【轮式平衡机器人】——角度/速度/方向控制分析软件控制框架
轮式平衡机器人具有自不稳定性,可类比一级倒立摆系统的控制方法,常见有反馈线性化方法、非线性PID控制、自适应控制、自抗扰控制,还有改进的传统缺乏对外界干扰和参数改变鲁棒性的滑模变结构控制。我们采用较为简单的双闭环PID控制实现平衡模型。
一、角度平衡控制(PD内环)


由上面的系统传递函数可知,该系统一共2个极点,但根据奈奎斯特判据,其中一个极点位于s平面的右半面会引起系统的不稳定性,可加入反馈环节消除这种不稳定,能有效避免闭环过程中参数波动产生的扰乱系统的效果,且减小系统时间常数和非线性的影响。
反馈控制器可以是PI,可以是PD,也可以是PID,考虑到角度控制环节的角度信息由陀螺仪MPU6050采集,采集时有信号噪声和零点漂移,为了防止这些误差被积分环节放大,所以采用PD控制。
比例P:k1
微分D:k2*s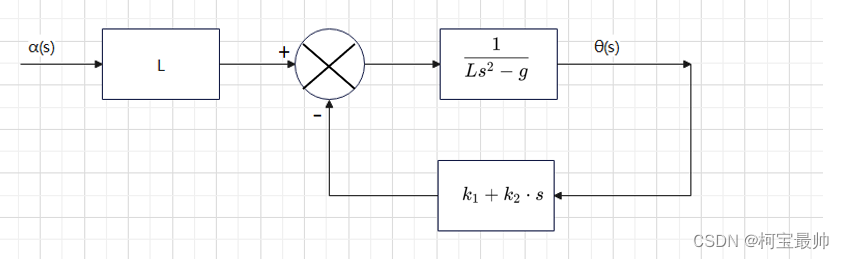
再次分析得到2个极点(不赘述),当k1>g,k2>0时,满足两个极点位于s平面左半面的稳定条件。
在整个角度环路中,k1和k2的阶分别代表了角度(θ)与角速度(θ的微分),所以控制平衡的控制量x由角度和角速度计算而来。——这样来理解,首先因为产生倾角θ所以产生控制量,前倾的时候车轮也要向前运动,后倾则车轮要向后,所以认为电动机的控制量x与θ之间存在x=k1*θ比例关系,但是当角度θ为0时,x也为0,实际会存在惯性小车不平衡,所以引入一个与角速度(即θ的微分)相关的阻尼力来平衡,则x=k1*θ+k2*dθ/dt。
角度与角速度的反馈主要由MPU6050传感器获得!
二、速度控制器(PI外环)
在完成上面平衡的前提下做速度控制实际上十分复杂——改变速度的同时不能影响基本的平衡控制,所以不能将速度的控制效果直接加到电动机速度的改变中。
为了简化控制量与控制结果之间的关系,可将速度控制看作平衡控制(与角度相关)的外环控制,即将直立平衡控制的目标看作速度控制的结果。因为倾角决定了速度(向前倾的程度与机器人在该方向上运动速度正相关),且由于倾角的存在导致平衡控制的偏差存在,因此需要加速去消除倾角的存在,从而维持平衡:
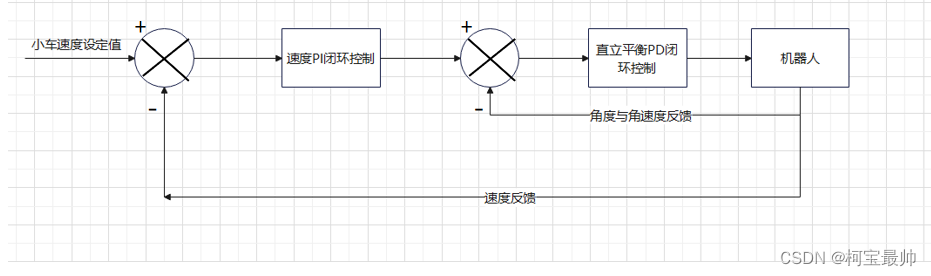
速度反馈主要利用编码器信号eQEP功能模块读取实现,原来直立平衡控制的输入量变为速度控制的输出量,形成串级控制系统。内环使用PD控制,这里为了消除静态误差,外环速度控制采用PI控制。

三、方向控制器(P辅助)
轮式平衡机器人具有两轮同轴的机械特性,方向控制主要来自两轮的差速,转向控制建立在前两个控制的基础上,不能影响正常的直立平衡。平衡小车对转向控制的精度和响应速度要求不高,只采用比例控制P。
可以使用z轴陀螺仪的角速度数据与设定目标转向角速度做偏差来计算控制量进行P控制,避免了通过车轮编码器信号来判断转向时无法考虑打滑等因素的缺点、陀螺仪数据用于计算转向角时可能产生的误差累积,优点是算法简单,但也存在对高频信号采样失真的缺点。
四、控制框架
下面从整体概貌上谈谈轮式平衡小车的目标效果,考虑了CD摄像头循迹、APP控制、超声波避障等拓展功能。
①系统初始化

