嵌入式培训机构四个月实训课程笔记(完整版)-Linux ARM驱动编程第二天-arm ads下的start.S分析(物联技术666)
链接:https://pan.baidu.com/s/1E4x2TX_9SYhxM9sWfnehMg?pwd=1688
提取码:1688
;=========================================
; NAME: 2440INIT.S
; DESC: C start up codes
; Configure memory, ISR ,stacks
; Initialize C-variables
; 完全注释
; HISTORY:
; 2002.02.25:kwtark: ver 0.0
; 2002.03.20:purnnamu: Add some functions for testing STOP,Sleep mode
; 2003.03.14:DonGo: Modified for 2440.
; 2009 06.24:Tinko Modified
;=========================================
;汇编不能使用include包含头文件,所有用Get
;汇编也不认识*.h 文件,所有只能用*.inc
GET option.inc ;定义芯片相关的配置
GET memcfg.inc ;定义存储器配置
GET 2440addr.inc ;定义了寄存器符号
;REFRESH寄存器[22]bit : 0- auto refresh; 1 - self refresh
BIT_SELFREFRESH EQU (1<<22) ;用于节电模式中,SDRAM自动刷新
;处理器模式常量: CPSR寄存器的后5位决定目前处理器模式 M[4:0]
USERMODE EQU 0x10
FIQMODE EQU 0x11
IRQMODE EQU 0x12
SVCMODE EQU 0x13
ABORTMODE EQU 0x17
UNDEFMODE EQU 0x1b
MODEMASK EQU 0x1f ;M[4:0]
NOINT EQU 0xc0
;定义处理器各模式下堆栈地址常量
UserStack EQU (_STACK_BASEADDRESS-0x3800) ;0x33ff4800 ~ _STACK_BASEADDRESS定义在option.inc中
SVCStack EQU (_STACK_BASEADDRESS-0x2800) ;0x33ff5800 ~
UndefStack EQU (_STACK_BASEADDRESS-0x2400) ;0x33ff5c00 ~
AbortStack EQU (_STACK_BASEADDRESS-0x2000) ;0x33ff6000 ~
IRQStack EQU (_STACK_BASEADDRESS-0x1000) ;0x33ff7000 ~
FIQStack EQU (_STACK_BASEADDRESS-0x0) ;0x33ff8000 ~
;arm处理器有两种工作状态 1.arm:32位 这种工作状态下执行字对准的arm指令 2.Thumb:16位 这种工作状
;态执行半字对准的Thumb指令
;因为处理器分为16位 32位两种工作状态 程序的编译器也是分16位和32两种编译方式 所以下面的程序用
;于根据处理器工作状态确定编译器编译方式
;code16伪指令指示汇编编译器后面的指令为16位的thumb指令
;code32伪指令指示汇编编译器后面的指令为32位的arm指令
;
;Arm上电时处于ARM状态,故无论指令为ARM集或Thumb集,都先强制成ARM集,待init.s初始化完成后
;再根据用户的编译配置转换成相应的指令模式。为此,定义变量THUMBCODE作为指示,跳转到main之前
;根据其值切换指令模式
;
;这段是为了统一目前的处理器工作状态和软件编译方式(16位编译环境使用tasm.exe编译
;Check if tasm.exe(armasm -16 ...@ADS 1.0) is used.
GBLL THUMBCODE ;定义THUMBCODE全局变量注意EQU所定义的宏与变量的区别
[ {CONFIG} = 16 ;如果发现是在用16位代码的话(编译选项中指定使用thumb指令)
THUMBCODE SETL {TRUE} ;一方面把THUMBCODE设置为TURE
CODE32 ;另一方面暂且把处理器设置成为ARM模式,以方便初始化
| ;(|表示else)如果编译选项本来就指定为ARM模式
THUMBCODE SETL {FALSE} ;把THUMBCODE设置为FALSE就行了
] ;结束
MACRO ;一个根据THUMBCODE把PC寄存的值保存到LR的宏
MOV_PC_LR ;宏名称
[ THUMBCODE ;如果定义了THUMBCODE,则
bx lr ;在ARM模式中要使用BX指令转跳到THUMB指令,并转换模式. bx指令会根据PC最后1位来确定是否进入thumb状态
| ;否则,
mov pc,lr ;如果目标地址也是ARM指令的话就采用这种方式
]
MEND ;宏定义结束标志
MACRO ;和上面的宏一样,只是多了一个相等的条件
MOVEQ_PC_LR
[ THUMBCODE
bxeq lr
|
moveq pc,lr
]
MEND
;=======================================================================================
;下面这个宏是用于第一次查表过程的实现中断向量的重定向,如果你比较细心的话就是发现
;在_ISR_STARTADDRESS=0x33FF_FF00里定义的第一级中断向量表是采用型如Handle***的方式的.
;而在程序的ENTRY处(程序开始处)采用的是b Handler***的方式.
;在这里Handler***就是通过HANDLER这个宏和Handle***建立联系的.
;这种方式的优点就是正真定义的向量数据在内存空间里,而不是在ENTRY处的ROM(FLASH)空间里,
;这样,我们就可以在程序里灵活的改动向量的数据了.
;========================================================================================
;;这段程序用于把中断服务程序的首地址装载到pc中,有人称之为“加载程序”。
;本初始化程序定义了一个数据区(在文件最后),34个字空间,存放相应中断服务程序的首地址。每个字
;空间都有一个标号,以Handle***命名。
;在向量中断模式下使用“加载程序”来执行中断服务程序。
;这里就必须讲一下向量中断模式和非向量中断模式的概念
;向量中断模式是当cpu读取位于0x18处的IRQ中断指令的时候,系统自动读取对应于该中断源确定地址上的;
;指令取代0x18处的指令,通过跳转指令系统就直接跳转到对应地址
;函数中 节省了中断处理时间提高了中断处理速度标 例如 ADC中断的向量地址为0xC0,则在0xC0处放如下
;代码:ldr PC,=HandlerADC 当ADC中断产生的时候系统会
;自动跳转到HandlerADC函数中
;非向量中断模式处理方式是一种传统的中断处理方法,当系统产生中断的时候,系统将interrupt
;pending寄存器中对应标志位置位 然后跳转到位于0x18处的统一中断
;函数中 该函数通过读取interrupt pending寄存器中对应标志位 来判断中断源 并根据优先级关系再跳到
;对应中断源的处理代码中
;
;H|------| H|------| H|------| H|------| H|------|
; |/ / / | |/ / / | |/ / / | |/ / / | |/ / / |
; |------|<----sp |------| |------| |------| |------|<------sp
;L| | |------|<----sp L|------| |-isr--| |------| isr==>pc
; | | | | |--r0--|<----sp |---r0-|<----sp L|------| r0==>r0
; (0) (1) (2) (3) (4)
MACRO
$HandlerLabel HANDLER $HandleLabel
$HandlerLabel ;标号
sub sp,sp,#4 ;(1)减少sp(用于存放转跳地址)
stmfd sp!,{r0} ;(2)把工作寄存器压入栈(lr does not push because it return to original address)
ldr r0,=$HandleLabel;将HandleXXX的址址放入r0
ldr r0,[r0] ;把HandleXXX所指向的内容(也就是中断程序的入口)放入r0
str r0,[sp,#4] ;(3)把中断服务程序(ISR)压入栈
ldmfd sp!,{r0,pc} ;(4)用出栈的方式恢复r0的原值和为pc设定新值(也就完成了到ISR的转跳)
MEND
;=========================================================================================
;在这里用IMPORT伪指令(和c语言的extren一样)引入|Image$RO$Base|,|Image$RO$Limit|...
;这些变量是通过ADS的工程设置里面设定的RO Base和RW Base设定的,
;最终由编译脚本和连接程序导入程序.
;那为什么要引入这玩意呢,最简单的用处是可以根据它们拷贝自已
;==========================================================================================
;Image$RO$Base等比较古怪的变量是编译器生成的。RO, RW, ZI这三个段都保存在Flash中,但RW,ZI在Flash中
;的地址肯定不是程序运行时变量所存储的位置,因此我们的程序在初始化时应该把Flash中的RW,ZI拷贝到RAM的对应位置。
;一般情况下,我们可以利用编译器替我们实现这个操作。比如我们跳转到main()时,使用 b __Main,编译器就会在__Main
;和Main之间插入一段汇编代码,来替我们完成RW,ZI段的初始化。 如果我们使用 b Main, 那么初始化工作要我们自己做。
;编译器会生成如下变量告诉我们RO,RW,ZI三个段应该位于什么位置,但是它并没有告诉我们RW,ZI在Flash中存储在什么位置,
;实际上RW,ZI在Flash中的位置就紧接着RO存储。我们知道了Image$RO$Base,Image$RO$Limit,那么Image$RO$Limit就
;是RW(ROM data)的开始。
IMPORT |Image$RO$Base| ; Base of ROM code
IMPORT |Image$RO$Limit| ; End of ROM code (=start of ROM data)
IMPORT |Image$RW$Base| ; Base of RAM to initialise
IMPORT |Image$ZI$Base| ; Base and limit of area
IMPORT |Image$ZI$Limit| ; to zero initialise
;这里引入一些在其它文件中实现在函数,包括为我们所熟知的main函数
;IMPORT MMU_SetAsyncBusMode
;IMPORT MMU_SetFastBusMode ;hzh
IMPORT Main
;从这里开始就是正真的代码入口了!
AREA Init,CODE,READONLY ;这表明下面的是一个名为Init的代码段
ENTRY ;定义程序的入口(调试用)
EXPORT __ENTRY ;导出符号_ENTRY,但在那用到就还没查明
__ENTRY
ResetEntry
;1)The code, which converts to Big-endian, should be in little endian code.
;2)The following little endian code will be compiled in Big-Endian mode.
; The code byte order should be changed as the memory bus width.
;3)The pseudo instruction,DCD can not be used here because the linker generates error.
;条件编译,在编译成机器码前就设定好
ASSERT :DEF:ENDIAN_CHANGE ;判断ENDIAN_CHANGE是否已定义
[ ENDIAN_CHANGE ;如果已经定义了ENDIAN_CHANGE,则(在Option.inc里已经设为FALSE )
ASSERT :DEF:ENTRY_BUS_WIDTH ;判断ENTRY_BUS_WIDTH是否已定义
[ ENTRY_BUS_WIDTH=32 ;如果已经定义了ENTRY_BUS_WIDTH,则判断是不是为32
b ChangeBigEndian ;DCD 0xea000007
]
;在bigendian中,地址为A的字单元包括字节单元A,A+1,A+2,A+3,字节单元由高位到低位为A,A+1,A+2,A+3
; 地址为A的字单元包括半字单元A,A+2,半字单元由高位到低位为A,A+2
[ ENTRY_BUS_WIDTH=16
andeq r14,r7,r0,lsl #20 ;DCD 0x0007ea00 也是b ChangeBigEndian指令,只是由于总线不一样而取机器码的顺序不一样
] ;先取低位->高位 上述指令是通过机器码装换而来的
[ ENTRY_BUS_WIDTH=8
streq r0,[r0,-r10,ror #1] ;DCD 0x070000ea 也是b ChangeBigEndian指令,只是由于总线不一样而取机器码的顺序不一样
]
|
b ResetHandler ;我们的程序由于ENDIAN_CHANGE设成FALSE就到这儿了,转跳到复位程序入口
]
b HandlerUndef ;handler for Undefined mode ;0x04
b HandlerSWI ;handler for SWI interrupt ;0x08
b HandlerPabort ;handler for PAbort ;0x0c
b HandlerDabort ;handler for DAbort ;0x10
b . ;reserved 注意小圆点 ;0x14
b HandlerIRQ ;handler for IRQ interrupt ;0x18
b HandlerFIQ ;handler for FIQ interrupt ;0x1c
;@0x20
b EnterPWDN ; Must be @0x20.
;==================================================================================
;下面是改变大小端的程序,这里采用直接定义机器码的方式,至说为什么这么做就得问三星了
;反正我们程序里这段代码也不会去执行,不用去管它
;==================================================================================
;通过设置CP15的C1的位7,设置存储格式为Bigendian,三种总线方式
ChangeBigEndian ;//here ENTRY_BUS_WIDTH=16
;@0x24
[ ENTRY_BUS_WIDTH=32
DCD 0xee110f10 ;0xee110f10 => mrc p15,0,r0,c1,c0,0
DCD 0xe3800080 ;0xe3800080 => orr r0,r0,#0x80; //Big-endian
DCD 0xee010f10 ;0xee010f10 => mcr p15,0,r0,c1,c0,0
;对存储器控制寄存器操作,指定内存模式为Big-endian
;因为刚开始CPU都是按照32位总线的指令格式运行的,如果采用其他的话,CPU别不了,必须转化
;但当系统初始化好以后,则CPU能自动识别
]
[ ENTRY_BUS_WIDTH=16
DCD 0x0f10ee11
DCD 0x0080e380
DCD 0x0f10ee01
;因为采用Big-endian模式,采用16位总线时,物理地址的高位和数据的地位对应
;所以指令的机器码也相应的高低对调
]
[ ENTRY_BUS_WIDTH=8
DCD 0x100f11ee
DCD 0x800080e3
DCD 0x100f01ee
]
DCD 0xffffffff ;swinv 0xffffff is similar with NOP and run well in both endian mode.
DCD 0xffffffff
DCD 0xffffffff
DCD 0xffffffff
DCD 0xffffffff
b ResetHandler
;=========================================================================================
; Function for entering power down mode
