OpenHarmony轻量级内核-LiteOS-M
OpenHarmony轻量级内核
思维导图 https://download.csdn.net/download/lanlingxueyu/88816723
概述
内核是一人操作系统的运算核心,决定着系统的性能和稳定性。它是基于硬件的第一层软件扩充,提供操作系统的基本功能,是操作系统工作的基础。它负责管理系统的进程、内存、外设驱动程序、支件和网络系统
LiteOS-M
概述
百K级内存设备
支持内存保护单元
适用于轻量系统
应用于轻量系统,面向的MCU一般股是百K级内存,可支持MPU隔离,业界类似以的内核有FreeRToS或Threadx等
内核概述
LiteOS-M内核架构包含硬件相关层以及硬件无关层,
其中硬件相关层按不同编译工具链、芯片架构分类,
提供统一的HAL(Hardware Abstraction Layer)
接口其他模块属于硬件无关层,
其中基础内核模块提供基础能力,
扩展模块提供网络、文件系统等组件能力
KAL(Kernel Abstraction Layer)模块提供统一的标准接口
HAL(HardwareAbstractionLayer)接口,提升了硬件易适配性,满足AloT类型丰富的硬件和编译工具链的拓展
内存管理
静态内存
动态内存
通信机制
事件
互锁
消息队列
信号量
CMSIS(Cortex Microcontroller Software InterfaceStandard,微控制器软件接标准)
和
POSIX(Portable Operating System Interface,可移植操作系统接口)
都是可移植操作接口的标准,属于应用接口层,可增强应用软件的可移植性,降低开发难度。
CMSIS(Cortex Microcontroller Software InterfaceStandard,微控制器软件接标准)
#######
####### CMSIS是对于那些基于ARM Cortex处理器的微控制器独立于供应商的硬件抽象层。它包含多个组件层,其中之一是RTOS层,该层定义了一套通用及标准化的RTOSAPI接口,减少了应用开发者对特定RTOS的依赖,方便用户软件的移植重用。该套API有2个版本,分别为版本1(CMSIS-RTOSv1)和版本2(CMSIS-RTOSv2),OpenHarmonyLiteos-M仅提供其版本2的实现。
POSIX(Portable Operating System Interface,可移植操作系统接口)
#######
####### OpenHarmony内核使用musl libc库以及自研接口,支持部分标准POsIX接口,开发者可基于POSIX标准接口开发内核之上的组件及应用。
LiteOS-M内核启动流程
1.在开发板配置文件targetconfig.h配置系统时钟、每秒Tick数,可以对任务、内存、IPC、异常处理模块进行裁剪配置
2.系统后动时,根居配置进行指定模块的初始化
3.内核启动流程包含外设初始化、系统时钟配置、内核初始化、操作系统启动等,详见内核启动流程
LiteOS-M已经支持ARMCortex-M3、ARMCortex-M4、ARMCortex-M7、ARM Cortex-M33、RISc-V等主流架构
内核基础
任务管理
描述
从系统角度看,任务是竞争系统资源的最小运行单元。任务可以使用等待CPU、使用内存空间等系统资源,并独立于其它任务运行
Liteos-M的任务模块可以给用户提供多个任务,实现任务间的切换,帮助用户管理业务程序流程
任务模块具有如下特性
支持多任务
一个任务表示一个线程
抢占式调度机制
####### 高优先级的任务可打断低优先级任务,低优先级任务必须在高优先级任务阻塞或结束后才能得到调度
相同优先级任务支持时间片轮转调度方式
共有32个优先级[0-31],最高优先级为0,最低优先级为31
任务状态
####### 阻塞态(Blocked)包含任务被挂起(suspend状态)、任务被延时(delay状态)、任务正在等待信号量、读写队列或者等待事件等
####### 就绪态->运行态:任务创建后进入就绪态,发生任务切换时,就绪队列中最高优先级的任务被执行,从而进入运行态,同时该任务从就绪队列中移出
####### 运行态->就绪态:有更高优先级任务创建或者恢复后,会发生任务调度,此刻就绪队列中最高优先级任务变为运行态,那么原先运行的任务由运行态变为就绪态,依然在就绪队列中
####### 就绪态->阻塞态:任务也有可能在就绪态时被阻塞(挂起),此时任务状态由就绪态变为阻塞态,该任务从就绪队列中删除,不会参与任务调度,直到该任务被恢复
####### 阻塞态->就绪态:阻塞的任务被恢复后(任务恢复、延时时间超时、读信号量超时或读到信号量等),此时被恢复的任务会被加入就绪队列,从而由阻塞态变成就绪态:此时如果被恢复任务的优先级高于正在运行任务的优先级,则会发生任务切换,该任务由就绪态变成运行态
####### 运行态->阻塞态:正在运行的任务发生阻塞(挂起、延时、读信号量等)时,将该任务插入到对应的阻塞队列中,任务状态由运行态变成阻塞态,然后发生任务切换运行就绪队列中最高优先级任务
####### 运行态->退出态:运行中的任务运行结束,任务状态由运行态变为退出态。退出态包含任务运行结束的正常退出状态以及nvalid状态。例如,任务运行结束但是没有自删除,对外呈现的就是lnyalid状态,即退出态
####### 阻塞态->退出态:阻塞的任务调用删除接口,任务状态由阻塞态变为退出态
任务管理相关概念
####### 任务ID
######## 在任务创建时通过参数返回给用户,是任务的重要标识
####### 任务优先级
######## 表示任务执行的优先顺序
####### 任务入口函数
######## 新任务得到调度后将执行的函数。该函数由用户实现,在任务创建时,通过任务创建结构体设置
####### 任务栈
######## 每人任务都拥有一人独立的栈空间,我们称为任务栈。栈空间里保存的信息包含局部变量、寄存器、函数参数、函数返回地址等
####### 任务上下文
######## 任务在运行过程中使用的一些资源,如寄存器等,称为任务上下文
####### 任务控制块TCB
######## 每个任务都含有一个任务控制块(TCB)
####### 任务切换
######## 包含获取就绪队列中最高优先级任务、切出任务上下文保存、切入任务上下文恢复等动作
任务开发流程
####### 1.锁任务调度LOs_TaskLock,防止高优先级任务调度。
2.创建任务Los_TaskCreate。
3.解锁任务LOs_TaskUnlock,让任务按照优先级进行调度。
相关文章:

OpenHarmony轻量级内核-LiteOS-M
OpenHarmony轻量级内核 思维导图 https://download.csdn.net/download/lanlingxueyu/88816723 概述 内核是一人操作系统的运算核心,决定着系统的性能和稳定性。它是基于硬件的第一层软件扩充,提供操作系统的基本功能,是操作系统工作的基础。它负责管理系统的进程、内存、…...

TCP 传输控制协议——详细
目录 1 TCP 1.1 TCP 最主要的特点 1.2 TCP 的连接 TCP 连接,IP 地址,套接字 1.3 可靠传输的工作原理 1.3.1 停止等待协议 (1)无差错情况 (2)出现差错 (3)确认丢失和确认迟到…...
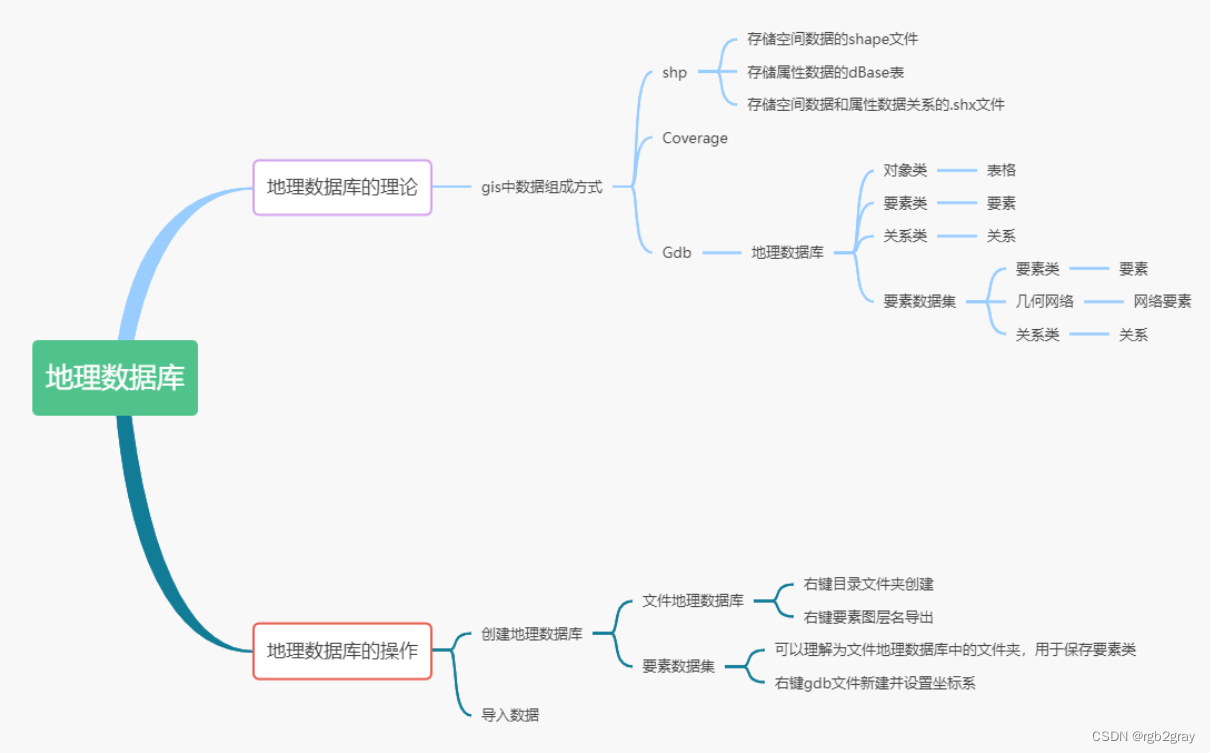
ArcGIS学习(六)地理数据库
ArcGIS学习(六)地理数据库 上个任务我们讲了一个非常重要的知识点一一坐标系。这个任务我们带来另外一个很重要的知识点一一地理数据库。 地理数据库的内容相比于坐标系简单很多! 首先,先让我们来学习下地理数据库的理论。 ArcGIS 中的地理数据库(Geodatabase)是一个用…...
——哈希算法)
保研机试算法训练个人记录笔记(四)——哈希算法
目录 两数之和 字母异位词分组 最长连续序列 力扣热题100——哈希算法 两数之和 给定一个整数数组 nums 和一个整数目标值 target,请你在该数组中找出 和为目标值 target 的那 两个 整数,并返回它们的数组下标。 你可以假设每种输入只会对应一个答…...
 打造AI编程助手 Code Copilot)
ChatGPT实战100例 - (14) 打造AI编程助手 Code Copilot
