freertos 源码分析四 任务创建的简单分析
任务创建xTaskCreate
为TCB和TCB栈分配空间, 初始化,加入就绪任务链表
#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )BaseType_t xTaskCreate( TaskFunction_t pxTaskCode,const char * const pcName,const configSTACK_DEPTH_TYPE usStackDepth,void * const pvParameters,UBaseType_t uxPriority,TaskHandle_t * const pxCreatedTask ){ TCB_t * pxNewTCB;BaseType_t xReturn;#if ( portSTACK_GROWTH > 0 ){pxNewTCB = ( TCB_t * ) pvPortMalloc( sizeof( TCB_t ) ); if( pxNewTCB != NULL ){memset( ( void * ) pxNewTCB, 0x00, sizeof( TCB_t ) ); pxNewTCB->pxStack = ( StackType_t * ) pvPortMallocStack( ( ( ( size_t ) usStackDepth ) * sizeof( StackType_t ) ) ); if( pxNewTCB->pxStack == NULL ){vPortFree( pxNewTCB );pxNewTCB = NULL;}}}#else{StackType_t * pxStack;pxStack = pvPortMallocStack( ( ( ( size_t ) usStackDepth ) * sizeof( StackType_t ) ) );if( pxStack != NULL ){pxNewTCB = ( TCB_t * ) pvPortMalloc( sizeof( TCB_t ) ); if( pxNewTCB != NULL ){memset( ( void * ) pxNewTCB, 0x00, sizeof( TCB_t ) );pxNewTCB->pxStack = pxStack;}else{vPortFreeStack( pxStack );}}else{pxNewTCB = NULL;}}#endifif( pxNewTCB != NULL ){#if ( tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE != 0 ){pxNewTCB->ucStaticallyAllocated = tskDYNAMICALLY_ALLOCATED_STACK_AND_TCB;}#endifprvInitialiseNewTask( pxTaskCode, pcName, ( uint32_t ) usStackDepth, pvParameters, uxPriority, pxCreatedTask, pxNewTCB, NULL );prvAddNewTaskToReadyList( pxNewTCB );xReturn = pdPASS;}else{xReturn = errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY;}return xReturn;}
#endif
TCB初始化
设置栈顶栈底,任务名,优先级,初始化及填充状态消息表项。
static void prvInitialiseNewTask( TaskFunction_t pxTaskCode,const char * const pcName,const uint32_t ulStackDepth, void * const pvParameters,UBaseType_t uxPriority,TaskHandle_t * const pxCreatedTask,TCB_t * pxNewTCB,const MemoryRegion_t * const xRegions )
{StackType_t * pxTopOfStack;UBaseType_t x;#if ( portSTACK_GROWTH < 0 ){pxTopOfStack = &( pxNewTCB->pxStack[ ulStackDepth - ( uint32_t ) 1 ] );pxTopOfStack = ( StackType_t * ) ( ( ( portPOINTER_SIZE_TYPE ) pxTopOfStack ) & ( ~( ( portPOINTER_SIZE_TYPE ) portBYTE_ALIGNMENT_MASK ) ) ); configASSERT( ( ( ( portPOINTER_SIZE_TYPE ) pxTopOfStack & ( portPOINTER_SIZE_TYPE ) portBYTE_ALIGNMENT_MASK ) == 0UL ) );#if ( configRECORD_STACK_HIGH_ADDRESS == 1 ){pxNewTCB->pxEndOfStack = pxTopOfStack;}#endif}#else{pxTopOfStack = pxNewTCB->pxStack;configASSERT( ( ( ( portPOINTER_SIZE_TYPE ) pxNewTCB->pxStack & ( portPOINTER_SIZE_TYPE ) portBYTE_ALIGNMENT_MASK ) == 0UL ) );pxNewTCB->pxEndOfStack = pxNewTCB->pxStack + ( ulStackDepth - ( uint32_t ) 1 );}#endifif( pcName != NULL ){for( x = ( UBaseType_t ) 0; x < ( UBaseType_t ) configMAX_TASK_NAME_LEN; x++ ){pxNewTCB->pcTaskName[ x ] = pcName[ x ];if( pcName[ x ] == ( char ) 0x00 ){break;}}pxNewTCB->pcTaskName[ configMAX_TASK_NAME_LEN - 1 ] = '\0';}configASSERT( uxPriority < configMAX_PRIORITIES );if( uxPriority >= ( UBaseType_t ) configMAX_PRIORITIES ) {uxPriority = ( UBaseType_t ) configMAX_PRIORITIES - ( UBaseType_t ) 1U;}pxNewTCB->uxPriority = uxPriority;#if ( configUSE_MUTEXES == 1 ){pxNewTCB->uxBasePriority = uxPriority;}#endifvListInitialiseItem( &( pxNewTCB->xStateListItem ) );vListInitialiseItem( &( pxNewTCB->xEventListItem ) );listSET_LIST_ITEM_OWNER( &( pxNewTCB->xStateListItem ), pxNewTCB );listSET_LIST_ITEM_VALUE( &( pxNewTCB->xEventListItem ), ( TickType_t ) configMAX_PRIORITIES - ( TickType_t ) uxPriority );listSET_LIST_ITEM_OWNER( &( pxNewTCB->xEventListItem ), pxNewTCB );if( pxCreatedTask != NULL ){*pxCreatedTask = ( TaskHandle_t ) pxNewTCB;}}
加入就绪态链表 禁中断 任务数加一,设为当前,开中断
static void prvAddNewTaskToReadyList( TCB_t * pxNewTCB )
{taskENTER_CRITICAL(); {uxCurrentNumberOfTasks++;if( pxCurrentTCB == NULL ){pxCurrentTCB = pxNewTCB;if( uxCurrentNumberOfTasks == ( UBaseType_t ) 1 ){prvInitialiseTaskLists();}}else{if( xSchedulerRunning == pdFALSE ){if( pxCurrentTCB->uxPriority <= pxNewTCB->uxPriority ){pxCurrentTCB = pxNewTCB;}}}uxTaskNumber++;prvAddTaskToReadyList( pxNewTCB );}taskEXIT_CRITICAL();if( xSchedulerRunning != pdFALSE ){if( pxCurrentTCB->uxPriority < pxNewTCB->uxPriority ){taskYIELD_IF_USING_PREEMPTION();}}
}
若是uxCurrentNumberOfTasks 为1,即第一个任务,初始化各链表
static void prvInitialiseTaskLists( void )
{UBaseType_t uxPriority;for( uxPriority = ( UBaseType_t ) 0U; uxPriority < ( UBaseType_t ) configMAX_PRIORITIES; uxPriority++ ){vListInitialise( &( pxReadyTasksLists[ uxPriority ] ) );}vListInitialise( &xDelayedTaskList1 );vListInitialise( &xDelayedTaskList2 );vListInitialise( &xPendingReadyList );#if ( INCLUDE_vTaskDelete == 1 ){vListInitialise( &xTasksWaitingTermination );}#endif#if ( INCLUDE_vTaskSuspend == 1 ){vListInitialise( &xSuspendedTaskList );}#endifpxDelayedTaskList = &xDelayedTaskList1;pxOverflowDelayedTaskList = &xDelayedTaskList2;
}
prvAddTaskToReadyList宏定义
#define prvAddTaskToReadyList( pxTCB ) \traceMOVED_TASK_TO_READY_STATE( pxTCB ); \taskRECORD_READY_PRIORITY( ( pxTCB )->uxPriority ); \listINSERT_END( &( pxReadyTasksLists[ ( pxTCB )->uxPriority ] ), &( ( pxTCB )->xStateListItem ) ); \tracePOST_MOVED_TASK_TO_READY_STATE( pxTCB )
记录最高优先级
#define taskRECORD_READY_PRIORITY( uxPriority ) \
{ \if( ( uxPriority ) > uxTopReadyPriority ) \{ \uxTopReadyPriority = ( uxPriority ); \} \
}
listINSERT_END 加入链表
taskYIELD_IF_USING_PREEMPTION 定义
#if ( configUSE_PREEMPTION == 0 )#define taskYIELD_IF_USING_PREEMPTION()
#else#define taskYIELD_IF_USING_PREEMPTION() portYIELD_WITHIN_API()
#endif#ifndef portYIELD_WITHIN_API#define portYIELD_WITHIN_API portYIELD
#endif
stm32对应portYIELD 定义 适配不同定义不同
#define portYIELD()|| | | | __asm volatile ( "SWI 0" )
相关文章:

freertos 源码分析四 任务创建的简单分析
任务创建xTaskCreate 为TCB和TCB栈分配空间, 初始化,加入就绪任务链表 #if ( configSUPPORT_DYNAMIC_ALLOCATION 1 )BaseType_t xTaskCreate( TaskFunction_t pxTaskCode,const char * const pcName,const configSTACK_DEPTH_TYPE usStackDepth,void *…...

二叉树的锯齿形遍历,力扣
目录 题目: 我们直接看题解吧: 快速理解解题思路小建议: 解题方法: 相似题目对比分析: 解题分析: 解题思路: 补充说明: 思路优化: 代码实现(层序遍历倒序): 题…...

避免Arrays.asList陷阱:优雅处理结构性修改的方法
临近年终,项目交付排期比较紧张,导致很多时候,Code Review 往往是走马观花,没有严格执行。最近,一个实习生就产生了一个十分低级的代码BUG。笔者感觉这个问题,对于实习生,尤其是刚入职的 应届 J…...

微信小程序(三十六)事件传参
注释很详细,直接上代码 上一篇 新增内容: 1.传参步骤 2.传参接收解构步骤 源码: index.wxml <button type"primary" bind:tap"onclick" mark:index"{{0}}" mark:remb"{{1}}" class"But&quo…...
编译原理与技术(三)——语法分析(二)自顶向下-递归下降
一、语法分析的两种方法 自顶向下(Top-down): 针对输入串,从文法的开始符号出发,尝试根据产生式规则推导(derive)出该输入串。 从根部开始构造语法树。 自底向上(Bottom-up&#…...
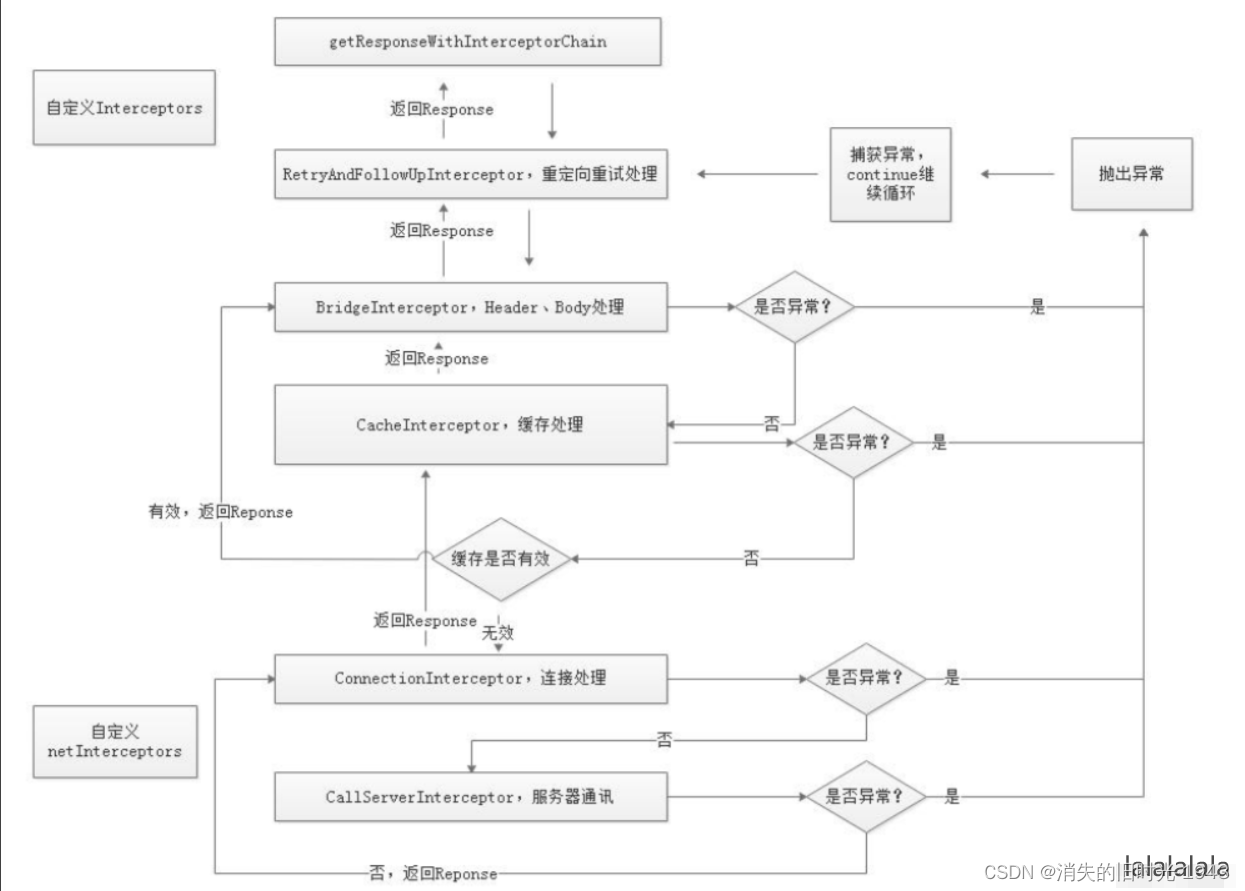
okhttp 的 拦截器
拦截器有很多作用,实现就是责任链模式,细节,等我有时间补上。 后面有时间更新一下。 OkHttp最核心的工作是在 getResponseWithInterceptorChain() 中进行,在进入这个方法分析之前,我们先来了 解什么是责任链模式&…...

