目标检测教程视频指南大全
魔鬼面具-哔哩哔哩视频指南
必看干货系列(建议搞深度学习的小伙伴都看看,特别是图像相关)
- 深度学习常见实验问题与实验技巧(适用于所有模型,小白初学者必看!)
- 还在迷茫深度学习中的改进实验应该从哪里开始改起的同学,一定要进来看看了!用自身经验给你推荐实验顺序!
- 探究深度学习中预训练权重对改进和精度的影响!
- 什么?你说你不会画模型结构图?行吧,那你进来看看吧,手把手教你画YAML结构图!
- 探究深度学习中训练中的可重现性
- 什么?你说你更换主干后看不懂配置文件也不懂画结构图?那你快点进来看看了!
- 从三个角度分析,什么条件才算是一个合格的改进专栏!
- 都2024了,你写论文不会还只用p,r,map这些指标分析目标检测模型吧?
YOLOV5,V7-PYQT5项目讲解
- 哔哩哔哩合集地址
- 项目github地址
YOLOV5、V7、V8 热力图源码
- 哔哩哔哩合集地址
- 项目github地址
YOLO系列模型使用教程系列
- YOLOV7保姆级教程
- YOLOV5-Seg实例分割教程
- YOLOV5-快速上手教程
- YOLOV8-OBB详细教学视频(包含如何把DOTA数据集分割成小图进行训练)
- EfficientTeacher半监督-详细教学和调参注意事项
YOLOV8源码常见疑问解答小课堂
- 关于配置文件中Optimizer参数为auto的时候,究竟Optimizer会怎么选用呢?
- best.pt究竟是根据什么指标来保存的?
- 数据增强在yolov8中的应用
- 如何添加FPS计算代码和FPS的相关的一些疑问
目标检测干活系列
- 深入了解目标检测中的检测头
环境配置系列教程
- 保姆式AUTODL-YOLO环境教程(上):从0教你如何配置VSCODE、安装新环境和CUDA和CUDNN、跑通YOLOV8、编译DCNV3
- 保姆式AUTODL-YOLO环境教程(下):从0教你如何配置VSCODE、安装新环境和CUDA和CUDNN、跑通YOLOV8、编译DCNV3
目标检测Tricks
- 可视化并统计目标检测中的TP,FP,FN
- 深度学习小实验-卷积家族(fps,flops,param)对比实验
- yolov5中的FeatureMap可视化(热力图格式)
- 用于yolov5和v7中的yolo格式转换coco格式的脚本.
- Segment Anything演示代码
- 固定随机种子在同一个主机上极可能地复现结果
- 计算yolov5推理时间和FPS的脚本
- 计算yolov7推理时间和FPS的脚本
YOLO系列(YOLOV5,YOLOV7,YOLOV8)模型改进大合集
YOLOV5(主干系列修改V7同样也适用)
- 添加EIOU,SIOU,ALPHA-IOU, FocalEIOU到yolov5的box_iou中
- Wise-IoU
- 使用DAMO-YOLO中的GFPN替换YOLOV5中的Head
- 使用DAMO-YOLO中的GFPN替换YOLOV5中的Head
- 使用yolov8中的C2F模块替换yolov5中的C3模块.
- 添加Optimal Transport Assignment到yolov5的Loss中
- 添加Deformable convolution V2到yolov5中
- 添加辅助训练分支到yolov5中
- 添加context augmentation module到yolov5中
- 添加SAC到yolov5中
- 添加CoordConv到yolov5中
- 添加soft-nms(IoU,GIoU,DIoU,CIoU,EIoU,SIoU)到yolov5中
- 添加DSConv到yolov5中
- 添加DCNV3到yolov5中.
- 添加Normalized Gaussian Wasserstein Distance到yolov5中.
- 添加Efficient-DecoupledHead到yolov5中
- 添加FasterNet中的Faster-Block到yolov5中
- 添加Timm支持的主干到yolov5中.
- 添加Task-Specific Context Decoupling到yolov5中
- 添加FasterNet主干到yolov5中
- 添加Omni-Dimensional Dynamic Convolution主干(od_mobilenetv2,od_resnet)到yolov5中
- 融合Omni-Dimensional Dynamic Convolution主干(od_mobilenetv2,od_resnet)中的Conv和BN
- 添加轻量级上采样算子CARAFE到yolov5中
- 添加CFPNet中的EVC-Block到yolov5中
- 添加基于注意力机制的目标检测头(DYHEAD)到yolov5中
- 添加(2023年New)InceptionNeXt主干到yolov5中
- 添加aLRPLoss到yolov5中
- 结合Res2Net提出具有多尺度提取能力的C3模块
- 添加(2022年)FocalNet(transformer)主干到yolov5中
- 添加(2023年)EMO(transformer)主干到yolov5中
- 添加(2022年)EfficientFormerV2(transformer)主干到yolov5中
- 添加(2022年CVPR)PoolFormer(transformer)主干到yolov5中
- 添加(2023年)EfficientViT(transformer)主干到yolov5中
- 添加ContextAggregation到yolov5中
- 添加(2023年)VanillaNet主干到yolov5中
- 添加(2022年)NextViT主干到yolov5中
- 添加(2023年)RIFormer主干到yolov5中
- Scale-Aware RFE与C3结合而成的C3RFEM添加到yolov5中
- 把重参数结构DiverseBranchBlock与C3融合成C3-DBB添加到yolov5中
- 添加(2023CVPR)EfficientViT(transformer)主干到yolov5中
- 添加(2023旋转目标检测SOTA)LSKNet主干到yolov5中
- 添加(2023最新IoU度量算法)MPDiou到yolov5中.
- 添加Yolo-Face-V2中SlideLoss的到yolov5中
- 添加RepViT(transformer)主干到yolov5中
- 利用华为2023最新GOLD-YOLO中的Gatherand-Distribute进行改进YOLOV5中的特征融合模
- 利用动态蛇形卷积改进YOLOV5
- 利用带有位置信息编码的AIFI自注意力机制改进YOLOV5
- 添加UniRepLKNet主干到yolov5中
- 添加Attentional Scale Sequence Fusion到yolov5中
- 添加cross-scale feature-fusion到yolov5中
- 添加对小目标有效的BiFormer注意力机制到yolov5中
YOLOV7
- 添加EIOU,SIOU,ALPHA-IOU, FocalEIOU到yolov5的box_iou中
- Wise-IoU
- 添加Deformable convolution V2到yolov7中
- 添加SAC到yolov7中
- 添加CoordConv到yolov7中
- 添加soft-nms(IoU,GIoU,DIoU,CIoU,EIoU,SIoU)到yolov7中
- 添加DSConv到yolov7中
- 添加DCNV3到yolov7中.
- 添加Normalized Gaussian Wasserstein Distance到yolov7中
- 添加具有隐式知识学习的Efficient-DecoupledHead到yolov7中
- 添加FasterNet中的PConv到yolov7中
- 添加轻量级上采样算子CARAFE到yolov7中.
- 添加基于注意力机制的目标检测头(DYHEAD)到yolov7中
- 添加Omni-Dimensional Dynamic Convolution到yolov7中
- 添加CFPNet中的EVC-Block到yolov7中
- P2,P6检测层在YOLOV7中的添加
- 使用VOVGSCSP轻量化yolov7的Neck
- 添加SwinTransformer-Tiny主干到yolov5中
- Scale-Aware RFE添加到yolov7中
- 把重参数结构DiverseBranchBlock添加到yolov7中
- 添加(2023最新IoU度量算法)MPDiou到yolov7中
- 利用华为2023最新GOLD-YOLO中的Gatherand-Distribute进行改进YOLOV7中的特征融合模块.
- 利用动态蛇形卷积改进YOLOV7
- 利用带有位置信息编码的AIFI自注意力机制改进YOLOV7
- 添加Attentional Scale Sequence Fusion到yolov7中
YOLOV8
- 添加EIOU,SIOU,ALPHA-IOU, FocalEIOU到yolov5,yolov8的box_iou中
- Wise-IoU
- 添加Deformable convolution V2到yolov8中
- 最新~YOLOV8手把手教学配置文件添加注意力机制!一看就会!
- YOLOV8改进-手把手带你学会注意力机制进阶用法
- YOLOV8可视化-可视化并统计每张图的True Positive、False Positive、False Negative
- YOLOV8-基于VisDrone的TaskAlignedAssigner任务对齐分配策略的调参实验
- YOLOV8-不会把多个改进整合到一个yaml配置文件里面?那来看看这个吧!从简到难手把手带你整合三个yaml
相关文章:

