基于OpenCV灰度图像转GCode的单向扫描实现
- 基于OpenCV灰度图像转GCode的单向扫描实现
- 引言
- 单向扫描存在的问题
- 灰度图像单向扫描代码示例
- 结论
系列文章
- ⭐深入理解G0和G1指令:C++中的实现与激光雕刻应用
- ⭐基于二值化图像转GCode的单向扫描实现
- ⭐基于二值化图像转GCode的双向扫描实现
- ⭐基于二值化图像转GCode的斜向扫描实现
- ⭐基于二值化图像转GCode的螺旋扫描实现
- ⭐基于OpenCV灰度图像转GCode的单向扫描实现
- ⭐基于OpenCV灰度图像转GCode的双向扫描实现
- ⭐基于OpenCV灰度图像转GCode的斜向扫描实现
- ⭐基于OpenCV灰度图像转GCode的螺旋扫描实现
⭐**系列文章GitHub仓库地址**
基于OpenCV灰度图像转GCode的单向扫描实现
本文将介绍如何使用OpenCV库将灰度图转换为GCode,并通过单向扫描实现对图像的激光雕刻。GCode是一种用于控制数控机床和3D打印机的指令语言,而OpenCV是一种开源计算机视觉库。通过结合这两者,我们可以实现从图像到GCode的转换,进而在机器上实现图像的物理输出。
引言
在数字制造时代,将图像转换为GCode是实现自动化加工和打印的关键步骤。本文将探讨如何利用OpenCV库将灰度图转换为GCode,并通过单向扫描的方式实现对图像的激光雕刻。

上图是未做任何处理,直接从灰度图转换成GCode。

优化后生成的GCode如上所示:

原始图像如上所示:
单向扫描存在的问题
单向操作存在来回折返空行程问题,导致加工时间变长。
本文主要通过使用以下形式的代码,删除了多余的行程(空跑没任何意义的G0)。
while(++x < image.cols && image.at<std::uint8_t>(y, x) == 255) {length++;
}
--x;
实现了未优化版本和优化版本的单向扫描,两者加工时间从生成的GCode代码上,可以看出有了很大差异。
红色是 G0,绿色是加工部分 G1。
当然如果使用双向扫描方向,加工时间差异会更大。
灰度图像单向扫描代码示例
编译器要求最低 C++23
#pragma once
#include <opencv2/opencv.hpp>
#include <fstream>
#include <print>
#include <vector>
#include <optional>
#include <ranges>struct G0 {std::optional<float> x, y;std::optional<int> s;std::string toString() {std::string command = "G0";if(x.has_value()) {command += std::format(" X{:.3f}", x.value());}if(y.has_value()) {command += std::format(" Y{:.3f}", y.value());}if(s.has_value()) {command += std::format(" S{:d}", s.value());}return command;}explicit operator std::string() const {std::string command = "G0";if(x.has_value()) {command += std::format(" X{:.3f}", x.value());}if(y.has_value()) {command += std::format(" Y{:.3f}", y.value());}if(s.has_value()) {command += std::format(" S{:d}", s.value());}return command;}
};struct G1 {std::optional<float> x, y;std::optional<int> s;std::string toString() {std::string command = "G1";if(x.has_value()) {command += std::format(" X{:.3f}", x.value());}if(y.has_value()) {command += std::format(" Y{:.3f}", y.value());}if(s.has_value()) {command += std::format(" S{:d}", s.value());}return command;}explicit operator std::string() const {std::string command = "G1";if(x.has_value()) {command += std::format(" X{:.3f}", x.value());}if(y.has_value()) {command += std::format(" Y{:.3f}", y.value());}if(s.has_value()) {command += std::format(" S{:d}", s.value());}return command;}
};class ImageToGCode
{
public:// 激光模式enum class LaserMode {Cutting, // 切割 M3 Constant PowerEngraving, // 雕刻 M4 Dynamic Power};// 扫描方式enum class ScanMode {Unidirection, // 单向Bidirection, // 双向};struct kEnumToStringLaserMode {constexpr std::string_view operator[](const LaserMode mode) const noexcept {switch(mode) {case LaserMode::Cutting: return "M3";case LaserMode::Engraving: return "M4";}return {};}constexpr LaserMode operator[](const std::string_view mode) const noexcept {if(mode.compare("M3")) {return LaserMode::Cutting;}if(mode.compare("M4")) {return LaserMode::Engraving;}return {};}};ImageToGCode() = default;~ImageToGCode() = default;auto &setInputImage(const cv::Mat &mat) {this->mat = mat;return *this;}auto &setOutputTragetSize(double width, double height, double resolution = 10.0 /* lin/mm */) {this->width = width;this->height = height;this->resolution = resolution;return *this;}auto &builder() {command.clear();try {matToGCode();} catch(cv::Exception &e) {std::println("cv Exception {}", e.what());}std::vector<std::string> header;header.emplace_back("G17G21G90G54"); // XY平面;单位毫米;绝对坐标模式;选择G54坐标系header.emplace_back(std::format("F{:d}", 30000)); // 移动速度 毫米/每分钟header.emplace_back(std::format("G0 X{:.3f} Y{:.3f}", 0.f, 0.f)); // 设置工作起点及偏移header.emplace_back(std::format("{} S0", kEnumToStringLaserMode()[laserMode])); // 激光模式if(airPump.has_value()) {header.emplace_back(std::format("M16 S{:d}", 300)); // 打开气泵}std::vector<std::string> footer;footer.emplace_back("M5");if(airPump.has_value()) {footer.emplace_back("M9"); // 关闭气泵,保持 S300 功率}command.insert_range(command.begin(), header);command.append_range(footer);return *this;}bool exportGCode(const std::string &fileName) {std::fstream file;file.open(fileName, std::ios_base::out | std::ios_base::trunc);if(!file.is_open()) {return false;}for(auto &&v: command | std::views::transform([](auto item) { return item += "\n"; })) {file.write(v.c_str(), v.length());}return true;}auto setLaserMode(LaserMode mode) {laserMode = mode;return *this;}auto setScanMode(ScanMode mode) {scanMode = mode;return *this;}private:void matToGCode() {assert(mat.channels() == 1);assert(std::isgreaterequal(resolution, 1e-5f));assert(!((width * resolution < 1.0) || (height * resolution < 1.0)));unidirectionStrategy();}void internal(cv::Mat &image, auto x /*width*/, auto y /*height*/) {auto pixel = image.at<cv::uint8_t>(y, x);if(pixel == 255) {command.emplace_back(G0(x / resolution, y / resolution, std::nullopt));} else {auto power = static_cast<int>((1.0 - static_cast<double>(pixel) / 255.0) * 1000.0);command.emplace_back(G1(x / resolution, y / resolution, power));}}// 单向扫描// 未做任何优化处理,像素和G0、G1一一映射对应。void unidirectionStrategy() {cv::Mat image;cv::resize(mat, image, cv::Size(static_cast<int>(width * resolution), static_cast<int>(height * resolution)));cv::imshow("mat",image);cv::waitKey(0);for(int y = 0; y < image.rows; ++y) {command.emplace_back(G0(0, y / resolution, std::nullopt).toString());for(int x = 0; x < image.cols; ++x) {auto pixel = image.at<uchar>(y, x);if(pixel == 255) {command.emplace_back(G0(x / resolution, std::nullopt, std::nullopt));} else {auto power = static_cast<int>((1.0 - static_cast<double>(pixel) / 255.0) * 1000.0);command.emplace_back(G1(x / resolution, std::nullopt, power));}}}}// 单向扫描优化版本V1// 删除多余空行程,这里空行程指连续的无用的G0。void unidirectionOptStrategy() {cv::Mat image;cv::resize(mat, image, cv::Size(static_cast<int>(width * resolution), static_cast<int>(height * resolution)));int offset = 0; // The frist consecutive G0int length = 0;for(int y = 0; y < image.rows; ++y) {command.emplace_back(G0(offset / resolution, y / resolution, std::nullopt).toString());for(int x = 0; x < image.cols; ++x) {auto pixel = image.at<uchar>(y, x);length = 0;if(pixel == 255) {while(++x < image.cols && image.at<std::uint8_t>(y, x) == 255) {length++;}--x;// Whether continuous GO existsif(length) {if(x - length == 0) { // skip The frist consecutive G0offset = length;command.emplace_back(G0((x) / resolution, std::nullopt, std::nullopt));continue;}if(x == image.cols - 1) { // skip The last consecutive G0command.emplace_back(G0((x - length) / resolution, std::nullopt, std::nullopt));continue;}// Continuous GOcommand.emplace_back(G0(x / resolution, std::nullopt, std::nullopt));} else {// Independent GOcommand.emplace_back(G0(x / resolution, std::nullopt, std::nullopt));}} else {auto power = static_cast<int>((1.0 - static_cast<double>(pixel) / 255.0) * 1000.0);command.emplace_back(G1(x / resolution, std::nullopt, power));}}}}// Define additional strategy functions here
private:cv::Mat mat; // 灰度图像double width {0}; // 工作范围 x 轴double height {0}; // 工作范围 y 轴double resolution {0}; // 精度 lin/mmScanMode scanMode {ScanMode::Bidirection}; // 默认双向LaserMode laserMode {LaserMode::Engraving}; // 默认雕刻模式std::optional<int> airPump; // 自定义指令 气泵 用于吹走加工产生的灰尘 范围 [0,1000]// add more custom cmdstd::vector<std::string> command; // G 代码
};int main() {// 读取以灰度的形式读取一个图像cv::Mat mat = cv::imread(R"(ImageToGCode\image\tigger.jpg)", cv::IMREAD_GRAYSCALE);cv::flip(mat, mat, 0);// 实例化一个对象ImageToGCode handle;// 设置相关参数// setInputImage 输入图像// setOutputTragetSize 输出物理尺寸大小 以 mm 为单位,这里输出 50x50 mm 大小// builder 开始执行图像转GCode操作// exportGCode 导出 gcode 文件handle.setInputImage(mat).setOutputTragetSize(50,50).builder().exportGCode(R"(ImageToGCode\output\001.nc)");
}
结论
通过结合OpenCV和GCode,我们成功地将灰度图转换为机器可执行的指令,实现了对图像的单向扫描激光雕刻。这种方法可应用于数控机床和3D打印机等领域,为数字制造提供了更灵活的图像处理和加工方式。
相关文章:
基于OpenCV灰度图像转GCode的单向扫描实现
基于OpenCV灰度图像转GCode的单向扫描实现 引言单向扫描存在的问题灰度图像单向扫描代码示例结论 系列文章 ⭐深入理解G0和G1指令:C中的实现与激光雕刻应用⭐基于二值化图像转GCode的单向扫描实现⭐基于二值化图像转GCode的双向扫描实现⭐基于二值化图像转GCode的…...

