实践航拍小目标检测,基于YOLOv5全系列【n/s/m/l/x】参数模型开发构建无人机航拍场景下的小目标检测识别分析系统
关于无人机相关的场景在我们之前的博文也有一些比较早期的实践,感兴趣的话可以自行移步阅读即可:
《deepLabV3Plus实现无人机航拍目标分割识别系统》
《基于目标检测的无人机航拍场景下小目标检测实践》
《助力环保河道水质监测,基于yolov5全系列模型【n/s/m/l/x】开发构建不同参数量级的无人机航拍河道污染漂浮物船只目标检测识别系统,集成GradCAM对模型检测识别能力进行分析》
《基于YOLO开发构建红外场景下无人机航拍车辆实例分割检测识别分析系统》
《基于轻量级YOLO模型开发构建大疆无人机检测系统》
《基于轻量级YOLOv5n/s/m三款模型开发构建基于无人机视角的高空红外目标检测识别分析系统,对比测试分析性能》
《基于目标检测实现遥感场景下的车辆检测计数》
《共建共创共享》
助力森林火情烟雾检测预警,基于YOLOv5全系列模型[n/s/m/l/x]开发构建无人机航拍场景下的森林火情检测识别系统》
《UAV 无人机检测实践分析》
《助力森林火情预警检测,基于YOLOv7-tiny、YOLOv7和YOLOv7x开发构建无人机航拍场景下的森林火情检测是别预警系统》
《无人机助力电力设备螺母缺销智能检测识别,python基于YOLOv5开发构建电力设备螺母缺销小目标检测识别系统》
《无人机助力电力设备螺母缺销智能检测识别,python基于YOLOv7开发构建电力设备螺母缺销小目标检测识别系统》
前面因为时间、资源等因素的限制我们没有办法对YOLOv8全系列不同参数的模型进行全面的对比分析,仅仅开发了最为轻量级的n系列的模型,感兴趣的话可以自行移步阅读即可:
《实践航拍小目标检测,基于轻量级YOLOv8n开发构建无人机航拍场景下的小目标检测识别分析系统》
后续我们开发了YOLOv8全系列的参数模型,如下:
《实践航拍小目标检测,基于YOLOv8全系列【n/s/m/l/x】参数模型开发构建无人机航拍场景下的小目标检测识别分析系统》
之后基于YOLOv7系列最为轻量级的tiny系列的模型开发构建了对应的检测模型如下:
《实践航拍小目标检测,基于轻量级YOLOv7tiny开发构建无人机航拍场景下的小目标检测识别分析系统》
首先看下实例效果:
本文是选择的是YOLOv5算法模型来完成本文项目的开发构建。相较于前两代的算法模型,YOLOv5可谓是集大成者,达到了SOTA的水平,下面简单对v3-v5系列模型的演变进行简单介绍总结方便对比分析学习:
【YOLOv3】
YOLOv3(You Only Look Once version 3)是一种基于深度学习的快速目标检测算法,由Joseph Redmon等人于2018年提出。它的核心技术原理和亮点如下:
技术原理:
YOLOv3采用单个神经网络模型来完成目标检测任务。与传统的目标检测方法不同,YOLOv3将目标检测问题转化为一个回归问题,通过卷积神经网络输出图像中存在的目标的边界框坐标和类别概率。
YOLOv3使用Darknet-53作为骨干网络,用来提取图像特征。检测头(detection head)负责将提取的特征映射到目标边界框和类别预测。
亮点:
YOLOv3在保持较高的检测精度的同时,能够实现非常快的检测速度。相较于一些基于候选区域的目标检测算法(如Faster R-CNN、SSD等),YOLOv3具有更高的实时性能。
YOLOv3对小目标和密集目标的检测效果较好,同时在大目标的检测精度上也有不错的表现。
YOLOv3具有较好的通用性和适应性,适用于各种目标检测任务,包括车辆检测、行人检测等。
【YOLOv4】