目标检测教程视频指南大全
魔鬼面具-哔哩哔哩视频指南 必看干货系列(建议搞深度学习的小伙伴都看看,特别是图像相关) 深度学习常见实验问题与实验技巧(适用于所有模型,小白初学者必看!)还在迷茫深度学习中的改进实验应该从哪里开始改起的同学,一定要进来看看了!用自身…...

【Linux取经路】文件系统之重定向的实现原理
文章目录 一、再来理解重定向1.1 输出重定向效果演示1.2 重定向的原理1.3 dup21.4 输入重定向效果演示1.5 输入重定向代码实现 二、再来理解标准输出和标准错误2.1 同时对标准输出和标准错误进行重定向2.2 将标准输出和标准错误重定向到同一个文件 三、再看一切皆文件四、结语 …...

JAVA设计模式结构型模式
一、前言 java设计模式主要分为创建型模式,结构型模式和行为型模式。上一篇主要总结了行为型设计模式,本章总结,结构型模式。像创建型模式就不写了,比较简单。大概知道是工厂模式和建造者模式,原型模式就行࿰…...
第4讲引入JWT前后端交互
引入JWT前后端交互 Json web token (JWT), 是为了在网络应用环境间传递声明而执行的一种基于JSON的开放标准((RFC 7519); JWT就是一段字符串,用来进行用户身份认证的凭证,该字符串分成三段【头部、载荷、签证】 后端接口测试&…...

基于Java的车辆租赁管理平台/租车系统
功能介绍 平台采用B/S结构,后端采用主流的Springboot框架进行开发,前端采用主流的Vue.js进行开发。 整个平台包括前台和后台两个部分。 前台功能包括:首页、车辆详情、车辆预订、用户中心模块。后台功能包括:车辆管理、分类管理…...

