从零开始学习PX4源码2(PX4姿态误差计算)
目录
文章目录
- 目录
- 摘要
- 1.源码
- 1.1源码路径
- 1.2源码程序
- 1.3源码功能
- 2.源码分析
摘要
本节主要记录PX4姿态误差计算过程,欢迎批评指正。
1.源码
1.1源码路径
PX4-Autopilot/src/modules/mc_att_control/AttitudeControl/AttitudeControl.cpp
1.2源码程序
matrix::Vector3f AttitudeControl::update(const Quatf &q) const
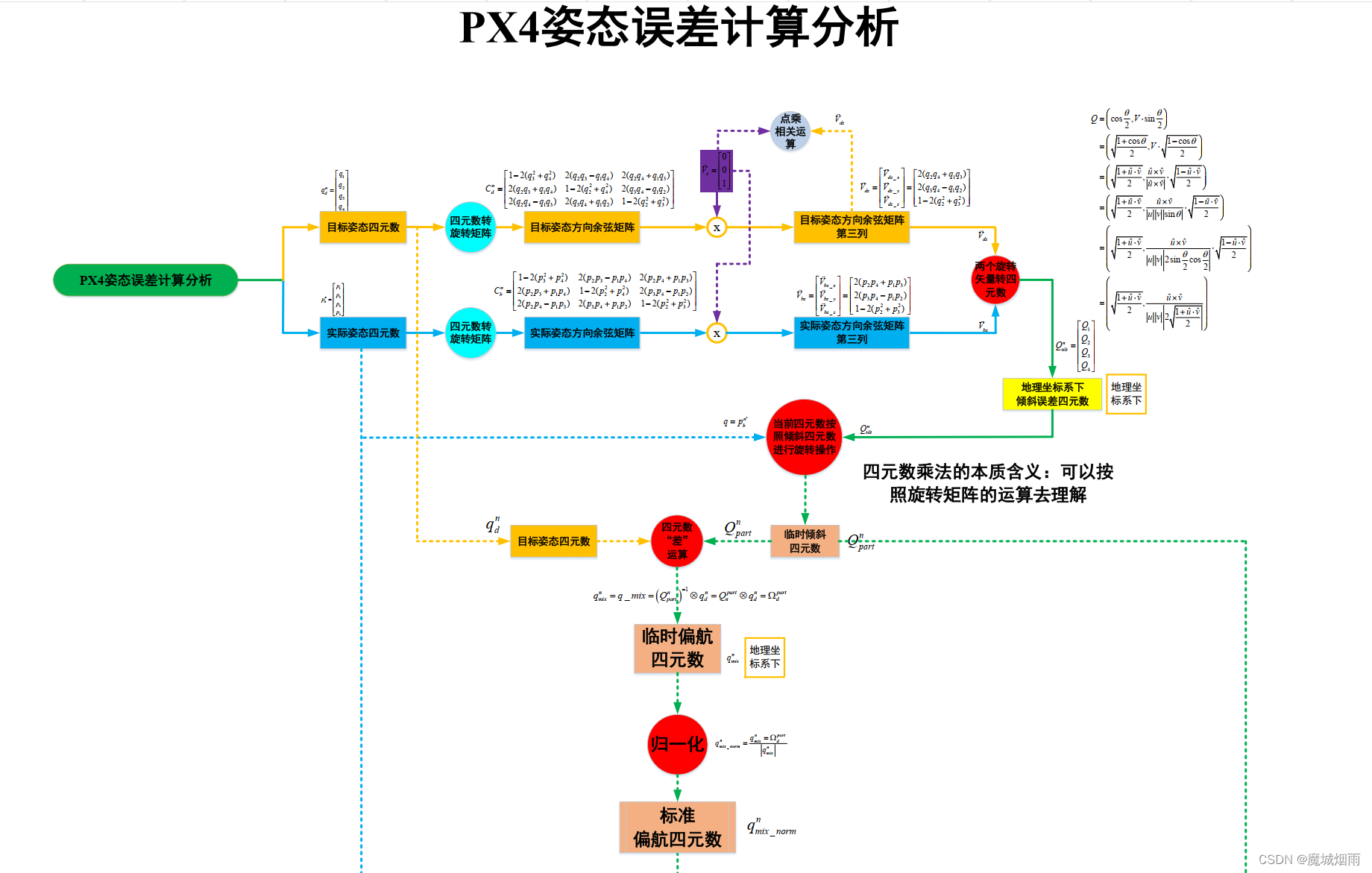
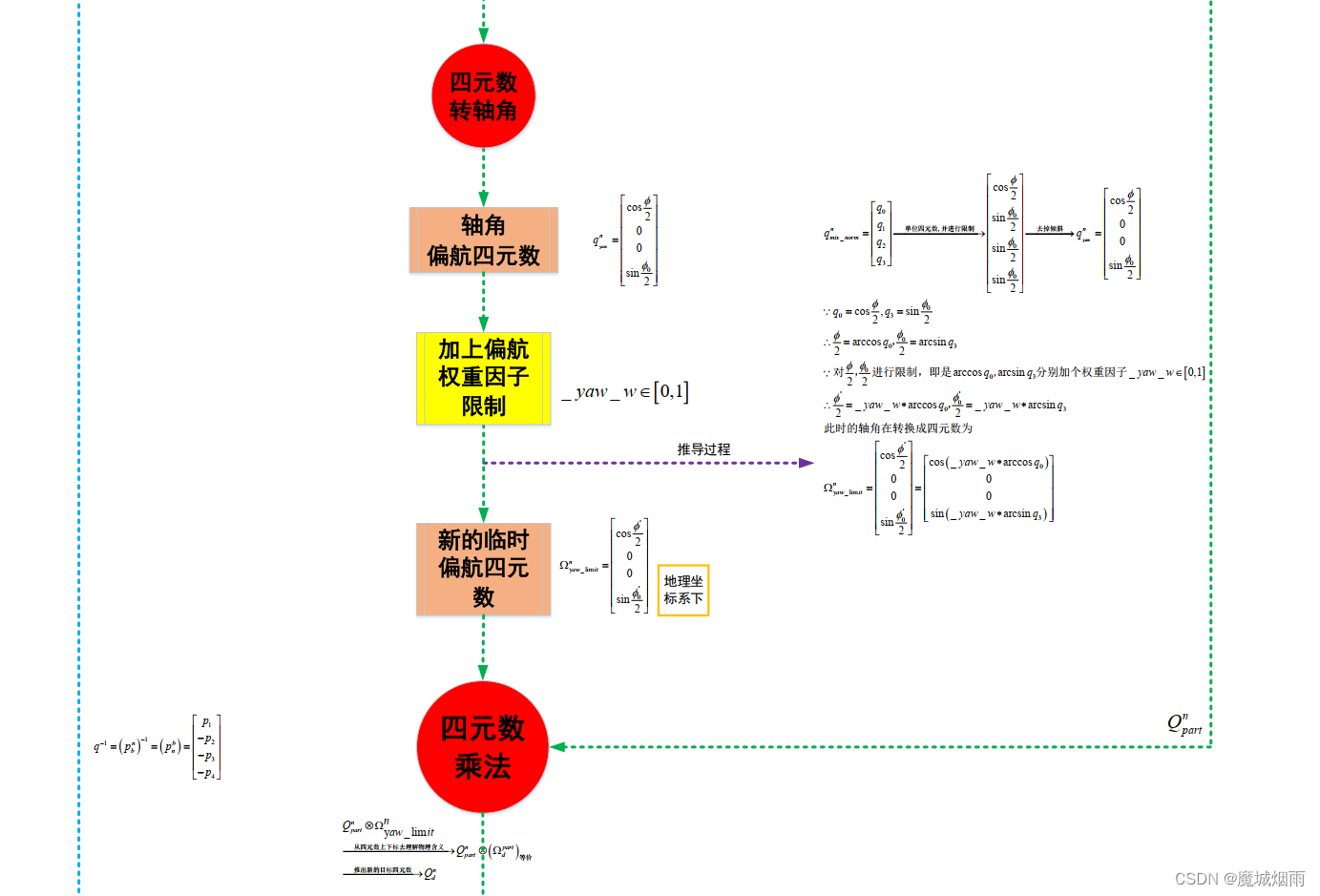
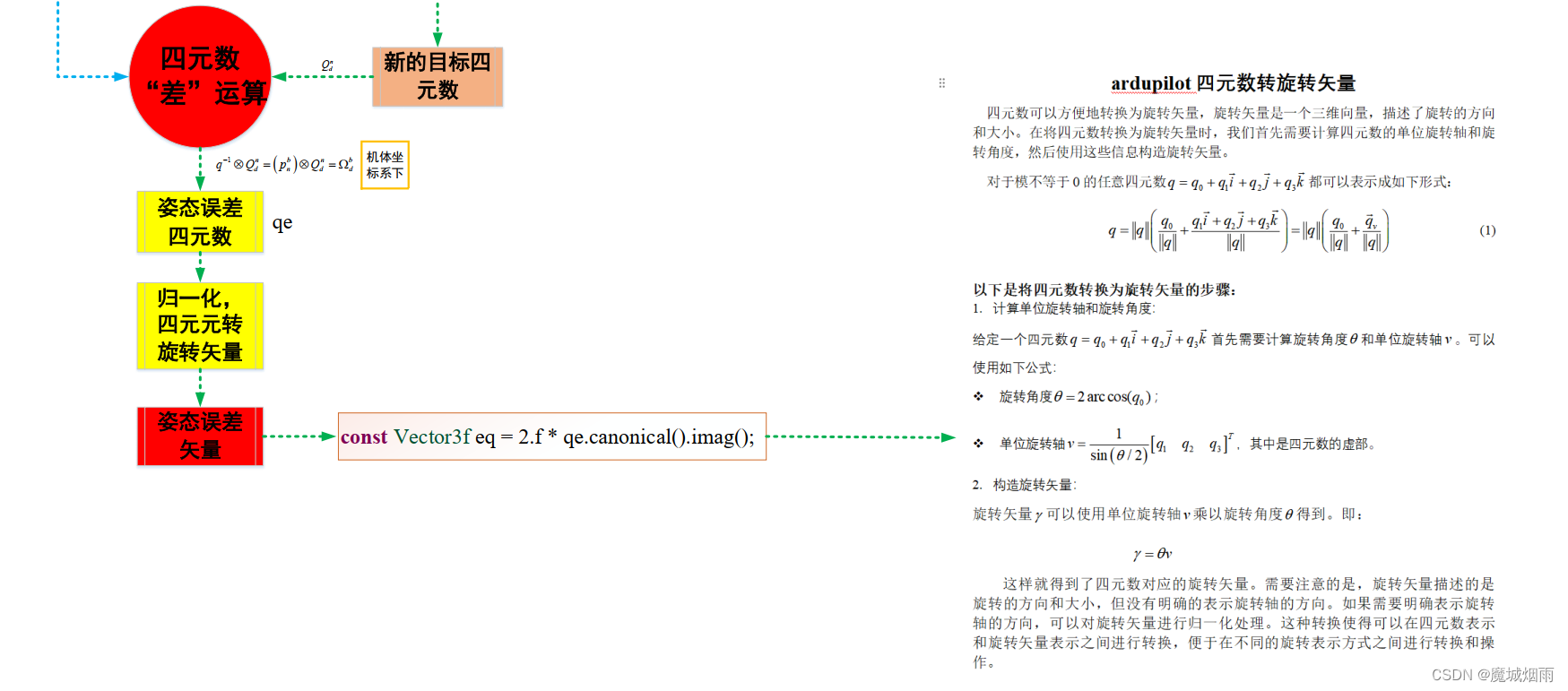
{Quatf qd = _attitude_setpoint_q;// calculate reduced desired attitude neglecting vehicle's yaw to prioritize roll and pitchconst Vector3f e_z = q.dcm_z();const Vector3f e_z_d = qd.dcm_z();Quatf qd_red(e_z, e_z_d);if (fabsf(qd_red(1)) > (1.f - 1e-5f) || fabsf(qd_red(2)) > (1.f - 1e-5f)){// In the infinitesimal corner case where the vehicle and thrust have the completely opposite direction,// full attitude control anyways generates no yaw input and directly takes the