JAVA生成Word文档
第一步:导入依赖 <!--生成word文档--> <dependency><groupId>com.deepoove</groupId><artifactId>poi-tl</artifactId><version>1.10.3</version> </dependency> <!--数字转为汉字大写--> <depend…...

python将.db数据库文件转成Excel文档
python实现.db数据库转Excel 程序实现 上一篇文章程序实现以下功能: 1.读取一个Excel文件,文件名通过函数传参数传入 2.将文件读取的内容保存到一个数据库文件中 3.数据库的文件名以传入的Excel文件的文件名命名 4.将excel文件的工作簿的名字作为数据库的表单名 5…...

[opencvsharp]C#基于Fast算法实现角点检测
角点检测算法有很多,比如Harris角点检测、Shi-Tomas算法、sift算法、SURF算法、ORB算法、BRIEF算法、Fast算法等,今天我们使用C#的opencvsharp库实现Fast角点检测 【算法介绍】 fast算法 Fast(全称Features from accelerated segment test)是一种用于角…...
群晖NAS开启FTP服务结合内网穿透实现公网远程访问本地服务
⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站。 文章目录 ⛳️ 推荐1. 群晖安装Cpolar2. 创建FTP公网地址3. 开启群晖FTP服务4. 群晖FTP远程连接5. 固定FTP公网地址6. 固定FTP…...