; 1. SDRAM should be in self-refresh mode.
; 2. All interrupt should be maksked for SDRAM/DRAM self-refresh.
; 3. LCD controller should be disabled for SDRAM/DRAM self-refresh.
; 4. The I-cache may have to be turned on.
; 5. The location of the following code may have not to be changed.
;void EnterPWDN(int CLKCON);
EnterPWDN
mov r2,r0 ;r2=rCLKCON 保存原始数据 0x4c00000c 使能各模块的时钟输入
tst r0,#0x8 ;测试bit[3] SLEEP mode? 1=>sleep
bne ENTER_SLEEP ;C=0,即TST结果非0,bit[3]=1
;//进入PWDN后如果不是sleep则进入stop
;//进入Stop mode
ENTER_STOP
ldr r0,=REFRESH ;0x48000024 DRAM/SDRAM refresh config
ldr r3,[r0] ;r3=rREFRESH
mov r1, r3
orr r1, r1, #BIT_SELFREFRESH ;Enable SDRAM self-refresh
str r1, [r0] ;Enable SDRAM self-refresh
mov r1,#16 ;wait until self-refresh is issued. may not be needed.
0
subs r1,r1,#1
bne %B0
;//wait 16 fclks for self-refresh
ldr r0,=CLKCON ;enter STOP mode.
str r2,[r0]
mov r1,#32
0
subs r1,r1,#1 ;1) wait until the STOP mode is in effect.
bne %B0 ;2) Or wait here until the CPU&Peripherals will be turned-off
;Entering SLEEP mode, only the reset by wake-up is available.
ldr r0,=REFRESH ;exit from SDRAM self refresh mode.
str r3,[r0]
MOV_PC_LR ;back to main process
ENTER_SLEEP
;NOTE.
;1) rGSTATUS3 should have the return address after wake-up from SLEEP mode.
ldr r0,=REFRESH
ldr r1,[r0] ;r1=rREFRESH
orr r1, r1, #BIT_SELFREFRESH
str r1, [r0] ;Enable SDRAM self-refresh
;//Enable SDRAM self-refresh
mov r1,#16 ;Wait until self-refresh is issued,which may not be needed.
0
subs r1,r1,#1
bne %B0
;//Wait until self-refresh is issued,which may not be needed
ldr r1,=MISCCR ;IO register
ldr r0,[r1]
orr r0,r0,#(7<<17) ;Set SCLK0=1, SCLK1=1, SCKE=1.
str r0,[r1]
ldr r0,=CLKCON ; Enter sleep mode
str r2,[r0]
b . ;CPU will die here.
;//进入Sleep Mode,1)设置SDRAM为self-refresh
;// 2)设置MISCCR bit[17] 1:sclk0=sclk 0:sclk0=0
;// bit[18] 1:sclk1=sclk 0:sclk1=0
;// bit[19] 1:Self refresh retain enable
;// 0:Self refresh retain disable
;// When 1, After wake-up from sleep, The self-refresh will be retained.
WAKEUP_SLEEP
;Release SCLKn after wake-up from the SLEEP mode.
ldr r1,=MISCCR
ldr r0,[r1]
bic r0,r0,#(7<<17) ;SCLK0:0->SCLK, SCLK1:0->SCLK, SCKE:0->=SCKE.
str r0,[r1]
;//设置MISCCR
;Set memory control registers
;ldr r0,=SMRDATA
adrl r0, SMRDATA
ldr r1,=BWSCON ;BWSCON Address ;//总线宽度和等待控制寄存器
add r2, r0, #52 ;End address of SMRDATA
0
ldr r3, [r0], #4 ;数据处理后R0自加4,[R0]->R3,R0+4->R0
str r3, [r1], #4
cmp r2, r0
bne %B0
;//设置所有的memory control register,他的初始地址为BWSCON,初始化
;//数据在以SMRDATA为起始的存储区
mov r1,#256
0
subs r1,r1,#1 ;1) wait until the SelfRefresh is released.
bne %B0
;//1) wait until the SelfRefresh is released.
ldr r1,=GSTATUS3 ;GSTATUS3 has the start address just after SLEEP wake-up
ldr r0,[r1]
mov pc,r0
;//跳出Sleep Mode,进入Sleep状态前的PC
;============================================================================================
;如上所说,这里采用HANDLER宏去建立Hander***和Handle***之间的联系
LTORG ;声明文字池,因为我们用了ldr伪指令
HandlerFIQ HANDLER HandleFIQ
HandlerIRQ HANDLER HandleIRQ
HandlerUndef HANDLER HandleUndef
HandlerSWI HANDLER HandleSWI
HandlerDabort HANDLER HandleDabort
HandlerPabort HANDLER HandlePabort
;===================================================================================
;呵呵,来了来了.好戏来了,这一段程序就是用来进行第二次查表的过程了.
;如果说第一次查表是由硬件来完成的,那这一次查表就是由软件来实现的了.
;为什么要查两次表??
;没有办法,ARM把所有的中断都归纳成一个IRQ中断异常和一个FIRQ中断异常
;第一次查表主要是查出是什么异常,可我们总要知道是这个中断异常中的什么中断呀!
;没办法了,再查一次表呗!
;===================================================================================
;//外部中断号判断,通过中断服务程序入口地址存储器的地址偏移确定
;//PC=[HandleEINT0+[INTOFFSET]]
;H|------|
; |/ / / |
; |--isr-| ====>pc
;L|--r8--|
; |--r9--|<----sp
IsrIRQ
sub sp,sp,#4 ;给PC寄存器保留 reserved for PC
stmfd sp!,{r8-r9} ;把r8-r9压入栈
ldr r9,=INTOFFSET ;把INTOFFSET的地址装入r9 INTOFFSET是一个内部的寄存器,存着中断的偏移
ldr r9,[r9] ;I_ISR
ldr r8,=HandleEINT0 ;这就是我们第二个中断向量表的入口的,先装入r8
;===================================================================================
;哈哈,这查表方法够好了吧,r8(入口)+index*4(别望了一条指令是4 bytes的喔),
;这不就是我们要找的那一项了吗.找到了表项,下一步做什么?肯定先装入了!
;==================================================================================
add r8,r8,r9,lsl #2 ;地址对齐,因为每个中断向量占4个字节,即isr = IvectTable + Offeset * 4
ldr r8,[r8] ;装入中断服务程序的入口
str r8,[sp,#8] ;把入口也入栈,准备用旧招
ldmfd sp!,{r8-r9,pc} ;施招,弹出栈,哈哈,顺便把r8弹出到PC了,跳转成功!
LTORG
;==============================================================================
; ENTRY(好了,我们的CPU要在这复位了.)
;==============================================================================
ResetHandler
ldr r0,=WTCON ;1.关看门狗
ldr r1,=0x0 ;bit[5]: 0 - disable; 1 - enable (reset 默认)
str r1,[r0]
ldr r0,=INTMSK
ldr r1,=0xffffffff ;2.关中断
str r1,[r0]
ldr r0,=INTSUBMSK
ldr r1,=0x7fff ;3.关子中断
str r1,[r0]
[ {FALSE} ;4.得有些表示了,该点点LED灯了,不过被FALSE掉了.
;rGPFDAT = (rGPFDAT & ~(0xf<<4)) | ((~data & 0xf)<<4);
; Led_Display
ldr r0,=GPFCON
ldr r1,=0x5500
str r1,[r0]
ldr r0,=GPFDAT
ldr r1,=0x10
str r1,[r0]
]
;5.为了减少PLL的lock time, 调整LOCKTIME寄存器.
;To reduce PLL lock time, adjust the LOCKTIME register.
ldr r0,=LOCKTIME
ldr r1,=0xffffff ;reset的默认值
str r1,[r0]
;6.下面就来设置PLL了,你的板快不快就看这了!!
;这里介绍一下计算公式
;//Fpllo=(m*Fin)/(p*2^s)
;//m=MDIV+8,p=PDIV+2,s=SDIV
;The proper range of P and M: 1<=P<=62, 1<=M<=248
;Fpllo必须大于200Mhz小于600Mhz
;Fpllo*2^s必须小于1.2GHz
;如下面的PLLCON设定中的M_DIV P_DIV S_DIV是取自option.h中
;#elif (MCLK==40000000)
;#define PLL_M (0x48)
;#define PLL_P (0x3)
;#define PLL_S (0x2)
;所以m=MDIV+8=80,p=PDIV+2=5,s=SDIV=2
;硬件使用晶振为10Mhz,即Fin=10Mhz
;Fpllo=80*10/5*2^2=40Mhz
[ PLL_ON_START
; Added for confirm clock divide. for 2440.
; Setting value Fclk:Hclk:Pclk
ldr r0,=CLKDIVN
ldr r1,=CLKDIV_VAL ; 0=1:1:1, 1=1:1:2, 2=1:2:2, 3=1:2:4, 4=1:4:4, 5=1:4:8, 6=1:3:3, 7=1:3:6. option.inc中定义CLKDIV_VAL=7
str r1,[r0] ;//数据表示分频数
;===============================================================================
;MMU_SetAsyncBusMode 和 MMU_SetFastBusMode 都在4K代码以上,
;如果你想你编译出来的程序能在NAND上运行的话,就不要在这调用这两函数了.
;如果你不要求的话,你就用把.啥事没有.
;为什么是4K,问三星吧,就提供4K的内部SRAM,要是提供400K多好呀.
;好了,好了,4K就4K吧,不能用这两函数,自己写还不行吗,下面的代码这这么来了,
;实现和上面两函数一样的功能.
;===============================================================================
; [ CLKDIV_VAL>1 ; 意思是 Fclk:Hclk 不是 1:1.
; bl MMU_SetAsyncBusMode
; |
; bl MMU_SetFastBusMode ; default value.
; ]
; ==手册第243页==
; If HDIVN is not 0, the CPU bus mode has to be changed from the fast bus mode to the asynchronous
; bus mode using following instructions
;MMU_SetAsyncBusMode
;mrc p15,0,r0,c1,c0,0
;orr r0,r0,#R1_nF:OR:R1_iA
;mcr p15,0,r0,c1,c0,0
[ CLKDIV_VAL>1 ; 意思是 Fclk:Hclk 不是 1:1.
mrc p15,0,r0,c1,c0,0
orr r0,r0,#0xc0000000;R1_nF:OR:R1_iA
mcr p15,0,r0,c1,c0,0
|
mrc p15,0,r0,c1,c0,0
bic r0,r0,#0xc0000000;R1_iA:OR:R1_nF
mcr p15,0,r0,c1,c0,0
]
;配置 UPLL
;//Configure UPLL Fin=12.0MHz UFout=48MHz
ldr r0,=UPLLCON
ldr r1,=((U_MDIV<<12)+(U_PDIV<<4)+U_SDIV) ;//USB PLL CONFIG 56,2,2===>48MHz
str r1,[r0]
;7个nop必不可少!!
nop ;// Caution: After UPLL setting, at least 7-clocks delay must be inserted for setting hardware be completed.
nop
nop
nop
nop
nop
nop
;配置 MPLL
;//Configure MPLL Fin=12.0MHz MFout=304.8MHz
ldr r0,=MPLLCON
ldr r1,=((M_MDIV<<12)+(M_PDIV<<4)+M_SDIV) ;68,1,1 ==>304MHz
str r1,[r0]
]
;检查是否从SLEEP模式中恢复
;//Check if the boot is caused by the wake-up from SLEEP mode.
ldr r1,=GSTATUS2
ldr r0,[r1]
tst r0,#0x2 ;test if bit[1] is 1 or 0 0->C=1
; 1->C=0
;In case of the wake-up from SLEEP mode, go to SLEEP_WAKEUP handler.
bne WAKEUP_SLEEP ;C=0,jump
EXPORT StartPointAfterSleepWakeUp
StartPointAfterSleepWakeUp
;===============================================================================
;设置内存控制器等寄存器的值,因为这些寄存器是连续排列的,所以采用如下办法对这些
;寄存器进行连续设置.其中用到了SMRDATA的数据,这在代码后面有定义
;===============================================================================
;这是设置SDRAM,flash ROM 存储器连接和工作时序的程序,片选定义的程序
;SMRDATA map在下面的程序中定义
;SMRDATA中涉及的值请参考memcfg.inc程序
