nets>,可选项,可同时使用多个through但有先后顺序。
常见的虚假路径包括:
- 已经做过同步处理的跨时钟域路径;
- 上电后只做一次初始化写入的寄存器路径;
- 复位或测试逻辑的路径;
- 实际不存在的时序路径 。
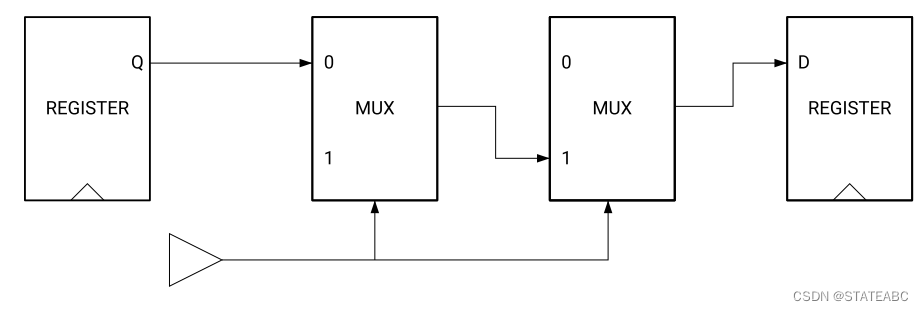
下图为非功能路径,由于两个多路复用器均由相同的选择信号驱动,因此从Q到D的路径不存在,应定义为错误路径。
将覆盖到所有以reset信号起始的路径约束为虚假路径:
set_false_path -from [get_port reset] -to [all_registers]
将两个异步时钟域之间的时序路径约束为虚假路径:
set_false_path -from [get_clocks CLKA] -to [get_clocks CLKB]这个约束仅覆盖从CLKA到CLKB的所有时序路径,但不包含CLKB到CLKA的时序路径,要包含所有的时序路径需要在两个时钟方向都进行约束:
set_false_path -from [get_clocks CLKA] -to [get_clocks CLKB]
set_false_path -from [get_clocks CLKB] -to [get_clocks CLKA]这种情况个更适合用set_clock_groups约束对两个或多个互斥时钟进行约束,以忽略它们之间的时序路径:
set_clock_groups -group CLKA -group -CLKB四、最大/最小延时约束
最大延时约束将覆盖默认的建立时间分析的最大路径延时值;最小延时约束将覆盖默认的保持时间分析的最小路径延时值。
最大延时约束和最小延时约束通常不建议用于约束输入或输出引脚与内部寄存器之间(pin2reg、reg2pin)的路径延时,而对于一些异步信号之间的路径,可以使用最大延时约束和最小延时约束。
最大延时约束和最小延时约束命令如下:
set_max_delay <delay> [-datapath_only] [-from <startpoints>] [-to <endpoints>] [-through <pins|cells|nets>]
set_min_delay <delay> [-from <startpoints>] [-to <endpoints>] [-through <pins|cells|nets>]
- -from指定约束路径的起始节点<startpoints>
- -to指定约束路径的终止节点<endpoints>
- -through指定约束路径所经过的节点<pins|cells|nets>
默认情况下,时序裕量的计算包含时钟偏斜(Clock Skew)。如果不希望包含时钟偏斜,可以使用-datapath_only选项将其移除。只有set_max_delay命令支持-datapath_only选项,并且需要-from选项。
带或不带 -datapath_only选项 的 set_max_delay 的路径延迟计算的常见行为:
- 当路径在输入端口上启动并且在端口上指定了set_input_delay时,输入延迟将包含在路径延迟计算中;
- 当路径在输出端口上结束并且在端口上指定了set_output_delay时,输出延迟包括在路径延迟计算中;
- 当路径结束于时序单元的数据引脚上时,该数据引脚setup时间包括在该路径延迟计算中。
参考文献:
《FPGA时序约束与分析》
《正点原子FPGA静态时序分析与时序约束》
《Intel Quartus Prime Standard Edition用户指南: Timing Analyzer》
《Vivado Design Suite User Guide: Using Constraints(UG903)》
《Vivado Design Suite 用户指南: 设计分析与收敛技巧 (UG906)》
相关文章:
FPGA时序分析与时序约束(四)——时序例外约束
目录 一、时序例外约束 1.1 为什么需要时序例外约束 1.2 时序例外约束分类 二、多周期约束 2.1 多周期约束语法 2.2 同频同相时钟的多周期约束 2.3 同频异相时钟的多周期约束 2.4 慢时钟域到快时钟域的多周期约束 2.5 快时钟域到慢时钟域的多周期约束 三、虚假路径约…...