combination of// roll and pitch leading to the correct desired yaw. Ignoring this case would still be totally safe and stable.qd_red = qd;} else{// transform rotation from current to desired thrust vector into a world frame reduced desired attitudeqd_red *= q;}// mix full and reduced desired attitudeQuatf q_mix = qd_red.inversed() * qd;q_mix.canonicalize();// catch numerical problems with the domain of acosf and asinfq_mix(0) = math::constrain(q_mix(0), -1.f, 1.f);q_mix(3) = math::constrain(q_mix(3), -1.f, 1.f);qd = qd_red * Quatf(cosf(_yaw_w * acosf(q_mix(0))), 0, 0, sinf(_yaw_w * asinf(q_mix(3))));// quaternion attitude control law, qe is rotation from q to qdconst Quatf qe = q.inversed() * qd;// using sin(alpha/2) scaled rotation axis as attitude error (see quaternion definition by axis angle)// also taking care of the antipodal unit quaternion ambiguityconst Vector3f eq = 2.f * qe.canonical().imag();// calculate angular rates setpointVector3f rate_setpoint = eq.emult(_proportional_gain);// Feed forward the yaw setpoint rate.// yawspeed_setpoint is the feed forward commanded rotation around the world z-axis,// but we need to apply it in the body frame (because _rates_sp is expressed in the body frame).// Therefore we infer the world z-axis (expressed in the body frame) by taking the last column of R.transposed (== q.inversed)// and multiply it by the yaw setpoint rate (yawspeed_setpoint).// This yields a vector representing the commanded rotatation around the world z-axis expressed in the body frame// such that it can be added to the rates setpoint.if (std::isfinite(_yawspeed_setpoint)){rate_setpoint += q.inversed().dcm_z() * _yawspeed_setpoint;}// limit ratesfor (int i = 0; i < 3; i++){rate_setpoint(i) = math::constrain(rate_setpoint(i), -_rate_limit(i), _rate_limit(i));}return rate_setpoint;