ReactNative实现弧形拖动条
我们直接看效果 先看下面的使用代码 <CircularSlider5step{2}min{0}max{100}radius{100}value{30}onComplete{(changeValue: number) > this.handleEmailSbp(changeValue)}onChange{(changeValue: number) > this.handleEmailDpd(changeValue)}contentContainerStyle{…...
STM32F407移植OpenHarmony笔记9
继上一篇笔记,已经完成liteos内核的基本功能适配。 今天尝试启动OHOS和XTS兼容性测试。 如何启动OHOS? OHOS系统初始化接口是OHOS_SystemInit(void),在内核初始化完成后,就能调用。 extern void OHOS_SystemInit(void); OHOS_Sys…...
telnet笔记
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、场景二、介绍1.测试端口2.访问百度3. 简单的爬虫 前言 最近telnet命令用的比较多,所以记录一下。 一、场景 ping应该是大家最常用的命令&…...
【考研408】操作系统笔记
文章目录 [toc] 计算机系统概述操作系统的基本概念操作系统的概念和特征操作系统的目标和功能(**处理器管理、存储器管理、设备管理、文件管理、向用户提供接口、扩充机器**) 操作系统的发展与分类操作系统的运行环境操作系统的运行机制 操作系统的体系结…...
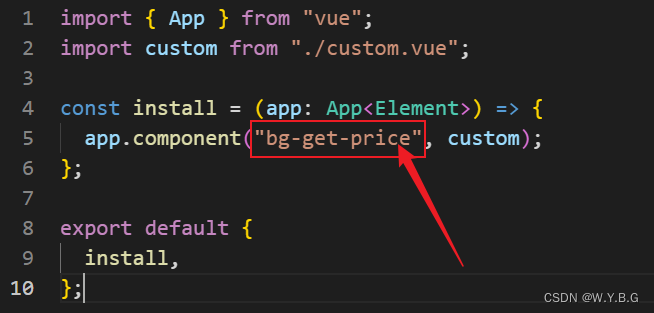
从0开始搭建、上传npm包
从0开始搭建、上传npm包 1、上传一个简单获取水果价格的包创建 vite 项目在项目根目录 src 文件夹中创建 index.ts 文件,文件内容如下:在 main.ts 文件中导入、导出上面创建的方法创建 vite.config.ts 配置文件,文件内容如下配置 package.jso…...

【Go】在 JSON 中解析 time.Duration
当解析 JSON 时,使用time.Duration可能是一个繁琐的过程,因为它需要在一秒的后面添加 9 个零(即 1000000000)。为了简化这个过程,我创建了一个名为 Duration 的新类型: type Duration time.Duration为了将…...
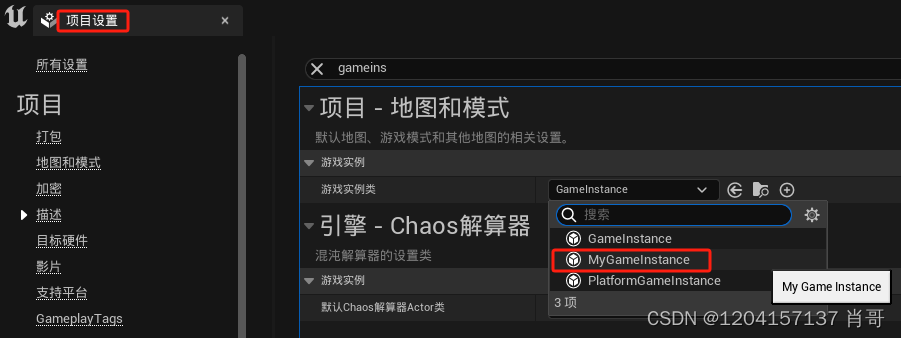
UE4 C++ UGameInstance实例化
1.创建GameInstance C类 2.在.h添加变量 class 工程名称_API UMyGameInstance : public UGameInstance {GENERATED_BODY()public: //定义了三个公开的变量UMyGameInstance();UPROPERTY(EditAnywhere, BlueprintReadWrite, Category "MyGameInstance")FString Name…...
在工业制造方面,如何更好地实现数字化转型?
实现工业制造的数字化转型涉及利用数字技术来增强流程、提高效率并推动创新。以下是工业制造领域更好实现数字化转型的几个关键步骤: 1.定义明确的目标: 清楚地概述您的数字化转型目标。确定需要改进的领域,例如运营效率、产品质量或供应链…...