无需任何三方库,在 Next.js 项目在线预览 PDF 文件
前言: 之前在使用Vue和其它框架的时候,预览 PDF 都是使用的 PDFObject 这个库,步骤是:下载依赖,然后手动封装一个 PDF 预览组件,这个组件接收本地或在线的pdf地址,然后在页面中使用组件的车时候…...

排序问题——晴问题库
排序问题——晴问题库 排序问题是线性数据的常考问题,在解晴问题库时总结归纳以下关于排序的解题方法和思路。 感谢晴神 排序问题是数据结构中十分重点的一部分。 可以分为五个大部分: 插入排序选择排序交换排序基数归并 再具体往下分: 插…...
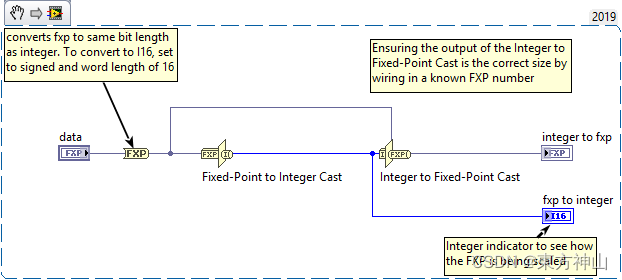
【LabVIEW FPGA入门】FPGA中的数学运算
数值控件选板上的大部分数学函数都支持整数或定点数据类型,但是需要请注意,避免使用乘法、除法、倒数、平方根等函数,此类函数比较占用FPGA资源,且如果使用的是定点数据或单精度浮点数据仅适用于FPGA终端。 1.整数运算 支持的数…...
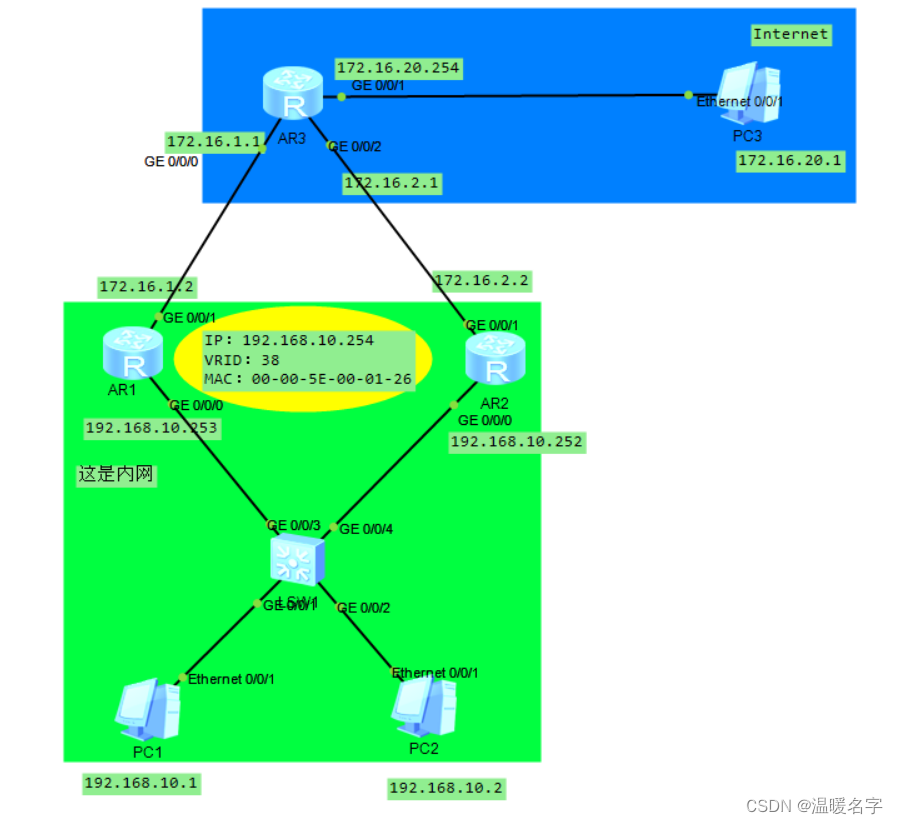
华为设备VRRP配置
核心代码: 需要对所有虚拟路由器设置(要进入到对应的端口) vrrp vrid 38 virtual-ip 192.168.10.254 vrrp vrid 38 priority 120 vrrp vrid 38 track int g0/0/1 reduced 30①mac由vrid生成 ②指定虚拟ip ③虚拟ip作为内部主机的网关&#x…...
2024年艺术发展与文化产业国际会议(ICADCI 2024)
2024年艺术发展与文化产业国际会议(ICADCI 2024) 2024 International Conference on Art Development and Cultural Industry(ICADCI 2024) 数据库:EI,CPCI,CNKI,Google Scholar等 一、【会议简介】 2024年艺术发展与文化产业国际会议(ICADCI 2024)将于丽江这座美丽…...
获取心率_java 华为手表获取心跳)
华为手表开发:WATCH 3 Pro(10)获取心率_java 华为手表获取心跳
华为手表开发:WATCH 3 Pro(10)获取心率_java 华为手表获取心跳 Excerpt 文章浏览阅读1.2k次。鸿蒙开发,获取手表心跳,按钮点击后触发的方法,我们将跳转页面的代码写在这个位置就可以实现点击按钮进行跳转页面的动作。在HTML文件“index.hml”,添加按钮,这里按钮用到是标…...