}
1.3源码功能
实现姿态误差计算,得到目标角速度。
2.源码分析
对应的PDF下载地址:
下载地址
相关文章:
从零开始学习PX4源码2(PX4姿态误差计算)
目录 文章目录 目录摘要1.源码1.1源码路径1.2源码程序1.3源码功能 2.源码分析 摘要 本节主要记录PX4姿态误差计算过程,欢迎批评指正。 1.源码 1.1源码路径 PX4-Autopilot/src/modules/mc_att_control/AttitudeControl/AttitudeControl.cpp1.2源码程序 matrix::…...
git安装与使用4.3
一、git的安装 1、下载git包 下载git包url:https://git-scm.com/download/win 下载包分为:64位和32位 2、点击安装包 2、选择安装路径 3、 点击下一步 4、点击next 5、点击next 6、点击next 7、 8、 9、 10、 11、 12、在桌面空白处,右键…...
Python:关于数据服务中的Web API的设计
搭建类似joinquant、tushare类似的私有数据服务应用,有以下一些点需要注意: 需要说明的是,这里讨论的是web api前后端,当然还有其它方案,thrift,grpc等。因为要考虑到一鱼两吃,本文只探讨web ap…...

VMwareWorkstation17.0虚拟机安装搭建PcDos2000虚拟机(完整图文详细步骤教程)
VMwareWorkstation17.0虚拟机安装搭建PcDos2000虚拟机(完整图文详细步骤教程) 一、PcDos20001.PcDos2000简介2.PcDos2000下载 二、创建PcDos2000虚拟机1.新建虚拟机2.类型配置3.类型配置4.选择版本5.命名、存位置6.磁盘容量7.调整虚拟配置7.1 调整虚拟配…...