Android:多线程下载网络图片
3.12 网络图片操作 1、通过URL请求获取网络图片 示例: 创建t_picture.xml,页面layout布局文件,一个Button按钮和一个ImageView容器显示图片。 <?xml version="1.0" encoding="utf-8"?><LinearLayout xmlns:android="http://schemas.a…...

跟着GPT学设计模式之原型模式
如果对象的创建成本比较大,而同一个类的不同对象之间差别不大(大部分字段都相同),在这种情况下,我们可以利用对已有对象(原型)进行复制(或者叫拷贝)的方式来创建新对象&a…...
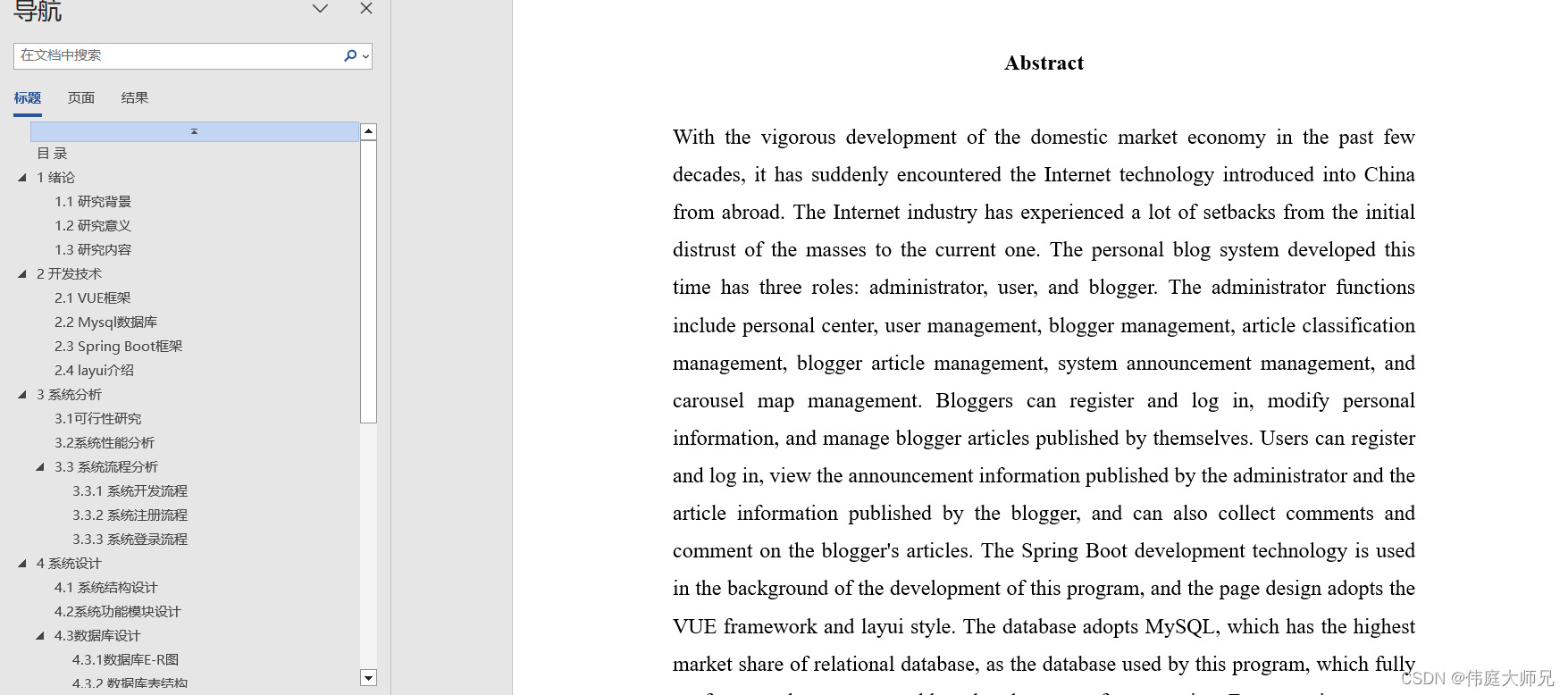
博客|基于Springboot的个人博客系统设计与实现(源码+数据库+文档)