②串口中断程序
设计串口中断程序可以实现下列拓展功能:
③主中断程序

主程序的运行需要精确的时钟周期来保证平衡控制的稳定运行,如使用单片机的定时器Timer0实现5ms为周期的陀螺仪信号读取、编码器信号读取、PWM控制量计算、启停信号的检测以及CCD相机信号的读取、中值线计算的过程。
app蓝牙串口发送来的控制信号通过串口中断接收,在速度控制量计算时介入;定速自主循迹通过图像采集模块得到的电压值进行中线识别,根据转向控制量计算出两轮的电机差速PWM控制量。
往期精彩
STM32专栏(付费9.9)![]() http://t.csdnimg.cn/E2F88
http://t.csdnimg.cn/E2F88
OpenCV-Python专栏(付费9.9)![]() http://t.csdnimg.cn/zK1jV
http://t.csdnimg.cn/zK1jV
AI底层逻辑专栏(付费9.9)![]() http://t.csdnimg.cn/zic0f
http://t.csdnimg.cn/zic0f
机器学习专栏(免费)![]() http://t.csdnimg.cn/FaXzAFreeRTOS专栏(免费)
http://t.csdnimg.cn/FaXzAFreeRTOS专栏(免费)![]() http://t.csdnimg.cn/SjIqU电机控制专栏(免费)
http://t.csdnimg.cn/SjIqU电机控制专栏(免费)![]() http://t.csdnimg.cn/FNWM7
http://t.csdnimg.cn/FNWM7
AI拓展驿站
人工智能(AI)>机器学习>深度学习!机器学习可做传统预测、图像识别、自然语言处理等。
机器学习(统计方法)是实现人工智能的一种途径,深度学习(深度神经网络)是机器学习中的一种方法!
机器学习三个关键词:数据、模型、预测!
数据集结构:特征值(特征)+目标值(标签)!
机器学习分类:①监督学习:输入数据有特征有标签,若标签为类别则为分类问题,若标签为连续型数据则为回归问题。②无监督学习:输入数据有特征但无标签(即无特定目标值),典型的聚类问题。

自学路线:B站视频入门——实战类书籍——理论型书籍(数学基础、李航的统计学习方法、机器学习“西瓜书”、深度学习““花书”)
学习库和框架:B站视频先scikit-learn再tensorflow!
相关文章:
【轮式平衡机器人】——角度/速度/方向控制分析软件控制框架
轮式平衡机器人具有自不稳定性,可类比一级倒立摆系统的控制方法,常见有反馈线性化方法、非线性PID控制、自适应控制、自抗扰控制,还有改进的传统缺乏对外界干扰和参数改变鲁棒性的滑模变结构控制。我们采用较为简单的双闭环PID控制实现平衡模…...
HYBBS 表白墙网站PHP程序源码 可封装成APP
源码介绍 PHP表白墙网站源码,可以做校园内的,也可以做校区间的,可封装成APP。告别QQ空间的表白墙吧。 安装PHP5.6以上随意 上传程序安装,然后设置账号密码,登陆后台切换模板手机PC都要换开启插件访问前台。 安装完…...
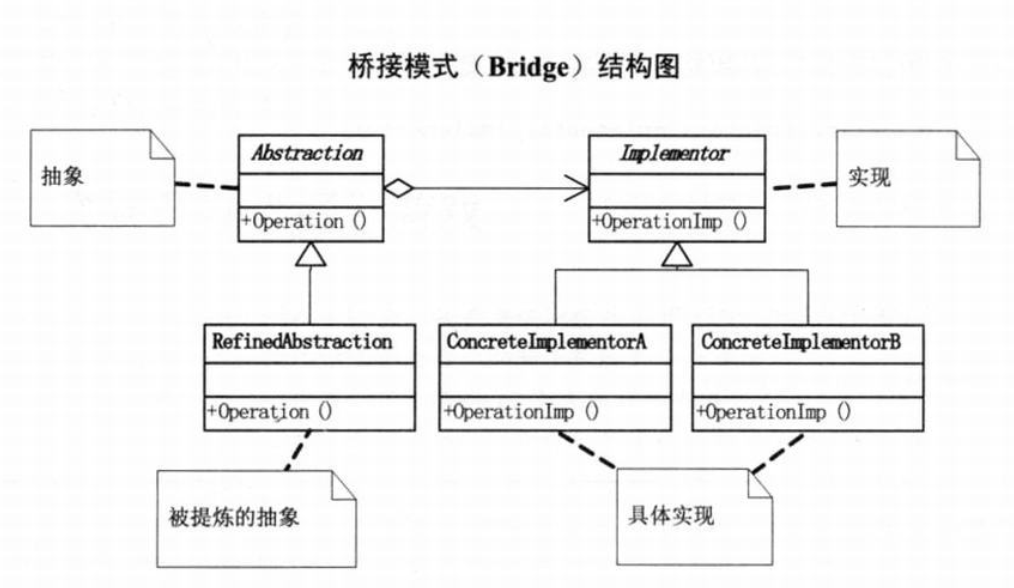
【设计模式】适配器和桥接器模式有什么区别?
今天我探讨一下适配器模式和桥接模式,这两种模式往往容易被混淆,我们希望通过比较他们的区别和联系,能够让大家有更清晰的认识。 适配器模式:连接不兼容接口 当你有一个类的接口不兼容你的系统,而你又不希望修改这个…...