;Set memory control registers
;ldr r0,=SMRDATA ;dangerous!!!
adrl r0, SMRDATA ;be careful!, tinko
ldr r1,=BWSCON ;BWSCON Address
add r2, r0, #52 ;End address of SMRDATA ;SMRDATA数据的结束地址,共有52字节的数据
0
ldr r3, [r0], #4
str r3, [r1], #4
cmp r2, r0
bne %B0 ;%表示搜索,B表示反向-back(F表示向前-forward),0为局部标号(0~99)
;================================================================================
;如果 EINT0 产生(这中断就是我们按键产生的), 就清除SDRAM ,不过好像没人会在这个时候按
;================================================================================
; check if EIN0 button is pressed
ldr r0,=GPFCON
ldr r1,=0x0 ;00 = Input
str r1,[r0]
ldr r0,=GPFUP
ldr r1,=0xff ;1- The pull up function is disabled.
str r1,[r0]
ldr r1,=GPFDAT
ldr r0,[r1]
bic r0,r0,#(0x1e<<1) ; bit clear
tst r0,#0x1
bne %F1 ;如果没有按,就跳到后面的1标号处 => Initialize stacks
; 这就是清零内存的代码
ldr r0,=GPFCON
ldr r1,=0x55aa
str r1,[r0]
; ldr r0,=GPFUP
; ldr r1,=0xff
; str r1,[r0]
ldr r0,=GPFDAT
ldr r1,=0x0
str r1,[r0] ;LED=****
mov r1,#0
mov r2,#0
mov r3,#0
mov r4,#0
mov r5,#0
mov r6,#0
mov r7,#0
mov r8,#0
ldr r9,=0x4000000 ;64MB
ldr r0,=0x30000000
0
stmia r0!,{r1-r8}
subs r9,r9,#32
bne %B0
;到这就结束了.
;//4.初始化各模式下的栈指针
;Initialize stacks
1
bl InitStacks
;=======================================================================
; 哈哈,下面又有看头了,这个初始化程序好像被名曰hzh的高手改过
; 能在NOR NAND 还有内存中运行,当然了,在内存中运行最简单了.
; 在NOR NAND中运行的话都要先把自己拷到内存中.
; 此外,还记得上面提到的|Image$RO$Base|,|Image$RO$Limit|...吗?
; 这就是拷贝的依据了!!!
;=========================================================================
;BWSCON的[2:1]反映了外部引脚OM[1:0]:若OM[1:0] != 00, 从NOR FLash启动或直接在内存运行;若OM[1:0]==00,则为Nand Flash Mode
ldr r0, =BWSCON
ldr r0, [r0]
ands r0, r0, #6 ; #6 == 0110 --> BWSCON[2:1]
bne copy_proc_beg ;OM[1:0] != 00,NOR FLash boot,不读取NAND FLASH
adr r0, ResetEntry ;否则,OM[1:0] == 0, 为从NAND FLash启动
cmp r0, #0 ;再比较入口是否为0地址处
;如果是0才是真正从NAND 启动,因为其4k被复制到0地址开始的stepingstone 内部sram中
; 注意adr得到的是 相对 地址,非绝对地址 == if use Multi-ice,
bne copy_proc_beg ;如果!=0,说明在using ice, 这种情况也不读取NAND FLASH. don't read nand flash for boot
;nop
;==============这一段代码完成从NAND Flash读代码到RAM=====================
nand_boot_beg ;
mov r5, #NFCONF ;首先设定NAND的一些控制寄存器
;set timing value
ldr r0, =(7<<12)|(7<<8)|(7<<4)
str r0, [r5]
;enable control
ldr r0, =(0<<13)|(0<<12)|(0<<10)|(0<<9)|(0<<8)|(1<<6)|(1<<5)|(1<<4)|(1<<1)|(1<<0)
str r0, [r5, #4]
bl ReadNandID ;按着读取NAND的ID号,结果保存在r5里
mov r6, #0 ;r6设初值0.
ldr r0, =0xec73 ;期望的NAND ID号
cmp r5, r0 ;这里进行比较
beq %F1 ;相等的话就跳到下一个1标号处
ldr r0, =0xec75 ;这是另一个期望值
cmp r5, r0
beq %F1 ;相等的话就跳到下一个1标号处
mov r6, #1 ;不相等,设置r6=1.
1
bl ReadNandStatus ;读取NAND状态,结果放在r1里
mov r8, #0 ; r8设初值0,意义为页号
ldr r9, =ResetEntry ; r9设初值为初始化程序入口地址
; 注意,在这里使用的是ldr伪指令,而不是上面用的adr伪指令,它加载的是ResetEntry
; 的绝对地址,也就是我们期望的RAM中的地址,在这里,它和|Image$RO$Base|一样
; 也就是说,我如我们编译程序时RO base指定的地址在RAM里,而把生成的文件拷到
; NAND里运行,由ldr加载的r9的值还是定位在内存. ???
2
ands r0, r8, #0x1f ;凡r8为0x1f(32)的整数倍-1,eq有效,ne无效
bne %F3 ;这句的意思是对每个块(32页)进行检错 -- 在每个块的开始页进行
mov r0, r8 ;r8->r0
bl CheckBadBlk ;检查NAND的坏区
cmp r0, #0 ;比较r0和0
addne r8, r8, #32 ;存在坏块的话就跳过这个坏块: + 32得到下一块. 故: r8 = blockpage addr,因为读写是按页进行的(每页512Byte)
bne %F4 ;然后跳到4进行循环条件判断。没有的话就跳到标号3处copy当前页
3
mov r0, r8 ;当前页号->r0
mov r1, r9 ;当前目标地址->r1
bl ReadNandPage ;读取该页的NAND数据到RAM
add r9, r9, #512 ;每一页的大小是512Bytes
add r8, r8, #1 ;r8指向下一页
4
cmp r8, #256 ;比较是否读完256页即128KBytes
;注意:这说明此程序默认拷贝128KByte的代码(by Tinko)
bcc %B2 ;如果r8小于256(没读完),就返回前面的标号2处
; now copy completed
mov r5, #NFCONF ;Disable NandFlash
ldr r0, [r5, #4]
bic r0, r0, #1
str r0, [r5, #4]
ldr pc, =copy_proc_beg ;调用copy_proc_beg
;个人认为应该为InitRam ?????????????????????????????
;===========================================================
copy_proc_beg
adrl r0, ResetEntry ;ResetEntry值->r0
;这里应该注意,使用的是adr,而不是ldr。使用ldr说明ResetEntry是个绝对地址,这个地址是在程序链接的时候
;确定的。而使用adr则说明ResetEntry的地址和当前代码的执行位置有关,它是一个相对的地址。比如这段代码
;在stepingstone里面执行,那么ResetEntry的地址就是零。如果在RAM里执行,那么ResetEntry就应是RAM的一个
;地址,应该等于RO base。
ldr r2, BaseOfROM ;BaseOfROM值(后面有定义)->r2
cmp r0, r2 ;比较 ResetEntry 和 BaseOfROM
ldreq r0, TopOfROM ;如果相等的话(在内存运行 --- ice -- 无需复制code区中的ro段,但需要复制code区中的rw段),TopOfROM->r0
beq InitRam ;同时跳到InitRam
;否则,下面开始复制code的RO段
;=========================================================
;下面这个是针对代码在NOR FLASH时的拷贝方法
;功能为把从ResetEntry起,TopOfROM-BaseOfROM大小的数据拷到BaseOfROM
;TopOfROM和BaseOfROM为|Image$RO$Limit|和|Image$RO$Base|
;|Image$RO$Limit|和|Image$RO$Base|由连接器生成
;为生成的代码的代码段运行时的起启和终止地址
;BaseOfBSS和BaseOfZero为|Image$RW$Base|和|Image$ZI$Base|
;|Image$RW$Base|和|Image$ZI$Base|也是由连接器生成
;两者之间就是初始化数据的存放地
; --在加载阶段,不存在ZI区域--
;=======================================================
ldr r3, TopOfROM
0
ldmia r0!, {r4-r7} ;开始时,r0 = ResetEntry --- source
stmia r2!, {r4-r7} ;开始时,r2 = BaseOfROM --- destination
cmp r2, r3 ;终止条件:复制了TopOfROM-BaseOfROM大小
bcc %B0
;---------------------------------------------------------------
; 下面2行,根据理解,由tinko添加
; 猜测上面的代码不应该用" ! ",以至于地址被修改。这里重新赋值
;---------------------------------------------------------------
adrl r0, ResetEntry ;don't use adr, 'cause out of range error occures
ldr r2, BaseOfROM
;旨在计算出正确的RW区起始位置
; 下面2行目的是为了计算正确的r0(必须使之指向code区中的rw域开始处)
sub r2, r2, r3 ;r2=BaseOfROM-TopOfROM=(-)代码长度
sub r0, r0, r2 ;r0=ResetEntry-(-)代码长度=ResetEntry+代码长度
InitRam
;复制代码加载位置中的RM区到|Image$RW$Base|
ldr r2, BaseOfBSS ;BaseOfBSS->r2 , BaseOfBSS = |Image$RW$Base|
ldr r3, BaseOfZero ;BaseOfZero->r3 , BaseOfZero = |Image$ZI$Base|
0
cmp r2, r3 ;比较BaseOfBSS和BaseOfZero
ldrcc r1, [r0], #4 ;当代码在内存中运行时,r0(初始值) = TopOfROM.这之后的BaseOfZero-BaseOfBSS仍属于code,需拷贝到BaseOfBSS
strcc r1, [r2], #4
bcc %B0
;用0初始化ZI区
mov r0, #0
ldr r3, EndOfBSS ;EndOfBSS = |Image$ZI$Limit|
1
cmp r2, r3
strcc r0, [r2], #4
bcc %B1
;要是r21 ; means Fclk:Hclk is not 1:1.
; bl MMU_SetAsyncBusMode
; |
; bl MMU_SetFastBusMode ; default value.
; ]
;bl Led_Test
;===========================================================
; 进入C语言前的最后一步了,就是把我们用说查二级向量表
; 的中断例程安装到一级向量表(异常向量表)里.
;//5.设置缺省中断处理函数
; Setup IRQ handler
ldr r0,=HandleIRQ ;This routine is needed
ldr r1,=IsrIRQ ;if there isn't 'subs pc,lr,#4' at 0x18, 0x1c
str r1,[r0]
;//initialize the IRQ 将普通中断判断程序的入口地址给HandleIRQ
;//
;注意,以下这段可能不需要!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
;//6.将数据段拷贝到ram中 将零初始化数据段清零跳入C语言的main函数执行到这步结束bootloader初步引导结束
;If main() is used, the variable initialization will be done in __main().
[ {FALSE} ;by tinko -- 最外面的条件由tinko添加,实际上不再执行这段
[ :LNOT:USE_MAIN ;initialized {FALSE}
;Copy and paste RW data/zero initialized data
LDR r0, =|Image$RO$Limit| ; Get pointer to ROM data
LDR r1, =|Image$RW$Base| ; and RAM copy
LDR r3, =|Image$ZI$Base|
;Zero init base => top of initialised data
CMP r0, r1 ; Check that they are different just for debug??????????????????????????
BEQ %F2
1
CMP r1, r3 ; Copy init data
LDRCC r2, [r0], #4 ;--> LDRCC r2, [r0] + ADD r0, r0, #4
STRCC r2, [r1], #4 ;--> STRCC r2, [r1] + ADD r1, r1, #4
BCC %B1
2
LDR r1, =|Image$ZI$Limit| ; Top of zero init segment
MOV r2, #0
3
CMP r3, r1 ; Zero init
STRCC r2, [r3], #4
BCC %B3
]
]
;!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
;***************************************
;by tinko
[ {TRUE} ;得有些表示了,该点点LED灯了
;rGPFDAT = (rGPFDAT & ~(0xf<<4)) | ((~data & 0xf)<<4);
; Led_Display
ldr r0,=GPFCON
ldr r1,=0x5500
str r1,[r0]
ldr r0,=GPFDAT
ldr r1,=0xe0
str r1,[r0]
ldr r2, =0xffffffff;
1
sub r2,r2,#1
bne %b1
ldr r0,=GPFDAT
ldr r1,=0xe0
;b . ;die here
]
;*****************************************
;*****************************************************************************
;!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
; 妈呀,终说见到艳阳天了!!!!!!!!!!
; 跳到C语言的main函数处了.
;!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
;*****************************************************************************
[ :LNOT:THUMBCODE ;if thumbcode={false} bl main L代表logic变量
bl Main ;Don't use main() because ......