YOLOv4是一种实时目标检测模型,它在速度和准确度上都有显著的提高。相比于其前一代模型YOLOv3,YOLOv4在保持较高的检测精度的同时,还提高了检测速度。这主要得益于其采用的CSPDarknet53网络结构,主要有三个方面的优点:增强CNN的学习能力,使得在轻量化的同时保持准确性;降低计算瓶颈;降低内存成本。YOLOv4的目标检测策略采用的是“分而治之”的策略,将一张图片平均分成7×7个网格,每个网格分别负责预测中心点落在该网格内的目标。这种方法不需要额外再设计一个区域提议网络(RPN),从而减少了训练的负担。然而,尽管YOLOv4在许多方面都表现出色,但它仍然存在一些不足。例如,小目标检测效果较差。此外,当需要在资源受限的设备上部署像YOLOv4这样的大模型时,模型压缩是研究人员重新调整较大模型所需资源消耗的有用工具。
优点:
速度:YOLOv4 保持了 YOLO 算法一贯的实时性,能够在检测速度和精度之间实现良好的平衡。
精度:YOLOv4 采用了 CSPDarknet 和 PANet 两种先进的技术,提高了检测精度,特别是在检测小型物体方面有显著提升。
通用性:YOLOv4 适用于多种任务,如行人检测、车辆检测、人脸检测等,具有较高的通用性。
模块化设计:YOLOv4 中的组件可以方便地更换和扩展,便于进一步优化和适应不同场景。
缺点:
内存占用:YOLOv4 模型参数较多,因此需要较大的内存来存储和运行模型,这对于部分硬件设备来说可能是一个限制因素。
训练成本:YOLOv4 模型需要大量的训练数据和计算资源才能达到理想的性能,这可能导致训练成本较高。
精确度与速度的权衡:虽然 YOLOv4 在速度和精度之间取得了较好的平衡,但在极端情况下,例如检测高速移动的物体或复杂背景下的物体时,性能可能会受到影响。
误检和漏检:由于 YOLOv4 采用单一网络对整个图像进行预测,可能会导致一些误检和漏检现象。
【YOLOv5】
YOLOv5是一种快速、准确的目标检测模型,由Glen Darby于2020年提出。相较于前两代模型,YOLOv5集成了众多的tricks达到了性能的SOTA:
技术原理:
YOLOv5同样采用单个神经网络模型来完成目标检测任务,但采用了新的神经网络架构,融合了领先的轻量级模型设计理念。YOLOv5使用较小的骨干网络和新的检测头设计,以实现更快的推断速度,并在不降低精度的前提下提高目标检测的准确性。
亮点:
YOLOv5在模型结构上进行了改进,引入了更先进的轻量级网络架构,因此在速度和精度上都有所提升。
YOLOv5支持更灵活的模型大小和预训练选项,可以根据任务需求选择不同大小的模型,同时提供丰富的数据增强扩展、模型集成等方法来提高检测精度。YOLOv5通过使用更简洁的代码实现,提高了模型的易用性和可扩展性。
简单看下实例数据情况:
训练数据配置文件如下:
# Dataset
path: ./dataset
train:- images/train
val:- images/test
test:- images/test# Classes
names:0: pedestrian1: people2: bicycle3: car4: van5: truck6: tricycle7: awning-tricycle8: bus9: motor
实验截止目前,本文将YOLOv5系列五款不同参数量级的模型均进行了开发评测,接下来看下模型详情:
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv5 object detection model with P3-P5 outputs. For details see https://docs.ultralytics.com/models/yolov5# Parameters
