【XR806开发板试用】+移植rosserial到XR806
1 XR806简介
板子来源于极术社区的试用,XR806的在线网址
其主要参数:
| 主控 | XR806AF2L |
|---|---|
| DDR | SIP 288KB SRAM |
| 存储 | SIP 160KB Code ROM. SIP 16Mbit Flash. |
| 天线 | 板载WiFi/BT双天线,可共存 |
| 按键 | reboot按键 1,功能按键 1 |
| 灯 | 红色电源指示灯 1,蓝色可调节LED 1 |
| 供电 | Type-C 5V |
| 引脚 | 插针引脚 *9 |
| 调试方式 | Type-C(已板载串口转USB芯片) |
| 晶振 | 外接40MHz晶振 |
2 rosserial简介
官网
rosserial是用于非ROS设备与ROS设备进行通信的一种协议。它为非ROS设备的应用程序提供了ROS节点和服务的发布/订阅功能,使在非ROS环境中运行的应用能够通过串口或网络能够轻松地与ROS应用进行数据交互。
rosserial分为客户端和服务器两部分。rosserial客户端运行在运行在没有安装ROS的环境的应用中,通过串口或网络与运行在ROS环境中的rosserial服务器连接,并通过服务器节点在ROS中发布/订阅话题。
3 移植目标
通过rosserial使XR806能通过串口和TCP两种方式和ROS进行通信。
4 移植前准备
4.1 源码获取
[官方源码]( https://github.com/ros-drivers/rosserial.git
该仓库中的代码需要编译才能获取源码,为了直接获取源码,使用以下仓库的源码做为基础。
使用源码
该代码时属于RT-thread软件包,有较高的可信度。
clone下来的代码放在/ohosdemo/rosserial中,文件结构:
tree -L 1
tree -L 1.
├── BUILD.gn
├── inc
├── port
└── src- BUILD.gn :配置文件
- inc :rosserial源文件
- port:移植文件(为了和XR806适配的代码放在该文件下)
4.2 XR806 C++支持
rosserial为C++代码,需要XR806支持C++编译。
- 修改
/device/xradio/xr806/liteos_m/config.gni文件,添加以下内容:
board_cxx_flags = []board_cxx_flags += SDK_cflags
board_cxx_flags += ["-includelog/log.h","-DVIRTUAL_HCI","-DCONFIG_ARM",#"-DNULL=((void*)0)",#"-std=c++17","-lstdc++","-fno-rtti","-fno-exceptions"]
大部分和board_cflags的配置一样,添加的编译项 "-lstdc++",-fno-rtti,-fno-exception是为了解决以下错误:
undefined reference to `vtable for __cxxabiv1::__si_class_type_info'
该错误的原因是C++在链接时会有相关库链接不上
2. 在/ohosdemo/rosserial/BUILD.gn中添加以下代码:
cflags_cc = board_cxx_flags
表示支持c++编译
5 ROSserial移植核心
根据官网的移植介绍,只需要填写完以下模板即可:
class Hardware
{Hardware();// any initialization code necessary to use the serial portvoid init(); // read a byte from the serial port. -1 = failureint read()// write data to the connection to ROSvoid write(uint8_t* data, int length);// returns milliseconds since start of programunsigned long time();};
init():提供初始化函数,初始化串口或者TCP网络read():读取一个字节write(uint8_t* data, int length):写字符time():提供时间基准
6 串口通信
和串口相关的代码放在rosserial/port/UartHaedware.h
关键代码:
6.1 串口初始化:init()函数
void init(){// HAL_Status status = HAL_ERROR;UART_InitParam param;param.baudRate = this->baudRate;param.dataBits = UART_DATA_BITS_8;param.stopBits = UART_STOP_BITS_1;param.parity = UART_PARITY_NONE;param.isAutoHwFlowCtrl = 0;HAL_UART_Init(UARTID, ¶m);}
6.2 串口读取一个字节:read()函数
int read(){uint8_t rx_data;int32_t len=0;len = HAL_UART_Receive_IT(UARTID,&rx_data,1,1000);if(len>0){return rx_data;}else return -1;}6.3 串口写字节:write(uint8_t* data, int length)
// write data to the connection to ROSvoid write(uint8_t* data, int length){HAL_UART_Transmit_IT(UARTID, data, length);}
6.4 时间基准:time()函数
// returns milliseconds since start of programunsigned long time(){unsigned long temp = (unsigned long)OS_GetTime() * 1000;return temp;}
6.5 代码风格统一
为了保持ROS代码的编写风格一致,添加``rosserial/port/ros.h`
关键代码:
#define ROS_USE_TCP 0
#define ROS_USE_UART 1namespace ros
{#if ROS_USE_TCP == 1typedef NodeHandle_<TCPHardware> NodeHandle;#endif#if ROS_USE_UART == 1typedef NodeHandle_<Hardware> NodeHandle;#endif
}
#endif
可以通过宏定义选择使用串口还是TCP
7 TCP通信
7.1 wifi连接
wifi连接使用官方在ohosdemo/wlan_demo中的代码。具体使用void wifi_device_event_test()函数和wifi连接成功后的回调函数:void Connected_deal(int state, WifiLinkedInfo *info)。
大致思路是在wifi连接线程中增加一个信号量,初始化信号量为0,rosserial线程会一直等待信号量有效后才会触发rosserial的相关函数,利用信号量作为两个线程间的同步,保证wifi顺利连接成功后才会进行rosserial的TCP通信。另外每次wifi重新连接后都会保证XR806会自动连接ROS。
信号量的三个关键函数:
-
OS_Status OS_SemaphoreCreate(OS_Semaphore_t *sem, uint32_t initCount, uint32_t maxCount)初始化信号量,定义计数的初始值和最大值 -
OS_Status OS_SemaphoreWait(OS_Semaphore_t *sem, OS_Time_t waitMS)等待信号量有效,及信号量的计数不为0;等待时间可以使无限长,该参数为OS_WAIT_FOREVER -
OS_Status OS_SemaphoreRelease(OS_Semaphore_t *sem)释放信号量,信号量计数加1;主要代码:
#define WIFI_DEVICE_CONNECT_AP_SSID "myyy" #define WIFI_DEVICE_CONNECT_AP_PSK "123456789"WifiEvent sta_event;void Connected_deal(int state, WifiLinkedInfo *info) {if (state == WIFI_STATE_AVALIABLE) {//释放信号量,计数加1OS_SemaphoreRelease(&ros_sem);// OS_Sleep(5);printf("\r\n======== Callback: connected========\r\n");} else if (state == WIFI_STATE_NOT_AVALIABLE) {printf("======== Callback: disconnected\n");} }void wifi_device_event_test() {const char ssid_want_connect[] = WIFI_DEVICE_CONNECT_AP_SSID;const char psk[] = WIFI_DEVICE_CONNECT_AP_PSK;//创建信号量:初始值为0,最大值为2if(OS_SemaphoreCreate(&ros_sem, 0, 2) != OS_OK){printf("\r\n sem creat fail!\r\n");return ;}sta_event.OnWifiConnectionChanged = Connected_deal;if (WIFI_SUCCESS != RegisterWifiEvent(&sta_event)) {printf("Error: RegisterWifiEvent fail\n");return;}printf("\n=========== Connect Test Start ===========\n");if (WIFI_SUCCESS != EnableWifi()) {printf("Error: EnableWifi fail.\n");return;}printf("EnableWifi Success.\n");if (WIFI_STA_ACTIVE == IsWifiActive())printf("Wifi is active.\n");OS_Sleep(1);/*.........................................................省略的代码 参见官方demo*/if (WIFI_SUCCESS != GetDeviceMacAddress(get_mac_res)) {printf("Error: GetDeviceMacAddress Fail\n");return;}printf("GetDeviceMacAddress Success.\n");for (int j = 0; j < WIFI_MAC_LEN - 1; j++) {printf("%02X:", get_mac_res[j]);}printf("%02X\n", get_mac_res[WIFI_MAC_LEN - 1]);}
7.2 TCP客户端初始化
为了不和串口的Hardware类重名,类名为TCPHardware
void init(){sock_fd = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP);// address info!struct sockaddr_in server_addr;memset(&server_addr, 0, sizeof(server_addr));server_addr.sin_family = AF_INET;server_addr.sin_port = htons(serverPort_);inet_pton(AF_INET, server_, &server_addr.sin_addr);// connect!if (connect(sock_fd, (sockaddr *)&server_addr, sizeof(server_addr)) < 0){printf("connect tcp_server failed! \r\n");return;}printf("connect tcp_server successfuly! \r\n");}
7.3 TCP读取字节
int read(){char ch[2];int bytes_received = recv(sock_fd, ch, 1, 0);if (bytes_received > 0){return ch[0];}else{return -1;}}7.4 TCP写字节
void write(const uint8_t *data, int length){send(sock_fd, data, length, 0);}
时间基准和6.4一样
8 测试
8.1 XR806 端
文件目录:
.
├── BUILD.gn
├── led_demo
│ ├── BUILD.gn
│ └── src
├── rosserial
│ ├── BUILD.gn
│ ├── inc
│ ├── port
│ └── src
└── wlan_demo├── BUILD.gn├── main.c├── test_case.c└── test_case.h其中:
led_demo:led灯,指示作用rosserial:rosserialb包wlan_demo:负载wifi连接
8.1.1 配置文件BUILD.gn
# 必须,config中定义了头文件路径和关键宏定义
import("//device/xradio/xr806/liteos_m/config.gni")# 必须,所有应用工程必须是app_打头
static_library("app_rosserial")
{configs = []sources = ["src/ros_helloworld.cpp","inc/duration.cpp","inc/time.cpp",]#必须,board_cflags是在config.gni中定义的关键宏定义cflags = board_cflags# c++cflags_cc = board_cxx_flags#必须,board_include_dirs是在config.gni中定义的文件路径include_dirs = board_include_dirs# 根据实际情况添加头文件路径include_dirs += ["//kernel/liteos_m/kernel/arch/include","./../wlan_demo/","inc","port" ,"//base/iot_hardware/peripheral/interfaces/kits","//foundation/communication/wifi_lite/interfaces/wifiservice",]
}
8.1.2 测试程序
- 编写一个发布话题:XR806_to_ROS
发布的内容为“hello world!”,时间间隔为1s
- 编写一个接收话题:ROS_to_XR860
接收的内容通过串口显示出来
#include <ros.h>
#include <std_msgs/String.h>#include <stdio.h>
#include "ohos_init.h"
#include <stdlib.h>//信号量的声明
extern OS_Semaphore_t ros_sem;static OS_Thread_t g_main_thread;static ros::NodeHandle nh;
static std_msgs::String str_msg;
static ros::Publisher chatter("XR806_to_ROS", &str_msg);
static char hello_msg[25] = "hello world!";// 回调函数
static void message_callback(const std_msgs::String& msgs)
{printf("\r\nresive:%s\r\n", msgs.data);}static ros::Subscriber<std_msgs::String> sub("ROS_to_XR860", &message_callback);static void ROSThread(void *arg)
{ //等待信号量有效if (OS_SemaphoreWait(&ros_sem, OS_WAIT_FOREVER) == OS_OK){printf("\r\n--------- star ROS----------------\r\n");nh.initNode();nh.advertise(chatter);nh.subscribe(sub);while (1){if (nh.connected()){str_msg.data = hello_msg;chatter.publish(&str_msg); }nh.spinOnce();OS_MSleep(1000);} }