使用企业订货软件的担忧与考虑|网上APP订货系统
使用企业订货软件的担忧与考虑|网上APP订货系统 网上订货系统担心出现的问题 1,如果在订货系统中定错(多)货物了该怎么办 其实这也是很多人在网购或者是现实中经常会犯的一个错误,但是网上订货平台为大家提供了很多的解决方案,其中对于订单的…...

Java-集合-Collection类
1 需求 2 接口 Interface Collection<E> public interface Collection<E> extends Iterable<E> 2.3 Method Detail int size()boolean isEmpty()boolean contains(Object o)Iterator<E> iterator()Object[] toArray()<T> T[] toArray(T[] a)…...
Linux:/proc/kmsg 与 /proc/sys/kernel/printk_xxx
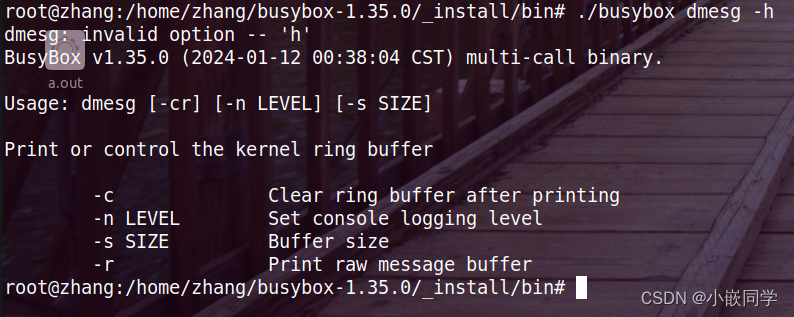
目录 前言一、/proc/kmsg1、简介2、如何修改内核日志缓冲区3、dmesgklogctl 函数(来源于 man 手册) 4、扩展阅读 二、 /proc/sys/kernel/printk_xxx三、/dev/kmsg 前言 本篇文章将为大家介绍与 Linux 内核日志相关的一些控制文件,共同学习&am…...

使用 Postman 发送 get 请求的简易教程
在API开发与测试的场景中,Postman 是一种普遍应用的工具,它极大地简化了发送和接收HTTP请求的流程。要发出GET请求,用户只需设定正确的参数并点击发送即可。 如何使用 Postman 发送一个GET请求 创建一个新请求并将类型设为 GET 首先&#…...
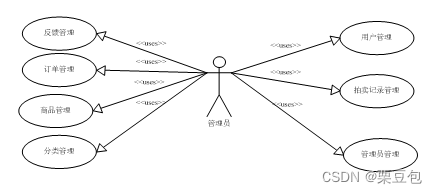
【网站项目】基于jsp的拍卖网站设计与实现
🙊作者简介:多年一线开发工作经验,分享技术代码帮助学生学习,独立完成自己的项目或者毕业设计。 代码可以私聊博主获取。🌹赠送计算机毕业设计600个选题excel文件,帮助大学选题。赠送开题报告模板ÿ…...