个人博客系统目录 目录 基于Springboot的个人博客系统设计与实现 一、前言 二、系统功能设计 三、系统实现 1、管理员功能实现 (1)用户管理 (2)文章分类管理 (3)公告信息管理 (4&#…...
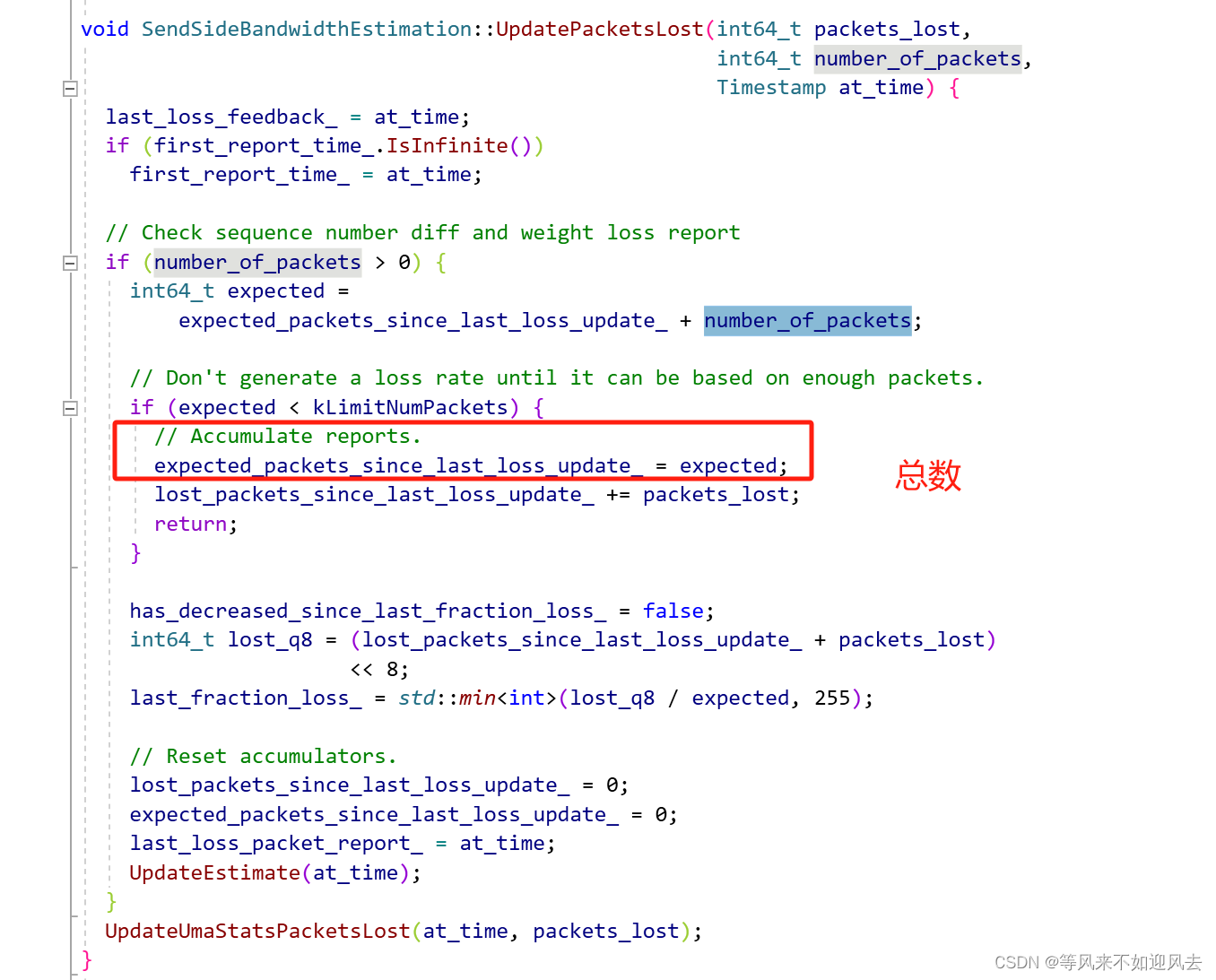
【gcc】webrtc发送侧计算 丢包率
大神的分析 : 提到: 每当收到cc-feedback或者收到RR-report的时候就能统计出丢包率,在cc-controller中就会调用SendSideBandwidthEstimation::UpdatePacketsLost()去更新丢包率,同时进行码率预估 G:\CDN\rtcCli\m98\src\modules\congestion_controller\goog_cc\send_side_b…...