}
void ROSMain(void)
{printf("\r\nROSserial Start\r\n");if (OS_ThreadCreate(&g_main_thread, "ROSThread", ROSThread, NULL,OS_THREAD_PRIO_APP, 4 * 1024) != OS_OK) {printf("[ERR] Create MainThread Failed\n");}
}SYS_RUN(ROSMain);
8.1.3 编译程序
hb build -f
可能会遇到下面问题:
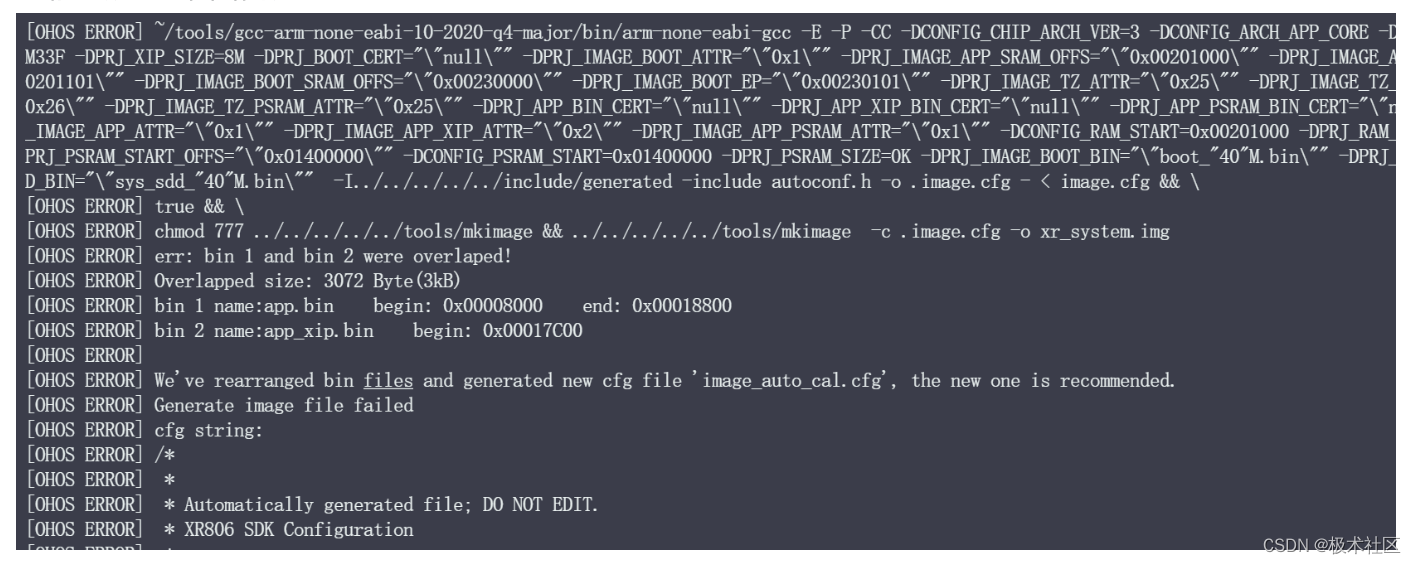
这个flash分配的分配有问题:
cd 到 device/xradio/xr806/xr_skylark/project/demo/audio_demo/image/xr806
用文件image_auto_cal.cfg中的内容覆盖image_wlan_ble.cfg中的内容。
8.2 PC ROS端
Ubuntu版本:20版(18版也可以使用)
8.2.1 创建ros空间
mkdir -p rosworkspace/src
cd rosworkspace
catkin_make
8.2.2 编写发布节点
import rospy
from std_msgs.msg import Stringif __name__ == "__main__":#2.初始化 ROS 节点:命名(唯一)rospy.init_node("talker_p")#3.实例化 发布者 对象pub = rospy.Publisher("ROS_to_XR860",String,queue_size=10)#4.组织被发布的数据,并编写逻辑发布数据msg = String() #创建 msg 对象msg_front = "hello XR806 "count = 0 #计数器 # 设置循环频率rate = rospy.Rate(1)while not rospy.is_shutdown():#拼接字符串msg.data = msg_front + str(count)pub.publish(msg)rate.sleep()#rospy.loginfo("写出的数据:%s",msg.data)count += 1
修改CMakeLists.txt
catkin_install_python(PROGRAMSscripts/test_pub.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
8.2.3 启动节点
- 启动主节点:
roscore
- 起动test_pub节点
source ./devel/setup.bashrosrun ros_test test_pub.py
- 启用serial_node节点:
串口:
rosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0 _baud:=115200
如果串口连接成功,终端显示:
INFO] [1640087588.757505]: ROS Serial Python Node
[INFO] [1640087588.762633]: Connecting to /dev/ttyUSB0 at 115200 baud
[INFO] [1640087591.079099]: Requesting topics...
[INFO] [1640087591.131236]: Note: publish buffer size is 512 bytes
[INFO] [1640087591.134777]: Setup publisher on XR806_to_ROS [std_msgs/String]
[INFO] [1640087591.142147]: Note: subscribe buffer size is 512 bytes
[INFO] [1640087591.144610]: Setup subscriber on ROS_to_XR860 [std_msgs/String]注意查看串口的权限,如果权限不足,先开启权限:
# 查看权限
ll /dev/ttyUSB*
#开启权限
sudo chmod 777 /dev/ttyUSB*
TCP
默认节点11411
rosrun rosserial_python serial_node.py tcp
如果TCP连接成功,终端显示:
[INFO] [1640232707.758952]: ROS Serial Python Node
[INFO] [1640232707.763597]: Fork_server is: False
[INFO] [1640232707.764688]: Waiting for socket connections on port 11411
[INFO] [1640232707.765650]: Waiting for socket connection
[INFO] [1640232724.857086]: Established a socket connection from 192.168.43.49 on port 60872
[INFO] [1640232724.859268]: calling startSerialClient
[INFO] [1640232726.966374]: Requesting topics...
[INFO] [1640232727.289246]: Note: publish buffer size is 512 bytes
[INFO] [1640232727.290573]: Setup publisher on XR806_to_ROS [std_msgs/String]
[INFO] [1640232727.295084]: Note: subscribe buffer size is 512 bytes
[INFO] [1640232727.296294]: Setup subscriber on ROS_to_XR860 [std_msgs/String]
8.3 结果查询
- ROS上查看话题:
rostopic list /ROS_to_XR860
/XR806_to_ROS
/diagnostics
/rosout
/rosout_agg
可见 /ROS_to_XR860和/XR806_to_ROS两个话题
- 查看/XR806_to_ROS
rostopic echo /ROS_to_XR860data: "hello world!"
---
data: "hello world!"
---
data: "hello world!"
---
data: "hello world!"
---
data: "hello world!"
---
- 查看XR806接收的 /ROS_to_XR860话题消息
串口连接
-------- star ROS----------------
resive:hello XR806 1
resive:hello XR806 2
resive:hello XR806 3
resive:hello XR806 4
resive:hello XR806 5
resive:hello XR806 6
resive:hello XR806 7
resive:hello XR806 8
resive:hello XR806 9
resive:hello XR806 10
resive:hello XR806 11
resive:hello XR806 12
TCP连接
--------- star ROS----------------
connect tcp_server successfuly!
resive:hello XR806 1
resive:hello XR806 2
resive:hello XR806 3
resive:hello XR806 4
resive:hello XR806 5
resive:hello XR806 6
resive:hello XR806 7
resive:hello XR806 8
相关文章:
【XR806开发板试用】+移植rosserial到XR806
1 XR806简介 板子来源于极术社区的试用,XR806的在线网址 其主要参数: 主控XR806AF2LDDRSIP 288KB SRAM存储SIP 160KB Code ROM. SIP 16Mbit Flash.天线板载WiFi/BT双天线,可共存按键reboot按键 1,功能按键 1灯红色电源指示灯 1…...