nc: 10 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov5n.yaml' will call yolov5.yaml with scale 'n'# [depth, width, max_channels]n: [0.33, 0.25, 1024]s: [0.33, 0.50, 1024]m: [0.67, 0.75, 1024]l: [1.00, 1.00, 1024]x: [1.33, 1.25, 1024]# YOLOv5 v6.0 backbone
backbone:# [from, number, module, args][[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2[-1, 1, Conv, [128, 3, 2]], # 1-P2/4[-1, 3, C3, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8[-1, 6, C3, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16[-1, 9, C3, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32[-1, 3, C3, [1024]],[-1, 1, SPPF, [1024, 5]], # 9]# YOLOv5 v6.0 head
head:[[-1, 1, Conv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, C3, [512, False]], # 13[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, C3, [256, False]], # 17 (P3/8-small)[-1, 1, Conv, [256, 3, 2]],[[-1, 14], 1, Concat, [1]], # cat head P4[-1, 3, C3, [512, False]], # 20 (P4/16-medium)[-1, 1, Conv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5[-1, 3, C3, [1024, False]], # 23 (P5/32-large)[[17, 20, 23], 1, Detect, [nc]], # Detect(P3, P4, P5)]在实验训练开发阶段,所有的模型均保持完全相同的参数设置,等待训练完成后,来整体进行评测对比分析。
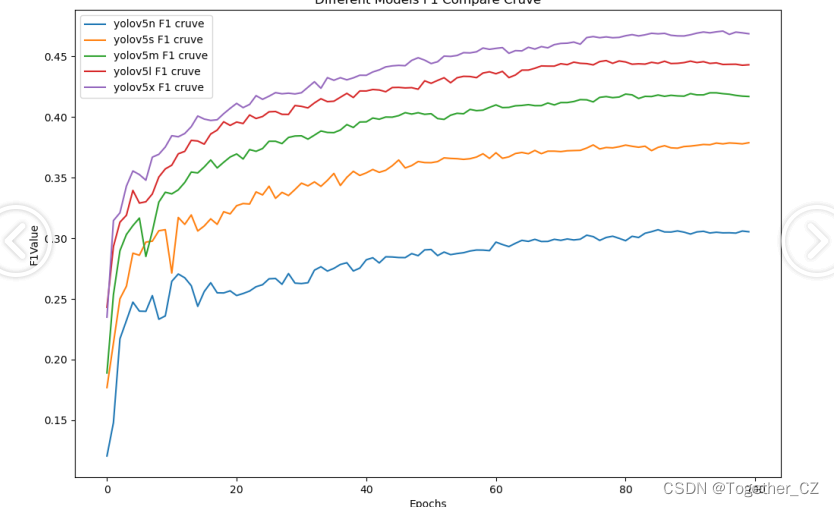
【F1值曲线】
F1值曲线是一种用于评估二分类模型在不同阈值下的性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)、召回率(Recall)和F1分数的关系图来帮助我们理解模型的整体性能.F1分数是精确率和召回率的调和平均值,它综合考虑了两者的性能指标。F1值曲线可以帮助我们确定在不同精确率和召回率之间找到一个平衡点,以选择最佳的阈值。
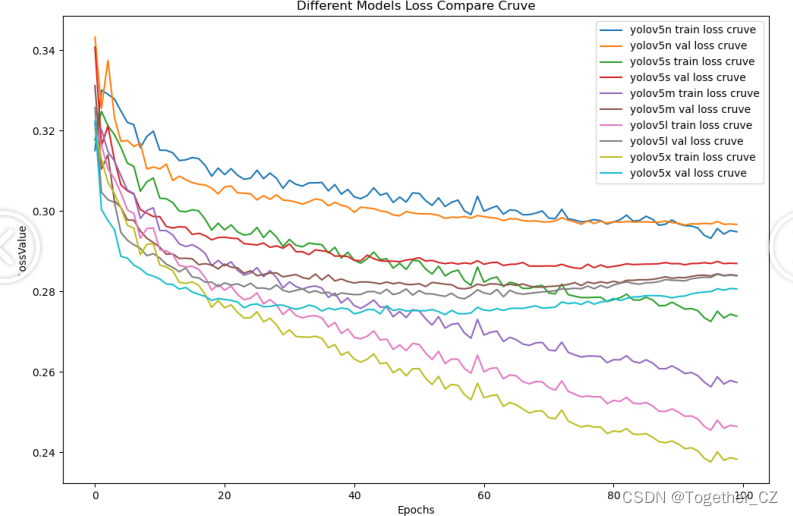
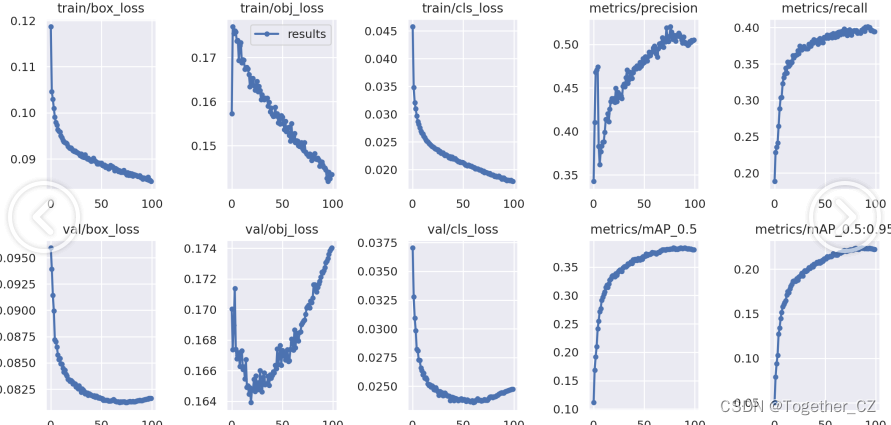
【loss曲线】
