回归预测 | Matlab基于POA-LSSVM鹈鹕算法算法优化最小二乘支持向量机的数据多输入单输出回归预测
回归预测 | Matlab基于POA-LSSVM鹈鹕算法算法优化最小二乘支持向量机的数据多输入单输出回归预测
目录
- 回归预测 | Matlab基于POA-LSSVM鹈鹕算法算法优化最小二乘支持向量机的数据多输入单输出回归预测
- 预测效果
- 基本介绍
- 程序设计
- 参考资料
预测效果








基本介绍
Matlab基于POA-LSSVM鹈鹕算法算法优化最小二乘支持向量机的数据多输入单输出回归预测(完整源码和数据)
1.data为数据集,输入6个特征,输出一个变量。
2.main.m为程序主文件,其余为函数文件无需运行。
3.鹈鹕算法算法算法优化最小二乘支持向量机,优化RBF核函数gam和sig。
4.注意程序和数据放在一个文件夹,运行环境为Matlab2018及以上.
5.命令窗口输出R2、MSE、MAE、MAPE和MBE多指标评价;
6.程序语言为matlab,程序可出预测效果图,迭代优化图,相关分析图;
7.代码特点:参数化编程、参数可方便更改、代码编程思路清晰、注释明细。
程序设计
- 完整程序和数据下载方式(资源处直接下载): Matlab基于POA-LSSVM鹈鹕算法算法优化最小二乘支持向量机的数据多输入单输出回归预测
%% 清空环境变量
warning off % 关闭报警信息
close all % 关闭开启的图窗
clear % 清空变量
clc % 清空命令行%% 划分训练集和测试集
M = size(P_train, 2);
N = size(P_test, 2);%% 数据归一化
[p_train, ps_input] = mapminmax(P_train, 0, 1);
p_test = mapminmax('apply', P_test, ps_input);[t_train, ps_output] = mapminmax(T_train, 0, 1);
t_test = mapminmax('apply', T_test, ps_output);%% 转置以适应模型
p_train = p_train'; p_test = p_test';
t_train = t_train'; t_test = t_test';%% 参数设置
pop = 5; % 种群数目
Max_iter = 50; % 迭代次数
dim = 2; % 优化参数个数
lb = [10, 10]; % 下限
ub = [1000, 1000]; % 上限%% 优化函数
fobj = @(x)fitnessfunclssvm(x, p_train, t_train);%% 优化%% LSSVM参数设置
type = 'f'; % 模型类型 回归
kernel = 'RBF_kernel'; % RBF 核函数
proprecess = 'preprocess'; % 是否归一化%% 建立模型
gam = Best_score(1);
sig = Best_score(2);
model = initlssvm(p_train, t_train, type, gam, sig, kernel, proprecess);%% 训练模型
model = trainlssvm(model);%% 模型预测
t_sim1 = simlssvm(model, p_train);
t_sim2 = simlssvm(model, p_test);%% 数据反归一化
T_sim1 = mapminmax('reverse', t_sim1, ps_output);
T_sim2 = mapminmax('reverse', t_sim2, ps_output);%% 均方根误差
error1 = sqrt(sum((T_sim1' - T_train).^2) ./ M);
error2 = sqrt(sum((T_sim2' - T_test ).^2) ./ N);参考资料
[1] https://blog.csdn.net/article/details/126072792?spm=1001.2014.3001.5502
[2] https://blog.csdn.net/article/details/126044265?spm=1001.2014.3001.5502
[3] https://blog.csdn.net/article/details/126043107?spm=1001.2014.3001.5502
相关文章:
回归预测 | Matlab基于POA-LSSVM鹈鹕算法算法优化最小二乘支持向量机的数据多输入单输出回归预测
回归预测 | Matlab基于POA-LSSVM鹈鹕算法算法优化最小二乘支持向量机的数据多输入单输出回归预测 目录 回归预测 | Matlab基于POA-LSSVM鹈鹕算法算法优化最小二乘支持向量机的数据多输入单输出回归预测预测效果基本介绍程序设计参考资料 预测效果 基本介绍 Matlab基于POA-LSSVM…...