b . ;注意小圆点
]
;//if thumbcod={ture}
[ THUMBCODE ;for start-up code for Thumb mode
orr lr,pc,#1
bx lr
CODE16
bl Main ;Don't use main() because ......
b . ;注意小圆点
CODE32
]
;function initializing stacks
InitStacks
;Don't use DRAM,such as stmfd,ldmfd......
;SVCstack is initialized before
;Under toolkit ver 2.5, 'msr cpsr,r1' can be used instead of 'msr cpsr_cxsf,r1'
mrs r0,cpsr
bic r0,r0,#MODEMASK
orr r1,r0,#UNDEFMODE|NOINT
msr cpsr_cxsf,r1 ;UndefMode
ldr sp,=UndefStack ; UndefStack=0x33FF_5C00
orr r1,r0,#ABORTMODE|NOINT
msr cpsr_cxsf,r1 ;AbortMode
ldr sp,=AbortStack ; AbortStack=0x33FF_6000
orr r1,r0,#IRQMODE|NOINT
msr cpsr_cxsf,r1 ;IRQMode
ldr sp,=IRQStack ; IRQStack=0x33FF_7000
orr r1,r0,#FIQMODE|NOINT
msr cpsr_cxsf,r1 ;FIQMode
ldr sp,=FIQStack ; FIQStack=0x33FF_8000
bic r0,r0,#MODEMASK|NOINT
orr r1,r0,#SVCMODE
msr cpsr_cxsf,r1 ;SVCMode
ldr sp,=SVCStack ; SVCStack=0x33FF_5800
;USER mode has not be initialized.
;//为什么不用初始化user的stacks,系统刚启动的时候运行在哪个模式下?
mov pc,lr
;The LR register won't be valid if the current mode is not SVC mode.?
;//系统一开始运行就是SVCmode?
;===========================================================
ReadNandID
mov r7,#NFCONF
ldr r0,[r7,#4] ;NFChipEn();
bic r0,r0,#2
str r0,[r7,#4]
mov r0,#0x90 ;WrNFCmd(RdIDCMD);
strb r0,[r7,#8]
mov r4,#0 ;WrNFAddr(0);
strb r4,[r7,#0xc]
1 ;while(NFIsBusy());
ldr r0,[r7,#0x20]
tst r0,#1
beq %B1
ldrb r0,[r7,#0x10] ;id = RdNFDat()<<8;
mov r0,r0,lsl #8
ldrb r1,[r7,#0x10] ;id |= RdNFDat();
orr r5,r1,r0
ldr r0,[r7,#4] ;NFChipDs();
orr r0,r0,#2
str r0,[r7,#4]
mov pc,lr
ReadNandStatus
mov r7,#NFCONF
ldr r0,[r7,#4] ;NFChipEn();
bic r0,r0,#2
str r0,[r7,#4]
mov r0,#0x70 ;WrNFCmd(QUERYCMD);
strb r0,[r7,#8]
ldrb r1,[r7,#0x10] ;r1 = RdNFDat();
ldr r0,[r7,#4] ;NFChipDs();
orr r0,r0,#2
str r0,[r7,#4]
mov pc,lr
WaitNandBusy
mov r0,#0x70 ;WrNFCmd(QUERYCMD);
mov r1,#NFCONF
strb r0,[r1,#8]
1 ;while(!(RdNFDat()&0x40));
ldrb r0,[r1,#0x10]
tst r0,#0x40
beq %B1
mov r0,#0 ;WrNFCmd(READCMD0);
strb r0,[r1,#8]
mov pc,lr
CheckBadBlk
mov r7, lr
mov r5, #NFCONF
bic r0,r0,#0x1f ;addr &= ~0x1f;
ldr r1,[r5,#4] ;NFChipEn()
bic r1,r1,#2
str r1,[r5,#4]
mov r1,#0x50 ;WrNFCmd(READCMD2)
strb r1,[r5,#8]
mov r1, #5;6 ;6->5
strb r1,[r5,#0xc] ;WrNFAddr(5);(6) 6->5
strb r0,[r5,#0xc] ;WrNFAddr(addr)
mov r1,r0,lsr #8 ;WrNFAddr(addr>>8)
strb r1,[r5,#0xc]
cmp r6,#0 ;if(NandAddr)
movne r0,r0,lsr #16 ;WrNFAddr(addr>>16)
strneb r0,[r5,#0xc]
; bl WaitNandBusy ;WaitNFBusy()
;do not use WaitNandBusy, after WaitNandBusy will read part A!
mov r0, #100
1
subs r0, r0, #1
bne %B1
2
ldr r0, [r5, #0x20]
tst r0, #1
beq %B2
ldrb r0, [r5,#0x10] ;RdNFDat()
sub r0, r0, #0xff
mov r1,#0 ;WrNFCmd(READCMD0)
strb r1,[r5,#8]
ldr r1,[r5,#4] ;NFChipDs()
orr r1,r1,#2
str r1,[r5,#4]
mov pc, r7
ReadNandPage
mov r7,lr
mov r4,r1
mov r5,#NFCONF
ldr r1,[r5,#4] ;NFChipEn()
bic r1,r1,#2
str r1,[r5,#4]
mov r1,#0 ;WrNFCmd(READCMD0)
strb r1,[r5,#8]
strb r1,[r5,#0xc] ;WrNFAddr(0)
strb r0,[r5,#0xc] ;WrNFAddr(addr)
mov r1,r0,lsr #8 ;WrNFAddr(addr>>8)
strb r1,[r5,#0xc]
cmp r6,#0 ;if(NandAddr)
movne r0,r0,lsr #16 ;WrNFAddr(addr>>16)
strneb r0,[r5,#0xc]
ldr r0,[r5,#4] ;InitEcc()
orr r0,r0,#0x10
str r0,[r5,#4]
bl WaitNandBusy ;WaitNFBusy()
mov r0,#0 ;for(i=0; i<512; i++)
1
ldrb r1,[r5,#0x10] ;buf[i] = RdNFDat()
strb r1,[r4,r0]
add r0,r0,#1
bic r0,r0,#0x10000
cmp r0,#0x200
bcc %B1
ldr r0,[r5,#4] ;NFChipDs()
orr r0,r0,#2
str r0,[r5,#4]
mov pc,r7
;--------------------LED test
EXPORT Led_Test
Led_Test
mov r0, #0x56000000
mov r1, #0x5500
str r1, [r0, #0x50]
0
mov r1, #0x50
str r1, [r0, #0x54]
mov r2, #0x100000
1
subs r2, r2, #1
bne %B1
mov r1, #0xa0
str r1, [r0, #0x54]
mov r2, #0x100000
2
subs r2, r2, #1
bne %B2
b %B0
mov pc, lr
;===========================================================
;=====================================================================
; Clock division test
; Assemble code, because VSYNC time is very short
;=====================================================================
EXPORT CLKDIV124
EXPORT CLKDIV144
CLKDIV124
ldr r0, = CLKDIVN
ldr r1, = 0x3 ; 0x3 = 1:2:4
str r1, [r0]
; wait until clock is stable
nop
nop
nop
nop
nop
ldr r0, = REFRESH
ldr r1, [r0]
bic r1, r1, #0xff
bic r1, r1, #(0x7<<8)
orr r1, r1, #0x470 ; REFCNT135
str r1, [r0]
nop
nop
nop
nop
nop
mov pc, lr
CLKDIV144
ldr r0, = CLKDIVN
ldr r1, = 0x4 ; 0x4 = 1:4:4
str r1, [r0]
; wait until clock is stable
nop
nop
nop
nop
nop
ldr r0, = REFRESH
ldr r1, [r0]
bic r1, r1, #0xff
bic r1, r1, #(0x7<<8)
orr r1, r1, #0x630 ; REFCNT675 - 1520
str r1, [r0]
nop
nop
nop
nop
nop
mov pc, lr
;存储器控制寄存器的定义区
LTORG
SMRDATA DATA
; Memory configuration should be optimized for best performance
; The following parameter is not optimized.
; Memory access cycle parameter strategy
; 1) The memory settings is safe parameters even at HCLK=75Mhz.
; 2) SDRAM refresh period is for HCLK<=75Mhz.
DCD (0+(B1_BWSCON<<4)+(B2_BWSCON<<8)+(B3_BWSCON<<12)+(B4_BWSCON<<16)+(B5_BWSCON<<20)+(B6_BWSCON<<24)+(B7_BWSCON<<28)) ;各bank的bus width; 没有B0,因为由OM[1:0]pins 确定
DCD ((B0_Tacs<<13)+(B0_Tcos<<11)+(B0_Tacc<<8)+(B0_Tcoh<<6)+(B0_Tah<<4)+(B0_Tacp<<2)+(B0_PMC)) ;GCS0
DCD ((B1_Tacs<<13)+(B1_Tcos<<11)+(B1_Tacc<<8)+(B1_Tcoh<<6)+(B1_Tah<<4)+(B1_Tacp<<2)+(B1_PMC)) ;GCS1
DCD ((B2_Tacs<<13)+(B2_Tcos<<11)+(B2_Tacc<<8)+(B2_Tcoh<<6)+(B2_Tah<<4)+(B2_Tacp<<2)+(B2_PMC)) ;GCS2
DCD ((B3_Tacs<<13)+(B3_Tcos<<11)+(B3_Tacc<<8)+(B3_Tcoh<<6)+(B3_Tah<<4)+(B3_Tacp<<2)+(B3_PMC)) ;GCS3
DCD ((B4_Tacs<<13)+(B4_Tcos<<11)+(B4_Tacc<<8)+(B4_Tcoh<<6)+(B4_Tah<<4)+(B4_Tacp<<2)+(B4_PMC)) ;GCS4
DCD ((B5_Tacs<<13)+(B5_Tcos<<11)+(B5_Tacc<<8)+(B5_Tcoh<<6)+(B5_Tah<<4)+(B5_Tacp<<2)+(B5_PMC)) ;GCS5
DCD ((B6_MT<<15)+(B6_Trcd<<2)+(B6_SCAN)) ;GCS6 B6_MT定义在memcfg.inc中,11-->SDRAM ; B6_SCAN - 非reset 默认值
DCD ((B7_MT<<15)+(B7_Trcd<<2)+(B7_SCAN)) ;GCS7
DCD ((REFEN<<23)+(TREFMD<<22)+(Trp<<20)+(Trc<<18)+(Tchr<<16)+REFCNT) ;Tchr- not used
;DCD 0x32 ;SCLK power saving mode, BANKSIZE 128M/128M
DCD 0x31 ;SCLK power saving mode, BANKSIZE 64M/64M
DCD 0x30 ;MRSR6 CL=3clk
DCD 0x30 ;MRSR7 CL=3clk
BaseOfROM DCD |Image$RO$Base|
TopOfROM DCD |Image$RO$Limit|
BaseOfBSS DCD |Image$RW$Base|
BaseOfZero DCD |Image$ZI$Base|
EndOfBSS DCD |Image$ZI$Limit|
ALIGN
AREA RamData, DATA, READWRITE
^ _ISR_STARTADDRESS ; _ISR_STARTADDRESS=0x33FF_FF00
HandleReset # 4
HandleUndef # 4
HandleSWI # 4
HandlePabort # 4
HandleDabort # 4
HandleReserved # 4
HandleIRQ # 4
HandleFIQ # 4
;Don't use the label 'IntVectorTable',
;The value of IntVectorTable is different with the address you think it may be.
;IntVectorTable
;@0x33FF_FF20
HandleEINT0 # 4
HandleEINT1 # 4
HandleEINT2 # 4
HandleEINT3 # 4
HandleEINT4_7 # 4
HandleEINT8_23 # 4
HandleCAM # 4 ; Added for 2440.
HandleBATFLT # 4
HandleTICK # 4
HandleWDT # 4
HandleTIMER0 # 4
HandleTIMER1 # 4
HandleTIMER2 # 4
HandleTIMER3 # 4
HandleTIMER4 # 4
HandleUART2 # 4
;@0x33FF_FF60
HandleLCD # 4
HandleDMA0 # 4
HandleDMA1 # 4
HandleDMA2 # 4
HandleDMA3 # 4
HandleMMC # 4
HandleSPI0 # 4
HandleUART1 # 4
HandleNFCON # 4 ; Added for 2440.
HandleUSBD # 4
HandleUSBH # 4
HandleIIC # 4
HandleUART0 # 4
HandleSPI1 # 4
HandleRTC # 4
HandleADC # 4
;@0x33FF_FFA0
END
相关文章:
-Linux ARM驱动编程第二天-arm ads下的start.S分析(物联技术666))
嵌入式培训机构四个月实训课程笔记(完整版)-Linux ARM驱动编程第二天-arm ads下的start.S分析(物联技术666)
链接:https://pan.baidu.com/s/1E4x2TX_9SYhxM9sWfnehMg?pwd1688 提取码:1688 ; ; NAME: 2440INIT.S ; DESC: C start up codes ; Configure memory, ISR ,stacks ; Initialize C-variables ; 完全注释 ; HISTORY: ; 2002.02.25:kwtark: ver 0.…...
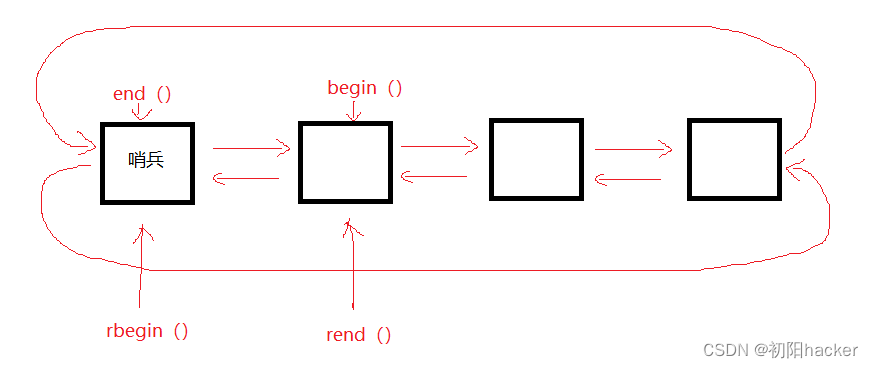
STL之list容器的介绍与模拟实现+适配器
STL之list容器的介绍与模拟实现适配器 1. list的介绍2. list容器的使用2.1 list的定义2.2 list iterator的使用2.3 list capacity2.4 list element access2.5 list modifiers2.6 list的迭代器失效 3. list的模拟实现3.1 架构搭建3.2 迭代器3.2.1 正向迭代器3.2.2反向迭代器适配…...