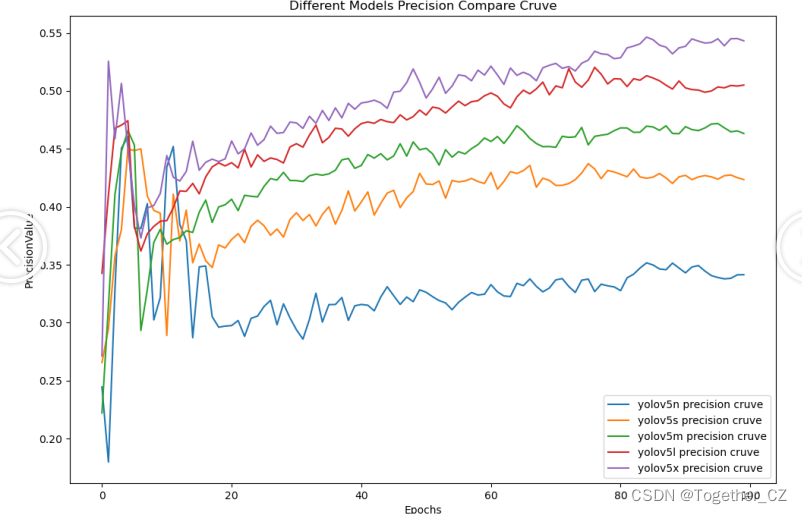
【Precision曲线】
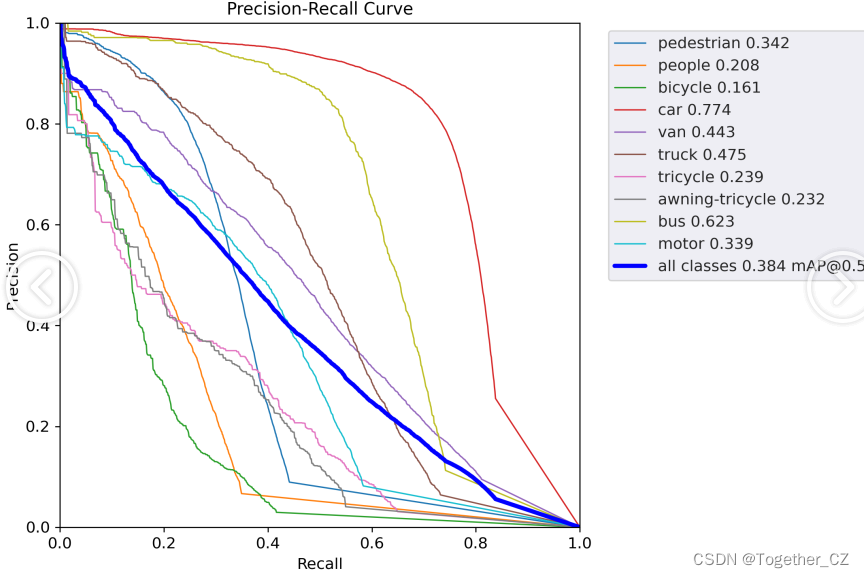
精确率曲线(Precision-Recall Curve)是一种用于评估二分类模型在不同阈值下的精确率性能的可视化工具。它通过绘制不同阈值下的精确率和召回率之间的关系图来帮助我们了解模型在不同阈值下的表现。精确率(Precision)是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。
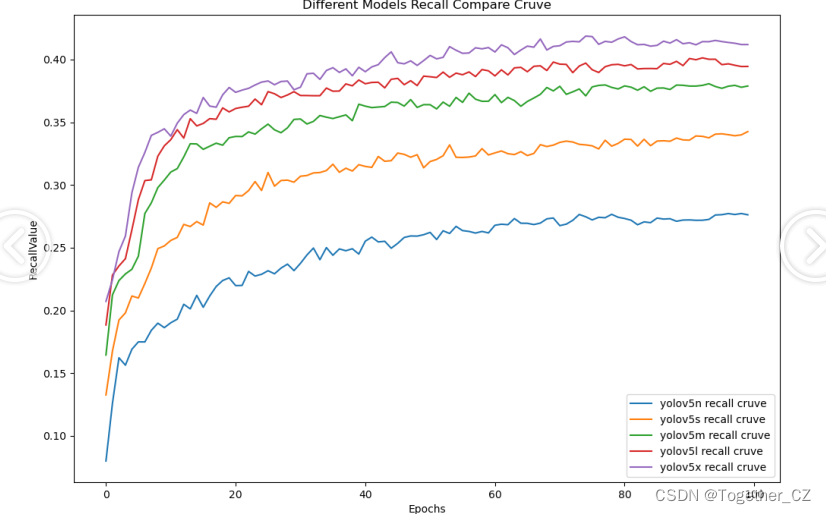
【Recall曲线】
召回率曲线(Recall Curve)是一种用于评估二分类模型在不同阈值下的召回率性能的可视化工具。它通过绘制不同阈值下的召回率和对应的精确率之间的关系图来帮助我们了解模型在不同阈值下的表现。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。召回率也被称为灵敏度(Sensitivity)或真正例率(True Positive Rate)。
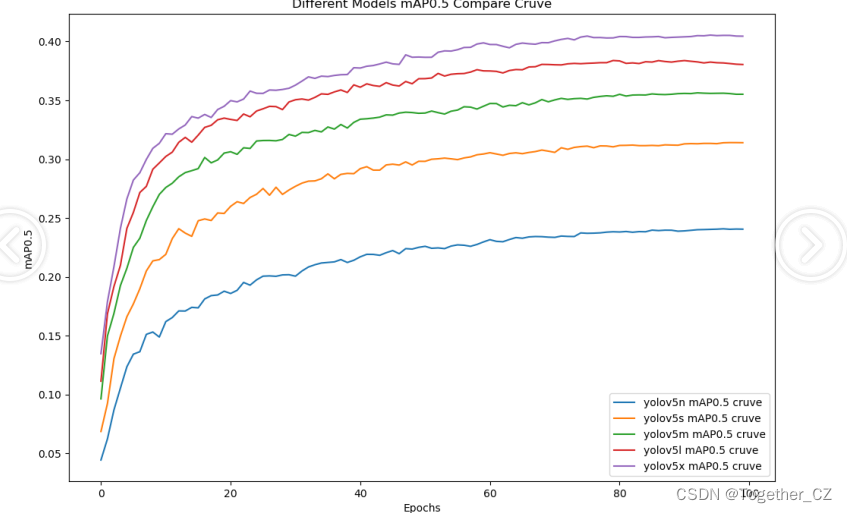
【mAP0.5】
mAP0.5,也被称为mAP@0.5或AP50,指的是当Intersection over Union(IoU)阈值为0.5时的平均精度(mean Average Precision)。IoU是一个用于衡量预测边界框与真实边界框之间重叠程度的指标,其值范围在0到1之间。当IoU值为0.5时,意味着预测框与真实框至少有50%的重叠部分。
在计算mAP0.5时,首先会为每个类别计算所有图片的AP(Average Precision),然后将所有类别的AP值求平均,得到mAP0.5。AP是Precision-Recall Curve曲线下面的面积,这个面积越大,说明AP的值越大,类别的检测精度就越高。
mAP0.5主要关注模型在IoU阈值为0.5时的性能,当mAP0.5的值很高时,说明算法能够准确检测到物体的位置,并且将其与真实标注框的IoU值超过了阈值0.5。
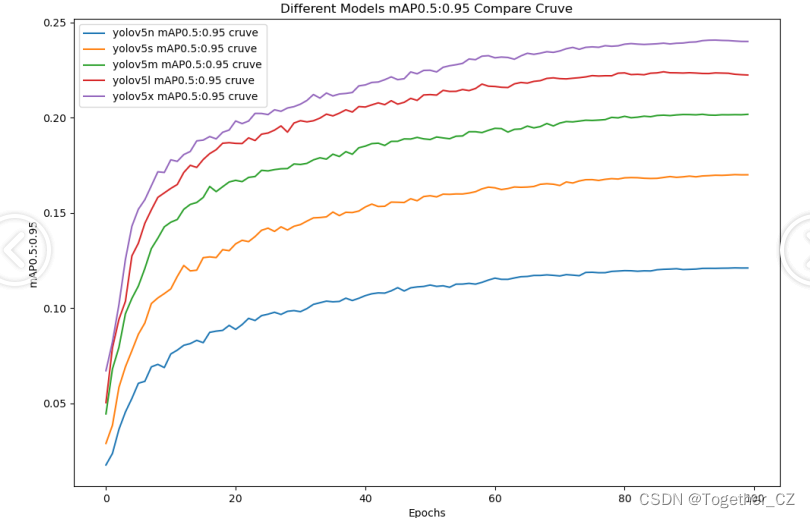
【mAP0.5:0.95】
mAP0.5:0.95,也被称为mAP@[0.5:0.95]或AP@[0.5:0.95],表示在IoU阈值从0.5到0.95变化时,取各个阈值对应的mAP的平均值。具体来说,它会在IoU阈值从0.5开始,以0.05为步长,逐步增加到0.95,并在每个阈值下计算mAP,然后将这些mAP值求平均。
这个指标考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。当mAP0.5:0.95的值很高时,说明算法在不同阈值下的检测结果均非常准确,覆盖面广,可以适应不同的场景和应用需求。
对于一些需求比较高的场合,比如安全监控等领域,需要保证高的准确率和召回率,这时mAP0.5:0.95可能更适合作为模型的评价标准。
综上所述,mAP0.5和mAP0.5:0.95都是用于评估目标检测模型性能的重要指标,但它们的关注点有所不同。mAP0.5主要关注模型在IoU阈值为0.5时的性能,而mAP0.5:0.95则考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。
从整体实验对比结果来看:这五款不同参数量级的模型效果上差异层次分明,n<s<m<l<x。这里我们最终选择使用l系列的模型来作为最终的推理模型,接下来看下l系列模型的内容详情。
【Batch实例】