JSON协议详解、语法及应用
文章目录 一、什么是JSON二、JSON协议结构协议结构包括要素JSON语法规则JSON的协议结构示例 三、JSON的特点四、JSON常见应用场景 一、什么是JSON JSON(JavaScript Object Notation)是一种轻量级的数据交换格式,它以易于阅读和编写的文本格式…...

kubeasz部署k8s:v1.27.5集群
安装k8s集群相关系统及组件的详细版本号 Ubuntu 22.04.3 LTS k8s: v1.27.5 containerd: 1.6.23 etcd: v3.5.9 coredns: 1.11.1 calico: v3.24.6 安装步骤清单: 1.deploy机器做好对所有k8s node节点的免密登陆操作 2.deploy机器安装好python2版本以及pip,…...
RSA加密,解密,加签及验签
目录 1.说明 2.加密和加签的区别 3.后端加密,解密,加签及验签示例 4.前端加密,解密,加签及验签示例 5.前端加密,后端解密,前端加签,后端验签 6.注意事项 1.说明 RSA算法是一种非对称加密…...

【C++搜索】BFS:走迷宫
题目描述 一个迷宫由R行C列格子组成,有的格子里有障碍物,不能走;有的格子是空地,可以走。 给定一个迷宫,求从左上角走到右下角最少需要走多少步(数据保证一定能走到)。只能在水平方向或垂直方向走,不能斜着…...
SpringMVC 的参数绑定之list集合、Map
标签中name属性的值就是pojo类的属性名 参数绑定4 list [对象] <form action"teaupd.do" method"post"> <c:forEach items"${list}" var"tea" varStatus "status"> 教师编号:<input…...