把 matlab 公式输出成 latex 公式形式
问题 latex 进行符号计算后,想直接把 matlab 中变量代表的公式结果输出成 latex 形式。 这样可以直接 复制到 latex 中,不需要手打公式了。 方法 matlab 函数 latex 可以实现上述功能,但最好是 使用 simpify(expand(~)) 进行化简 str_Jac…...

云上自动部署丨使用 Terraform 在 AWS 上搭建 DolphinDB
HashiCorp Terraform 是一款基础架构即代码工具,旨在实现 "Write, Plan, and Create Infrastructure as Code"。它通过配置文件来描述云资源的拓扑结构,包括虚拟机、存储账户和网络接口。Terraform 几乎支持市面上所有的云服务,能够…...
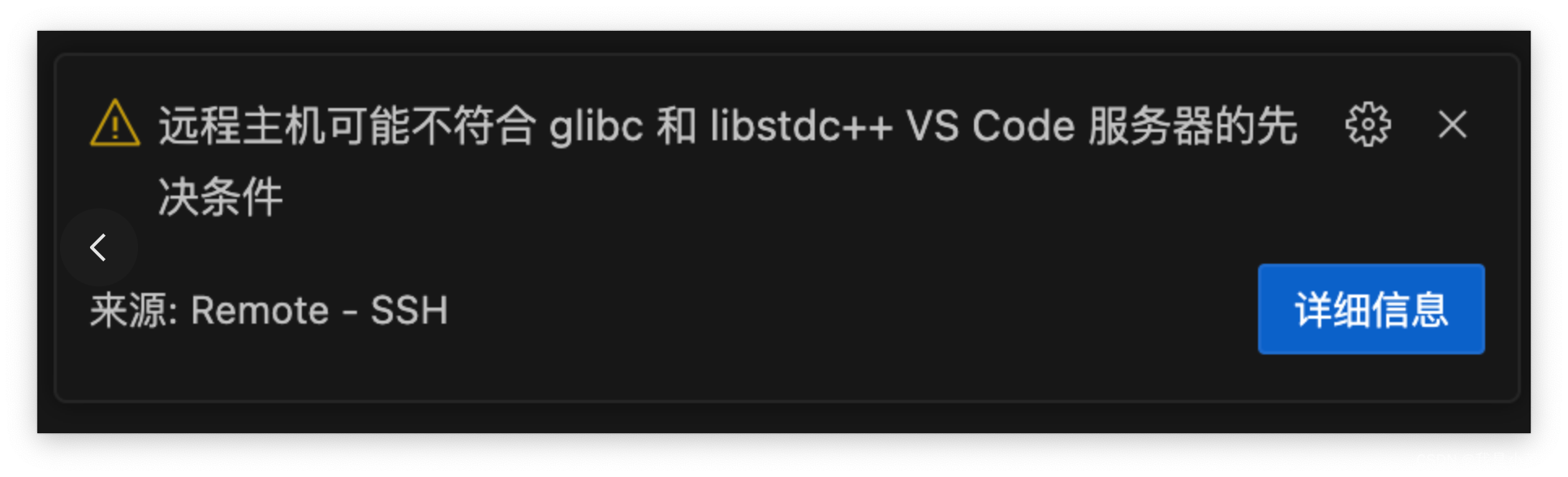
vscode的ssh忽然连不上服务器:远程主机可能不符合glibc和libstdc++ VS Code服务器的先决条件
vscode自动更新了一下就发现连不上服务器了,我寻思估计一大堆人都寄了,一搜,果然哈哈哈哈 然后我直接搜一天内新发布的博客,还真给我搜到了这个问题,按照这个问题里面的回答(vscode1.86无法远程连接waitin…...
C++(17)——list的模拟实现
前面的文章中,介绍了,的模拟实现,本篇文章将介绍对于的模拟实现。 目录 1. list的基本结构: 2. list功能实现:尾部插入元素: 3. list迭代器的实现: 4. list功能实现:在任意位置前…...

花瓣网美女图片爬取
爬虫基础案例01 花瓣网美女图片 网站url:https://huaban.com 图片爬取 import requests import json import os res requests.get(url "https://api.huaban.com/search/file?text%E7%BE%8E%E5%A5%B3&sortall&limit40&page1&positionsear…...