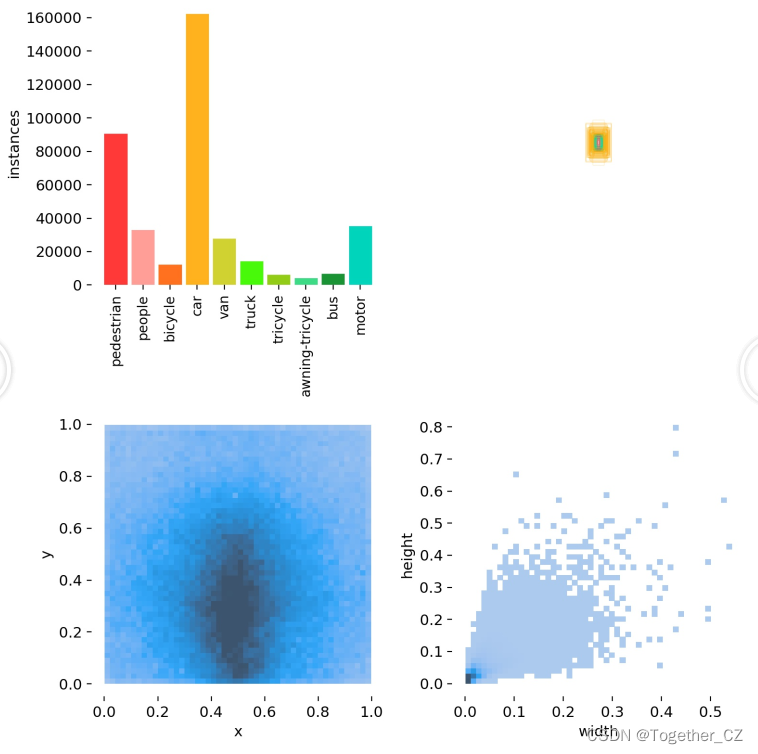
【数据分布可视化】
【PR曲线】
【训练可视化】
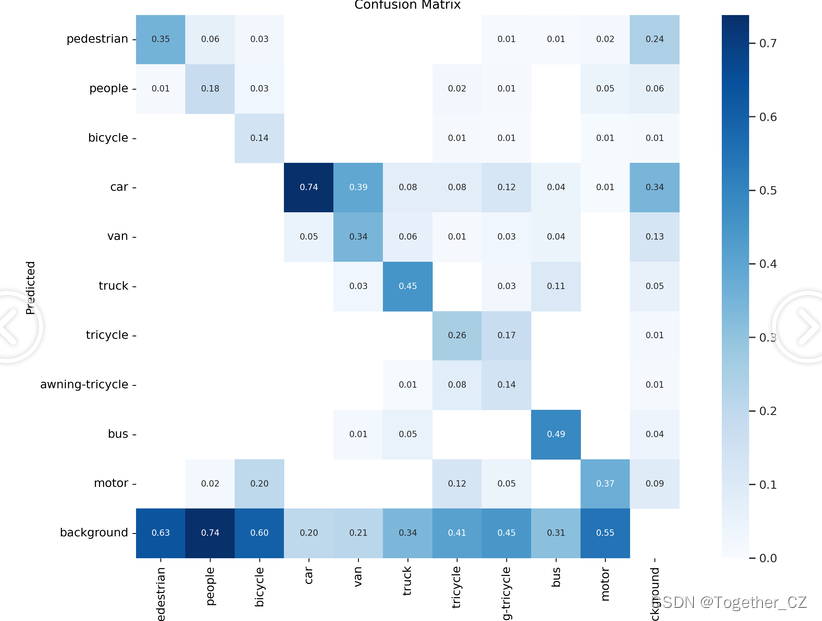
【混淆矩阵】
【离线推理实例】