elementui上传文件不允许重名
需求: 用户可以多文件上传 ,在上传到服务器之前需要检查服务器中有无重名的文件,如果有会返回重名文件的名称数组,这些文件需要一个一个的向用户确认是否要覆盖重传。确认完毕后再上传到服务器。 检查文件重名: //上传…...

鸿蒙(HarmonyOS)项目方舟框架(ArkUI)之Video媒体组件
鸿蒙(HarmonyOS)项目方舟框架(ArkUI)之Video媒体组件 一、操作环境 操作系统: Windows 10 专业版、IDE:DevEco Studio 3.1、SDK:HarmonyOS 3.1 二、Video媒体组件 用于播放视频文件并控制其播放状态的组件。 子组件 无 接口…...

Linux操作系统运维-Docker的基础知识梳理总结
Linux操作系统运维-Docker的基础知识梳理总结 docker用来解决不同开发人员软件调试时环境不统一的问题,保证了程序调试时运行环境的一致性。docker的设计理念便是一处镜像,处处运行,即通过产生用户软件,运行环境及其运行配置的统一…...

PMP考试成绩如何查询?
PMP考试成绩已经陆续出来了,出成绩时间大概一周左右,没收到的别着急,先把如何查询成绩路径弄清楚。 【如何查询成绩】 1、输入网址(PMI官网,不知道网址的私戳),点击 Log In 如果忘记 PMI 的账…...

【Scala】 2. 函数
2. 函数 scala运算符、if … else …两部分和C语言类型,这里不再赘述,这里从for循环开始讲讲scala和c/c的不同之处。 2.1 for循环 scala中主要包含to和until两个关键字,下面分别看看两者的用法,看例子就行了。 (1) to的用法 …...
14.0 Zookeeper环球锁实现原理
全局锁是控制全局系统之间同步访问共享资源的一种方式。 下面介绍zookeeper如何实现全民锁,讲解他锁和共享锁两类全民锁。 排他锁 排他锁(Exclusive Locks),又被称为写锁或独占锁,如果事务T1对数据对象O1加上排他锁…...