如何升级至ChatGPT Plus:快速指南,ChatGPT的秘密武器GPT4.0是什么?
提到 ChatGPT。想必大家都有所耳闻。自从 2022 年上线以来,就受到国内外狂热的追捧和青睐,上线2个月,月活突破1个亿!!! 而且还在持续上涨中。因为有很多人都在使用 ChatGPT 。无论是各大头条、抖音等 App、…...
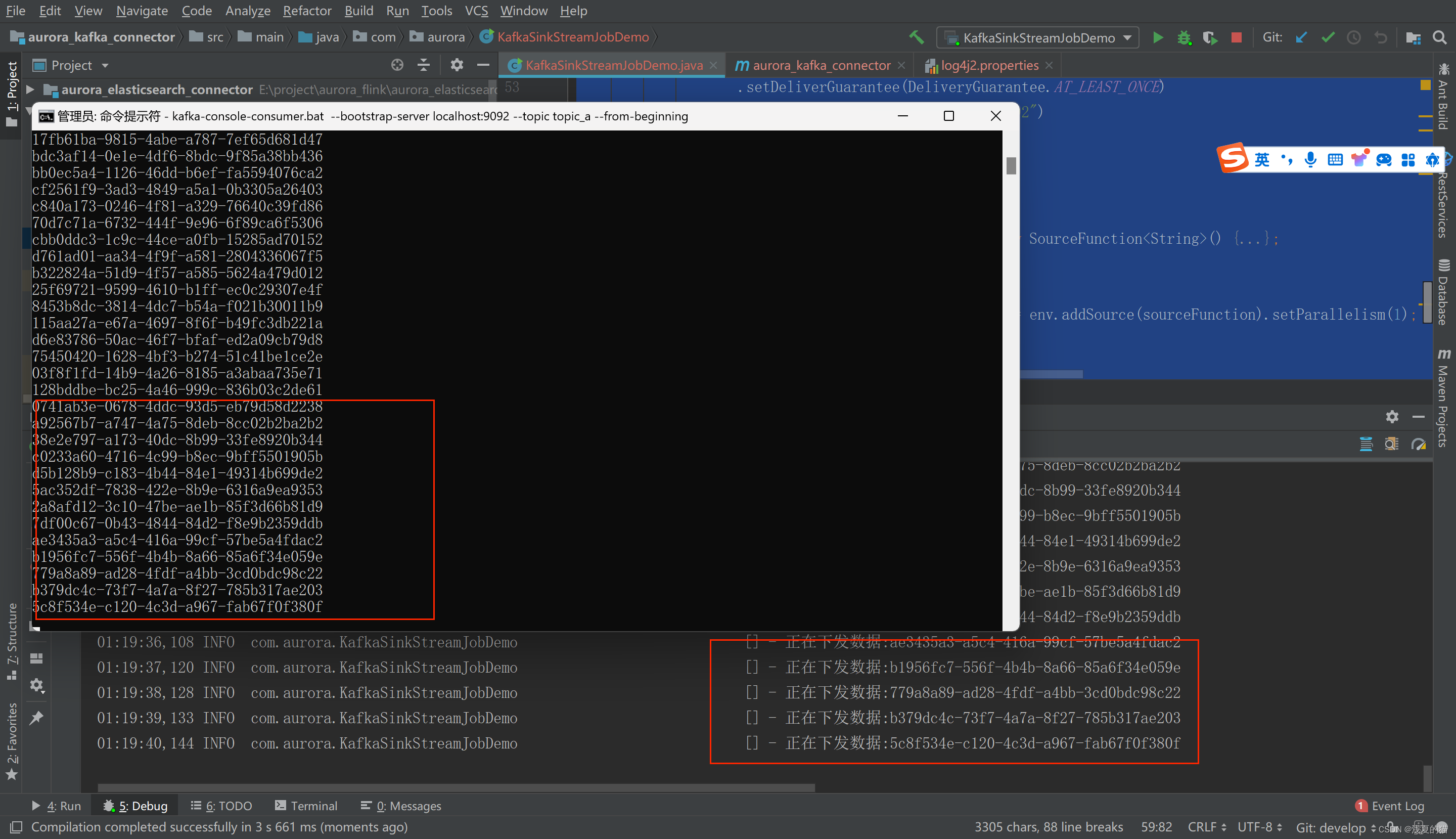
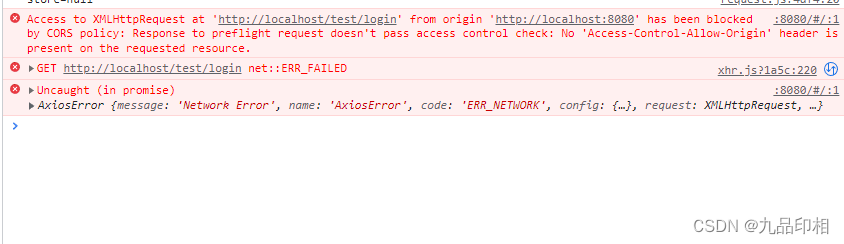
【天衍系列 05】Flink集成KafkaSink组件:实现流式数据的可靠传输 高效协同