【MySQL】-10 MySQL 存储过程
MySQL 存储过程 优点缺点一、存储过程的创建和调用创建存储过程实例1、in 输入参数2、out输出参数3、inout输入参数 三、变量1. 变量定义2. 变量赋值3. 用户变量 四、注释MySQL存储过程的调用MySQL存储过程的查询MySQL存储过程的修改MySQL存储过程的删除MySQL存储过程的控制语句…...

3.闭包 - JS
作用域 一般认为 JS 中作用域有三种: 全局作用域:一个脚本运行代码的默认作用域;模块作用域:一个模块运行代码的默认作用域;函数作用域:一个函数运行代码的默认作用域。 而由于 let/const 声明变量的作用…...
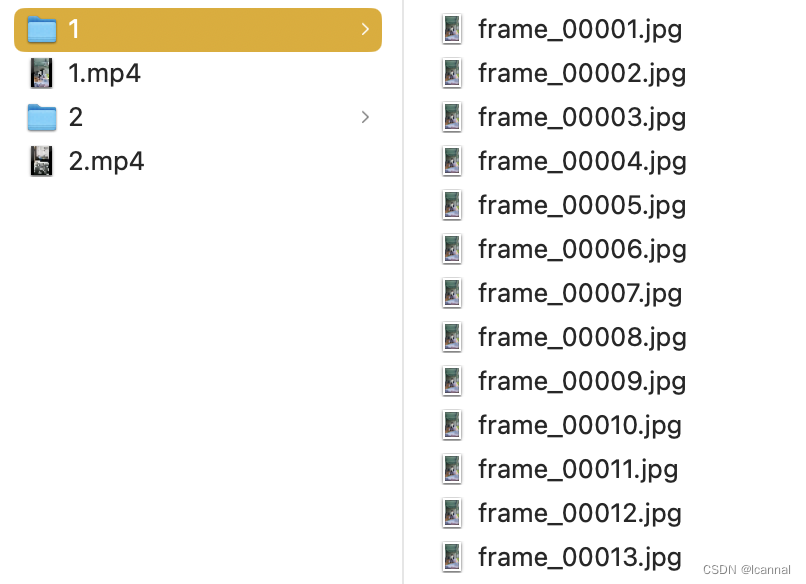
Java实现批量视频抽帧2.0
继上个版本 对其进行略微升级 🤓 上个版本仅对一个视频进行抽帧处理 此版本可对一个文件夹内的全部视频进行抽帧并对应的文件夹进行帧图片的保存 1️⃣配置pom.xml (保持上次不变) <dependencies><dependency><grou…...

MFC 原生LsitCtrl单元格嵌入图标
// ListItemInsertIconDlg.h: 头文件 //#pragma once// CListItemInsertIconDlg 对话框 class CListItemInsertIconDlg : public CDialogEx { // 构造 public:CListItemInsertIconDlg(CWnd* pParent nullptr); // 标准构造函数// 对话框数据 #ifdef AFX_DESIGN_TIMEenum { IDD…...
黑马头条 - minio
我是南城余!阿里云开发者平台专家博士证书获得者! 欢迎关注我的博客!一同成长! 一名从事运维开发的worker,记录分享学习。 专注于AI,运维开发,windows Linux 系统领域的分享! 知…...

认识Tomcat (一)
认识Tomcat (一) 一、服务器 1.1 服务器简介 硬件服务器的构成与一般的PC比较相似,但是服务器在稳定性、安全性、性能等方面都要求更高,因为CPU、芯片组、内存、磁盘系统、网络等硬件和普通PC有所不同。 软件服务器&…...

SSH免密切换服务器案例-ssh协议(公钥和私钥)
公钥和私钥理解 公钥提供加密,私钥解密,公钥可以共享,私钥不可以。举例公钥相当于锁头,可以给别人用,钥匙相当于私钥,只能开自己发出去的锁头,也就是私钥和公钥成对,私钥只能解密对…...