Leetcode With Golang 二叉树 part1
这一部分主要来梳理二叉树题目最简单最基础的部分,包括遍历,一些简单题目。 一、Leecode 144 - 二叉树的前序遍历 https://leetcode.cn/problems/binary-tree-preorder-traversal/description/ 二叉树的遍历是入门。我们需要在程序一开始就创建一个空…...
tcp 中使用的定时器
定时器的使用场景主要有两种。 (1)周期性任务 这是定时器最常用的一种场景,比如 tcp 中的 keepalive 定时器,起到 tcp 连接的两端保活的作用,周期性发送数据包,如果对端回复报文,说明对端还活着…...
黑马Java——IO流
一、IO流的概述 IO流:存储和读取数据的解决方案 IO流和File是息息相关的 1、IO流的分类 1.1、纯文本文件 word、Excel不是纯文本文件 而txt或者md文件是纯文本文件 2、小结 二、IO流的体系结构 三、字节流 1、FileOutputStream(字节输出流ÿ…...

re:从0开始的CSS学习之路 11. 盒子垂直布局
1. 盒子的垂直布局的注意 若两个“相邻”垂直摆放的盒子,上面盒子的下外边距与下面盒子的上外边距会发生重叠,称为外边距合并 若合并后,外边距会选择重叠外边距的较大值 若两个盒子具有父子关系,则两个盒子的上外边距会发生重叠&…...

