使用docker配置semantic slam
一.Docker环境配置
1.拉取Docker镜像
sudo docker pull ubuntu:16.04
拉取的为ununtu16版本镜像,环境十分干净,可以通过以下命令查看容器列表
sudo docker images
如果想删除多余的docker image,可以使用指令
sudo docker rmi -f <id>2.创建容器
sudo docker run -it -v /home/pc/docker/senmantic:/home/pc/docker/senmantic --name=senmantic --net=host --env="DISPLAY" --volume="$HOME/.Xauthority:/root/.Xauthority:rw" ubuntu:16.04 /bin/bash
基于ubuntu16.04建立容器,并开启GUI功能。
进入容器后,会在root命令下,到此我们便得到了一个纯净的ubuntu环境。
可以使用sudo docker ps查看正在运行的容器,sudo docker ps -a查看所有容器
当我想要退出时,输入exit退出容器,然后使用sudo docker stop senmantic来停止容器,当我想再次进入容器时,使用sudo docker start senmantic启动容器,再使用sudo docker exec -it senmantic bash进入容器
3.环境配置
先在此容器下完成slam14讲的环境配置
git clone https://github.com/gaoxiang12/slambook2.git若下载失败或速度太慢可选择更改源,需先在该Container中安装vim
apt-get update
apt-get install vim
安装完成后通过vi /etc/apt/source.list更改source.list文件内容为
deb http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse
更改完成后执行apt-get update
下载完成后会在目录下看到slambook文件夹,因为在创建容器时使用了-v /home/pc/docker/senmantic:/home/pc/docker/senmantic ,完成了宿主和容器的挂载,因此二者的/home/pc/docker/slam目录是相通的,即在容器里把slambook文件夹放 到/home/pc/docker/senmantic/下,在宿主的相同目录下就会看到slambook文件夹。
主机在每次开机之后都需要运行下面的指令,来指定允许连接的主机。
xhost +why(这里wyh为主机名)运行之后,在docker容器内安装xarclock,运行指令
apt-get install xarclock
xarclock运行后,会出现一个小时钟,表明docker内可以开启GUI服务。
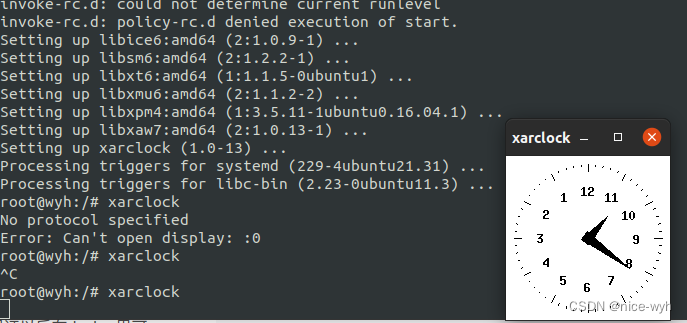
这样就可以保证以后在docker里可以显示opencv的图像和用rviz可视化地图了
二.工具包准备(以下操作在Docker环境下进行)
1.download senmantic slam的code
在senmantic文件夹下
mkdir catkin_ws
cd catkin_ws
mkdir src
cd src
git clone https://github.com/floatlazer/semantic_slam.git2.安装opencv3.3.0和python2.7
首先执行指令安装python2.7,然后查看版本
apt-get install python2.7
python2.7 --version
接下来去opencv官网找到opencv3.3.0的源码包,opencv3.3.3-github
下载下来后,进行编译安装,首先需要安装一些依赖和工具
apt-get install cmake gcc g++
apt-get install build-essential libgtk2.0-dev libgtk-3-dev libjpeg-dev libpng12-dev libvtk5-dev libtiff5-dev libjasper-dev libopenexr-dev libtbb-dev依赖安装好后,进行正式编译安装
mkdir build && cd build
cmake ..
make
make install最后调用指令查看opencv版本
pkg-config --modversion opencv