C语言应用层程序热补丁
一、热补丁简介 一个正在运行的程序,要是有某函数或某流程有问题,需要修改,有两个方式: 1.通过设置LD_PRELOAD把需要的库重新定向,但这种方式需要重启正在运行的程序。 2.通过修改可执行文件某个函数指向的地址&…...
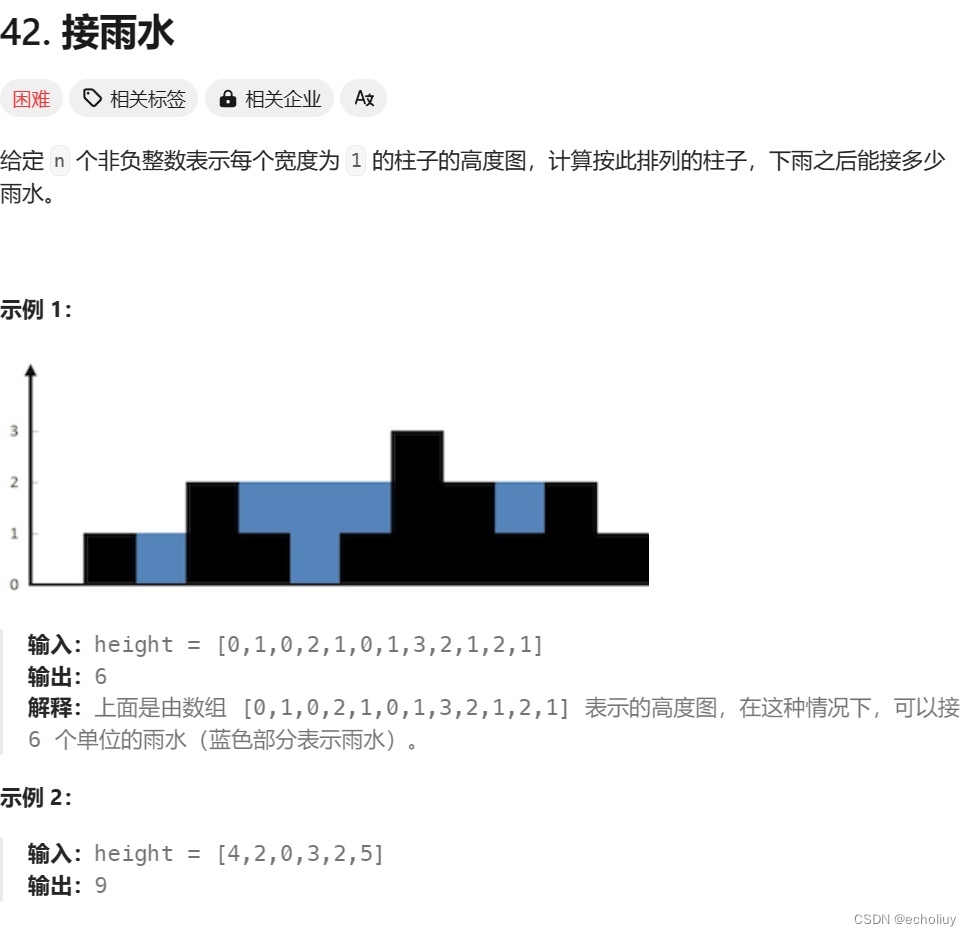
【代码随想录+力扣hot100】双指针
文章目录 27. 移除元素思路:代码: 26. 删除有序数组中的重复项代码:思路一:重复元素必相邻思路二:从第一个位置开始考虑快慢指针 977.有序数组的平方思路:代码: 283. 移动零代码:思路…...
【Java程序员面试专栏 专业技能篇】MySQL核心面试指引(三):性能优化策略
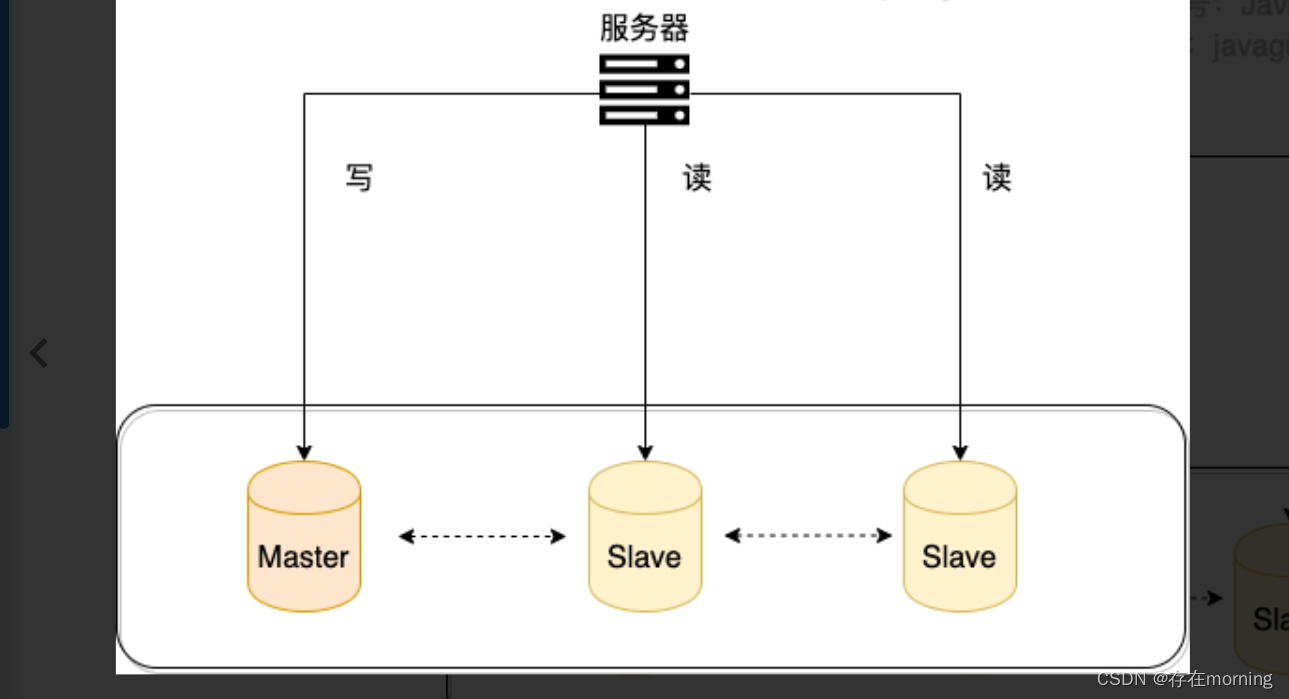
关于MySQL部分的核心知识进行一网打尽,包括三部分:基础知识考察、核心机制策略、性能优化策略,通过一篇文章串联面试重点,并且帮助加强日常基础知识的理解,全局思维导图如下所示 本篇Blog为第三部分:性能优化策略,子节点表示追问或同级提问 读写分离 分布式数据库的…...
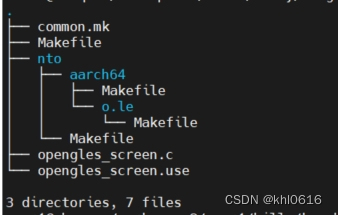
qnx 上screen + egl + opengles 最简实例
文章目录 前言一、qnx 上的窗口系统——screen二、screen + egl + opengles 最简实例1.使用 addvariant 命令创建工程目录2. 添加源码文件3. common.mk 文件4. 编译与执行总结参考资料前言 本文主要介绍如何在QNX 系统上使用egl和opengles 控制GPU渲染一个三角形并显示到屏幕上…...