为什么洗衣机会每天自动上传3.6GB数据?
“为什么我家的LG洗衣机每天都会上传3.6GB的数据?” 一位名为Johnie用户发现他家电设备的异常行为后表示很不理解,随后他把相关信息发布在X平台,很快这篇帖子就收获了超过1700万次的浏览量,并迅速变成一场争议和网络安全battle。…...

word写标书的疑难杂症总结
最近在解决方案工作,与office工具经常打交道,各种问题,在此最下记录: 1.word中文档距离文档顶端有距离调整不了 1.疑难杂症问题1,多个空格都是不能解决 #解决办法:word中--布局-下拉框---“版式”--“垂直…...

2024,会更好嘛?
2023转眼过去,从1月的前端,2月的java,3月的数据库,4月的运维,我尝试了许多技术方向,终究在2023年5月,凭着背的Java面试题,拿到了三四个offer。2023年6月,边玩边整自己的毕…...

Nsis打包Unity Exe文件(通用)
Nsi 脚本 !include "MUI2.nsh"#使用现代UI Unicode true #使用Unicode !define EXENAME "exeName" #定义常量 exe名称 !define SHORTCUT "快捷方式名称" #定义桌面快捷方式的中文名称Name ${EXENAME} #安装程序的title OutFile "${EXENAME…...
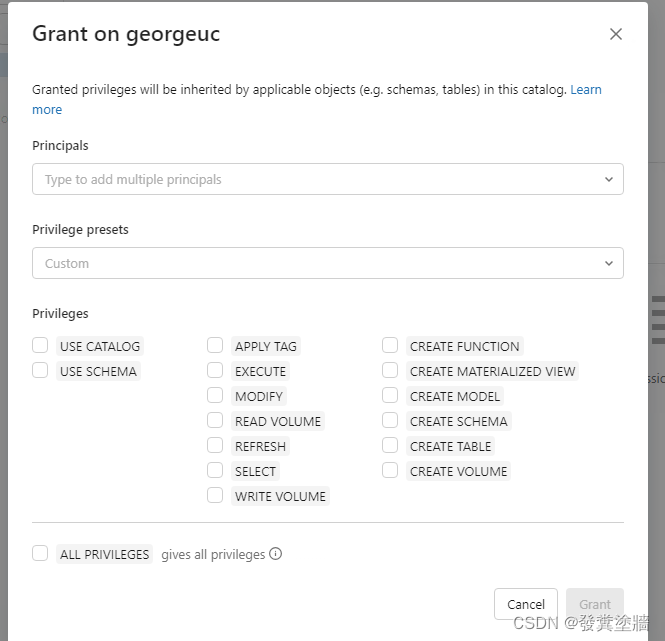
【Azure 架构师学习笔记】- Azure Databricks (6) - 配置Unity Catalog
本文属于【Azure 架构师学习笔记】系列。 本文属于【Azure Databricks】系列。 接上文 【Azure 架构师学习笔记】- Azure Databricks (5) - Unity Catalog 简介 UC的关键特性 之所以DataBricks要用UC, 很大程度是对安全的管控。从上文可以了解到它的四大特性&#…...
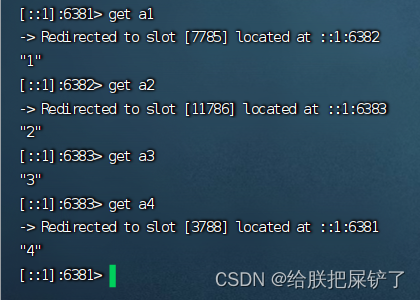
redis7部署集群:包含主从模式、哨兵模式、Cluster集群模式等三种模式
前言: redis部署集群常见的一般有三种模式:主从模式,Sentinel(哨兵模式),Redis Cluster(高可用Cluster集群),根据不同的需求可自定义选择部署方式。 Redis 主从模式&…...