文章目录 ChatGPT实战100例 - (14) 打造AI编程助手 Code Copilot一、Code Copilot AI编程助手二、制作代码生成器2.1 定义生成器框架2.2 从现有代码提取代码模板三、进行代码优化ChatGPT实战100例 - (14) 打造AI编程助手 Code Copilot 一、Code Copilot AI编程助手 Code Copi…...

表单标记(html)
前言 发现input的type属性还是有挺多的,这里把一些常用的总结一下。 HTML 输入类型 (w3school.com.cn)https://www.w3school.com.cn/html/html_form_input_types.asp text-文本 文本输入,如果文字太长,超出的部分就不会显示。 定义供文本输入的单行…...
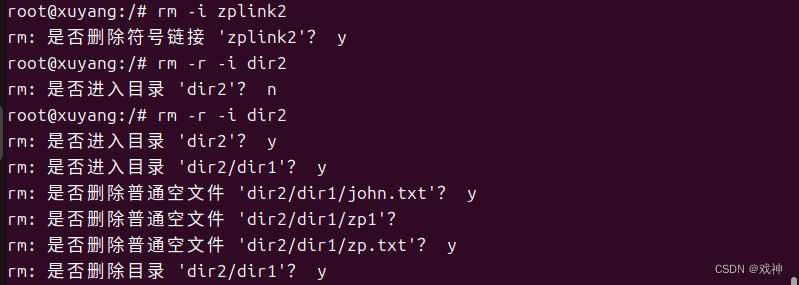
Linux文件和目录管理
目录基础 Linux操作系统以目录的方式来组织和管理系统中的所有文件。所谓的目录,就是将所有文件的说明信息采用树状结构组织起来。每个目录节点之下会有文件和子目录。 所有一切都从 ‘根’ 开始,用 ‘/’ 代表, 并且延伸到子目录。 bin:B…...

【go】gorm\xorm\ent事务处理
文章目录 1 gorm1.1 开启事务1.2 执行操作1.3 提交或回滚 2 xorm2.1 开启事务2.2 执行操作2.3 提交或回滚 3 ent3.1 开启事务3.2 执行操作3.3 提交或回滚 前言:本文介绍golang三种orm框架对数据库事务的操作 1 gorm Begin开启事务 tx *gorm.DB 1.1 开启事务 tx :…...