Code Composer Studio (CCS) - Current and Local Revision
Code Composer Studio [CCS] - Current and Local Revision References 鼠标放在文件内的任意位置,鼠标右键 -> Compare With -> Local History -> Revision Time. References [1] Yongqiang Cheng, https://yongqiang.blog.csdn.net/...
Vue实现多个input输入,光标自动聚焦到下一个input
遇到一个需求,需要实现和移动端短信输入一样,输入内容后,光标会进入下一个输入框 需要用到2个事件 keydown事件发生在键盘的键被按下的时候 keyup 事件在按键被释放的时候触发 <template><div class"box"><el-fo…...
人工智能技术应用笔记(二):OpenAI SORA文生视频模型技术报告全文中英对照 (GPT4翻译+人工润色)
目录 Video generation models as world simulators(视频生成模型作为世界模拟器) Turning visual data into patches (将视觉数据转换为图像块) Video compression network (视频压缩网络) Spacetim…...
Linux-系统资源管理的命令
目录 查看CPU:more /proc/meminfo 查看内存数据:free -m / free -h 查看系统版本:more /etc/issue 查看操作系统的类型:uname -a 查看主机名称:hostname 查看磁盘空间:df -h 查看某个目录空间…...
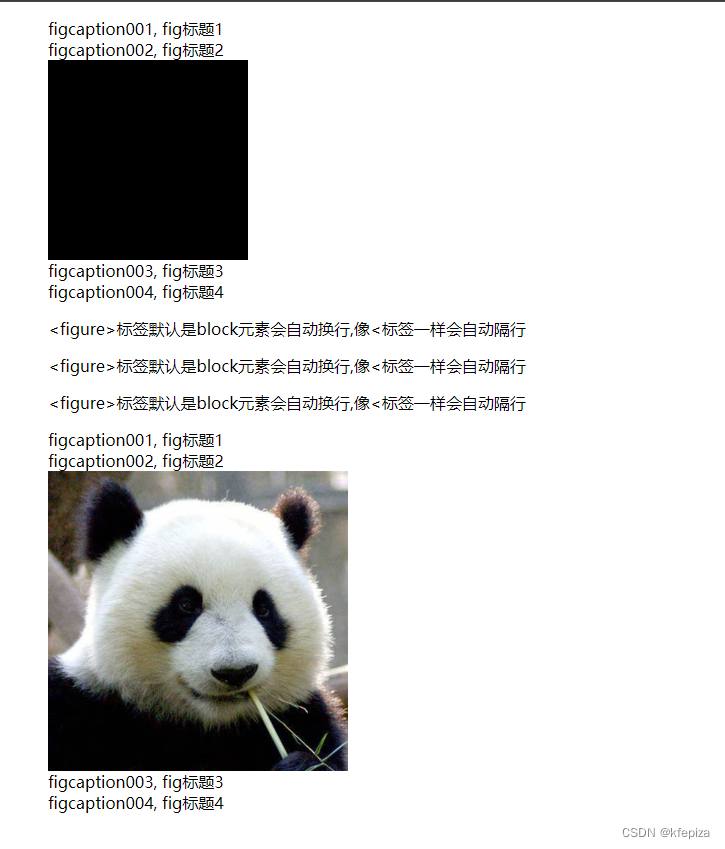
Html的<figure><figcaption>标签
Html的<figure><figcaption>标签 示例一: <figure><figcaption>figcaption001, fig标题1 </figcaption><figcaption>figcaption002, fig标题2 </figcaption><div style"width:calc(100px*2); height:calc(100px*2); back…...