安装完可以去编译下slam14讲的ch5,运行
./imageBasics ../../imageBasics/ubuntu.png

可以在docker容器内显示图像,说明GUI功能可以使用
3.安装ORB-SLAM2的环境
安装eigen3
apt-get install libeigen3-dev安装Pangolin
Pangolin链接: https://pan.baidu.com/s/1kAquJdlwRhW84k_KFd9muA?pwd=uzus 提取码: uzus 复制这段内容后打开百度网盘手机App,操作更方便哦
需要先安装依赖
apt-get install libglew-dev然后直接编译安装
mkdir build && cd build
cmake..
make
make install编译ORBSLAM2
sh build.sh
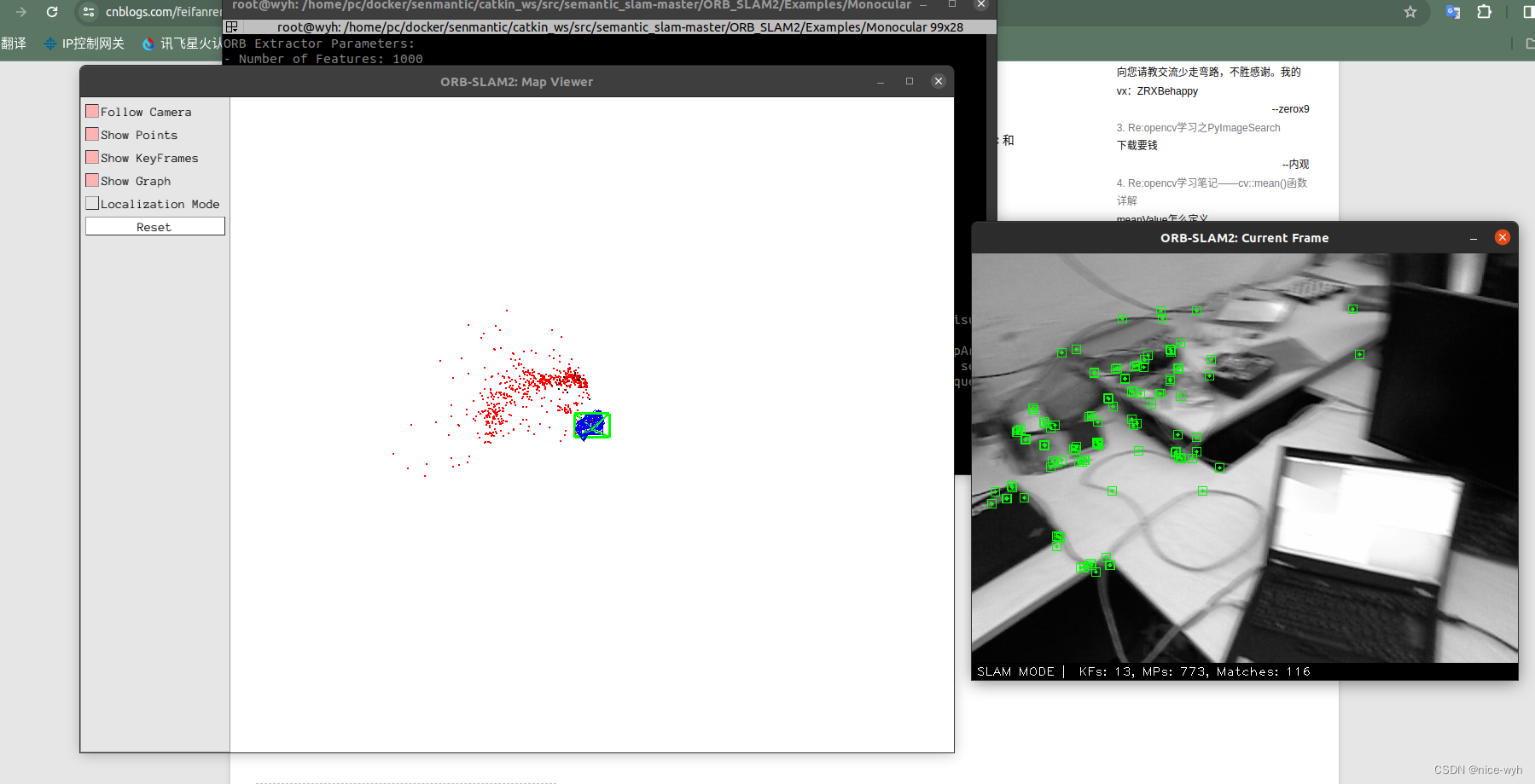
编译完成,现在来验证一下是否可以运行(首先需要下载好数据集),进入到ORB_SLAM2/Examples/Monocular/目录下
./mono_tum ../../Vocabulary/ORBvoc.txt TUM1.yaml ../../rgbd_dataset_freiburg1_room/
发现ORBSLAM2可以正常运行,而且可以实时显示建图效果!再一次说明GUI可以成功启用!
4.安装语义分割相关
安装ROS
安装ros
按照semantic slam中的github的要求,首先安装ros,执行以下命令添加 ROS 仓库源
sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ xenial main" > /etc/apt/sources.list.d/ros-latest.list'
然后添加ROS密钥
apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv=key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
然后
apt-get update然后安装ROS,成功之后可以在/opt/ros/kinect目录下看到ros成功安装
apt-get install ros-kinetic-openni2-launch
接下来进行ROS系统环境的配置
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
这样就完成了配置,运行roscore发现ROS可以正常启动
roscore
rosdep初始化
pip install rosdepc
rosdepc init
rosdepc update安装八叉树地图相关
apt-get install ros-kinetic-octomap-ros
apt-get install ros-kinetic-octomap-msgs
apt-get install ros-kinetic-octomap-server
apt-get install ros-kinetic-octomap-rviz-plugins安装语义分割相关
pip install torch-0.4.0-cp27-cp27mu-linux_x86_64.whl #1.0之前的版本要在官网上下载
pip install torchvision==0.2.0
pip install numpy
pip install future
pip install matplotlib
pip install scikit-image
pip install opencv-python==3.3.0.10
pip install tqdm==4.11.2
pip install cython
pip install pydensecrf
pip install tensorboardX
pip install scipy==0.19.0
pip install imgaug
pip install protobuf
要安装上述包,首先需要安装pip工具
apt-get install python-pip但是当我执行下面的指令时,回报错
pip2 install scikit-image
执行pip install --upgrade pip之后还是会报同样的错(如果有大佬知道为啥可以给我评论)
我的解决方法是这个链接下的解决方法一
最后直接pip安装成功
然后安装semantic_slam包
rosdep install semantic_slam会报错

