论文阅读:Learning Lens Blur Fields
这篇文章是对镜头模糊场进行表征学习的研究,镜头的模糊场也就是镜头的 PSF 分布,镜头的 PSF 与物距,焦距,光学系统本身的像差都有关系,实际的 PSF 分布是非常复杂而且数量也很多,这篇文章提出用一个神经网络 MLP 来进行表征学习,相当于将镜头的 PSF 分布都压缩在了一个神经网络模型里面。
Abstract
光学模糊是光学镜头的固有性质,因为实际镜头都存在各种各样的像差,光学模糊与物距,焦距,入射光线的波长都有关系。光学镜头的表现可以用点扩散函数,也就是 PSF 来表示,实际镜头的 PSF 场非常复杂。这篇文章提出一种标定的方法,来构建这样一个实际光学镜头的 PSF 场,然后设计了一个高维的神经表征来学习这个 PSF 场。文章中用 MLP 来建模这个神经表征,这个镜头模糊场,可以准确地获得镜头在成像面的不同成像位置,不同对焦设置以及不同深度下的 PSF;这些不同的 PSF 都可以表示成与 sensor 有关的一个函数。这个神经网络的表征,同时考虑了镜头的离焦,衍射效应,以及各种像差,同时也考虑了特定 sensor 的性质,比如 color filters 以及与 pixel 有关的 micro lens。为了学习实际摄像模组的模糊场,文章将此形式化成一般的非盲反卷积问题,通过一批少量的实采数据构成的 focal stack,直接训练这个 MLP 网络结构。同时文章也构建了第一个与镜头模糊场相关的数据集,而且这个数据集是一个 5 维的模糊场的数据集。这套方法,可以很方便地快速迁移到不同的镜头模组上。
Introduction
一个实际的光学成像系统,需要考虑到镜头的离焦,像差,以及衍射效应等,如何精确地刻画这些性质对成像系统的影响,是一个非常大挑战,而且这个问题随着自动驾驶,以及手机摄影的兴起,也已经变得越来越重要了。
光学模糊一般是用 PSF 来刻画,PSF 也叫点扩散函数,表示的是一个理想点光源通过镜头到达 sensor 像面上的能量分布,真实光学系统的 PSF 建模是一个非常挑战的问题,因为 PSF 与很多因素包括光源,物距,焦距设置,波长等都有关系。
目前 PSF 的表示有三种方法,参数法,非参数法,以及基于几何或者傅里叶光学的模拟方法:
- 参数法,基于理想的镜头或者成像模型来表示 PSF,比如基于高斯分布,泽尼克系数,塞德尔系数等方式,这类方法的表示能力有限
- 非参数法,一般是通过对 sensor 像面进行一系列的采样来估计 PSF,这类方法需要通过反卷积的方法来求解出当前光学系统的 PSF,或者通过设置一个点光源,逐步扫描的方式,获取 sensor 像面上每个位置的 PSF,这类方法相对来说会更为准确,但是效率比较低
- 模拟法,是通过将光学系统进行物理成像模拟,仿真得到光学系统的 PSF,这类方法需要真实的光学系统参数,有的时候,实际的光学设备很难获取到这些参数
上面这些方法,估计出来的 PSF 都是独立存在的,有多少个 PSF,就需要存多少个 PSF,本文的一个创新点还在于把整个 PSF 的空间分布,用一个更加紧凑的神经网络来表示。文章中用的是 MLP,一个非常经典的神经网络,神经网络的拟合能力已经是众所周知的强大,可以拟合非常连续的 PSF 分布,以及非常复杂的 PSF 的形态,为了训练这样一个 MLP, 也需要构建相应的数据集,所以文章也提出了一种高效地构建 PSF 数据集的方法,所以总得来说,文章的主要创新有两点:
- 实际成像系统的 PSF 分布的标定与构建,文章提出了一种方法,可以对不同的成像设备,包括手机,单反都能进行 PSF 的标定与估计
- 利用神经网络 MLP 对镜头模糊场 PSF 的分布进行拟合,形成一个更加紧凑的镜头模糊场的表示

Learning lens blur fields
文章整个的 pipeline 如下所示:

Lens Blur Field Representation
假设真实环境中有一个点光源 p ∈ R 3 \mathbf{p} \in \mathbb{R}^{3} p∈R3 距离镜头为 d d d,通过透视投影,点光源从三维空间投影到二维的相机平面,投影后的坐标为 x ~ ∈ R 2 \tilde{\mathbf{x}} \in \mathbb{R}^{2} x~∈R2,然后通过镜头的内参,最后转换到图像平面,其坐标为 x ∈ R 2 {\mathbf{x}} \in \mathbb{R}^{2} x∈R2,从三维空间投影到二维图像平面,与镜头的焦距 f f f,成像的物距 d d d 以及sensor 的类型 c c c 有关,dual-pixel 类型的 sensor 会有一个视差,最终的图像坐标与三维空间坐标的映射关系可以表示成如下所示:
x = invproj ( x , d , f , c ) (1) \mathbf{x} = \text{invproj}(\mathbf{x}, d, f, c) \tag{1} x=invproj(x,d,f,c)(1)
整个镜头的模糊场,表示为 PSF θ ( x , d , f , u ) \text{PSF}_{\theta}(\mathbf{x}, d, f, \mathbf{u}) PSFθ(x,d,f,u),其中 θ \theta θ 表示神经网络 MLP 的参数, PSF θ ( x , d , f , u ) \text{PSF}_{\theta}(\mathbf{x}, d, f, \mathbf{u}) PSFθ(x,d,f,u) 描述的是距离点光源 p \mathbf{p} p 在像面的投影 x \mathbf{x} x 为 u \mathbf{u} u 的范围内的能量分布,或者说理想点光源模糊成什么样子。其中的 c c c 表示与 sensor 类型相关,或者说与 PSF 的形态相关的参数,对于普通的 Bayer 模式的 sensor, c c c 是 4,对于黑白 sensor 来说, c c c 是 1,对于带 dual-pixel 类型的 sensor 来说,需要在原来的基础上乘以 2
Continuous Image Formation
假设镜头对距离其为 d d d 的一个平面成像,如果是理想成像,那就是没有模糊的成像
I ^ ( c ) ( x , d , f ) = A ( c ) ( p ) E ( c ) ( p , f ) (2) \hat{I}^{(c)}(\mathbf{x}, d, f) = A^{(c)}(\mathbf{p}) E^{(c)} (\mathbf{p}, f) \tag{2} I^(c)(x,d,f)=A(c)(p)E(c)(p,f)(2)
其中, A ( c ) ( p ) A^{(c)}(\mathbf{p}) A(c)(p) 表示真实平面的光照性质,体现了真实的环境光照与平面材质相互作用下的光照性质, E ( c ) ( p , f ) E^{(c)} (\mathbf{p}, f) E(c)(p,f) 表示能量效率,最终实际的模糊图像可以由如下的表达式表示:
I ( c ) ( x , d , f ) = ∫ μ PSF θ ( x , d , f , u ) ⋅ I ^ ( c ) ( x − u , d , f ) d u (3) {I}^{(c)}(\mathbf{x}, d, f) = \int_{\mathbf{\mu}} \text{PSF}_{\theta}(\mathbf{x}, d, f, \mathbf{u}) \cdot \hat{I}^{(c)}(\mathbf{x}-\mathbf{u}, d, f)d\mathbf{u} \tag{3} I(c)(x,d,f)=∫μPSFθ(x,d,f,u)⋅I^(c)(x−u,d,f)du(3)
u \mathbf{u} u 表示 x \mathbf{x} x 的一个邻域范围。
为了能够学习这个模糊场的神经表示,可以构建如下的损失函数:
arg min θ ∑ t , c , i ; x ∈ P ∥ I ( c ) ( x , d i , f i ) − ∑ u PSF θ ( c ) ( x , d i , f i , u ) ⋅ I ^ t ( c ) ( x − u , d i , f i ) ∥ 2 2 (4) \argmin_{\theta} \sum_{t,c,i; \mathbf{x}\in \mathcal{P}} \left \| {I}^{(c)}(\mathbf{x}, d_{i}, f_{i}) - \sum_{\mathbf{u}} \text{PSF}_{\theta}^{(c)}(\mathbf{x}, d_i, f_i, \mathbf{u}) \cdot \hat{I}_{t}^{(c)}(\mathbf{x} - \mathbf{u}, d_i, f_i) \right \|_{2}^{2} \tag{4} θargmint,c,i;x∈P∑ I(c)(x,di,fi)−u∑PSFθ(c)(x,di,fi,u)⋅I^t(c)(x−u,di,fi) 22(4)
subject to PSF θ ( c ) ≥ 0 \text{subject to} \quad \text{PSF}_{\theta}^{(c)} \ge 0 subject toPSFθ(c)≥0
表达式 (4) 里外面的求和表示对所有像素的通道 c c c,所有的 sensor 像素点 x \mathbf{x} x,所有的焦距 f i f_i fi 及物距 d i d_i di,其中 $ 1 \le i \le N_{I} ,以及对所有的 s e n s o r 类型, ,以及对所有的sensor 类型, ,以及对所有的sensor类型, 1 \le t \le N_{T}$,表达式内的求和,表示一个卷积的离散求和形式,是对公式(3)的一个近似,如果 d d d 是一个固定的物距,那么所表示的模糊场是一个 5 维的模糊场 ( f , t , c , x , u ) (f, t, c, \mathbf{x}, \mathbf{u}) (f,t,c,x,u),如果 d d d 也是一个变量,那就是一个 6 维的模糊场 ( d , f , t , c , x , u ) (d, f, t, c, \mathbf{x}, \mathbf{u}) (d,f,t,c,x,u)。
文章中使用 MLP 来表示这样一个模糊场,为了训练这样一个 MLP,文章中是通过获取 RAW 图来进行训练,同时只对 RAW 图上能够测量的通道像素值进行卷积求和,也就是说 RAW 图会进行通道拆分,然后每个通道单独计算当前通道的 PSF,文章中用到的 MLP 有 7 层,最后一层用的是 sigmoid 激活函数,其它层的激活函数是 RELU。
为了提升计算效率,文章中也假设 PSF 在一个局部区域内可以认为是相对类似的,细微的变化几乎可以忽略不计,这样对 x \mathbf{x} x 采样的时候,可以不用采得很密,可以每个 patch 估计一个 PSF,文章中将每个 patch 的大小定义为 PSF size 的 1.5 倍。
Image Acquisition Procedure
接下来,文章介绍了如何获取有模糊图像以及没有模糊的图像以构成训练数据对,整个流程步骤如上图所示,通过透视投影,畸变,以及 shading 获得一张没有模糊的图像 I ^ ( c ) \hat{I}^{(c)} I^(c) ,同时通过拍摄屏幕获得一张模糊图像 I ( c ) {I}^{(c)} I(c),模糊图像类似通过了镜头的光学像差的退化,没有模糊的图像类似通过镜头前的真实场景,因为从真实场景到镜头成像之间,还有坐标的变换,畸变以及 shading 的影响,所以为了让这两张图像对齐,需要做预处理。
- Homography Estimation,首先是投影矩阵 H H H 的估计,也就是单应性矩阵的估计,这一步是让没有模糊的图像与实际拍摄的图像进行坐标对齐,为了估计这样一个投影矩阵,需要进行标定,文章中使用了一组特定的 pattern,也就是两张图,一张是黑底上面有很多白色的圆点,另外一张是白底上面有很多黑色的圆点,如下图所示:

通过将 albedo dotgrid images 与拍摄的 dotgrid images 的圆点检测出来,然后计算这些圆点的圆心,圆心坐标在两张图像之间是不一样的,通过 RANSAC 算法计算这些匹配圆心之间的坐标转换关系,进而得到这个投影矩阵。
-
Lens Distortion Estimation,第二个需要考虑的是镜头的放大率以及镜头的畸变,为了解决镜头的放大率的影响,文章中先拍摄一组 focal stack 的图像,然后合成一张全对焦的图像,然后估计每个 out-of-focus 图像中圆点圆心与全对焦图像圆点圆心的映射关系,这个映射关系是一个尺度关系,
S ( x ~ , d i , f i , c ) S(\tilde{\mathbf{x}}, d_i, f_i, c) S(x~,di,fi,c)。至于镜头的畸变,文章中是用一个六阶的 Brown-Conrady 模型去模拟这个径向畸变 D ( x ~ , c ) D(\tilde{\mathbf{x}}, c) D(x~,c),这个畸变模型对所有的 f i , d i f_i, d_i fi,di 都一样。 -
Radiometric Compensation,第三个要考虑的是 shading correction,文章中叫照度补偿,因为真实镜头的光照能量会呈现中间强,四周弱的分布,文章中用一张全黑图以及一张全白图来表示环境的最弱光照以及最强光照,拍摄这两张图之后,作为 I m i n , I m a x I_{min}, I_{max} Imin,Imax,然后所有图像可以认为是这两张图像的一个线性组合:

I ^ ( x ) = [ 1 − A ( invproj ( x , d i , f i ) ) ] I m i n ( x ) + A ( invproj ( x , d i , f i ) ) I m a x ( x ) \hat{I}(\mathbf{x}) = [1 - A(\text{invproj}(\mathbf{x}, d_i, f_i))] I_{min}(\mathbf{x}) + A(\text{invproj}(\mathbf{x}, d_i, f_i)) I_{max}(\mathbf{x}) I^(x)=[1−A(invproj(x,di,fi))]Imin(x)+A(invproj(x,di,fi))Imax(x)
- Image caputure, 前面介绍的是对 albedo 图像的预处理,albedo 图像类似理想图像,表示真实环境的光照分布,接下来是考虑实际成像,也就是实拍的图像,文章中是通过拍摄屏幕的方式来获取实际退化的图像,文章中用的是一个 32 英寸的 4K 显示屏,将镜头平行放置在屏幕前面某个距离下,然后进行拍摄,不同的距离,屏幕在镜头中的成像大小不同,近距离情况下,屏幕可以占满整个成像面,远距离情况下,屏幕只能占据像面的一部分,所以远距离情况下,需要移动镜头或者移动屏幕,以保证最终的屏幕能在整个成像面都有成像。
Results
最后是实验部分,文章对比了不同的方法,也对不同的镜头模糊场做了测试,包括仿真的 PSF,实际手机的镜头模糊场,以及实际单反的镜头模糊场。
相关文章:
论文阅读:Learning Lens Blur Fields
这篇文章是对镜头模糊场进行表征学习的研究,镜头的模糊场也就是镜头的 PSF 分布,镜头的 PSF 与物距,焦距,光学系统本身的像差都有关系,实际的 PSF 分布是非常复杂而且数量也很多,这篇文章提出用一个神经网络…...
SpringBoot整合Knife4j接口文档生成工具
一个好的项目,接口文档是非常重要的,除了能帮助前端和后端开发人员更快地协作完成开发任务,接口文档还能用来生成资源权限,对权限访问控制的实现有很大的帮助。 这篇文章介绍一下企业中常用的接口文档工具Knife4j(基于…...
爬虫(三)
1.JS逆向实战破解X-Bogus值 X-Bogus:以DFS开头,总长28位 答案是X-Bogus,因为会把负载里面所有的值打包生成X-Boogus 1.1 找X-Bogus加密位置(请求堆栈) 1.1.1 绝招加高级断点(日志断点) 日志断点看有没有X-B值 日志…...
03 动力云客项目之登录功能后端实现
1 准备工作 1.1 创建项目 使用Spring initializr初始化项目 老师讲的是3.2.0, 但小版本之间问题应该不大. 1.2 项目结构 根据阿里巴巴Java开发手册确定项目结构 1.3 分层领域模型 【参考】分层领域模型规约: • DO(Data Object)&am…...

时光峰峦文物璀璨,预防性保护筑安全
在璀璨的历史长河中,珍贵文物如同时间的印记,承载着过往的辉煌。《人文山水时光峰峦——多彩贵州历史文化展》便是这样一场文化的盛宴,汇聚了众多首次露面的宝藏。然而,文物的保存对环境要求极为苛刻,温湿度波动都可能…...

Redis面试题43
人工智能在未来会有哪些可能的发展趋势? 答:人工智能在未来将继续迎来许多可能的发展趋势,以下是一些可能的方向: 更强大的算法和模型:人工智能算法和模型将不断改进和优化,为更复杂的数据和问题提供更强大…...