文章目录 01 KafkaSink 版本&导言02 KafkaSink 基本概念03 KafkaSink 工作原理1.初始化连接2.定义序列化模式3.创建KafkaSink算子4.创建数据源5.将数据流添加到KafkaSink6.内部工作机制 04 KafkaSink参数配置05 KafkaSink 应用依赖06 KafkaSink 快速入门6.1 包结构6.2 项目…...
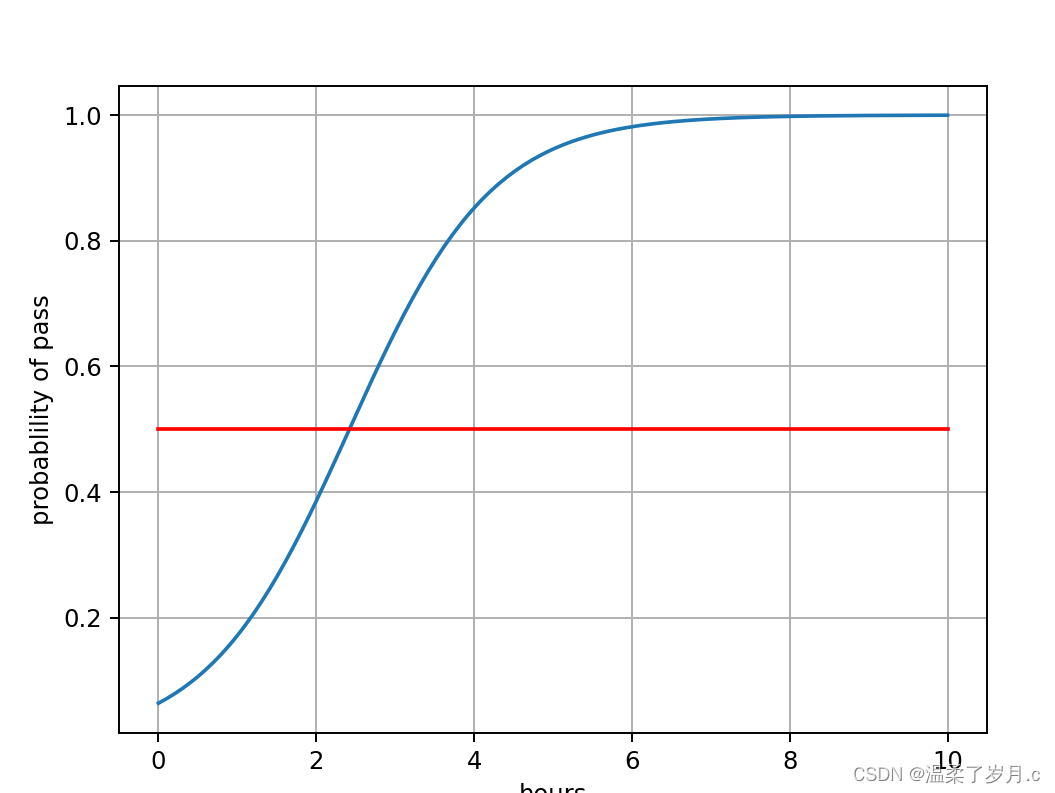
深度学习之pytorch实现逻辑斯蒂回归
深度学习之pytorch实现逻辑斯蒂回归 解决的问题数学公式logiatic函数损失值 代码与线性回归代码的区别数据损失值构造回归的函数 结果分析 解决的问题 logistic 适用于分类问题,这里案例( y为0和1 ,0和 1 分别代表一类) 于解决二分类…...