感兴趣的话都可以自行动手尝试下!
如果自己不具备开发训练的资源条件或者是没有时间自己去训练的话这里我提供出来对应的训练结果可供自行按需索取。
单个模型的训练结果默认YOLOv5s
全系列五个模型的训练结果总集
相关文章:
实践航拍小目标检测,基于YOLOv5全系列【n/s/m/l/x】参数模型开发构建无人机航拍场景下的小目标检测识别分析系统
关于无人机相关的场景在我们之前的博文也有一些比较早期的实践,感兴趣的话可以自行移步阅读即可: 《deepLabV3Plus实现无人机航拍目标分割识别系统》 《基于目标检测的无人机航拍场景下小目标检测实践》 《助力环保河道水质监测,基于yolov…...

分布式数据库中全局自增序列的实现
自增序列广泛使用于数据库的开发和设计中,用于生产唯一主键、日志流水号等唯一ID的场景。传统数据库中使用Sequence和自增列的方式实现自增序列的功能,在分布式数据库中兼容Oracle和MySQL等传统数据库语法,也是基于Sequence和自增列的方式实现…...

【论文阅读】TensoRF: Tensorial Radiance Fields 张量辐射场
发表于ECCV2022. 论文地址:https://arxiv.org/abs/2203.09517 源码地址:https://github.com/apchenstu/TensoRF 项目地址:https://apchenstu.github.io/TensoRF/ 摘要 本文提出了TensoRF,一种建模和重建辐射场的新方法。不同于Ne…...
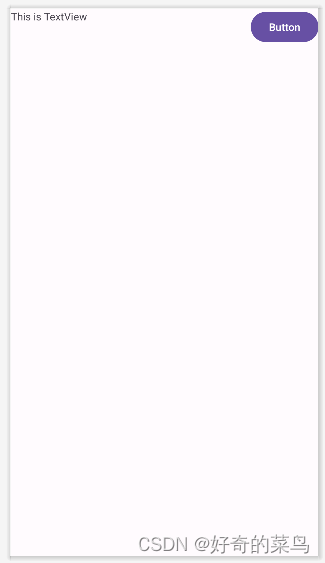
深入了解 Android 中的 FrameLayout 布局
FrameLayout 是 Android 中常用的布局之一,它允许子视图堆叠在一起,可以在不同位置放置子视图。在这篇博客中,我们将详细介绍 FrameLayout 的属性及其作用。 <FrameLayout xmlns:android"http://schemas.android.com/apk/res/androi…...
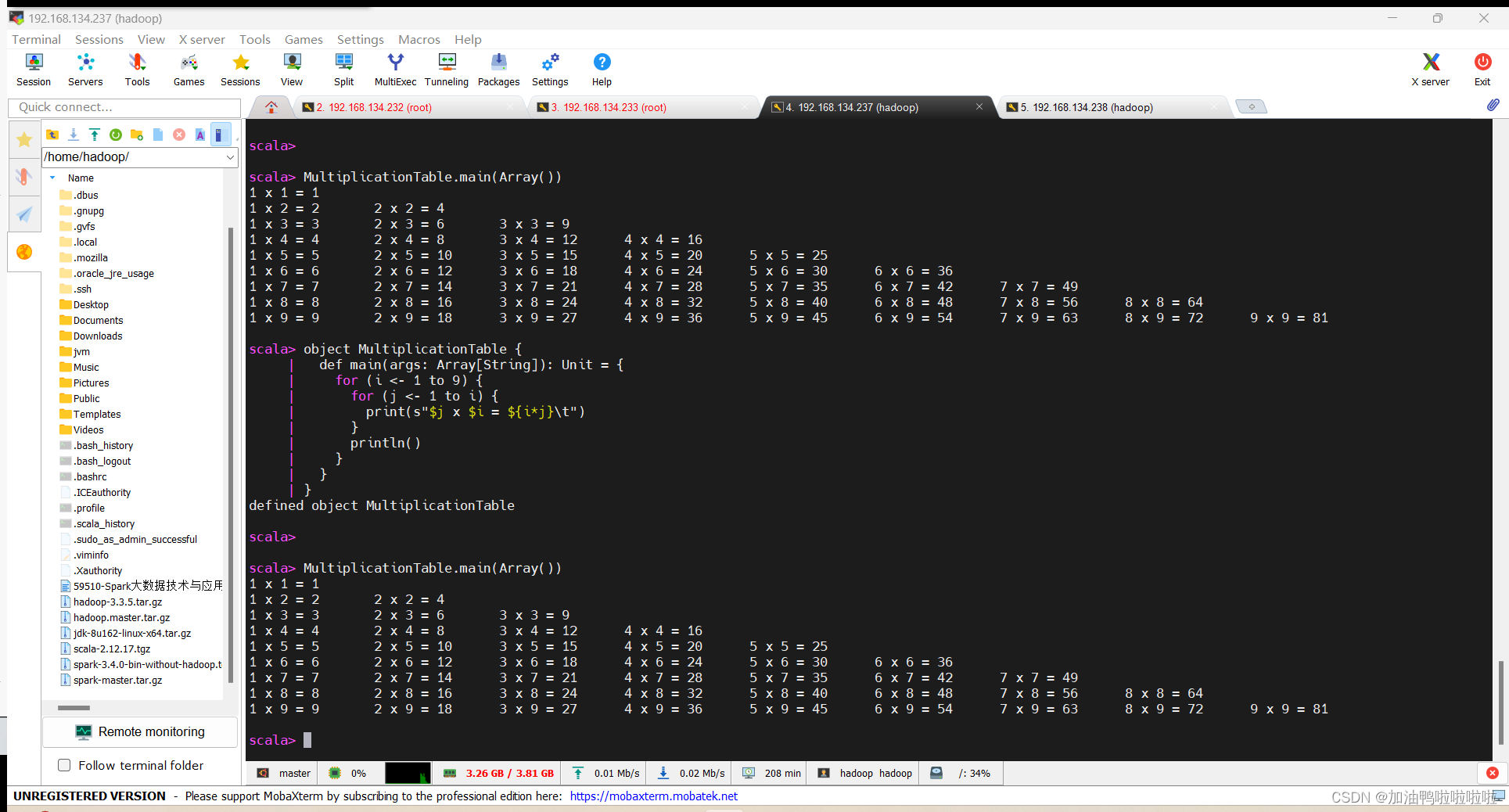
高级大数据技术 实验一 scala编程
高级大数据技术 实验一 scala编程 写的不是很好,大家多见谅! 1. 计算水仙花数 实验目标; (1) 掌握scala的数组,列表,映射的定义与使用 (2) 掌握scala的基本编程 实验说明 …...
使用Fabric创建的canvas画布背景图片,自适应画布宽高
之前的文章写过vue2使用fabric实现简单画图demo,完成批阅功能;但是功能不完善,对于很大的图片就只能显示一部分出来,不符合我们的需求。这就需要改进,对我们设置的背景图进行自适应。 有问题的canvas画布背景 修改后的…...
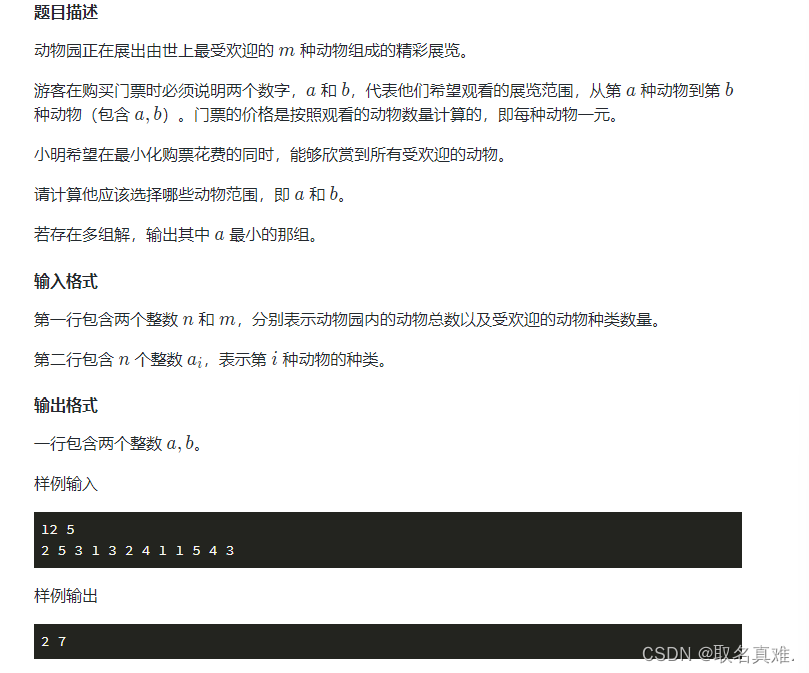
枚举与尺取法(蓝桥杯 c++ 模板 题目 代码 注解)
目录 组合型枚举(排列组合模板()): 排列型枚举(全排列)模板: 题目一(公平抽签 排列组合): 编辑 代码: 题目二(座次问题 全排…...