【数据分享】1929-2023年全球站点的逐月平均风速(Shp\Excel\免费获取)
气象数据是在各项研究中都经常使用的数据,气象指标包括气温、风速、降水、能见度等指标,说到气象数据,最详细的气象数据是具体到气象监测站点的数据! 有关气象指标的监测站点数据,之前我们分享过1929-2023年全球气象站…...

IP地址详解
IP地址是互联网协议(Internet Protocol)用于标识并定位网络中主机(如计算机、服务器、路由器等)的一串数字。它是一个32位的二进制数,通常以四个数字(每个数字范围为0-255)的形式显示࿰…...
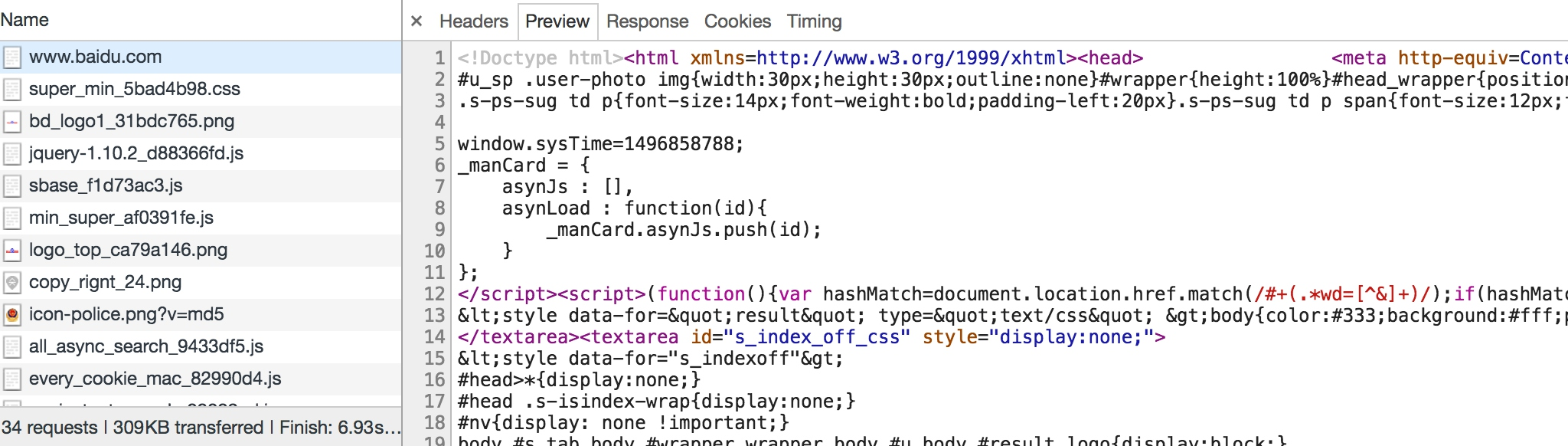
Python爬虫http基本原理#2
Python爬虫逆向系列(更新中):http://t.csdnimg.cn/5gvI3 HTTP 基本原理 在本节中,我们会详细了解 HTTP 的基本原理,了解在浏览器中敲入 URL 到获取网页内容之间发生了什么。了解了这些内容,有助于我们进一…...

Web Services 服务 是不是过时了?创建 Web Services 服务实例
Web Services 是不是过时了? 今天是兔年最后一天,先给大家拜个早年 。 昨天上午视频面试一家公司需要开发Web Services 服务,这个也没有什么,但还需要用 VB.net 开发。这个是多古老的语言了,让我想起来了 10年 前 写 …...