Redis -- list列表
只有克服了情感的波动,才能专心致志地追求事业的成功 目录 列表 list命令 lpush lpushx rpush rpushx lrange lpop rpop lindex linsert llen lrem ltrim 阻塞命令 小结 列表 列表相当于 数组或者顺序表。 列表类型是用来存储多个有序的字符串&…...
【MATLAB】使用梯度提升树在回归预测任务中进行特征选择(深度学习的数据集处理)
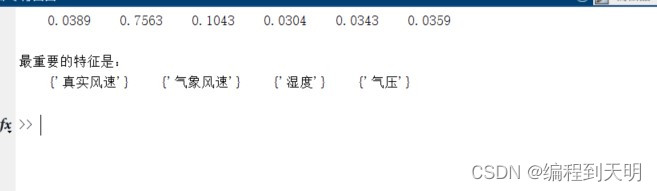
1.梯度提升树在神经网络的应用 使用梯度提升树进行特征选择的好处在于可以得到特征的重要性分数,从而识别出对目标变量预测最具影响力的特征。这有助于简化模型并提高其泛化能力,减少过拟合的风险,并且可以加快模型训练和推理速度。此外&…...
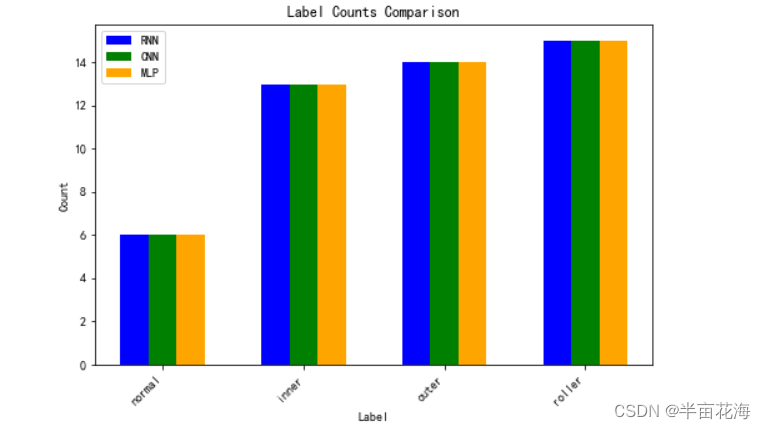
神经网络 | 基于多种神经网络模型的轴承故障检测
Hi,大家好,我是半亩花海。本文主要源自《第二届全国技能大赛智能制造工程技术项目比赛试题(样题) 模块 E 工业大数据与人工智能应用》,基于给出的已知轴承状态的振动信号样本,对数据进行分析,建…...
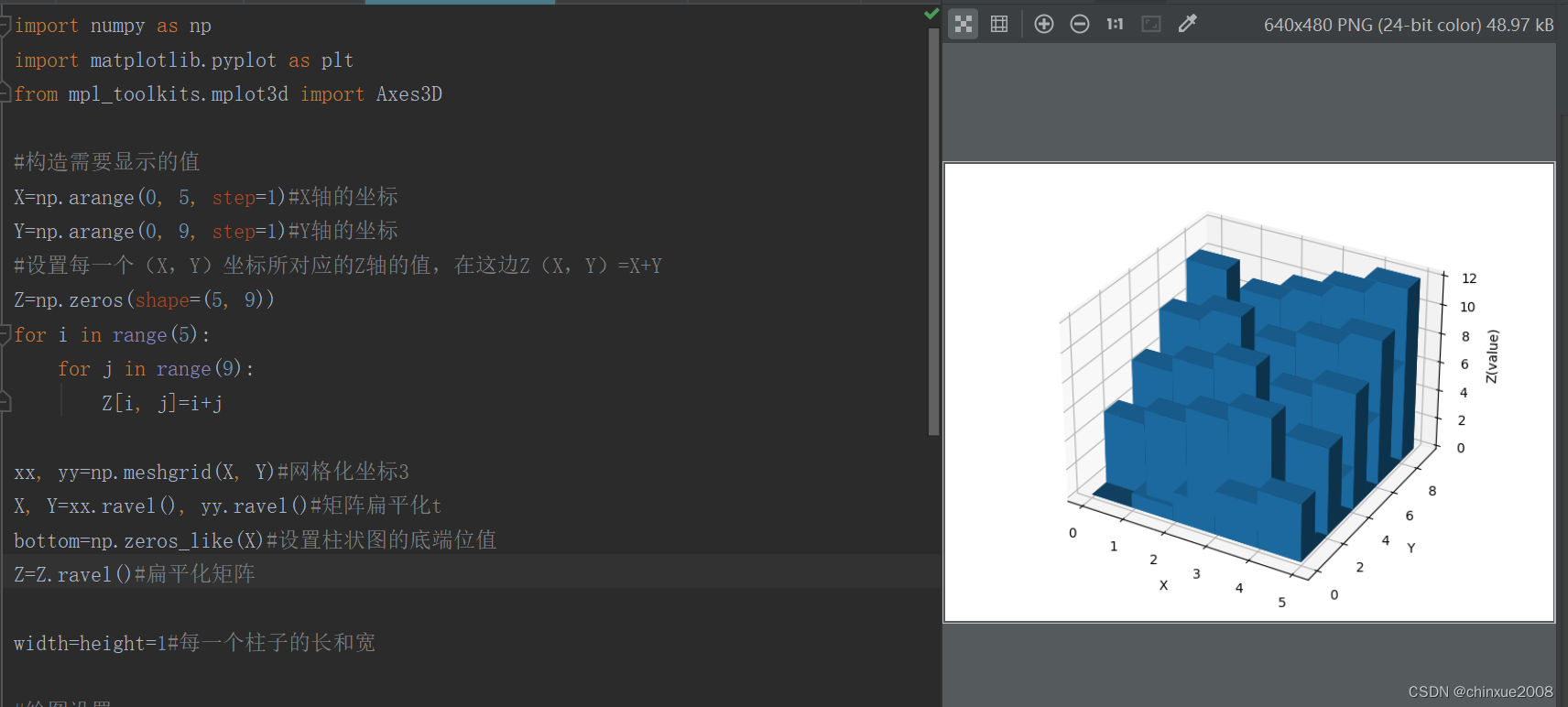
matplot画3D图的时候报错
使用matplot画3D图的时候,报这个错。 ERROR: Could not find a version that satisfies the requirement mpl_toolkits (from versions: none) ERROR: No matching distribution found for mpl_toolkits 要使用升级命令升级matplot而不是安装 pip install --upgr…...