因此命令改为(需要到源码下的semantic_salm的路径下执行)
rosdep install --from-paths semantic_slam --ignore-src --rosdistro=kinetic -r -y
成功

然后,执行
catkin_make发现缺少组件,逐个安装
apt install ros-kinetic-cv-bridge
apt install ros-kinetic-cmake-modules编译完成

三.运行配置
1.下载模型和demo.bag
在github下找到demo.bag和两个Model

下载好后,修改代码的semantic_slam/params/semantic_cloud.yaml的内容,把models的路径修改成自己的路径,例如我的为
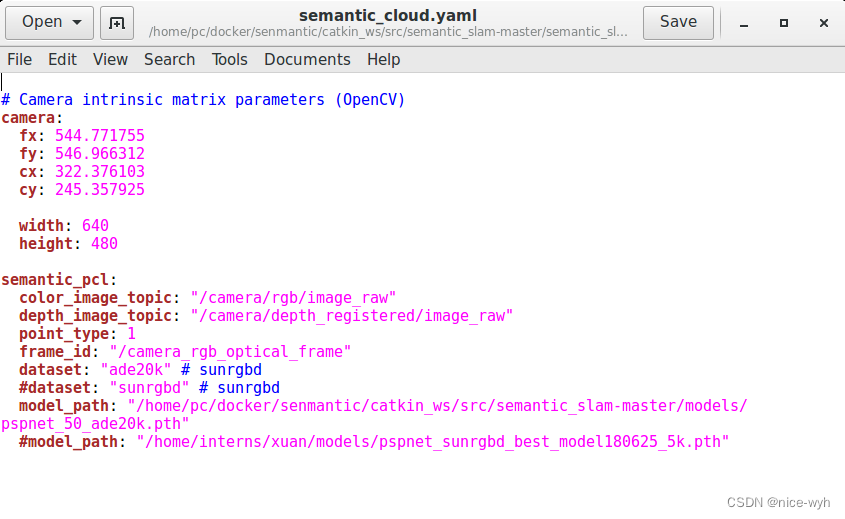
2.修改代码
由于docker里面没有GPU, 要把这个路径为catkin_ws/src/semantic_slam/semantic_cloud/src/semantic_cloud.py
ine 123, in init state = torch.load(model_path)转为cpu模式:
把这个 state = torch.load(model_path)改为
state = torch.load(model_path, map_location={'cuda:0': 'cpu'})
回到/catkin_ws下,重新编译
$ rm -rf build devel
$ catkin_make
3.还有一个小bug
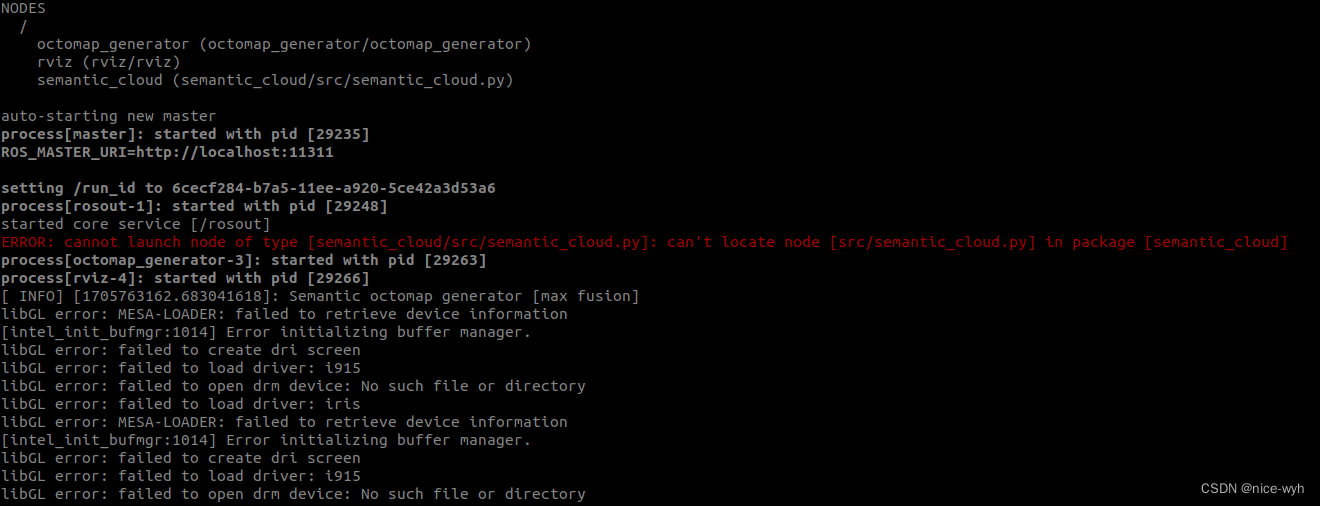
如果此时运行launch文件
roslaunch semantic_slam semantic_mapping.launch
会报错(即为下图标红处:ERROR: cannot launch node of type [semantic_cloud/src/semantic_cloud.py]: can't locate node [src/semantic_cloud.py] in package [semantic_cloud])
这个bug困扰我了我好久,直接导致节点发布失败,点云不能生成,rviz里一片空白
解决方法:确保 semantic_cloud.py 具有可执行权限(谁知道它本来没有可执行权限)
执行指令
chmod +x semantic_cloud.py
这样之后,再次运行
roslaunch semantic_slam semantic_mapping.launch和播放bag包
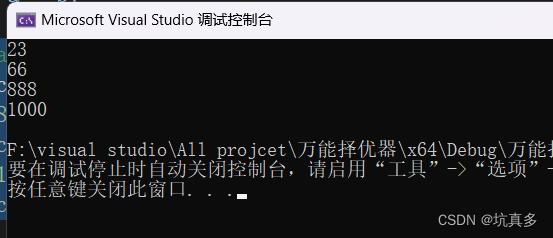
rosbag play --clock demo.bag就可以成功运行了!(终端输出如下三行说明配置正确)
最终放上效果