Android native层c++调用java层API
在Android开发中,从本地(native)代码调用Java层的接口是一个常见的需求,尤其是在使用JNI(Java Native Interface)进行混合编程时。以下是一个基本的步骤指南,展示如何从C代码调用Java方法&#…...

Docker 集群配置
1、配置 MySQL MySQL 简单安装 docker安装完MySQL并run出容器后,建议请先修改完字符集编码后再新建mysql库-表-插数据 docker run -d -p 2222:3306 --privilegedtrue -e MYSQL_ROOT_PASSWORD123456 \ -v /opt/mysql/log:/var/log/mysql \ -v /opt/mysql/data:/va…...
VUE3+elementPlus 之 Form表单校验器 之 字符长度校验
需求:校验字符长度,超过后仍可输入,error提示录入字符数与限制字符数 校验字符长度: /*** 检验文字输入区的长度* param {*} rule 输入框的rule 对象,field:字段名称* param {*} value …...
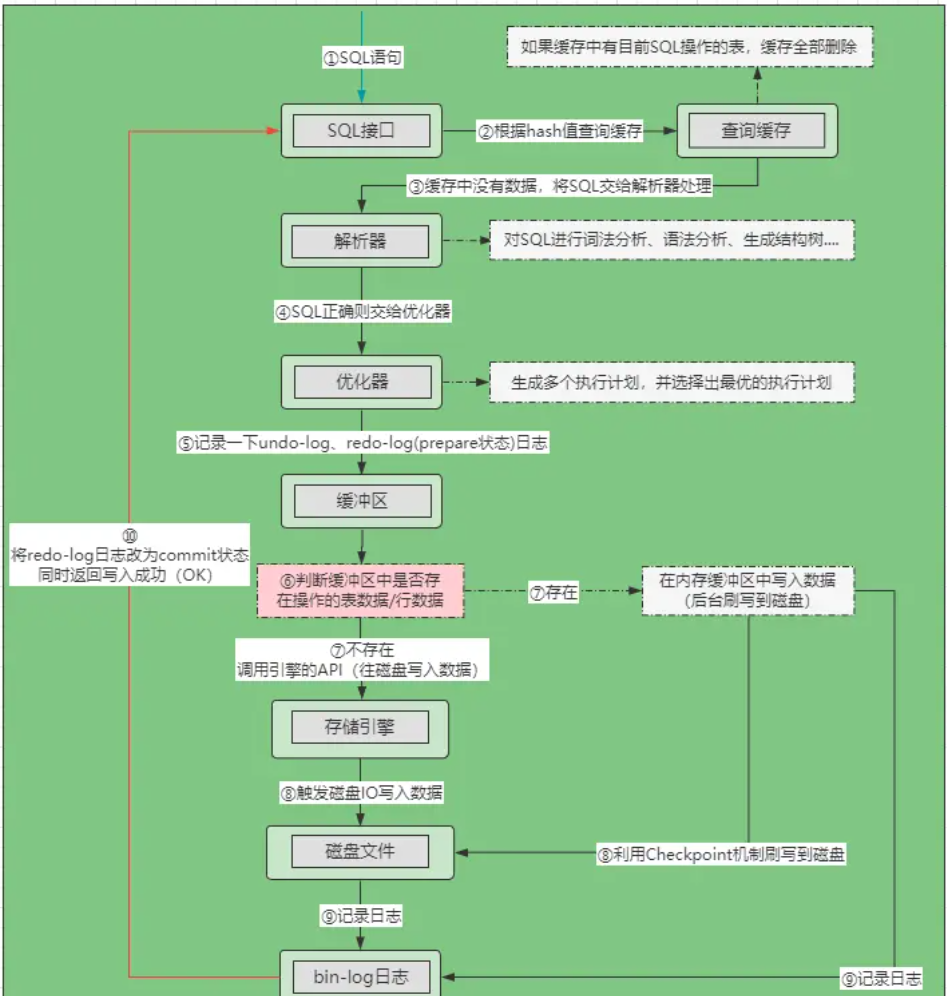