如何使用LNMP让网站顺利工作?
如何使用LNMP让网站顺利工作? 1. Nginx的安装和部署 2. nginxphpmysql 3. nginx php-fpm安装配置 4. Nginx配置性能优化的方法 5. 如何使用Nginx实现限制各种恶意访问...
最新AI系统ChatGPT网站H5系统源码,支持Midjourney绘画局部编辑重绘,GPT语音对话+ChatFile文档对话总结+DALL-E3文生图
一、前言 SparkAi创作系统是基于ChatGPT进行开发的Ai智能问答系统和Midjourney绘画系统,支持OpenAI-GPT全模型国内AI全模型。本期针对源码系统整体测试下来非常完美,那么如何搭建部署AI创作ChatGPT?小编这里写一个详细图文教程吧。已支持GPT…...
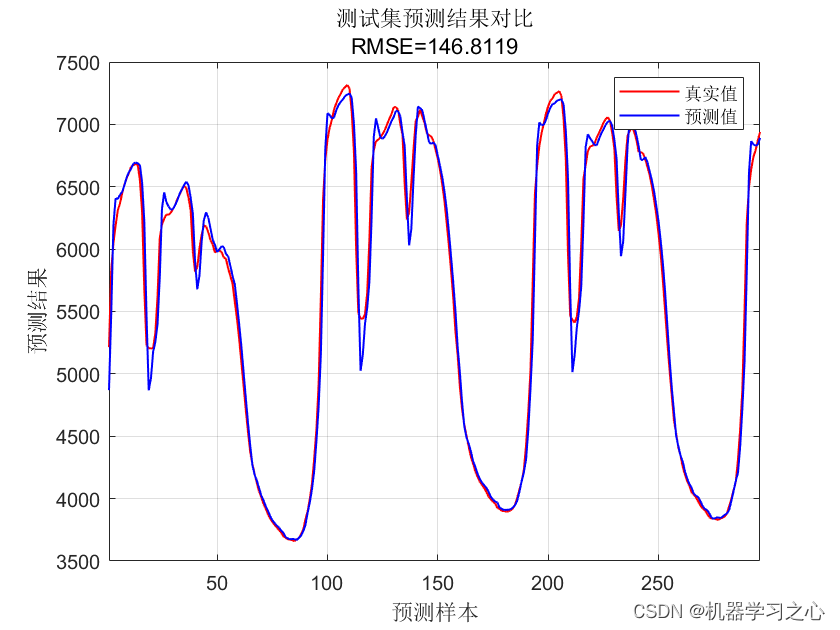
多维时序 | MATLAB实现基于CNN-LSSVM卷积神经网络-最小二乘支持向量机多变量时间序列预测
多维时序 | MATLAB实现基于CNN-LSSVM卷积神经网络-最小二乘支持向量机多变量时间序列预测 目录 多维时序 | MATLAB实现基于CNN-LSSVM卷积神经网络-最小二乘支持向量机多变量时间序列预测预测效果基本介绍程序设计参考资料 预测效果 基本介绍 1.MATLAB实现基于CNN-LSSVM卷积神经…...

使用NLTK进行自然语言处理:英文和中文示例
Natural Language Toolkit(NLTK)是一个强大的自然语言处理工具包,提供了许多有用的功能,可用于处理英文和中文文本数据。本文将介绍一些基本的NLTK用法,并提供代码示例,展示如何在英文和中文文本中应用这些…...

学习Spring的第十六天
AOP底层两种生成Proxy的方式 我来解释这两种方式 1 目标类有接口 , 调用JDK的动态代理实现 2 目标类没有接口 , 用Cglib实现 , 即生成目标类的子类 , 来实现动态代理 , 所以要求目标类不能时final修饰的 . (若有接口 , 也可用Cglib方式实现 , 需要手动配置<aop: config pr…...