semantic_slam
相关文章:
使用docker配置semantic slam
一.Docker环境配置 1.拉取Docker镜像 sudo docker pull ubuntu:16.04拉取的为ununtu16版本镜像,环境十分干净,可以通过以下命令查看容器列表 sudo docker images 如果想删除多余的docker image,可以使用指令 sudo docker rmi -f <id&g…...

面试常问的Spring AOP底层原理
AOP底层原理可以划分成四个阶段:创建代理对象阶段、拦截目标对象阶段、调用代理对象阶段、调用目标对象阶段 第一阶段:创建代理对象阶段 通过getBean()方法创建Bean实例根据AOP的配置匹配目标类的类名,判断是否满足切…...
引用与指针)
C++拾遗(四)引用与指针
引用和指针是两种不同的概念,尽管它们在某些方面有一些相似之处,但它们在功能和用途上是有所区别 声明与定义 引用:引用是别名,是对已存在变量的另一个称呼,一旦一个变量被引用,就不能再被引用其他变 量…...
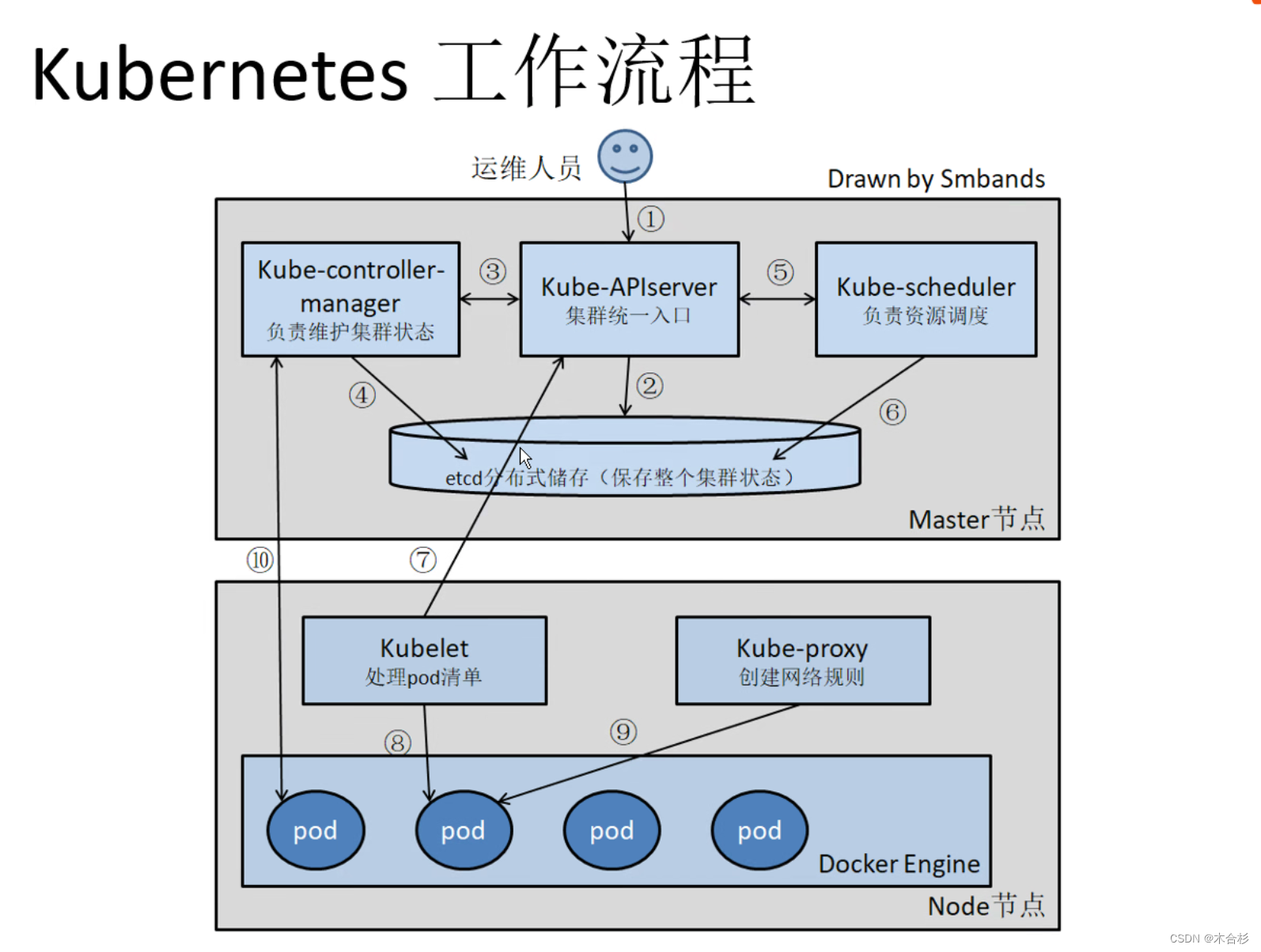
k8s架构、工作流程、集群组件详解
目录 k8s概述 特性 作用(为什么使用) k8s架构 k8s工作流程 k8s集群架构与组件 核心组件详解 Master节点 Kube-apiserver Kube-controller-manager Kube-scheduler 存储中心 etcd Node Kubelet Kube-Proxy 网络通信模型 容器引擎 k8s核…...
)
CF1362C Johnny and Another Rating Drop(二进制、复杂度考虑)
看完数据范围 n ∈ [ 1 , 1 e 18 ] n\in[1,1e18] n∈[1,1e18]就可以先猜一下要不是可以直接推公式,不能暴力去做,更不能遍历一遍,又看到这种2进制的题目,要猜是不是 l o g log log级别的复杂度。 可以依次考虑每一位 所有 i % 2 …...