有事休假店铺无人看守怎么办?智能远程视频监控系统保卫店铺安全
在春节期间,很多自营店主也得到了久违的假期,虽然很多店主都是长期在店铺中看守,但遇到春节这样的日子,多数人还是选择回乡休假。面对店主休假或有事不能管理店铺时,传统的监控虽然可以做到单一的监控,却仍…...

酷开科技 | 酷开系统壁纸模式,让过年更有氛围感!
在阵阵爆竹声中,家家户户都沉浸在浓浓的年味中。过年,是团圆,是温暖。团团圆圆的日子里,仪式感不可少,换上一张喜气洋洋的电视壁纸吧,寓意幸福一年又一年。打开酷开系统壁纸模式挑选一张年味十足的壁纸&…...

Docker中部署flink集群的两种方式
文章目录 一、概述二、准备工作三、方式一四、方式二1、准备配置文件2、执行 docker 命令 一、概述 本文将通过 2 种方式在 docker 中部署 flink standalone 集群,集群中共有 4 个节点,分别是 1 个 jobManager 节点和 3 个 taskManager 节点。方式一能快…...
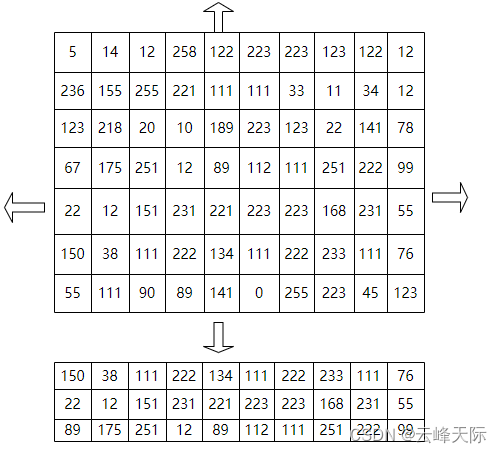
八、计算机视觉-边界填充
文章目录 前言一、原理二、具体的实现 前言 在Python中使用OpenCV进行边界填充(也称为zero padding)是一种常见的图像处理操作,通常用于在图像周围添加额外的像素以便进行卷积或其他操作。下面是使用OpenCV进行边界填充的基本原理和方法 一…...

ffmpeg 硬件加速介绍
基于OS的硬件加速 Windows 参考[2],基于windows的硬件加速都是基于DirectX API,我们可以用ffmpeg -hwaccels查看当前环境支持的硬件加速接口,如下为windows上的执行ffmpeg --hwaccels的结果。 在linux上执行ffmpeg -hwaccels的结果如下: 可以看到windows上支持的硬件加速…...
)
【QT+QGIS跨平台编译】之三十九:【Exiv2+Qt跨平台编译】(一套代码、一套框架,跨平台编译)
文章目录 一、Exiv2介绍二、文件下载三、文件分析四、pro文件4.1 exiv2-xmp4.2 exiv2lib_int4.3 exiv2lib五、编译实践一、Exiv2介绍 Exiv2是一个开源的C++库,用于读取、编辑和写入图片和视频文件的元数据。它可以处理各种类型的元数据,包括EXIF、IPTC、XMP等。 元数据是与…...