Kindling-OriginX 如何集成 DeepFlow 的数据增强网络故障的解释力
DeepFlow 是基于 eBPF 的可观测性开源项目,旨在为复杂的云基础设施及云原生应用提供深度可观测性。DeepFlow 基于 eBPF 采集了精细的链路追踪数据和网络、应用性能指标,其在网络路径上的全链路覆盖能力和丰富的 TCP 性能指标能够为专业用户和网络领域专家…...

轻松掌握Jenkins执行远程window的Jmeter接口脚本
Windows环境:10.1.2.78 新建与配置节点 【系统管理】—【管理节点】—【新建节点】输入节点名称,勾选“dumb slave”,点击ok 按如上配置: 说明: Name:定义slave的唯一名称标识,可以是任意字…...
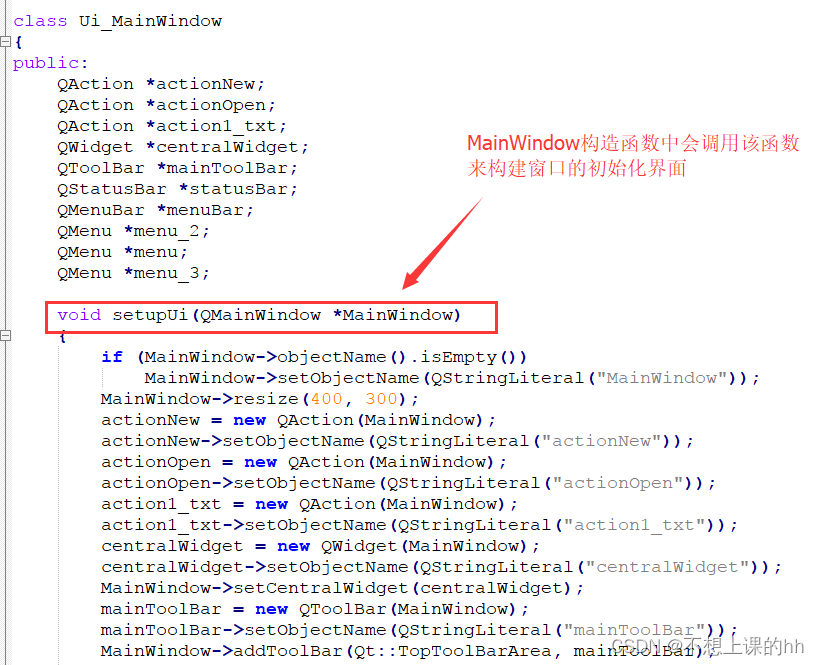
UI文件原理
使用UI文件创建界面很轻松很便捷,他的原理就是每次我们保存UI文件的时候,QtCreator就自动帮我们将UI文件翻译成C的图形界面创建代码。可以通过以下步骤查看代码 到工程编译目录,一般就是工程同级目录下会生成另一个编译目录,会找到…...
OS设备管理
设备管理 操作系统作为系统资源的管理者,其提供的功能有:处理机管理、存储器管理、文件管理、设备管理。其中前三个管理都是在计算机的主机内部管理其相对应的硬件。 I/O设备 I/O即输入/输出。I/O设备即可以将数据输入到计算机,或者可以接收…...