python基础学习-02
基本的程序设计模式 任何的程序设计都包含IPO,它们分别代表如下: I:Input 输入,程序的输入 P:Process 处理,程序的主要逻辑过程 O:Output 输出,程序的输出 因此如果想要通过计算…...

服务调用Ribbon,LoadBalance,Feign
服务调用Ribbon、Fegin Ribbon实现负载均衡的原理 1:LoadBalancerAutoConfiguration这个类,这个类主要做的就是把LoadBalancer拦截器封装到RestTemplte拦截器集合里面去。 2:然后在代码里面调用restTemplate.getForObject或者其他方法的时候&…...
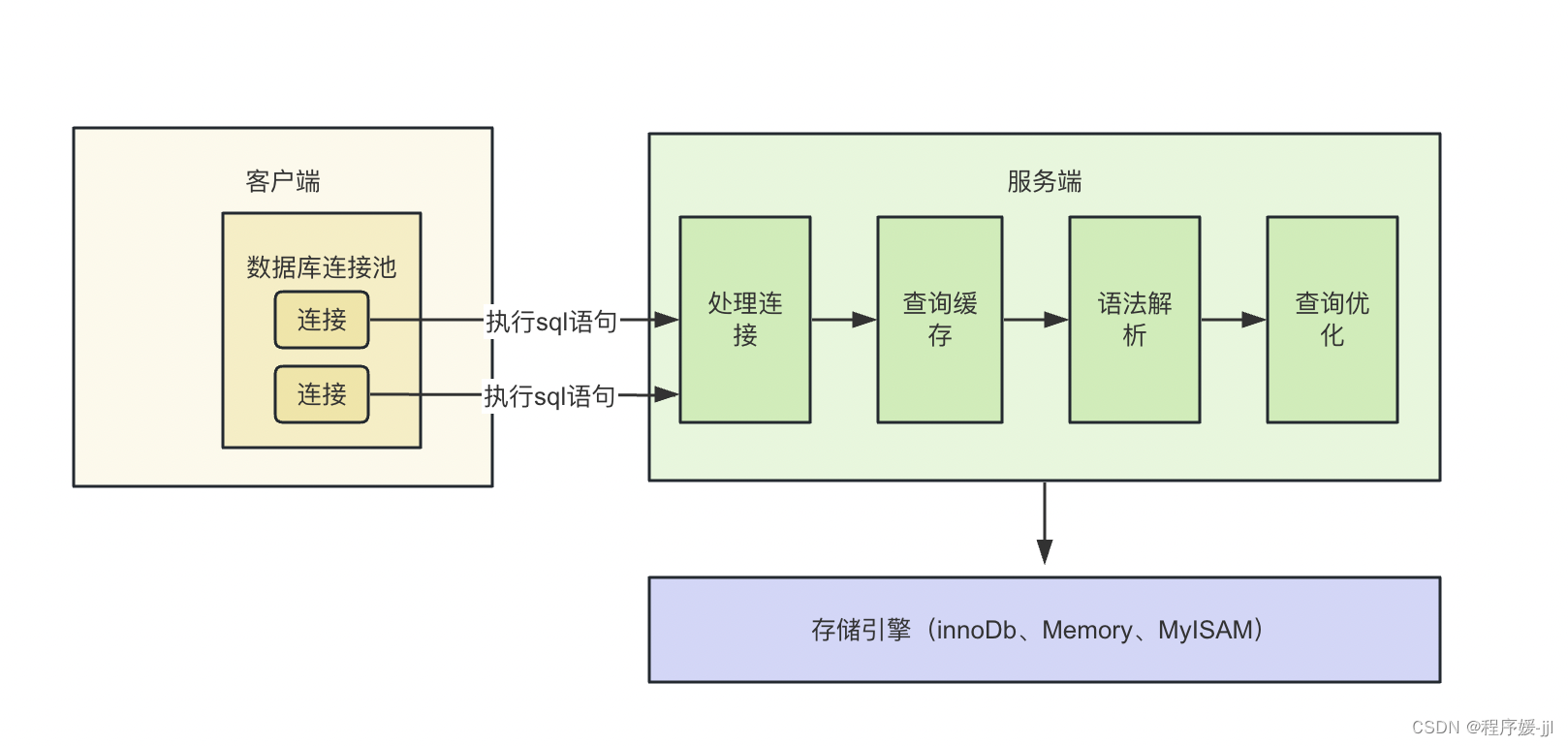
一条sql是如何运行的
在我们平时使用sql的时候,基本是基于黑盒的使用方式,在客户端输入一条sql语句,然后回显想要的数据,对于mysql server端内部如何运行的以及与存储引擎如何交互的不得而知。 通过下面一幅图,大致描述客户端和服务端交互…...