术业有专攻!三防加固平板助力工业起飞
在日常使用中的商业电脑比较追求时效性,以市场定位做标准,内部元件只需满足一般要求就行,使用寿命比较短。而三防平板电脑是主要运用在复杂、恶劣的环境下所以在需求方面较高,需要保证产品在恶劣条件下正常使用,满足行业领域的需求…...

适合tiktok运营的云手机需要满足什么条件?
TikTok作为一款全球热门的社交媒体平台,具有无限的市场潜力。然而,卖家在运营过程中常常会面临到视频0播、账号被降权、限流等问题,甚至可能因为多人同时使用一个IP而导致封号的风险。为了规避这些问题,越来越多的卖家将目光投向了…...
微服务-微服务Nacos配置中心
1.1 配置中心架构 1.2 Config Client源码分析 配置中心核心接口ConfigService public class ConfigServerDemo {public static void main(String[] args) throws NacosException, InterruptedException {String serverAddr "localhost";String dataId "naco…...
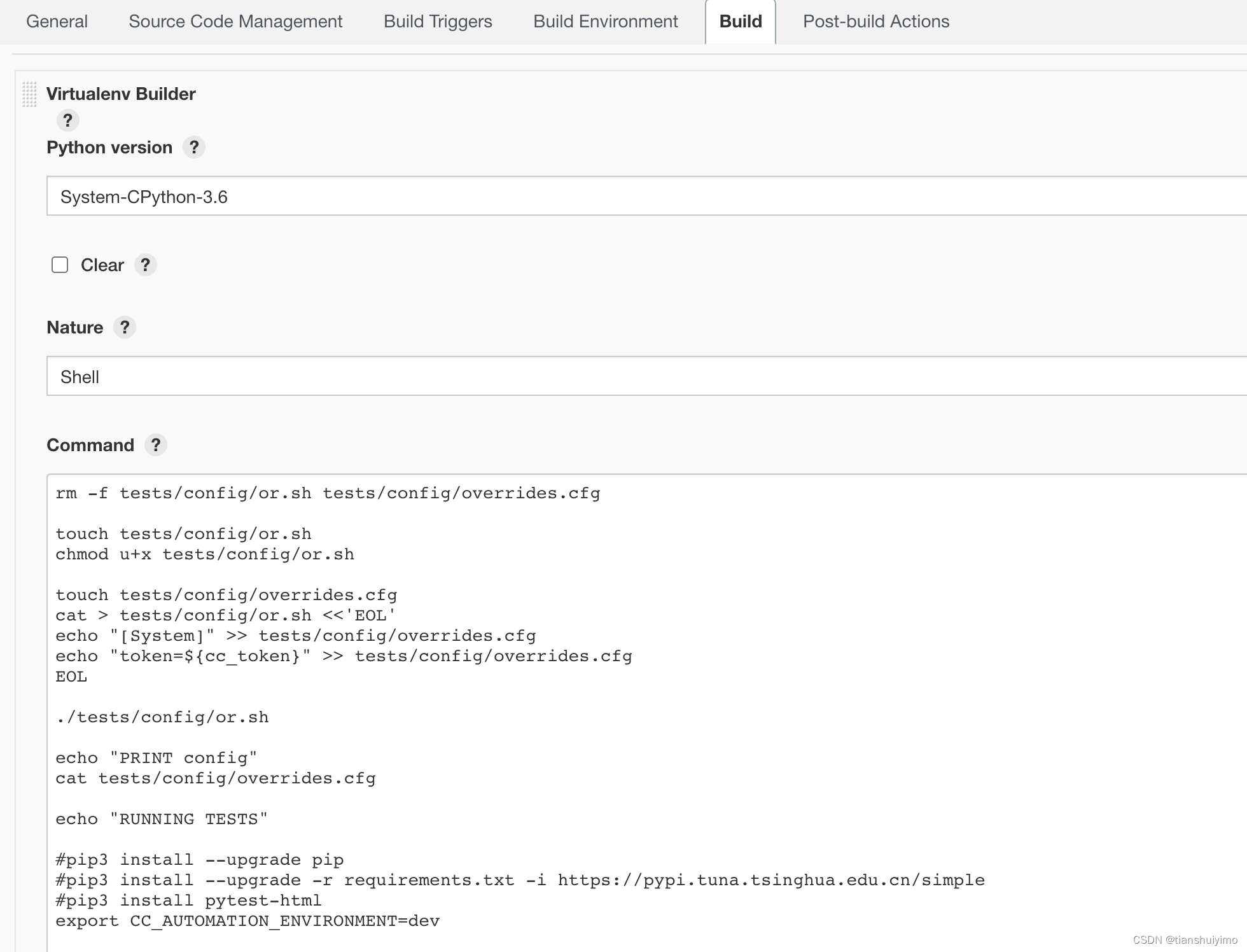
配置Python环境及job运行的虚拟环境
1、配置Jenkins的Python环境:Manage Jnekins-Global Tool Configuration-Python 2、安装pyenv插件 此插件会给每个job都创建一个虚拟Python环境 安装后,在job config-build中选择 virtualenv builder build job的时候会自动在/opt/jenkins(node主机的…...