【Mysql】数据库架构学习合集
目录 1. Mysql整体架构1-1. 连接层1-2. 服务层1-3. 存储引擎层1-4. 文件系统层 2. 一条sql语句的执行过程2-1. 数据库连接池的作用2-2. 查询sql的执行过程2-1. 写sql的执行过程 1. Mysql整体架构 客户端: 由各种语言编写的程序,负责与Mysql服务端进行网…...
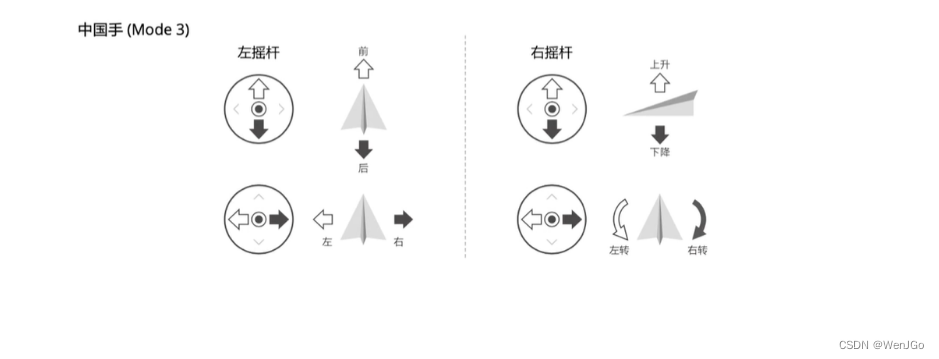
轻型民用无人机驾驶航空器安全操控——理论考试多旋翼部分笔记
今天已经可以在线考取轻型民用无人机驾驶航空器执照了,所以我也在在线观看完视频之后整理了如下的知识点,所有知识点全部来自UOM平台。 目录 航空器知识 (1)多旋翼民用无人驾驶航空器螺旋桨的作用 (2&#x…...
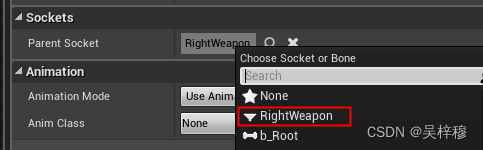
UE4学习笔记 FPS游戏制作3 添加武器
文章目录 章节目标为骨骼添加武器挂载点添加武器 章节目标 本章节为手部添加一个武器挂载点,并挂载一个武器 为骨骼添加武器挂载点 添加挂载点需要以一个动画片段为基础,为骨骼添加挂载点。 首先找到我们需要的动画片段,通常是idle 双击打…...