redis单线程还快的原因
1. 内存存储和高效数据结构: 内存存储: Redis将数据存储在内存中,因此可以实现非常高的读写速度,而无需频繁的磁盘I/O操作。 高效数据结构: Redis内置了丰富且高效的数据结构,如字符串、哈希表、列表、集合…...
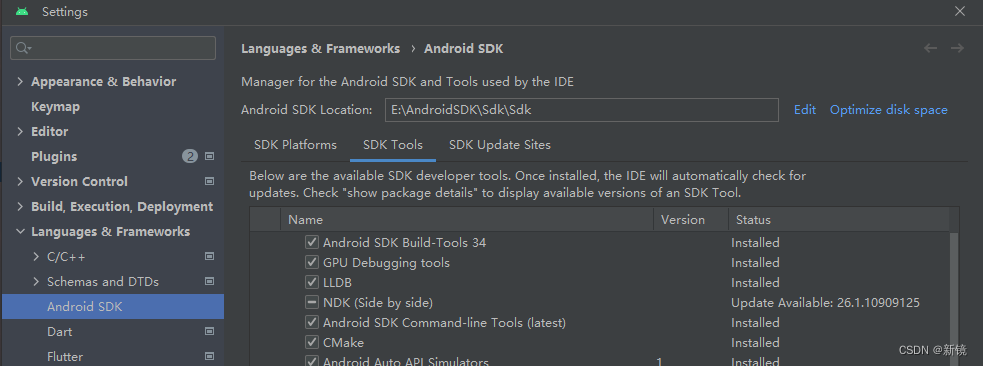
【flutter】报错 cmdline-tools component is missing
在flutterSDK目录下,双击flutter_console.bat,调出命令行。 输入flutter doctor,如果第三个诊断为[x],报cmdline-tools component is missing错(我这已经修改好了,所以是勾了),那就可…...

以用户为中心,酷开科技荣获“消费者服务之星”
在企业顺应消费升级的道路中,企业自身不仅要着力强化对于消费者服务意识的提升,并且要树立诚信自律的行业示范带头作用,助力消费环境稳中向好,不断满足人民群众对美好生活的期待。企业的发展需要消费者的认可,酷开科技…...
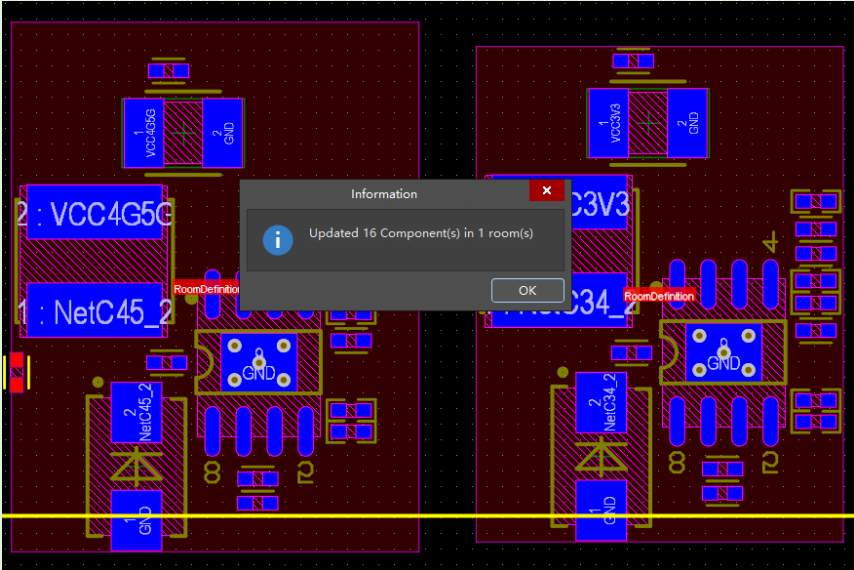
Days 27 ElfBoard 板 AltiumDesigner 相同电路快速布局布线
在进行设计开发的时候,总会遇到相同的电路,或者模块,这些电路可以使用相同的布局和走线,例如 DC-DC 电源、网口 PHY 电路部分。这类型的电路,我们可以采用AltiumDesigner 中的 Room 进行布局和布线的快速复制ÿ…...
除夕快乐(前端小烟花)
家人们,新的一年好运常在,愿大家在新的一年里得偿所愿,发财暴富,愿大家找到属于自己的那个公主,下面就给大家展示一下给公主的烟花 前端烟花 新的一年,新的挑战,愿我们不忘初心,砥砺…...

fast.ai 深度学习笔记(二)
深度学习 2:第 1 部分第 4 课 原文:medium.com/hiromi_suenaga/deep-learning-2-part-1-lesson-4-2048a26d58aa 译者:飞龙 协议:CC BY-NC-SA 4.0 来自 fast.ai 课程的个人笔记。随着我继续复习课程以“真正”理解它,这…...