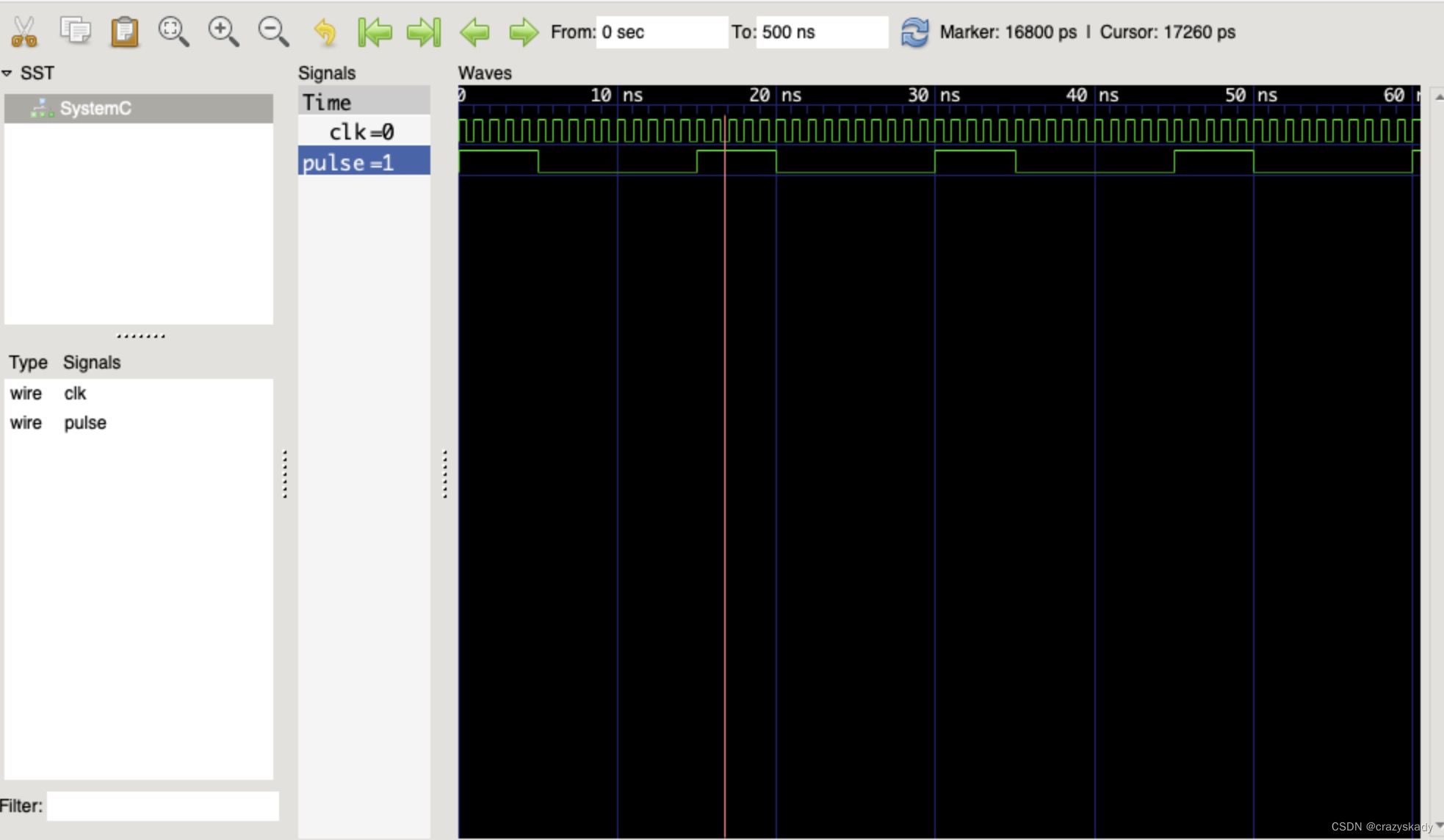
SystemC学习笔记(三) - 查看模块的波形
简述 波形在Simulation/Emulation中地位十分重要,尤其是在研发初期,只能通过波形来查看软件hang住的位置。 对于TLM来说,查看波形一般是指查看pvbus上的transaction,而对于SystemC本身来说,查看波形就是使用Gtkwave或…...
复习提纲5)
计算机网络(第六版)复习提纲5
SS2.2 有关信道的几个基本概念 2.通信模型 三个主要部分:信源、信道、信宿 3.通信方式: a)术语:消息(传递的内容)、数据(传递的形式)、信号(数据表现形式,有模拟信号和数字信号两种&…...
JavaScript 学习笔记(WEB APIs Day3)
「写在前面」 本文为 b 站黑马程序员 pink 老师 JavaScript 教程的学习笔记。本着自己学习、分享他人的态度,分享学习笔记,希望能对大家有所帮助。推荐先按顺序阅读往期内容: 1. JavaScript 学习笔记(Day1) 2. JavaSc…...