学习笔记-01
学习笔记记录了我在学习官方文档过程中记的要点,可以参考学习。 go build *.go 文件 编译 go run *.go 执行 go mod init 生成依赖管理文件 gofmt -w *.go 格式换名称的大小写用来控制方法的可见域主方法及包命名规范 package main //注意package的命名࿰…...
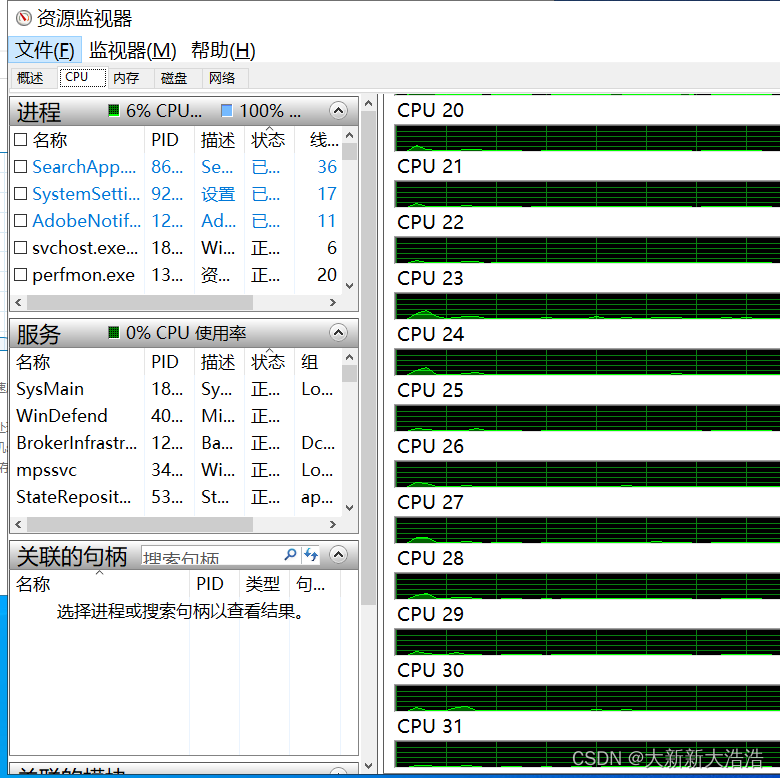
opensatck中windows虚拟机CPU核数显示异常问题处理
文章目录 一、问题描述二、元数据信息三、以32核的实例模版为例3.1 单槽位32核3.2 双槽位32核 总结 一、问题描述 openstack创建windows虚拟机的时候,使用普通的实例模版会出现CPU数量和实例模版不一致的问题。需要定制元数据才可以正常显示。 帖子:htt…...
Camunda流程引擎数据库架构
💖专栏简介 ✔️本专栏将从Camunda(卡蒙达) 7中的关键概念到实现中国式工作流相关功能。 ✔️文章中只包含演示核心代码及测试数据,完整代码可查看作者的开源项目snail-camunda ✔️请给snail-camunda 点颗星吧😘 💖数据库架构…...
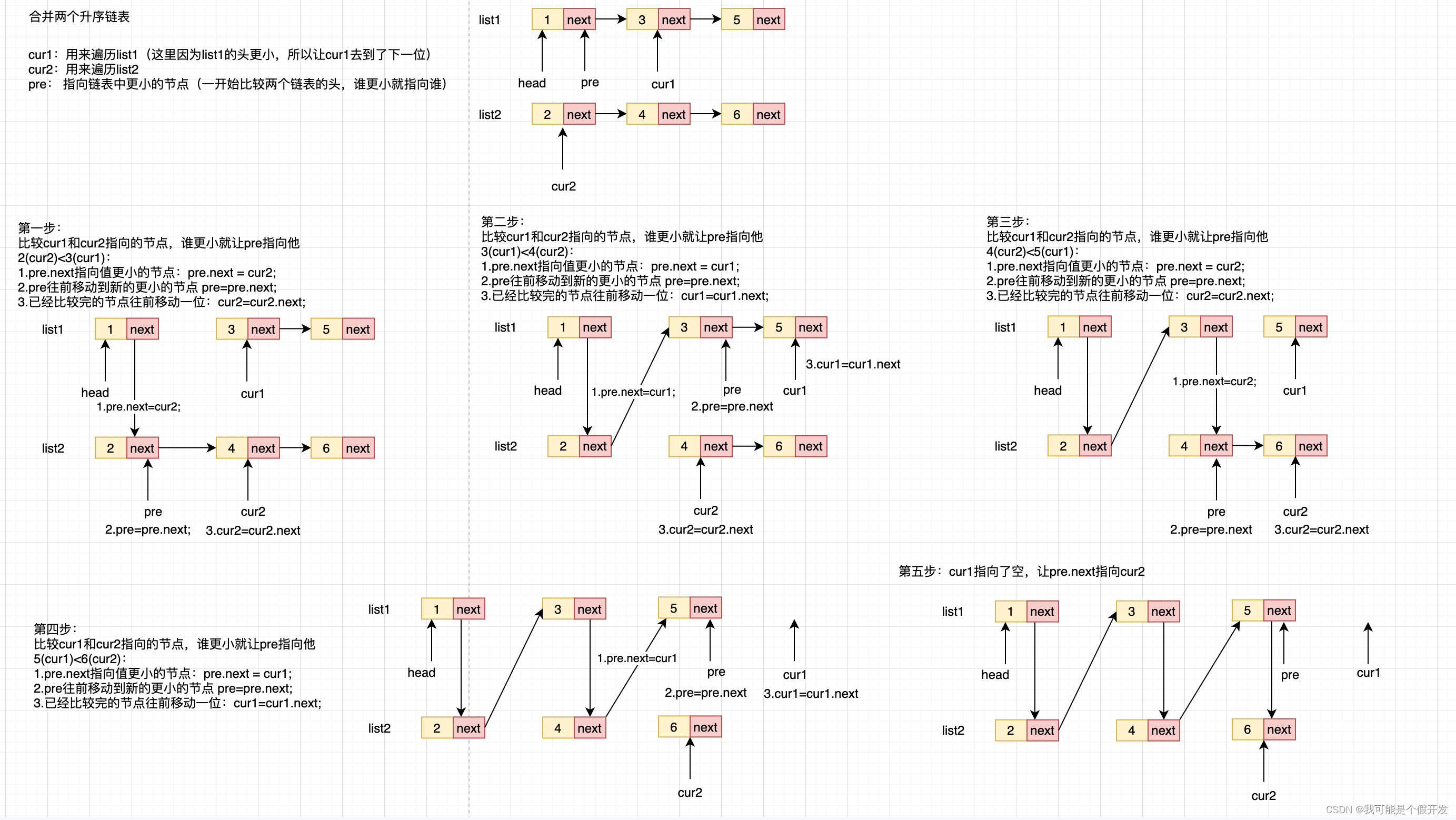
Leetcode21:合并两个有序链表
一、题目描述 将两个升序链表合并为一个新的 升序 链表并返回。新链表是通过拼接给定的两个链表的所有节点组成的。 示例: 输入:l1 [1,2,4], l2 [1,3,4] 输出:[1,1,2,3,4,4]输入:l1 [], l2 [] 输出:[]输入&#…...