11、电源管理入门之Regulator驱动
目录 1. Regulator驱动是什么? 2. Regulator框架介绍 2.1 regulator consumer 2.2 regulator core 2.3 regulator driver 3. DTS配置文件及初始化 4. 运行时调用 5. Consumer API 5.1 Consumer Regulator Access (static & dynamic drivers) 5.2 Regulator Outp…...

24年证券从业考试注册报名流程详细图解,千万不要错过报名哦!
(一)时间安排 考生报名缴费时间:3月5日15时至3月8日15时 退费时间:3月7日15时至3月10日15时 准考证打印时间:3月20日15时至3月23日18时 (二)注册流程 1、进入中国证券业协会网站-从业人员管理-考…...
Git入门学习笔记
Git 是一个非常强大的分布式版本控制工具! 在下载好Git之后,鼠标右击就可以显示 Git Bash 和 Git GUI,Git Bash 就像是在电脑上安装了一个小型的 Linux 系统! 1. 打开 Git Bash 2. 设置用户信息(这是非常重要的&…...

⭐每天一道leetcode:27.移除元素(简单;vector)
⭐今日份题目 给你一个数组 nums 和一个值 val,你需要 原地 移除所有数值等于 val 的元素,并返回移除后数组的新长度。 不要使用额外的数组空间,你必须仅使用 O(1) 额外空间并 原地 修改输入数组。 元素的顺序可以改变。你不需要考虑数组中…...

如何处理Android内存泄漏和性能优化
处理Android内存泄漏和性能优化是一个复杂的过程,涉及到对应用的深入理解和良好的编程习惯。以下是一些关键的步骤和建议: 1. **理解内存泄漏的本质**: - 内存泄漏(Memory Leak)发生在程序中,当不再需要…...
应用方案 | D722 9MHz,轨对轨I/O CMOS运放,低噪声、低电压、低功耗运放,应用广泛
D722是低噪声、低电压、低功耗运放,应用广泛。D722具有9MHz的高增益带宽积,转换速率为8.5V/μs,静态电流为1.7mA(5V电源电压)。 D722具有低电压、低噪声的特点,并提供轨到轨输出能力,D722的最大…...

小程序常用样式和组件
常用样式和组件 1. 组件和样式介绍 在开 Web 网站的时候: 页面的结构由 HTML 进行编写,例如:经常会用到 div、p、 span、img、a 等标签 页面的样式由 CSS 进行编写,例如:经常会采用 .class 、#id 、element 等选择器…...
《Redis 设计与实现》读书概要
注: 《Redis 设计与实现》一书基于 Redis 2.9 版本编写,部分内容已过时,过时之处本文会有所说明。本文为读书笔记,部分简单和日常使用较少的知识点未记录。原书网页版地址 https://redisbook.com/ 一、底层数据结构 SDS(Simple Dy…...