详解 Prim 算法的实现
一、算法思路 Prim 算法是用来求最小生成树的,它的思想也有点类似于贪心——逐个将离当前集合最近的点加入到集合中,直至发现图不连通或所有点都被加到集合中,算法即宣告终止。它的具体做法是: step 1:初始时…...

Android 使用高德地图
一、获取高德平台key 【1】基于application包名&sha1值在高德控制台获取key值,详情参考: 获取Key-创建工程-开发指南-Android 地图SDK | 高德地图API 【2】在manifest中声明权限 【3】将拿到的key值在manifest中进行声明 <!--允许程序打开网络…...
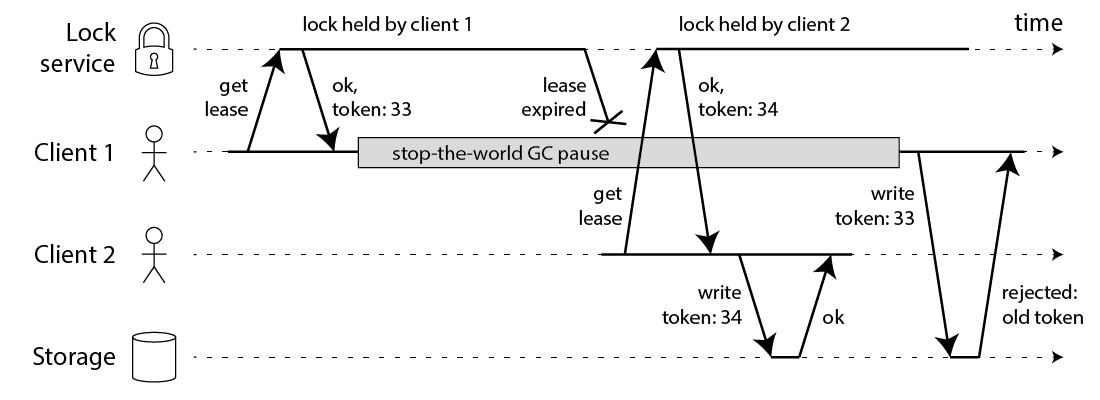
从redis setnx 来看看分布式锁
什么是分布式锁 分布式锁(多服务共享锁)在分布式的部署环境下,通过锁机制来让多客户端互斥的对共享资源进行访问/操作。 为什么需要分布式锁 在单体应用服务里,不同的客户端操作同一个资源,我们可以通过操作系统提供…...
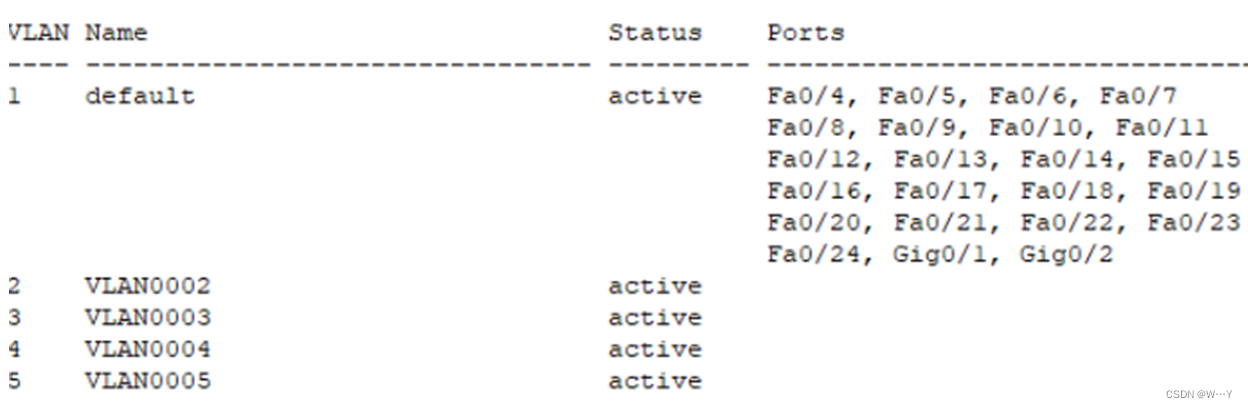
校园网网络规划与设计——计算机网络实践报告
W...Y的主页 😊 代码仓库分享💕 目录 一、设计目的 二、软硬件环境 三、理论基础 四、设计方案 五、网络配置步骤 六、设计过程中出现的问题及相应解决办法 八、参考资料 一、设计目的 深入理解网络工程的三层层次设计模型; 掌握网络…...
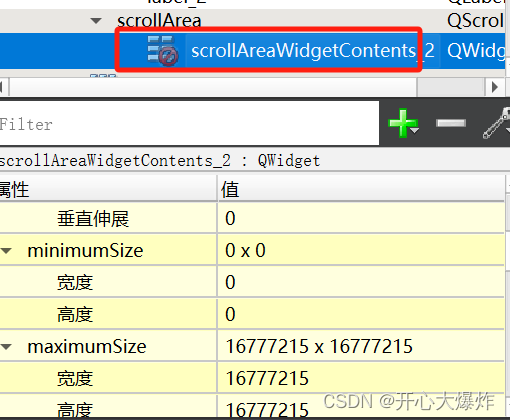
Qt QScrollArea 不显示滚动条 不滚动
使用QScrollArea时,发现添加的控件超出QScrollArea 并没有显示,且没有滚动条效果 原因是 scrollArea指的是scrollArea控件本身的大小,肉眼能看到的外形尺寸。 scrollAreaWidgetContents指的是scrollArea控件内部的显示区域,里面可…...

【SVN在Linux下的常用指令】
windows下的TortoiseSVN是资源管理器的一个插件,以覆盖图标表示文件状态,几乎所以命令都有图形界面支持,比较好用,这里就不多说。主要说说linux下svn的使用,因为linux下大部分的操作都是通过命令行来进行,所…...