1 - 搭建Redis数据库服务器|LNP+Redis
搭建Redis数据库服务器|LNPRedis 搭建Redis数据库服务器相关概念Redis介绍安装RedisRedis服务常用管理命令命令set 、 mset 、 get 、 mget命令keys 、 type 、 exists 、 del命令ttl 、 expire 、 move 、 flushdb 、flushall 、save、shutdown 配置文件解析 LNP …...

米贸搜|Facebook“精准营销”越来越难?或许是“受众定位”没彻底搞清!
一、为何要确定目标受众 对于每个广告主而言,面向最有可能成为其客户的用户营销非常重要,因此,确定目标受众,是Facebook广告投放中极其重要的一环。 二、什么是目标受众? 目标受众是您希望向其传达营销信息…...

【C++】内存分区模型
目录 1.程序运行前 2.程序运行后 3. new操作符 3.1 基本语法 3.2 开辟数组 C程序在执行时,将内存大方向划分为4个区域 代码区:存放函数体的二进制代码,由操作系统进行管理的 全局区: 存放全局变量和静态变量以及常量栈区 …...

通过strings二进制文件分析工具排查 version ‘GLIBC_2.25‘ not found 报错
strings命令简介 strings命令用于打印文件中可打印字符串, 可以打印文本文件、可执行程序,库文件等。一般用于分析可执行程序和库文件。strings命令较为常用的功能有以下两种 查看系统的GLIBC版本和目标文件的依赖的GLIBC版本,当系统的GLIBC版本与目标文…...
基于 MQTT 的开源桥接器:自由控制物联网设备 | 开源日报 No.151