【Java】图解 JVM 垃圾回收(二):垃圾收集器、Full GC
图解 JVM 垃圾回收(二) 1.垃圾收集器1.1 内存分配与回收策略1.2 Serial 收集器1.3 Parallel Scavenge 收集器1.4 ParNew 收集器1.5 CMS 收集器1.6 G1 收集器 2.Full GC 的触发条件 1.垃圾收集器 Java 虚拟机提供了多种垃圾回收器,每种回收器…...
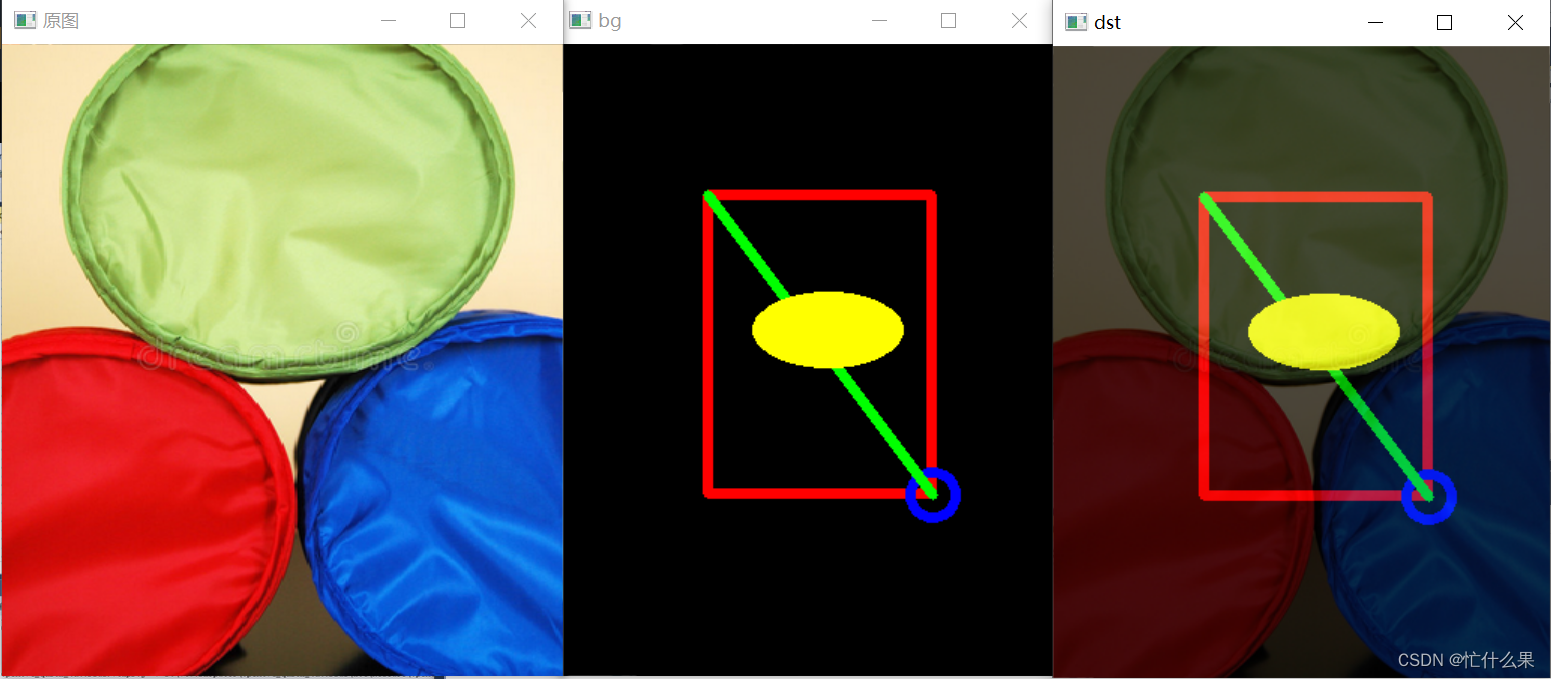
Opencv绘图之rectangle、circle、line、ellipse、Rect、RotatedRect、Point
OpenCV中提供了多种函数来在图像上绘制各种基本形状,如矩形、圆形、线条、椭圆等。同时,Rect和RotatedRect是用来表示矩形区域的类,它们在图像处理中非常有用,尤其是在需要定义和操作图像区域时。Point类用于表示二维空间中的一个…...