课时16:本地变量_普通变量
2.2.2 普通变量 学习目标 这一节,我们从 基础知识、简单实践、小结 三个方面来学习。 基础知识 变量分类 所谓的本地变量就是:在当前系统的某个环境下才能生效的变量,作用范围小。本地变量按照变量值的生成方式包含两种:普通…...
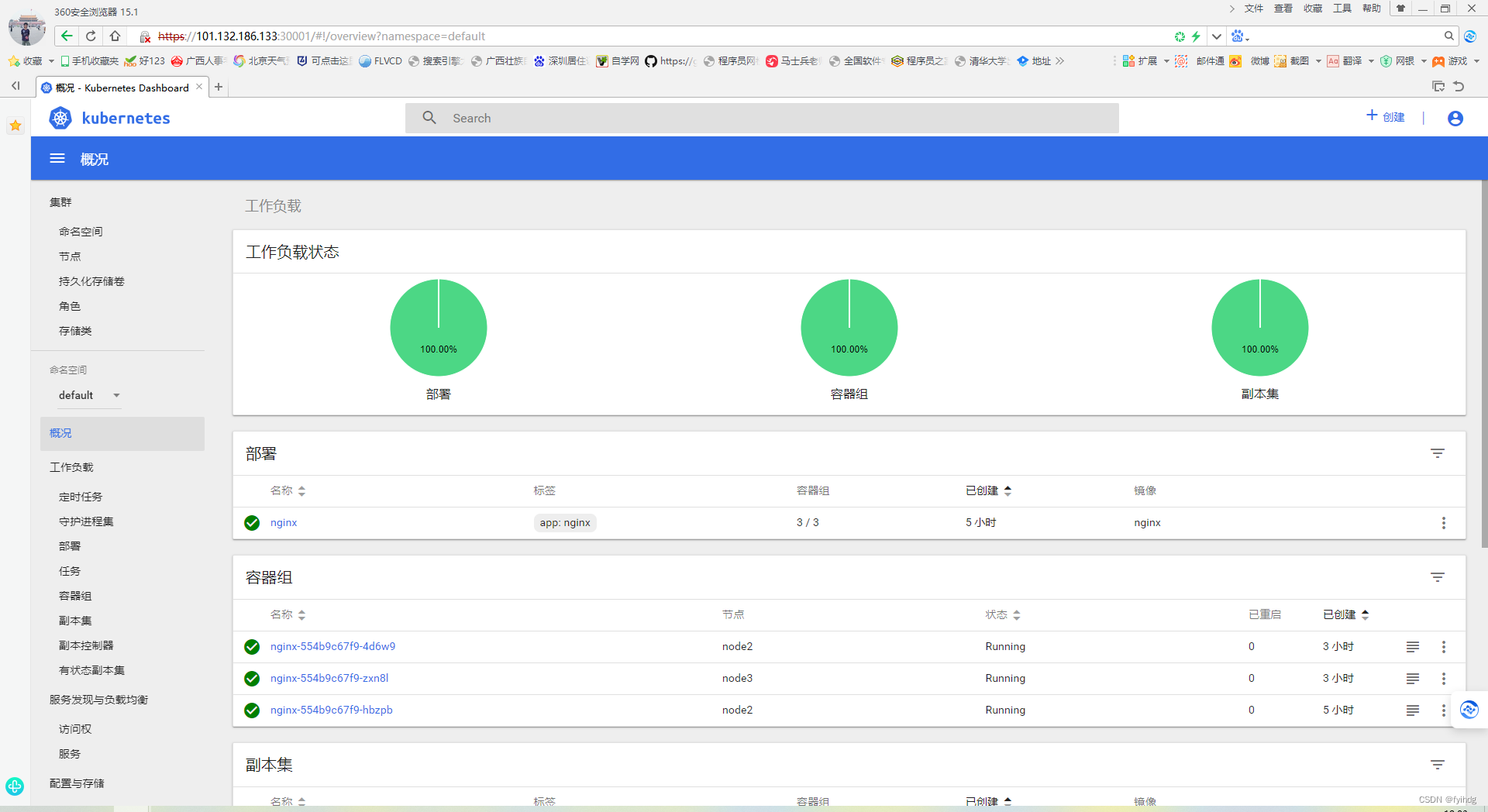
阿里云服务器centos_7_9_x64位,3台,搭建k8s集群
目录 1.环境信息 2.搭建过程 2.1 安装Docker源 2.2 安装Docker 2.3 安装kubeadm,kubelet和kubectl 2.4 部署Kubernetes Master(node1) 2.5 安装Pod网络插件(CNI) 2.6 加入Kubernetes Node 2.7 测试kubernetes集群 3.部署 Dashboard…...

代码随想录第二十八天
第七章 回溯算法part04 ● 93.复原IP地址 ● 78.子集 ● 90.子集II 详细布置 93.复原IP地址 本期本来是很有难度的,不过 大家做完 分割回文串 之后,本题就容易很多了 题目链接/文章讲解:https://programmercarl.com/0093.%E5…...