Docker之数据卷自定义镜像
文章目录 前言一、数据卷二、自定义镜像 前言 Docker提供了一个持久化存储数据的机制,与容器生命周期分离,从而带来一系列好处: 总的来说Docker 数据卷提供了一种灵活、持久、可共享的存储机制,使得容器化应用在数据管理方面更加…...
Docker技术概论(4):Docker CLI 基本用法解析
Docker技术概论(4) Docker CLI 基本用法解析 - 文章信息 - Author: 李俊才 (jcLee95) Visit me at: https://jclee95.blog.csdn.netMy WebSite:http://thispage.tech/Email: 291148484163.com. Shenzhen ChinaAddress of this article:http…...

【JAVA重要知识 | 第五篇】暴打Java8新特性—(Lambda、方法引用、Stream流、函数式接口、Date Time API、Optional类)
文章目录 5.Java8新特性5.1新特性列表5.2Lambda 表达式5.2.1函数式思想5.2.2举例(1)方式一:创建对象(2)方式二:匿名内部类(3)方式三:Lambda 5.2.3Lambda表达式的标准格式…...
Docker Swarm全解析:实现微服务高可用与故障转移的秘密武器
🐇明明跟你说过:个人主页 🏅个人专栏:《Docker入门到精通》 《k8s入门到实战》🏅 🔖行路有良友,便是天堂🔖 目录 一、基本概念和介绍 1、Docker Swarm 是什么,它与 …...
)
编码规范(前端)
文章目录 1. 文档说明1.1 编制说明1.2 名词解释 2.前端研发规范2.1 HTML编码规范2.1.1 文档类型2.1.2 语言2.1.3 元数据2.1.4 资源加载2.1.5 页面标题2.1.6 编码风格2.1.7 标签2.1.8 属性2.1.9 语义化 2.2 CSS编码规范2.2.1 文件引用2.2.2 命名-组成元素 知识点 1. 文档说明 1…...

如何永久免费使用Cursor Pro?终极破解工具完整指南
如何永久免费使用Cursor Pro?终极破解工具完整指南 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your trial …...
 I2C CST816T触摸屏适配)
全志 V821 韦东山 Avaota-F1-B (3) I2C CST816T触摸屏适配
功能还在调试一、硬件连接/**********CST816T********** 1.引脚连接 PD18 -> i2c_clk PD18 -> i2c_sda PD22 -> tp_rst PD23 -> tp_int二、设备树修改tina-v821-v1.3/device/config/chips/v821/configs/avaota_f1/linux-5.4-ansc/board.dtstwi1_pins_default: twi1…...

2026终极测评:16款降AIGC工具横评,论文降重降ai率终极答案!
随着AI写作技术的迅猛发展,越来越多的学术创作者开始依赖各类生成工具提升效率。然而,2026年各大高校与科研机构对AIGC内容的检测标准愈发严格,论文中的一丝AI痕迹都可能成为被质疑的导火索。面对日益严峻的查重与AIGC检测压力,如…...

Nginx缓慢HTTP攻击防护:从Slowloris原理到四层生产加固
1. 这不是误报:缓慢HTTP拒绝服务攻击的真实杀伤力与Nginx暴露面 “检测到目标主机可能存在缓慢的http拒绝服务攻击”——当安全扫描工具弹出这行提示时,很多运维同学的第一反应是点掉、忽略、加白名单。我见过三次真实事故:一次是电商大促前…...

2026年开发者必备:JetBrains IDE无限试用重置完全指南
2026年开发者必备:JetBrains IDE无限试用重置完全指南 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter 当你正在专注编写代码时,IDE突然弹出"试用期已结束"的警告,那种…...

Unity AssetBundle全生命周期管理实战:打包、上传、加载与卸载闭环指南
1. 这不是“打包完就完事”的流程,而是一条必须闭环的资源生命线在Unity项目做到中后期,你大概率会遇到这几个扎心时刻:打包后安装包体积突然暴涨300MB,美术说“就加了5张贴图”,程序查了一天发现是某张HDR天空盒被错误…...

咖啡一杯,Token 无限,Real-Time Cafe 深圳站来了!新增「硬件晒晒桌」与「AI 桌游试玩桌」
咖啡一杯,Token 无限——「Real-Time Cafe」是一个让开发者聚在一起实时 coding、实时 debug、实时互动的咖啡馆快闪计划。 Real-Time Cafe 深圳站来了!就在本周日 5 月 24 日下午。 本站特设「硬件晒晒桌」与「AI 桌游试玩桌」——带上你的电子宠物、…...

在OpenClaw Agent工作流中无缝接入Taotoken调用多模型能力
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在OpenClaw Agent工作流中无缝接入Taotoken调用多模型能力 对于使用OpenClaw构建智能体工作流的开发者而言,能够灵活调…...

SAP ABAP实战:用BAPI_PO_CREATE1创建采购订单时,如何彻底隐藏PBXX条件类型?
SAP ABAP实战:彻底隐藏BAPI_PO_CREATE1中的PBXX条件类型 最近在实施一个外协加工采购项目时,遇到了一个让人头疼的问题:使用BAPI_PO_CREATE1创建采购订单时,系统总是自动生成价格为0的PBXX条件类型行。这看起来像是个小问题&…...

QKeyMapper:免费开源的Windows按键映射工具,彻底解放你的操作习惯
QKeyMapper:免费开源的Windows按键映射工具,彻底解放你的操作习惯 【免费下载链接】QKeyMapper [按键映射工具] QKeyMapper,Qt开发Win10&Win11可用,不修改注册表、不需重新启动系统,可立即生效和停止。支持游戏手柄…...