Springboot自动装配:三个注解、Selector、spring.factories文件、@ConditionalOnProperty注解
借鉴: 这个链接是包含run方法进来debug看整个过程的,建议先看:https://www.cnblogs.com/starsray/p/15580915.html https://blog.csdn.net/fengxiandada/article/details/130080828 Springboot自动装配 1.创建springboot应用 如何创建一个s…...
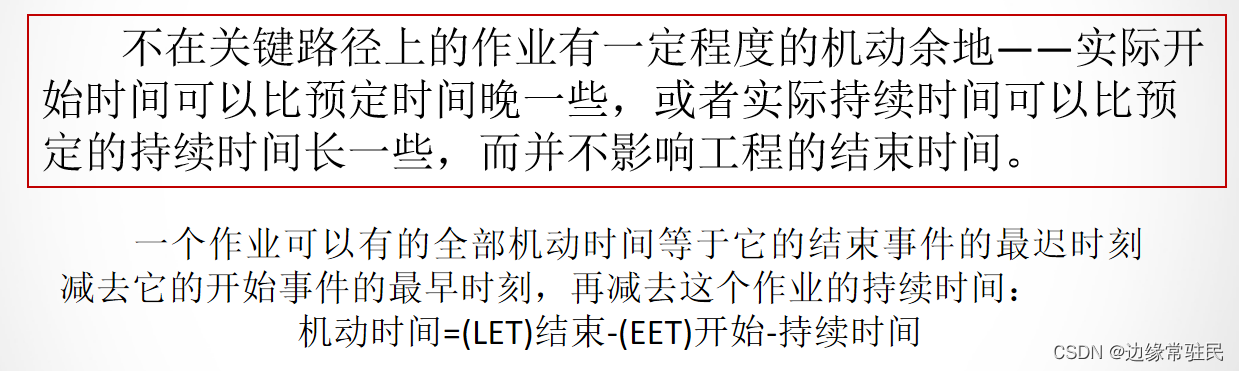
软件工程应用题汇总
绘制数据流图(L0/L1/L2) DFD/L0(基本系统模型) 只包含源点终点和一个处理(XXX系统) DFD/L1(功能级数据流图)在L0基础上进一步划分处理(XXX系统) 个人理解 DFD/L2(在L1基础上进一步分解后的数据流图) 数据…...