Selenium实现多页面切换
当使用 Selenium 进行自动化测试或爬取数据时,有时需要处理多个页面之间的切换。以下是一些可能需要多页面切换的情况: 1、打开新窗口/页面: 在当前页面上点击链接、按钮或执行某些操作时,可能会打开一个新的窗口或页面。此时&a…...
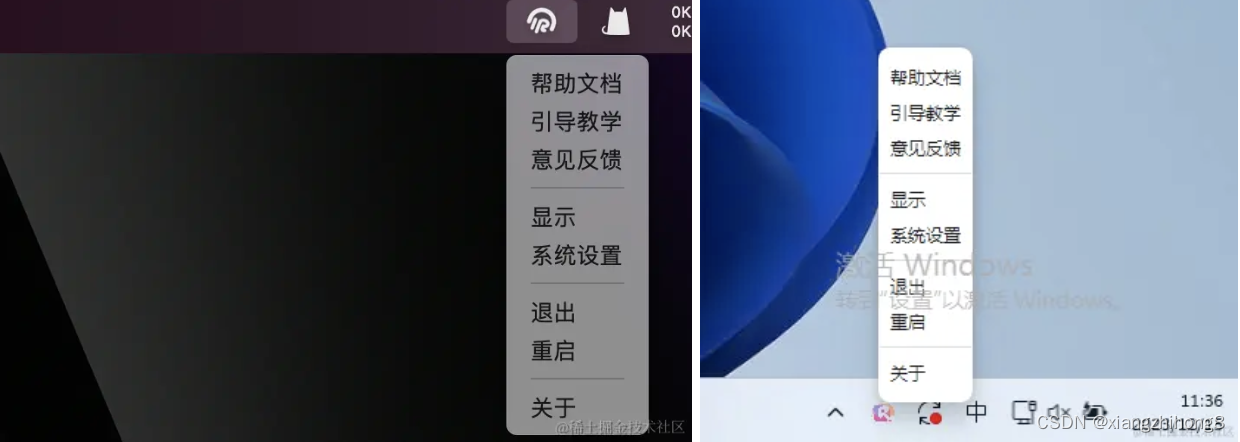
Electron实战之菜单与托盘
菜单、托盘是桌面端应用必备的功能之一,我们通常会在菜单上配置应用常用的:偏好设置、显示隐藏、打开文件等功能,在托盘内设置:退出、重启、帮助等辅助性功能,帮助用户方便快捷地控制应用的一些系统功能。系统托盘实际…...
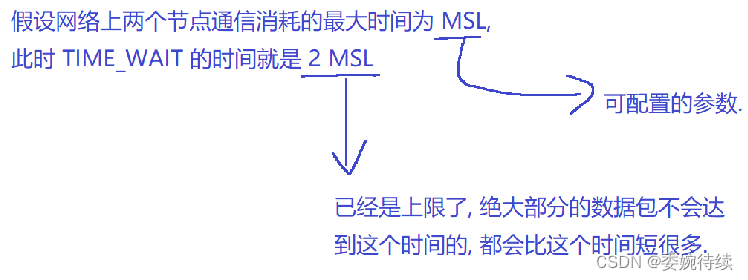
【Java EE初阶十六】网络原理(一)
在网络原理中主要学习TCP/IP四层模型中的重点网络协议 1. 应用层 1.1 应用程序与协议 应用层是和程序员接触最密切的; 应用程序:在应用层这里,很多时候都是程序员自定义应用层协议(步骤:1、根据需求,明确…...