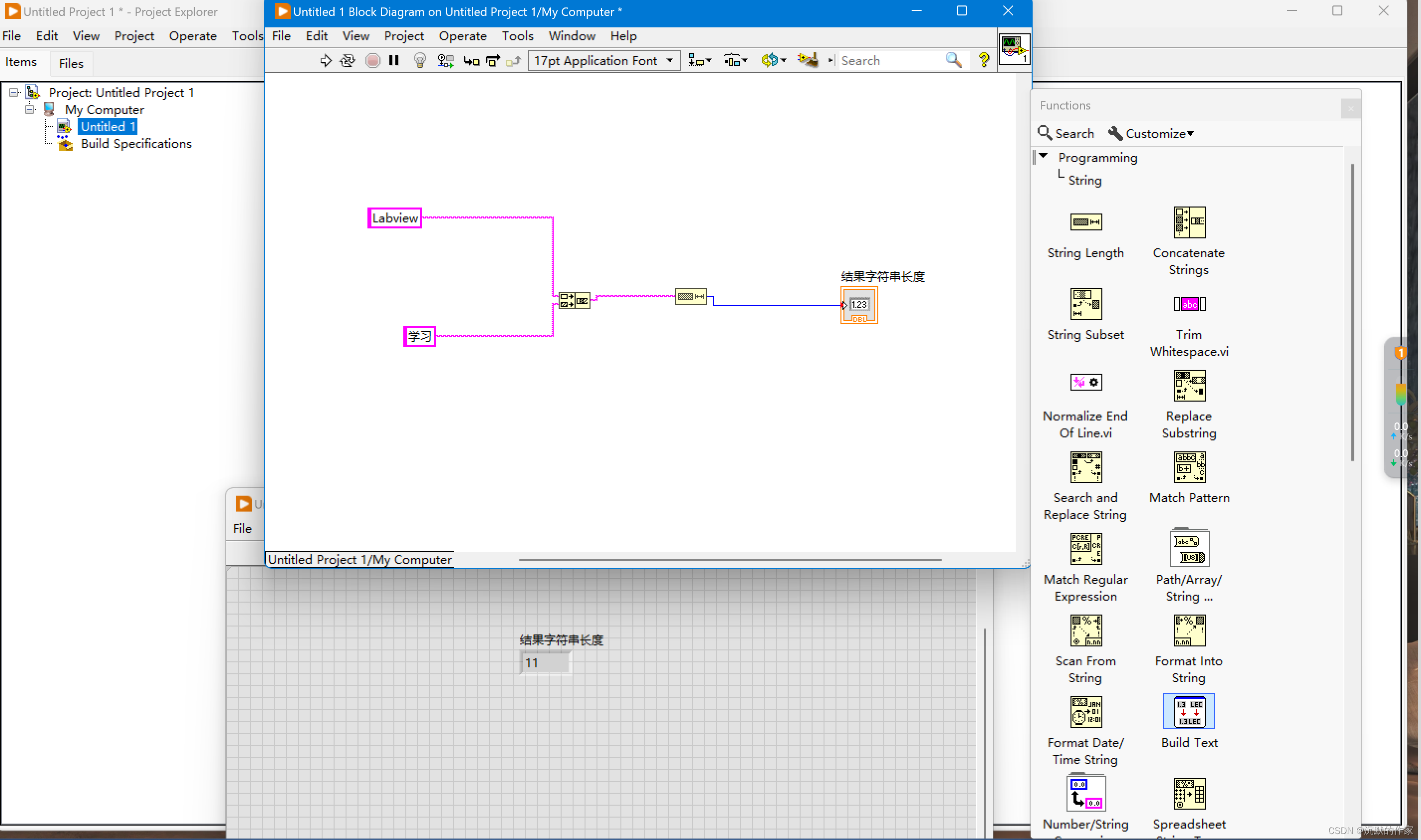
第七个程序:两个字符串连接后计算长度
实验步骤; 第一步:新建项目 第二步:程序编写 第三步:运行结果 Labview一共7个字节,长度为7,一个字母一个字节 汉字为2个字节,图一为4,图二为8 所以结果分别为11和15 视频教学: 字…...