P1789 【Mc生存】插火把(C语言)
首先,我们可以先用数组来储存地图(建议用int,我试过bool会RE) 每次读入火把和萤石的坐标 接着把能照亮的地方标记起来 最后用计数器统计会生成怪的地方有钻石的话还怕怪吗 最后,上代码 #include<stdio.h> i…...
复习提纲6)
计算机网络(第六版)复习提纲6
SS2.3 导引型传输媒体 1.三类位非导引型传输媒体 a)双绞线:两根铜线平行会相互干扰,垂直干扰最小,双绞线近似垂直,绞合度越高,可用的数据传输率越高。 i.无屏蔽双绞线UTP(便宜) ii.屏蔽双绞线&a…...

安卓平板局域网内远程控制工控机方法
安卓平板局域网内远程控制工控机方法 将所需要远程控制的工控机通过网线连接到具有WiFi功能的路由器上,将安卓平板连接上WiFi,如下图所示 下载NoMachine远程软件安装包,官网地址:https://www.nomachine.com/ 点击Download now按钮…...

pinctrl子系统简介
一. 简介 上一章我们编写了基于设备树的 LED 驱动,但是驱动的本质还是没变,都是配置 LED 灯所使用的 GPIO 寄存器,驱动开发方式和裸机基本没啥区别。 Linux 是一个庞大而完善的系统, 尤其是驱动框架,像 GPIO …...
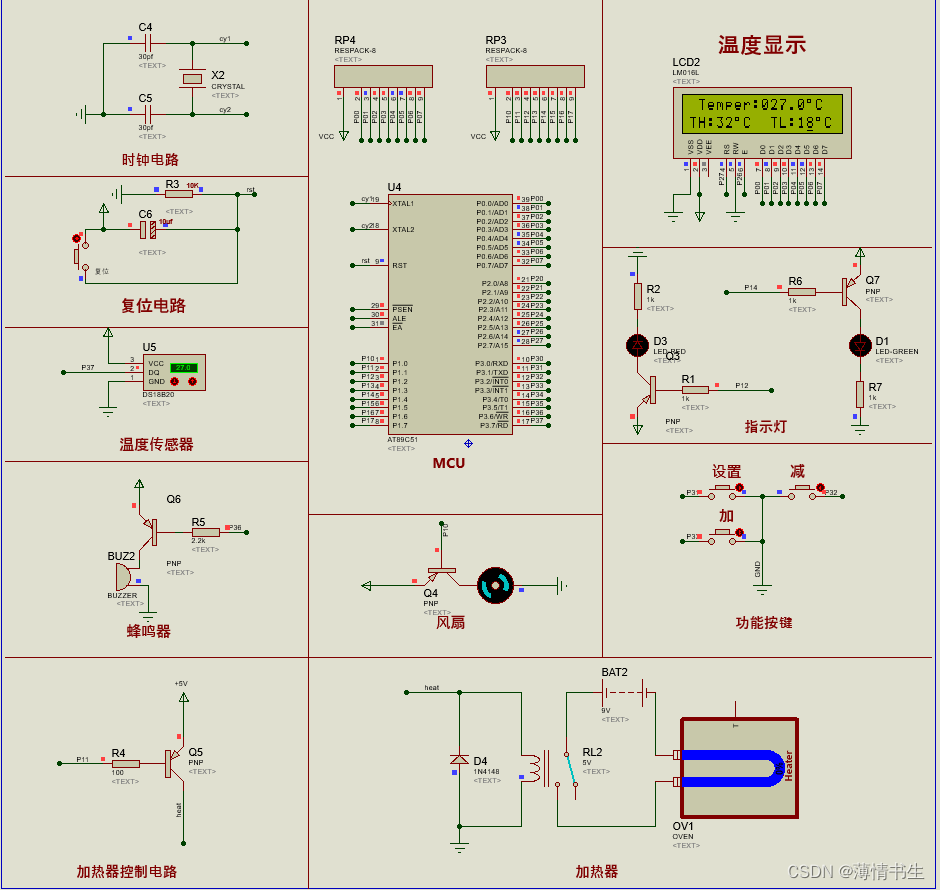
基于51单片机的温度报警控制系统Protues仿真设计
目录 一、设计背景 二、实现功能 三、总体硬件设计 四、仿真演示 四、源程序 一、设计背景 随着现代工农业技术的发展及人们对生活环境要求的提高,人们也迫切需要检测与了解环境温度。特别地,高温情况下极易造成火灾,例如,在…...