Matlab绘图经典代码大全:条形图、极坐标图、玫瑰图、填充图、饼状图、三维网格云图、等高线图、透视图、消隐图、投影图、三维曲线图、函数图、彗星图
学会 MATLAB 中的绘图命令对初学者来说具有重要意义,主要体现在以下几个方面: 1. 数据可视化。绘图命令是 MATLAB 中最基本也是最重要的功能之一,它可以帮助初学者将数据可视化,更直观地理解数据的分布、变化规律和趋势。通过绘制图表,可以快速了解数据的特征,从而为后续…...

姿态传感器MPU6050模块之陀螺仪、加速度计、磁力计
MEMS技术 微机电系统(MEMS, Micro-Electro-Mechanical System),也叫做微电子机械系统、微系统、微机械等,指尺寸在几毫米乃至更小的高科技装置。微机电系统其内部结构一般在微米甚至纳米量级,是一个独立的智能系统。 微…...
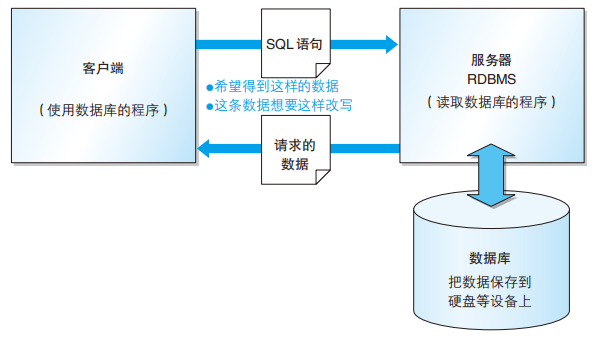
MySQL 基础知识(一)之数据库和 SQL 概述
目录 1 数据库相关概念 2 数据库的结构 3 SQL 概要 4 SQL 的基本书写规则 1 数据库相关概念 数据库是将大量的数据保存起来,通过计算机加工而成的可以进行高效访问的数据集合数据库管理系统(DBMS)是用来管理数据库的计算机系统…...