Koenkk/zigbee2mqtt Stars: 10.5k License: GPL-3.0 Zigbee2MQTT 是一个 Zigbee 🐝 到 MQTT 桥接器 🌉,可以摆脱专有的 Zigbee 桥接器 🔨 允许您在不使用供应商桥接器或网关的情况下使用 Zigbee 设备通过 MQTT 桥接事件并控制 Z…...
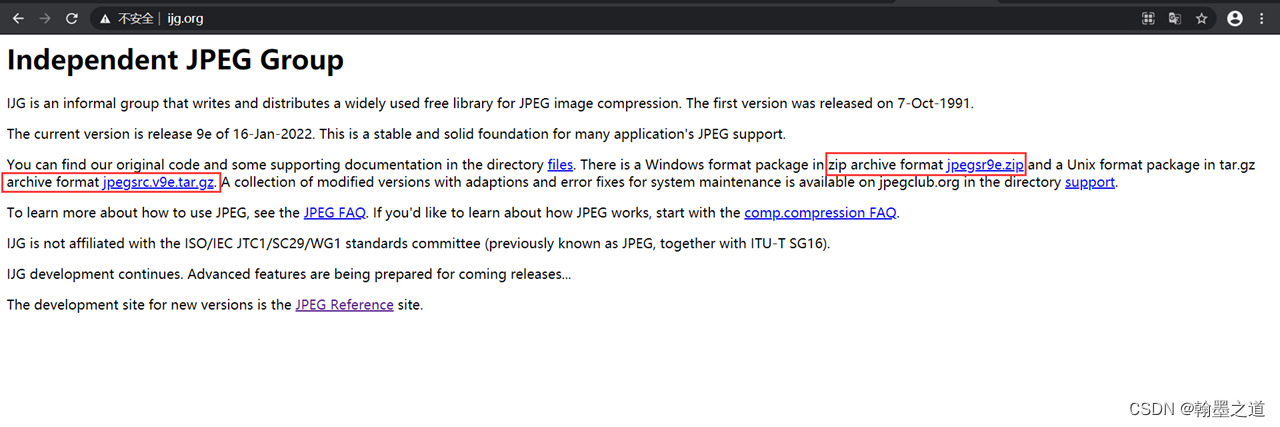
【QT+QGIS跨平台编译】之七:【libjpeg+Qt跨平台编译】(一套代码、一套框架,跨平台编译)
文章目录 一、libjpeg介绍二、文件下载三、文件分析四、pro文件五、编译实践一、libjpeg介绍 libjpeg是一个广泛使用的jpeg图像压缩和解压的函数库,采用 C 语言开发。 2013年1月,Independent JPEG Group发布了版本9,对新引入的无损编码模式进行了改进。2022年1月,发布了版…...
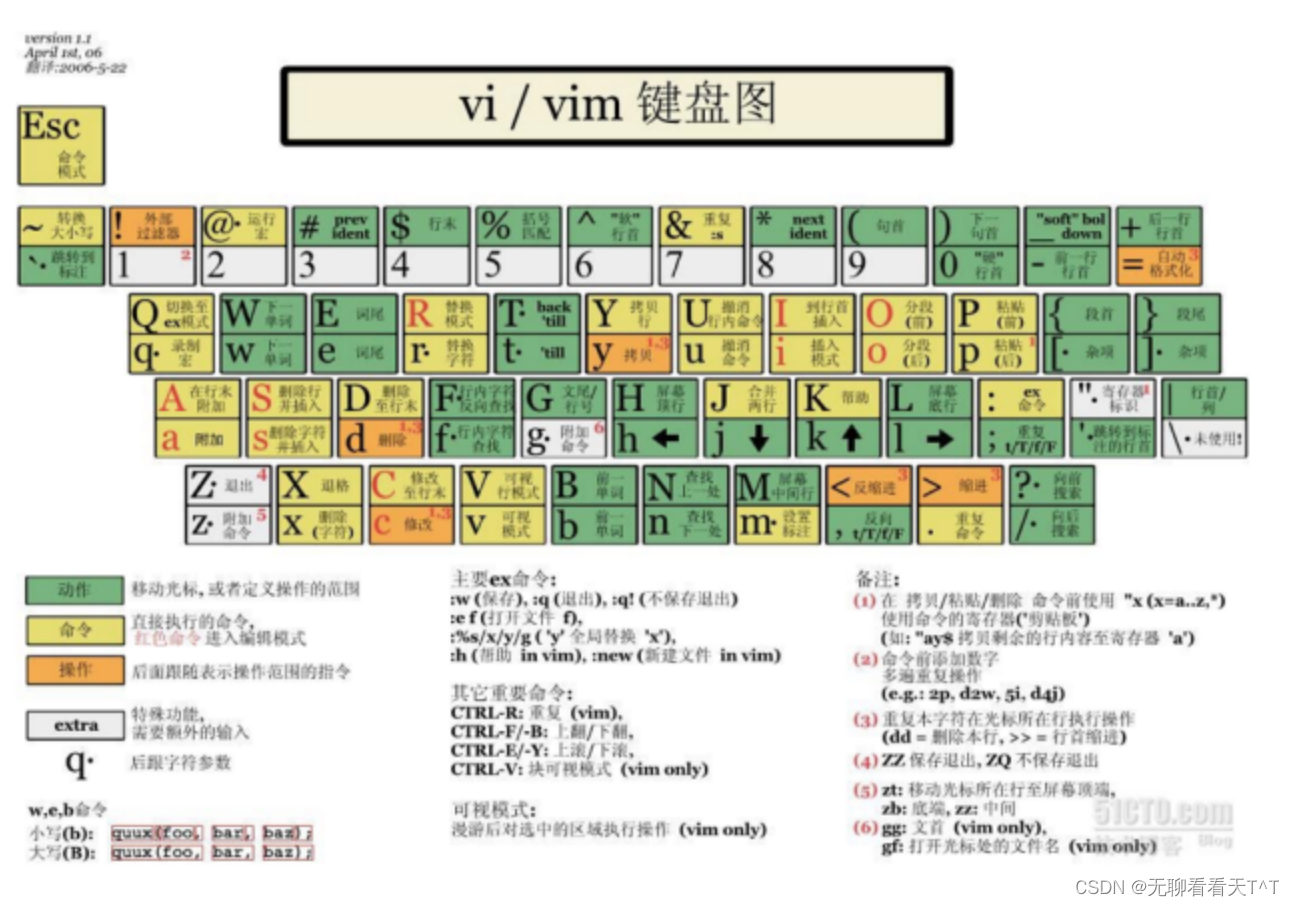
VI / VIM的使用
vi/vim 的区别简单点来说,它们都是多模式编辑器,不同的是 vim 是 vi 的升级版本,它不仅兼容 vi 的所有指令,而且 还有一些新的特性在里面。例如语法加亮,可视化操作不仅可以在终端运行,也可以运行于 x win…...
第十二站(20天):C++泛型编程
模板 C提供了模板(template)编程的概念。所谓模板,实际上是建立一个通用函数或类, 其 类内部的类型和函数的形参类型不具体指定 ,用一个虚拟的类型来代表。这种通用的方式称 为模板。 模板是泛型编程的基础, 泛型编程即以一种独立于任何特定…...