深度学习驱动下的自然语言处理进展及其应用前景
文章目录 每日一句正能量前言技术进步应用场景挑战与前景自然语言处理技术当前面临的挑战未来的发展趋势和前景 伦理和社会影响实践经验后记 每日一句正能量 一个人若想拥有聪明才智,便需要不断地学习积累。 前言 自然语言处理(NLP)是一项正…...

BLE心率监测服务开发:从GATT协议到CCCD通知机制的完整实现
1. 项目概述如果你正在开发一款智能手环、心率带或者任何需要实时上报生理数据的可穿戴设备,那么蓝牙低功耗(BLE)的心率监测服务(Heart Rate Service, HRS)几乎是你绕不开的核心功能。这个看似标准的服务,其…...

【CentOS 7.6】打造现代化C/C++开发环境:Neovim配置、插件生态与智能补全实战
1. 环境准备与工具链搭建 在CentOS 7.6上构建现代化C/C开发环境,首先需要确保基础工具链的完整性。不同于桌面环境,服务器环境往往需要从源码编译安装最新版本的开发工具,这对系统兼容性和依赖管理提出了更高要求。 1.1 GCC编译器升级实战 Ce…...
)
避坑!Altium Designer 21.6 这几个Preference设置千万别乱动(附最佳实践)
Altium Designer 21.6 关键Preference设置避坑指南与高效配置策略 在电子设计自动化(EDA)领域,Altium Designer作为行业标杆工具,其强大的功能背后隐藏着诸多可能影响工作效率的"设置陷阱"。本文将从实际工程经验出发&…...

图灵奖得主断言“AI Agent最后全是数据库问题”,YashanDB如何破解 AI落地困
近日,图灵奖得主、数据库领域的泰斗级人物Mike Stonebraker的一番言论在科技圈引发轩然大波。他一针见血地指出:“AI Agent的发展,最后全都是数据库问题。”这句话扯下了当前 AI Agent 狂飙突进背后的“遮羞布”。当我们惊叹于多智能体&#…...

Arm物联网战略转型:从IP授权到端到端生态构建的机遇与挑战
1. 从IP供应商到生态构建者:Arm的物联网战略转型解析最近在梳理半导体行业动态时,Arm的一则旧闻让我思考了很久。2018年,这家以处理器IP授权闻名的公司,被曝出计划以6亿美元收购数据分析公司Treasure Data。这并非孤例,…...

终极指南:如何在Windows电脑上直接安装Android应用?
终极指南:如何在Windows电脑上直接安装Android应用? 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 嘿,朋友!你有没有过…...

基于MCP协议快速构建AI助手自定义工具:从入门到生产实践
1. 项目概述:一个为AI助手打造自定义工具的快速启动器如果你正在使用Claude Desktop或者Cursor这类AI编程助手,并且觉得它们内置的功能还不够用,比如你想让它直接查询你项目的数据库、调用某个内部API,或者执行一些特定的文件操作…...

工资到账前,先把个税摸个底
工资到账前,先把个税摸个底 什么是个税 「个税」通常指个人所得税。对大多数上班族来说,最常见的是工资薪金所得:公司发你税前工资,按规定预扣预缴一部分税款交给税务;你到手的「实发」已经扣过税了。除此之外&#…...

2026届学术党必备的六大AI论文工具推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 撰写AI毕业论文之时,需一直坚守学术伦理底线,严格禁止直接靠着生成式…...

ARM缓存控制器架构与事件监控系统解析
1. ARM缓存控制器架构概述在嵌入式处理器设计中,缓存控制器作为连接CPU核心与主存的关键中间层,其性能直接影响系统整体效率。ARM架构下的L2缓存控制器采用多级流水线设计,通过事件监控机制和精确的时序参数控制,实现了对内存访问…...