挑战杯 wifi指纹室内定位系统
简介 今天来介绍一下室内定位相关的原理以及实现方法; WIFI全称WirelessFidelity,在中文里又称作“行动热点”,是Wi-Fi联盟制造商的商标做为产品的品牌认证,是一个创建于IEEE 802.11标准的无线局域网技术。基于两套系统的密切相关ÿ…...

Midjourney提示词风格调试测评
在Midjourney中提示词及风格参数的变化无疑会对最终的作品产生影响,那影响具体有多大?今天我我们将通过一个示例进行探究。 示例提示词: 计算机代码海洋中的黄色折纸船(图像下方)风格参考:金色长发的女人,…...
Codeforces Round 926 (Div. 2)(A~C)
A. Sasha and the Beautiful Array 分析:说实话,打比赛的时候看到这题没多想,过了一下样例发现将数组排序一下就行,交了就过了。刚刚写题解反应过来,a2-a1a3-a2.....an-a(n-1) an - a1,所以最后结果只取决…...
Godot 游戏引擎个人评价和2024年规划(无代码)
文章目录 前言Godot C# .net core 开发简单评价Godot相关网址可行性 Godot(GDScirpt) Vs CocosGodot VS UnityUnity 的裁员Unity的股票Unity的历史遗留问题:Mono和.net core.net core的开发者,微软 个人的独立游戏Steam平台分成说明独立游戏的选题美术风…...

Win11关闭Windows Defender实时保护,暂时关闭和永久关闭方法 | Win10怎么永久关闭Windows Defender实时保护
文章目录 1. 按2. 暂时关闭Windows Defender实时保护3. 永久关闭实时保护 1. 按 开启Windows Defender实时保护有时候会导致系统变得异常卡顿,严重影响系统的流畅度,并且由于会有几率错误拦截和查杀我们的正常操作,所以还会导致我们的程序无…...

C# CAD2016 宗地生成界址点,界址点编号及排序
1 、界址点起点位置C# CAD2016 多边形顶点按方向重新排序 2、 界址点顺时针逆时针走向 C# CAD2016 判断多边形的方向正时针或逆时针旋转 3、块文件插入 //已知块文件名称 GXGLQTC //块文件需要插入的坐标点 scaledPoint// 插入块到当前图纸中的指定位置ObjectId newBlockId;B…...

[ai笔记7] google浏览器ai学习提效定制优化+常用插件推荐
欢迎来到文思源想的ai空间,这是技术老兵重学ai以及成长思考的第7篇分享! 工欲善其事必先利其器,为了ai学习的效能提升,放假期间对google浏览器做了一次系统整改,添加了一些配置和插件,这里既有一些显示、主…...

NVIDIA开发环境自动化构建:从CUDA、cuDNN版本对齐到可复现环境管理
1. 项目概述:一个面向开发者的NVIDIA环境构建工具最近在折腾一些AI相关的本地实验,发现配置一个稳定、高效的NVIDIA开发环境,尤其是CUDA、cuDNN这些核心组件的版本对齐,真是一件让人头疼的事情。相信很多做机器学习、深度学习或者…...

Postman便携版终极指南:绿色免安装的Windows API测试工具
Postman便携版终极指南:绿色免安装的Windows API测试工具 【免费下载链接】postman-portable 🚀 Postman portable for Windows 项目地址: https://gitcode.com/gh_mirrors/po/postman-portable Postman便携版是一款专为Windows用户设计的绿色免安…...

RISC-V RT-Thread Smart用户态应用编译与QEMU运行实战指南
1. 项目概述:从内核到应用的完整RISC-V生态体验最近在折腾RT-Thread Smart(简称RTT-Smart)这个微内核实时操作系统,目标平台是qemu模拟的64位RISC-V虚拟机(qemu-virt64-riscv)。整个过程的核心,…...

倒置百分比堆叠面积图表示列详解|Highcharts大气成分图表代码
这是一个基于 Highcharts 实现的水平面积曲线图(areaspline 倒置坐标系),专门用于展示不同高度下地球大气成分的体积占比变化,是典型的百分比堆叠面积图,数据直观反映了大气层随高度升高的成分分布规律。我会从图表结…...

基于MCP协议构建AI支付网关:连接Clawd与智能体的实践指南
1. 项目概述:一个连接Clawd与MCP的支付网关 最近在折腾一个很有意思的开源项目,叫 clawdpay-mcp 。这个项目在GitHub上由 Rishab87 维护,乍一看名字有点拗口,但拆解一下就能明白它的核心价值: clawdpay 和 M…...

SNMP 实战:从基础命令到高效监控场景应用
1. SNMP基础:从零开始理解网络监控的核心协议 第一次接触SNMP时,我也被那些数字串和术语搞得一头雾水。简单来说,SNMP就像是你给网络设备安装了一个"话筒",让它能主动汇报自己的状态。这个协议已经存在了30多年…...

【技术解析】VadCLIP:如何让视觉语言模型“看懂”视频异常?
1. VadCLIP是什么?为什么视频异常检测需要它? 想象一下你正在监控室盯着几十块屏幕,突然有个画面闪过一个可疑行为——可能是打架、偷窃或者交通事故。传统监控系统要么依赖人工盯屏(容易疲劳漏检),要么使用…...

如何快速解决AKShare股票数据获取失败:完整的数据采集优化指南
如何快速解决AKShare股票数据获取失败:完整的数据采集优化指南 【免费下载链接】akshare AKShare is an elegant and simple financial data interface library for Python, built for human beings! 开源财经数据接口库 项目地址: https://gitcode.com/gh_mirror…...

2025年macOS菜单栏终极管理方案:开源神器Ice让你的工作区重获新生
2025年macOS菜单栏终极管理方案:开源神器Ice让你的工作区重获新生 【免费下载链接】Ice Powerful menu bar manager for macOS 项目地址: https://gitcode.com/GitHub_Trending/ice/Ice macOS菜单栏管理工具Ice是一款完全免费的开源神器,专为现代…...
)
NotebookLM思维导图生成响应延迟超8秒?92%用户忽略的3个文档预处理致命陷阱(附自动化清洗脚本)
更多请点击: https://intelliparadigm.com 第一章:NotebookLM思维导图生成响应延迟超8秒?现象复现与归因定位 在 NotebookLM v2.3.1 环境中,用户频繁反馈「思维导图生成」功能存在显著延迟——实测端到端响应时间普遍达 8.2–14.…...