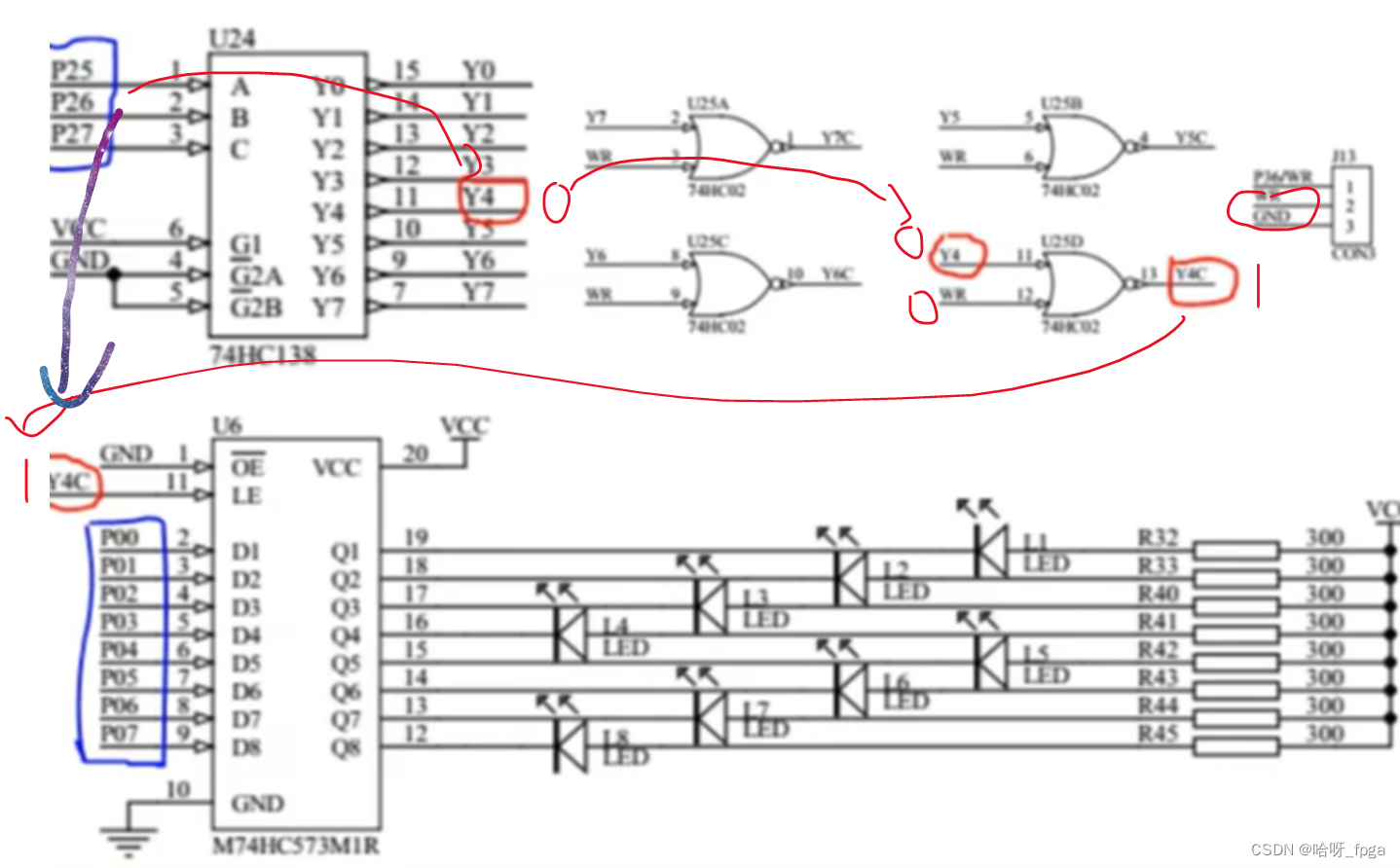
51_蓝桥杯_led流水灯
一 原理图分析 二 三八译码器工作原理 三八译码器:3个输入控制8路互斥的低电平有效输出。 C B A 输出 0 0 0 Y0 0 0 1 Y1 0 1 0 Y2 0 1 1 Y3 1 0 0 Y4 1 0 1 Y5 1 1 0 Y6 1 1 1 Y7 三 锁存器工作原理 锁存器:当使…...
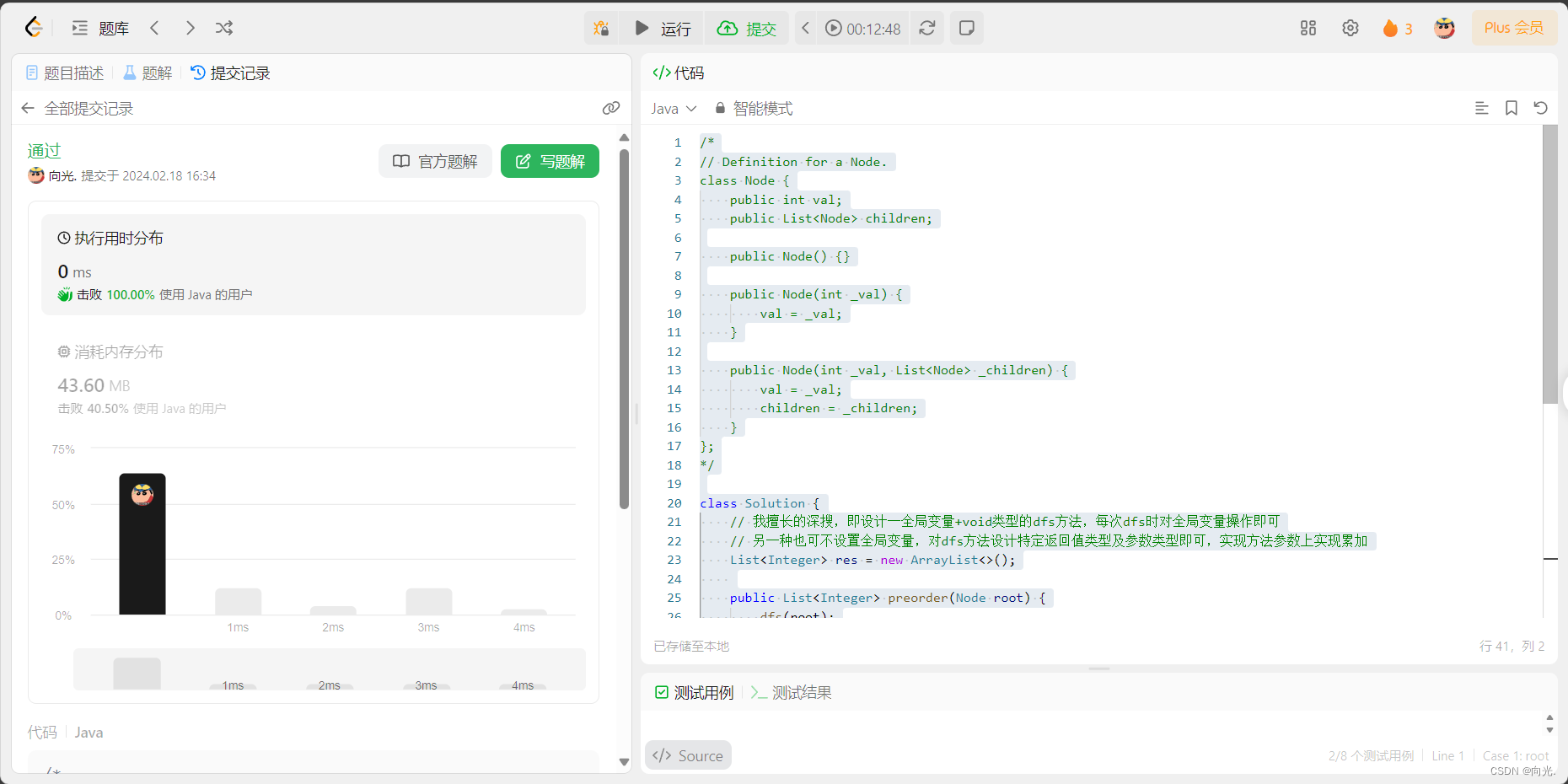
⭐北邮复试刷题589. N 叉树的前序遍历__DFS (力扣每日一题)
589. N 叉树的前序遍历 给定一个 n 叉树的根节点 root ,返回 其节点值的 前序遍历 。 n 叉树 在输入中按层序遍历进行序列化表示,每组子节点由空值 null 分隔(请参见示例)。 示例 1: 输入:root [1,null,…...