2024 高级前端面试题之 Node 「精选篇」
该内容主要整理关于 Node 模块的相关面试题,其他内容面试题请移步至 「最新最全的前端面试题集锦」 查看。 Node模块精选篇 1. package.json版本号规则2. package.json 与 package-lock.json 的关3. npm 模块安装机制4. 模块化的差异 AMD CMD COMMONJS ESMODUL5. No…...
linux麒麟系统安装mongodb7.0
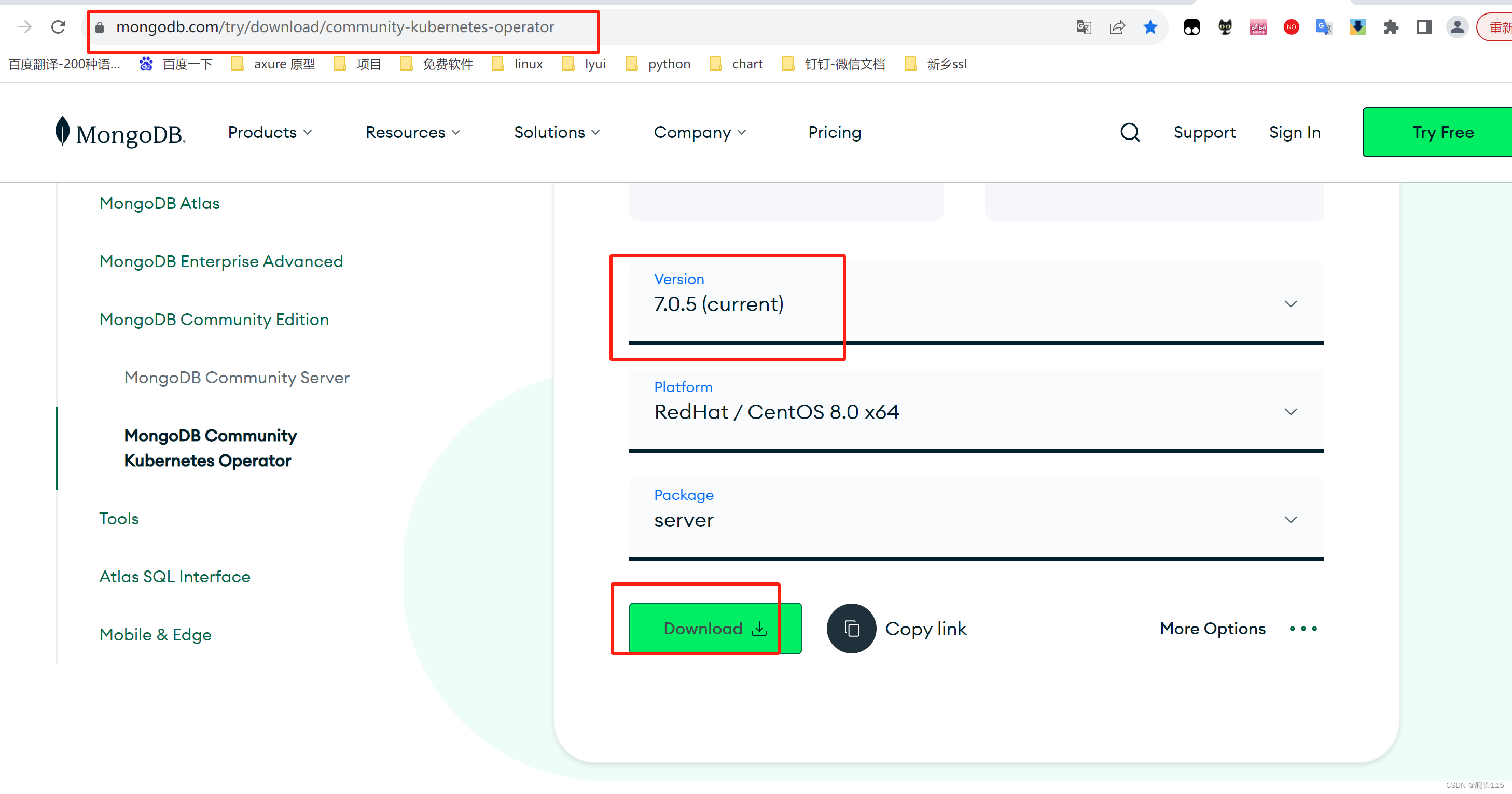
1.mogedb下载 下载的是他tar包 https://fastdl.mongodb.org/linux/mongodb-linux-x86_64-rhel80-7.0.5.tgz wget -o https://fastdl.mongodb.org/linux/mongodb-linux-x86_64-rhel80-7.0.5.tgz 也可以下载rpm包 2.将包上传至服务器并解压 #进入目录 并解压 cd /opt/ tar…...