【python】绘制爱心图案
以下是一个简单的Python代码示例,它使用turtle模块绘制一个代表爱和情人节的心形图案。 首先,请确保计算机上安装了Python和turtle模块。然后,将以下代码保存到一个.py文件中,运行它就可以看到爱心图案的绘制过程。 import turt…...

Windows远程桌面多用户协作解决方案:从原理到实践
Windows远程桌面多用户协作解决方案:从原理到实践 【免费下载链接】rdpwrap.ini RDPWrap.ini for RDP Wrapper Library by StasM 项目地址: https://gitcode.com/GitHub_Trending/rd/rdpwrap.ini 问题溯源:远程协作的瓶颈与突破 当团队成员需要同…...

高效清理重复文件:三步释放50GB存储空间的智能解决方案
高效清理重复文件:三步释放50GB存储空间的智能解决方案 【免费下载链接】czkawka 一款跨平台的重复文件查找工具,可用于清理硬盘中的重复文件、相似图片、零字节文件等。它以高效、易用为特点,帮助用户释放存储空间。 项目地址: https://gi…...
自动摘要与校对)
利用Cosmos-Reason1-7B进行技术文档(LaTeX/Markdown)自动摘要与校对
利用Cosmos-Reason1-7B进行技术文档(LaTeX/Markdown)自动摘要与校对 你有没有过这样的经历?面对一份几十页的技术论文或者一份复杂的实验报告,光是通读一遍就要花掉大半天时间。更别提还要从中提炼核心观点,或者逐字逐…...

Grok-1开源项目终极指南:从入门到精通完整教程
Grok-1开源项目终极指南:从入门到精通完整教程 【免费下载链接】grok-1 马斯克旗下xAI组织开源的Grok AI项目的代码仓库镜像,此次开源的Grok-1是一个3140亿参数的混合专家模型 项目地址: https://gitcode.com/GitHub_Trending/gr/grok-1 想要体验…...
SunnyUI中UIAvatar的进阶应用与自定义配置
1. UIAvatar控件基础回顾与核心属性解析 在SunnyUI这个强大的WinForms控件库中,UIAvatar可以说是用户界面设计的"门面担当"。它专门用于展示用户头像、品牌标识或者任何需要圆形/圆角矩形展示的图形元素。虽然基础使用很简单,但很多人可能只停…...

AtlasOS终极指南:专业解决Windows安装错误2502/2503的完整方案
AtlasOS终极指南:专业解决Windows安装错误2502/2503的完整方案 【免费下载链接】Atlas 🚀 An open and lightweight modification to Windows, designed to optimize performance, privacy and security. 项目地址: https://gitcode.com/GitHub_Trendi…...

C++ 异常安全的最佳策略
C 异常安全的最佳策略 在C开发中,异常安全是确保程序在抛出异常时仍能保持正确性和资源管理的关键。异常处理不当可能导致内存泄漏、数据不一致或资源未释放等问题。本文将探讨C异常安全的最佳策略,帮助开发者编写更健壮的代码。 资源管理:…...

从零开始:用CJQT构建跨平台数据可视化应用的入门教程
从零开始:用CJQT构建跨平台数据可视化应用的入门教程 【免费下载链接】CJQT 仓颉语言对qt封装库 项目地址: https://gitcode.com/Cangjie-TPC/CJQT 你是否在寻找一个能让数据可视化开发变得简单的开源框架?是否因复杂的跨平台适配问题而束手无策&…...
)
Cesium实战:手把手教你实现智慧城市中的动态流动线(附完整代码与避坑指南)
Cesium实战:打造智慧城市动态流动线的完整技术方案 在数字孪生和智慧城市可视化项目中,动态流动线是实现交通流、管网流向等动态效果的关键元素。本文将深入探讨如何基于Cesium引擎,从Shader编写到前端集成,构建高性能的动态线可视…...

突破性Unity游戏插件框架实战指南:BepInEx从零到精通的完全手册
突破性Unity游戏插件框架实战指南:BepInEx从零到精通的完全手册 【免费下载链接】BepInEx Unity / XNA game patcher and plugin framework 项目地址: https://gitcode.com/GitHub_Trending/be/BepInEx BepInEx是一款专为Unity游戏设计的革命性插件框架&…...