终极指南:如何用LocalVocal为OBS添加本地实时字幕系统
终极指南:如何用LocalVocal为OBS添加本地实时字幕系统 【免费下载链接】obs-localvocal OBS plugin for local speech recognition and captioning using AI 项目地址: https://gitcode.com/gh_mirrors/ob/obs-localvocal 还在为直播或视频录制中的字幕问题烦…...

万兆光模块:网络提速的核心引擎
在数字化转型的浪潮中,数据已成为核心生产要素,而连接数据的网络,则是决定其流动速度与效率的关键。当我们沉浸在4K/8K的视觉盛宴中,惊叹于云游戏的即时交互,或是受益于远程医疗的精准诊断时,背后都离不开一…...

Qwen3-14B私有化部署指南:基于RTX 4090D的GPU算力优化全流程
Qwen3-14B私有化部署指南:基于RTX 4090D的GPU算力优化全流程 1. 镜像概述与核心优势 Qwen3-14B是通义千问推出的大语言模型,具备强大的对话、推理和生成能力。本镜像针对RTX 4090D显卡进行了深度优化,解决了大模型私有化部署中的三大痛点&a…...

无障碍技术实践:OpenClaw+Phi-3-vision-128k-instruct构建语音图文助手
无障碍技术实践:OpenClawPhi-3-vision-128k-instruct构建语音图文助手 1. 项目背景与动机 去年夏天,我在一次志愿者活动中遇到几位视障开发者。他们提到日常工作中最大的障碍不是编程本身,而是无法快速获取图像信息和处理文档内容。这让我开…...

FreeCAD钣金实战:从零到一,用SheetMetal工作台搞定Z型固定片设计与展开
1. 钣金设计与FreeCAD SheetMetal工作台入门 钣金件在机械设计中无处不在,从机箱外壳到支架固定片,几乎每个DIY项目都会用到。传统手工绘制展开图既耗时又容易出错,而FreeCAD的SheetMetal工作台让这个过程变得直观高效。最近我在改造工作室铝…...

Step3-VL-10B多场景落地指南:从OCR到数学推理的10个高频使用模板
Step3-VL-10B多场景落地指南:从OCR到数学推理的10个高频使用模板 你是不是也遇到过这样的问题?面对一张图片,想提取里面的文字,得去找专门的OCR工具;想分析图片内容,得用图像识别软件;要是图片…...

NaViL-9B开源模型GPU适配详解:eager注意力回退机制原理与影响
NaViL-9B开源模型GPU适配详解:eager注意力回退机制原理与影响 1. 模型概述与技术背景 NaViL-9B是由国内顶尖研究机构发布的开源多模态大语言模型,具备同时处理文本和图像输入的能力。作为原生多模态架构的代表,该模型在9B参数规模下实现了高…...

bert-base-chinese新手必看:完形填空与语义相似度功能实测教程
bert-base-chinese新手必看:完形填空与语义相似度功能实测教程 1. 快速了解bert-base-chinese bert-base-chinese是Google发布的经典中文预训练模型,作为NLP领域的基础模型,它已经成为中文自然语言处理任务的标准选择之一。这个模型特别适合…...

忍者像素绘卷惊艳作品集:16-Bit复古美学+火之意志主题像素艺术展
忍者像素绘卷惊艳作品集:16-Bit复古美学火之意志主题像素艺术展 1. 像素艺术的革命性突破 忍者像素绘卷代表了当前像素艺术生成技术的巅峰之作。这款基于Z-Image-Turbo深度优化的图像生成工作站,成功将传统忍者文化与现代AI技术完美融合,创…...

qt模块学习记录
qt模块学习记录一、Qt Core其他模块都用到的核心非图形类二、Qt GUI 设计 GUI 界面的基础类,包括 OpenGL三、功能模块Qt Network 使网络编程更简单和轻便的类Qt SQL 使用 SQL 用于数据库操作的类Qt Multimedia 音频、视频、摄像头和广播功能的类四、老式界面Qt Widg…...