GEO优化的两大误区:你是在“交学费”还是在“抢红利”?
当AI搜索成为用户的新入口,一批先行者已经吃到了红利。但更多人,还在两个极端之间摇摆。 你有没有遇到过这样的情况? 刷到某个同行,因为上了DeepSeek或豆包的推荐,咨询量翻了几倍。你也心动,开始研究GEO&a…...
)
别再死记硬背了!用Unity可视化工具一步步拆解A*寻路算法(附完整C#源码)
用Unity可视化工具玩转A*寻路算法:从理论到实战的沉浸式学习 在游戏开发的世界里,路径规划算法就像是一位隐形的向导,决定着NPC如何绕过障碍物找到玩家,或是战略游戏中单位如何选择最优行军路线。A*算法作为其中最耀眼的明星&…...

Lemur性能优化:10个提升证书管理平台响应速度的技巧
Lemur性能优化:10个提升证书管理平台响应速度的技巧 【免费下载链接】lemur Repository for the Lemur Certificate Manager 项目地址: https://gitcode.com/gh_mirrors/le/lemur Lemur作为一款开源证书管理平台,能够帮助用户轻松管理SSL/TLS证书…...

CANN/pypto CODEGEN组件错误码
CODEGEN 组件错误码 【免费下载链接】pypto PyPTO(发音: pai p-t-o):Parallel Tensor/Tile Operation编程范式。 项目地址: https://gitcode.com/cann/pypto 范围:F6XXXX本文档说明 CODEGEN 组件的错误码定义、场景说明与排…...

巴别鸟vs坚果云:企业云盘同步机制踩坑与实战配置
干企业网盘这行,最怕听到用户说"同步慢"。我们2019年上线第一版云盘时,同步1GB的CAD图纸包要40分钟,用户骂完就跑。踩了三年坑才知道,"能同步"和"同步好用"根本是两回事。 本文从踩坑实录加配置实战…...

SVM实战调参指南:从标准化、核函数到支持向量解读
1. 这不是教科书里的SVM,而是我亲手调过37次参数后才敢写的入门实录Support Vector Machine(SVM)这个词,第一次见是在三年前的某次算法面试里。面试官问:“你说说SVM为什么叫‘支持向量’?”我张了张嘴&…...

3个理由告诉你:为什么Notepad2-mod是你开启开源贡献的最佳起点
3个理由告诉你:为什么Notepad2-mod是你开启开源贡献的最佳起点 【免费下载链接】notepad2-mod LOOKING FOR DEVELOPERS - Notepad2-mod, a Notepad2 fork, a fast and light-weight Notepad-like text editor with syntax highlighting 项目地址: https://gitcode…...

软考高项案例分析8:项目风险管理
软考高项案例分析8:项目风险管理 一、项目风险管理过程 1、规划风险管理; 2、识别风险; 3、实施定性风险分析; 4、实施定量风险分析; 5、规划风险应对; 6、实施风险应对; 7、监督风险; 二、案例分析知识点 1. 风险应对措施 威胁应对策略:上报、规避、转移、…...

蒙古语AI语音落地难?ElevenLabs最新v3.2模型支持率提升至98.7%,但90%开发者忽略这5个编码陷阱
更多请点击: https://intelliparadigm.com 第一章:蒙古语AI语音落地的现实困境与技术拐点 蒙古语作为中国少数民族语言中使用人口较多、语法高度黏着、音系复杂的阿尔泰语系代表,其AI语音技术长期受限于低资源特性——标准语音数据集不足50小…...
)
【编号884】江西省各城市-春节人口迁徙规模数据(2019-2025)
今天分享的是 江西省各城市-春节人口迁徙规模数据(2019-2025)数据概况 江西省各城市-春节人口迁徙规模数据(2019-2025) 春节地级市人口迁徙指数(2019-2025)迁徙指数依托位置时空大数据构建,形…...