2026年必看:Trae对比Claude Code详细评测,热门AI编程工具横评
2026年必看:Trae对比Claude Code详细评测,热门AI编程工具横评 AI编程工具已从辅助插件演进为全流程开发核心引擎,2026年各类产品迭代加速,既有贴合本土开发者的创新工具,也有海外深耕多年的成熟产品。本次聚焦Trae&am…...

终极指南:如何用calendar.js轻松实现农历公历智能转换
终极指南:如何用calendar.js轻松实现农历公历智能转换 【免费下载链接】calendar.js 中国农历(阴阳历)和西元阳历即公历互转JavaScript库 项目地址: https://gitcode.com/gh_mirrors/ca/calendar.js 想要在你的Web应用中添加中国传统文…...

跨平台Unity游戏资源编辑利器:UABEA深度解析
跨平台Unity游戏资源编辑利器:UABEA深度解析 【免费下载链接】UABEA c# uabe for newer versions of unity 项目地址: https://gitcode.com/gh_mirrors/ua/UABEA 在游戏开发与模组制作领域,Unity引擎的资源文件编辑一直是个技术门槛较高的任务。传…...

新一代高性能SAR舰船智能检测数据集SSDD:从集中到分散的渐进式检测范式革新
新一代高性能SAR舰船智能检测数据集SSDD:从集中到分散的渐进式检测范式革新 【免费下载链接】Official-SSDD SAR Ship Detection Dataset (SSDD): Official Release and Comprehensive Data Analysis 项目地址: https://gitcode.com/gh_mirrors/of/Official-SSDD …...

REXROTH VT3006S35R1比例控制卡
REXROTH VT3006S35R1 是博世力士乐生产的一款模拟放大器卡(比例控制卡),专门用于控制先导式比例方向阀和比例压力阀,是液压比例控制系统中的核心控制组件。产品定位:模拟放大器卡,用于驱动和控制工业液压比…...

AFM虚拟实验避坑指南:PID参数怎么调?相位图为何比形貌图更“敏感”?
AFM虚拟实验避坑指南:PID参数调节与相位图敏感性的深度解析 1. 从零开始理解AFM虚拟实验的核心逻辑 原子力显微镜(AFM)虚拟实验作为现代材料表征技术的重要教学工具,其核心价值在于让学习者无需接触昂贵设备就能掌握微观世界探测…...

CTF 竞赛干货|50 个实战解题思路,收藏一篇就够用
CTF选手必藏的50个实战解题思路!一篇够用! CTF竞赛的核心逻辑 • 核心目标:快速拆解问题(Flag导向)、工具链协作、模式化思维。• 关键原则:先广度后深度(优先收集信息)、分治策略&…...

再见,Markdown!你好,HTML!
往期热门文章:1、Claude Code 对比 Codex,贵 10 倍与快 4 倍2、Java5大AI框架!3、Nginx 惊现 RCE 漏洞,影响全球 1/3 网站4、IDEA 里跑 Claude Code 和 Codex 的最佳搭子,3.3k Star 开源免费太爽了!5、烂尾…...

如何5分钟掌握SD-PPP:Photoshop AI插件完整入门指南
如何5分钟掌握SD-PPP:Photoshop AI插件完整入门指南 【免费下载链接】sd-ppp A Photoshop AI plugin 项目地址: https://gitcode.com/gh_mirrors/sd/sd-ppp SD-PPP是一款革命性的Photoshop AI插件,它将强大的AI绘图能力无缝集成到Adobe Photoshop…...
)
软件架构设计师考试——系统安全性与保密性设计知识点全总结(考前冲刺版,超1万字)
临近软件架构设计师考试,系统安全性与保密性设计是考试的核心模块,贯穿上午场信息系统综合知识(15-20分)、下午场案例分析(25-35分)及论文写作(高频命题方向),是“稳拿分…...