072:vue+mapbox 点击某图层feature,高亮这部分
第072个 点击查看专栏目录 本示例是介绍如何在vue+mapbox中点击某图层feature,高亮这部分。思路是通过点击,获取点击部分的feature信息,生成一个新的source和layer,如果这个图层不为空,则清除之,相当于点击了别的地方,原有的高亮会删除掉,在别的地方高亮。 直接复制下…...

2024年最新安全且稳定的大数据传输方式
随着大数据时代的兴起,数据传输的速度和效率已经成为企业竞争的关键因素。到了2024年,大数据传输领域迎来了新的趋势和挑战,同时也涌现出了一系列创新的解决方案。本文将深入探讨这些新趋势和解决方案,意在帮助企业更好地迎接大数…...

Chrome密码恢复终极指南:如何安全找回所有浏览器保存的密码
Chrome密码恢复终极指南:如何安全找回所有浏览器保存的密码 【免费下载链接】chromepass Get all passwords stored by Chrome on WINDOWS. 项目地址: https://gitcode.com/gh_mirrors/chr/chromepass 你是否曾经因为忘记某个重要网站的密码而焦虑࿱…...
)
仅限本周开放|Lovable高阶工程化实践内部培训课件(含模块化架构图、依赖注入容器源码注释版)
更多请点击: https://codechina.net 第一章:Lovable应用开发完整教程 Lovable 是一个面向现代 Web 应用的轻量级响应式框架,专为构建高交互性、可访问性强且易于维护的单页应用(SPA)而设计。它采用声明式组件模型与响…...

UWB传统厘米级定位 VS 镜像视界AI无感定位|大模型融合视频孪生全面重塑全域空间感知
UWB传统厘米级定位 VS 镜像视界AI无感定位|大模型融合视频孪生全面重塑全域空间感知在全域空间高精度感知产业高速迭代进程中,室内外人员与目标定位技术逐步分化为两大主流发展路径,其一为深耕多年、依托硬件组网实现测距定位的传统UWB厘米级…...

掌握3大核心架构:LiveSplit如何为速度跑者提供毫秒级精准计时
掌握3大核心架构:LiveSplit如何为速度跑者提供毫秒级精准计时 【免费下载链接】LiveSplit A sleek, highly customizable timer for speedrunners. 项目地址: https://gitcode.com/gh_mirrors/li/LiveSplit 如果你是一名速度跑者,面对复杂的游戏计…...

终于有人说清楚经营分析会怎么开了!一篇看懂经营分析会全流程
各位老板有没有想过,为什么你的经营分析会越开越多?有的企业月月开、周周开,甚至恨不得天天开。会一多,人就麻木了,翻来覆去讲同样的数据、追同样的问题,真正该花时间去解决的业务卡点,反而没人…...

通过Taotoken聚合调用,在不同时段测试模型响应速度的观察
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过Taotoken聚合调用,在不同时段测试模型响应速度的观察 在构建依赖大模型能力的应用时,响应速度是一个直…...

别再瞎找了!2026年不容错过的专业AI论文软件
2026年AI论文写作工具已从“基础生成”升级为智能协同研究系统,核心评价维度包括文献真实性、格式合规性、长文本逻辑、查重降重、AIGC合规与多语言支持。本次测评覆盖6款主流工具,涵盖中文与英文场景、全流程与专项功能、免费与付费版本,让你…...

如何快速掌握智能电源管理:macOS用户的完整配置指南
如何快速掌握智能电源管理:macOS用户的完整配置指南 【免费下载链接】SleeperX MacBook prevent idle/lid sleep! Hackintosh sleep on low battery capacity. 项目地址: https://gitcode.com/gh_mirrors/sl/SleeperX SleeperX是一款专为macOS用户设计的开源…...

大模型 API 中转站工程选型:token5u 接入与压测清单
工程项目里选 API 中转站,不能只看“能不能调通”。能调通只是第一步,后面还有协议兼容、模型路由、超时重试、流式输出、账单归因、Key 管理、企业结算和故障切换。本文按工程视角拆:行业风险、选型指标、推荐顺序、接入示例和上线前压测清单…...
)
自动化测试常用函数(操作测试对象)
上一篇我们学会了怎么用Selenium定位页面元素,接下来就是要对元素进⾏操作了。常⻅的操作有点击、提交、输⼊、清除、获取⽂本。点击:元素.click()输入:元素.send_keys("内容")清空:元素.clear()拿标签间文字:元素.text…...