【Docker】Dokcer学习① - 简介
【Docker】Docker学习① - 简介 一、Docker简介1. Docker是什么2. Docker组成3. Docker对比虚拟机4. Linux Namespace技术5. Linux control groups6. 容器管理工具 二、Docker安装及基础命令介绍三、Docker镜像管理四、Docker镜像与制作五、Docker数据管理六、网络部分七、Dock…...

PostgreSQL 100条命令
我会为您提供一些 PostgreSQL 中最常用的命令: 1. 创建数据库:CREATE DATABASE database_name; 2. 连接到数据库:\c database_name; 3. 创建表格:CREATE TABLE table_name (column1 datatype, column2 datatype, ...); 4. 插入数…...

HTTP动态代理的原理及其对网络性能的影响
HTTP动态代理是一种通过代理服务器来转发HTTP请求和响应数据的网络技术,它可以优化网络性能、提高网络安全性,并解决跨域请求的问题。本文将详细介绍HTTP动态代理的原理及其对网络性能的影响。 一、HTTP动态代理的原理 HTTP动态代理的基本原理是在客户…...
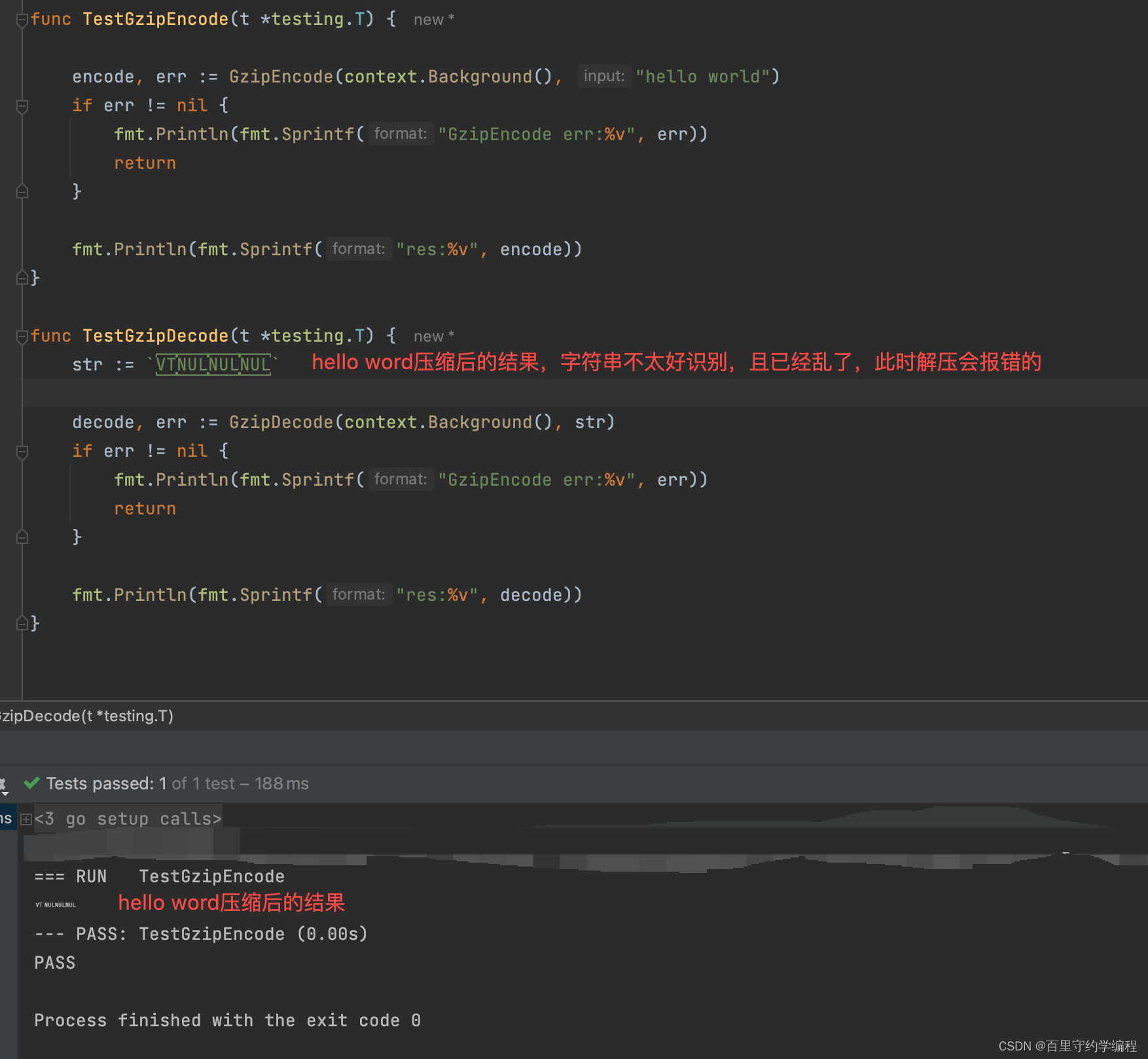
69.使用Go标准库compress/gzip压缩数据存入Redis避免BigKey
文章目录 一:简介二:Go标准库compress/gzip包介绍ConstantsVariablestype Headertype Reader 三:代码实践1、压缩与解压工具包2、单元测试3、为何压缩后还要用base64编码 代码地址: https://gitee.com/lymgoforIT/golang-trick/t…...