Android Studio中文界面完整汉化指南:三步打造母语开发环境
Android Studio中文界面完整汉化指南:三步打造母语开发环境 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack 还在为And…...

Phyphox实验避坑指南:测声速时管长、温度、管口校正那些事儿
Phyphox声速测量实验的进阶精度优化手册 在物理实验教学中,声速测量一直是验证波动理论的基础实践。但当智能手机传感器遇上共振管法,看似简单的实验背后藏着诸多魔鬼细节——管口切割的平整度会引入0.5%的误差,手掌温度能在3分钟内使铝管共振…...

照片直播如何实现?Android 通过 PTP/MTP 有线连接相机的技术方案
一、应用场景 在婚礼摄影、赛事记录、电商拍摄等业务中,客户往往希望: 摄影师按下快门,手机或平板立刻能看到照片。 常见传输方式的对比: 方式 问题 WiFi 延迟高、断连频繁 蓝牙 传输速度慢 有线 OTG ✅ 稳定、实时、低…...

使用 curl 命令直接测试 Taotoken 聊天补全接口的步骤详解
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用 curl 命令直接测试 Taotoken 聊天补全接口的步骤详解 在开发或调试大模型应用时,有时我们希望在脱离特定编程语言…...

告别‘Requirement already satisfied’:精准定位Python环境,让pip install不再迷茫
1. 为什么pip总是说"已经安装好了"? 每次看到"Requirement already satisfied"这个提示,我都想对着屏幕大喊:"不!它根本没装在我想要的地方!"这种抓狂的感觉,相信很多Python…...

从CLIP到车辆检索:解锁ViT大模型在跨摄像头ReID中的实战潜力
1. 当CLIP遇上车辆检索:ViT大模型的跨界实战 第一次看到CLIP模型在车辆重识别任务上的表现时,我对着屏幕上的mAP 84.5数据反复确认了三遍。这就像给一辆普通家用车换上了F1赛车的引擎,性能提升简单粗暴。传统ReID方法需要精心设计网络结构、调…...

GAMES101图形学笔记:从光栅化到路径追踪,我的自学避坑路线图
GAMES101图形学自学指南:从光栅化到路径追踪的实战路线 在B站上拥有数百万播放量的GAMES101课程,已经成为计算机图形学爱好者入门的黄金标准。作为一门融合数学、物理和编程的交叉学科,图形学的学习曲线往往令人望而生畏。本文将分享我自学G…...

高频电路中的隐形卫士:深度解析开关二极管BAV99的选型与应用
1. 高频电路中的隐形挑战:为什么需要BAV99? 当你设计一个高速数字接口或者射频模块时,最头疼的问题往往不是功能实现,而是那些看不见的高频干扰。我曾经在一个USB3.0接口保护电路的设计中,就因为选错了二极管ÿ…...

Windows防撤回补丁终极指南:微信QQ消息永久保存的完整解决方案
Windows防撤回补丁终极指南:微信QQ消息永久保存的完整解决方案 【免费下载链接】RevokeMsgPatcher :trollface: A hex editor for WeChat/QQ/TIM - PC版微信/QQ/TIM防撤回补丁(我已经看到了,撤回也没用了) 项目地址: https://gi…...

EC35编码器驱动踩坑实录:从波形分析到稳定读取,我的GD32调试笔记
EC35编码器驱动踩坑实录:从波形分析到稳定读取的GD32调试笔记 1. 问题初现:那些让人抓狂的"玄学"现象 第一次把EC35编码器接到GD32F303开发板上时,我天真地以为这不过是个简单的GPIO中断应用。按照常规思路配置了三个引脚的中断&am…...