php伪协议之phar
一.phar协议 用于将多个 PHP 文件、类、库、资源(如图像、样式表)等打包成一个单独的文件。这个归档文件可以像其他 PHP 文件一样被包含(include)或执行。PHAR 归档提供了一种方便的方式来分发和安装 PHP 应用程序和库,…...

蓝桥杯电子类单片机提升三——NE555
目录 单片机资源数据包_2023 一、NE555和定时器工作模式 1.NE555的介绍 2.定时器的计数模式 二、NE555频率读取代码的实现 1.定时器0初始化 2.通过读取TH0和TL0来读取频率 3.通过中断读取频率 三、完整代码演示 通过读取TH0和TL0来读取频率 main.c 通过中断读取频…...

发掘GPT-4商业创新的潜力
GPT-4在商业创新方面的应用潜力巨大,它能够基于庞大的训练数据集和强大的语言生成能力,协助企业或个人用户在多个商业场景中推动创新: 市场分析与战略规划:GPT-4可以对历史数据、行业趋势、竞争对手信息进行深度分析,并…...

LeetCode42.接雨水(单调栈)
题目 给定 n 个非负整数表示每个宽度为 1 的柱子的高度图,计算按此排列的柱子,下雨之后能接多少雨水。 示例 : 输入:height [0,1,0,2,1,0,1,3,2,1,2,1] 输出:6 解释:上面是由数组 [0,1,0,2,1,0,1,3,2,…...

忘记压缩包密码怎么办?3个步骤帮你快速找回加密文件访问权限
忘记压缩包密码怎么办?3个步骤帮你快速找回加密文件访问权限 【免费下载链接】ArchivePasswordTestTool 利用7zip测试压缩包的功能 对加密压缩包进行自动化测试密码 项目地址: https://gitcode.com/gh_mirrors/ar/ArchivePasswordTestTool 你是否曾经面对一个…...

Hotkey Detective终极指南:3分钟定位Windows热键冲突的完整解决方案
Hotkey Detective终极指南:3分钟定位Windows热键冲突的完整解决方案 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective …...

硬件-软件协同设计:原理、优化与应用实践
1. 硬件-软件协同设计的本质与挑战现代科学仪器正变得越来越复杂,特别是在基础物理和相关领域。想象一下,你正在设计一台粒子探测器或天体物理观测站,这不仅仅是一堆硬件零件的简单组装,而是一个由传感器、电子设备、冷却系统、触…...

AI与HPC能耗测量与碳估算:从系统到代码的工程实践指南
1. 项目概述:为什么我们需要关注AI与HPC的能耗?如果你和我一样,常年泡在数据中心或者高性能计算集群里,最近几年肯定有一个感受越来越强烈:电费账单和机柜散发的热量,正以前所未有的速度成为项目规划和运维…...

5分钟掌握qmcdump:解锁QQ音乐加密音频的终极指南
5分钟掌握qmcdump:解锁QQ音乐加密音频的终极指南 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump 你是否曾经…...
)
Arduino入门教程十三|自制模拟传感器(分压原理详解+光敏夜灯+constrain范围限制)
我整理了一套Arduino 零基础 从入门到高级 完整系统课程,包含视频讲解、全套源码、接线图纸、库文件、ESP32/ESP32-S3 摄像头 & 物联网实战项目,循序渐进,新手也能零基础吃透。需要系统学习可以查看我主页专属课程(零基础保姆级Arduino教程从入门到实战_在线视频教程-C…...

Seurat分析避坑指南:从PBMC3K实战出发,详解`resolution`、`dims`参数怎么调,结果才靠谱
Seurat单细胞分析实战:如何科学调整resolution与dims参数获得理想分群第一次看到自己单细胞数据的UMAP图时,那种兴奋感至今难忘。但随之而来的困惑也同样深刻——为什么我的细胞分群看起来总是不太对?要么是密密麻麻挤在一起分不开࿰…...

算法公平性评估:如何用自洽性与方差分析区分真实偏见与随机噪声
1. 项目概述:为什么我们需要关注算法评估中的“噪声”?在算法公平性研究领域,我们常常看到这样的结论:“模型在A群体上的误报率(FPR)比B群体高X个百分点,因此存在不公平。” 然而,作…...

高斯混合期望传播算法:突破高阶MIMO检测性能瓶颈
1. 项目概述与核心挑战在无线通信系统的演进中,多输入多输出(MIMO)技术早已不是新鲜概念,它通过部署多根天线,在相同的频带内同时传输多个独立的数据流,从而成倍地提升了频谱效率和系统容量。然而ÿ…...

5大原神游戏痛点与BetterGI的智能解决方案
5大原神游戏痛点与BetterGI的智能解决方案 【免费下载链接】better-genshin-impact 📦BetterGI 更好的原神 - 自动拾取 | 自动剧情 | 全自动钓鱼(AI) | 全自动七圣召唤 | 自动伐木 | 自动刷本 | 自动采集/挖矿/锄地 | 一条龙 | 全连音游 | 自动烹饪 - UI Automatio…...