JavaScript实现的一些小案例
小案例 灯开关案例 <body><img id"light" src"img/off.jpg"><script>var light document.getElementById("light");var flag false;if(flag){light.src "img/on.jpg";flag false;}else{light.src "img/…...
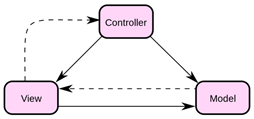
MVC模式
Model-View-Controller : 模型-视图-控制器模式,用于应用程序的分层开发。 Model(模型):代表一个存取数据的对象。也可以带有逻辑,在数据变化时更新控制器。 View(视图):代表模型包含的数据的可视化。 Controller(控制器)…...
)
Java中的代理模式(一)
大家好👋,我是极客涛😎,今天我们聊一聊java中的代理模式,话不多说,还是老思路,什么是代理模式,为什么要有代理模式,如何实现代理模式 代理模式 在说java中的代理模式之前…...

如何在Windows电脑上直接安装Android应用:3种简单高效的APK安装方法
如何在Windows电脑上直接安装Android应用:3种简单高效的APK安装方法 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 想在Windows电脑上流畅运行Android应用…...

0.001秒的革命:毫秒用算如何改写算力规则?
中国算力网络的升级之路 过去十年,中国建成了全球最密集的5G网络和最广泛的光纤覆盖。过去五年,算力规模迅速扩张,“东数西算”工程全面铺开。 但当AI大模型开始嵌入日常交互、低空经济在多个城市试点运行、智能网联汽车进入规模化测试阶段…...

Meshroom终极指南:免费开源3D重建软件,从照片到三维模型的完整解决方案 [特殊字符]
Meshroom终极指南:免费开源3D重建软件,从照片到三维模型的完整解决方案 🚀 【免费下载链接】Meshroom Node-based Visual Programming Toolbox 项目地址: https://gitcode.com/gh_mirrors/me/Meshroom Meshroom是一款革命性的开源3D重…...

基于 4SAPI 的企业文档智能处理系统:效率提升 20 倍,信息提取准确率 95%
前言 在数字化转型的今天,企业积累了海量的非结构化文档数据,包括合同、财务报表、技术手册、产品说明书、会议纪要、法律文件等。这些文档中蕴含着企业最核心的知识和资产,但传统的人工文档处理模式已经成为企业数字化的最大瓶颈࿱…...

3种高效方案:让Windows直接运行Android应用的全新体验手册
3种高效方案:让Windows直接运行Android应用的全新体验手册 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 想象一下这样的场景:您需要在电脑上快…...

禅论技术分析插件:通达信量化交易系统的架构与实践
禅论技术分析插件:通达信量化交易系统的架构与实践 【免费下载链接】Indicator 通达信缠论可视化分析插件 项目地址: https://gitcode.com/gh_mirrors/ind/Indicator 禅论作为中国特色的技术分析理论,其严谨的数学结构和逻辑体系为市场分析提供了…...
)
从原理图到PCB:手把手教你搞定PCIE X4接口的完整电路设计(附时钟、电源、热插拔信号详解)
从原理图到PCB:手把手教你搞定PCIE X4接口的完整电路设计 在高速数字电路设计中,PCIE接口因其出色的带宽和稳定性,已成为现代计算机系统中不可或缺的组成部分。无论是主板设计、显卡开发还是各类扩展卡,PCIE接口的正确实现直接关…...

3步构建个人知识库:微信读书笔记智能同步终极方案
3步构建个人知识库:微信读书笔记智能同步终极方案 【免费下载链接】obsidian-weread-plugin Obsidian Weread Plugin is a plugin to sync Weread(微信读书) hightlights and annotations into your Obsidian Vault. 项目地址: https://gitcode.com/gh_mirrors/ob…...

如何在5分钟内快速上手LeRobot机器人AI控制框架:从零到一的完整指南
如何在5分钟内快速上手LeRobot机器人AI控制框架:从零到一的完整指南 【免费下载链接】lerobot 🤗 LeRobot: Making AI for Robotics more accessible with end-to-end learning 项目地址: https://gitcode.com/GitHub_Trending/le/lerobot 还在为…...

不只是显示中文:用fbterm给你的CentOS终端换个‘皮肤’,提升老旧服务器运维效率
终端美学革命:用fbterm打造高效CentOS字符界面工作环境 在服务器运维的世界里,图形界面往往被视为奢侈品。当您面对一台资源受限的老旧CentOS服务器,或者需要远程管理没有X11支持的机器时,字符界面就成了唯一的选择。但单调的终端…...