风行智能电视G32Y 强制刷机升级方法,附刷机升级数据MstarUpgrade.bin
升级步骤: 1、下载刷机数据,如是压缩包,需要先解压,然后将刷机bin格式的文件重命名为MstarUpgrade.bin 2、将此文件放到U盘根目录 (U盘格式FAT32,单分区,建议4G的优盘刷机成功率高)…...

tsgctf-2021-lkgit-无锁竞争-userfaultfd
启动脚本 qemu-system-x86_64 \-kernel ./bzImage \-initrd ./rootfs.cpio \-nographic \-monitor /dev/null \-cpu kvm64,smep,smap \-append "consolettyS0 kaslr oopspanic panic1 quiet" \-no-reboot \-m 256M题目 lkgit_hash_object #define HASH_SIZE …...

Kindle Comic Converter:漫画爱好者的终极电子阅读器优化工具
Kindle Comic Converter:漫画爱好者的终极电子阅读器优化工具 【免费下载链接】kcc KCC (a.k.a. Kindle Comic Converter) is a comic and manga converter for ebook readers. 项目地址: https://gitcode.com/gh_mirrors/kc/kcc 你是否曾经尝试在Kindle或其…...

抖音批量下载工具终极指南:从零开始实现高效无水印下载
抖音批量下载工具终极指南:从零开始实现高效无水印下载 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback supp…...
)
保姆级教程:用PHPStudy+Nginx一键部署新麦同城V3开源版(附数据库配置避坑点)
零基础30分钟部署新麦同城V3:PHPStudyNginx全流程避坑指南 第一次接触本地部署开源系统时,最怕的不是代码复杂,而是明明按教程操作却卡在某个配置环节。本文将以真实踩坑记录为核心,手把手带你在Windows环境下用PHPStudy快速搭建…...

2025届毕业生推荐的六大降AI率助手实测分析
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 针对内容创作范畴而言,AI生成内容也就是AIGC的运用愈发普遍,然而所生…...
全流程实操:从ONNX转换到INT8/FP16量化加速)
YOLOv8在Jetson上导出TensorRT引擎(.engine)全流程实操:从ONNX转换到INT8/FP16量化加速
YOLOv8在Jetson平台上的TensorRT引擎部署与量化加速实战指南 当目标检测模型需要部署到边缘计算设备时,性能优化往往成为最关键的技术挑战。本文将深入探讨如何将YOLOv8模型高效转换为Jetson平台专用的TensorRT引擎,并通过INT8/FP16量化技术实现推理速度…...

避坑!用ArcGIS计算格网内耕地比例时,90%的人会忽略的数据连接问题
避坑!用ArcGIS计算格网内耕地比例时,90%的人会忽略的数据连接问题 在土地利用规划、农业资源评估等GIS应用中,计算规则格网内的耕地面积占比是一项基础但关键的操作。许多从业者能够顺利完成渔网创建、耕地提取和分区统计步骤,却在…...

别再折腾源码编译了!用Docker 5分钟搞定 mediasoup-demo v5 视频会议服务器部署
5分钟极速部署:Docker化mediasoup视频会议系统实战指南 在实时音视频通信领域,快速搭建可靠的测试环境往往是开发者面临的第一道门槛。传统源码编译方式需要处理Node.js版本兼容、依赖下载、端口配置等一系列繁琐问题,而Docker技术为这一过程…...

告别COM Server!用Python+UDP给CANoe CAPL脚本开个“外挂”
突破CAPL封闭性:Python与CANoe的轻量级UDP通信实战 在汽车电子测试领域,CANoe作为行业标准工具,其内置的CAPL脚本语言为测试工程师提供了强大的自动化能力。然而,当我们需要将外部复杂算法(如机器学习模型)…...

Windows安卓子系统终极指南:5步打造完美移动应用体验
Windows安卓子系统终极指南:5步打造完美移动应用体验 【免费下载链接】WSA Developer-related issues and feature requests for Windows Subsystem for Android 项目地址: https://gitcode.com/gh_mirrors/ws/WSA 想在Windows电脑上流畅运行手机应用吗&…...
)
从碰撞到安全路径:在MATLAB里为你的机械臂规划一条无碰撞轨迹(附完整代码)
七轴机械臂无碰撞轨迹规划实战:从MATLAB基础到高级避障策略 机械臂在复杂环境中的自主运动一直是工业自动化和服务机器人领域的核心挑战。想象一下,当一台七轴机械臂需要在布满障碍物的空间里精准抓取物品时,如何确保它不会撞上周围的工作台、…...