【大数据】-- dataworks 创建odps 的 hudi 外表
文档:创建OSS外部表_云原生大数据计算服务 MaxCompute(MaxCompute)-阿里云帮助中心 举例:创建 odps 的 hudi 外表 CREATE EXTERNAL TABLE IF NOT EXISTS my_project.ods_hudi_mysql_words_h_all (id BIGINT COMMENT 主键id,`words` STRING COMMENT 词…...

ChatGPT与GEE+ENVI+python高光谱,多光谱等成像遥感数据处理技术
原文链接:ChatGPT与GEEENVIpython高光谱,多光谱等成像遥感技术 第一遥感科学与AI基础 一:遥感科学的基本原理和历史 从摄影侦察到卫星图像 遥感的基本原理 遥感的典型应用 最新进展和未来趋势 二:ChatGPT 什么是ChatGPT&a…...

学习linux从0到初级工程师-3
一、LNMP 1.1 搭建LNMP LNMP:LinuxNginxMysqlPHP LNMP优势: 1.web服务器一种,Nginx处理静态文件、索引文件,自动索引的效率非常高; 2.作为代理服务器,Nginx可以实现无缓存的反向代理加速,提高网站运行…...
java实现文件上传到本地
很多时候我们都需要进行文件上传和下载的操作,具体怎么实现网上的代码其实也是挺多的,刚好我的项目中也遇到了文件上传和下载的需求,本篇博文具体讲解上传操作,下篇博文讲解下载操作。 我们具体来想一想要将一个从前端传来的文件…...
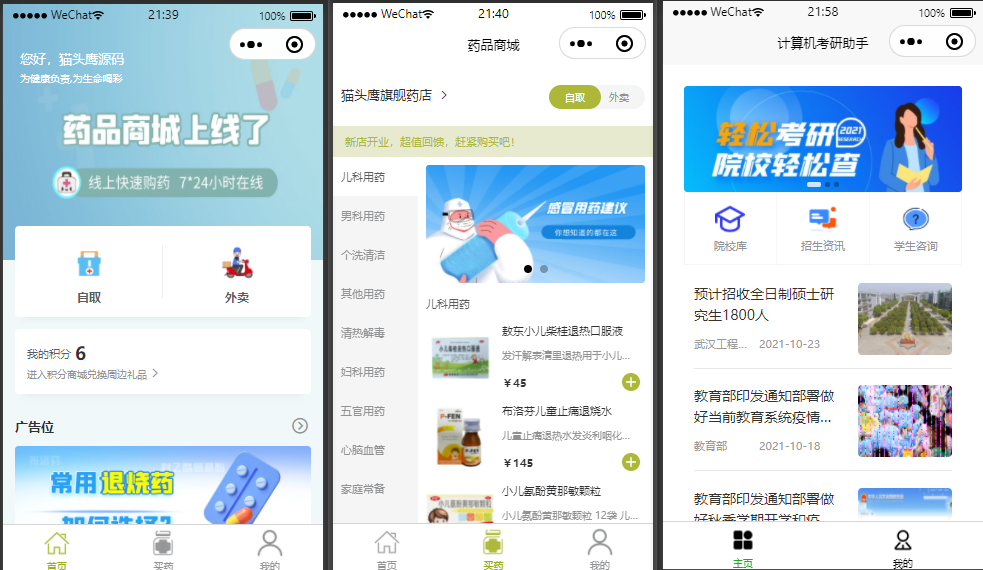
基于springboot+vue的多媒体素材库的开发与应用系统
博主主页:猫头鹰源码 博主简介:Java领域优质创作者、CSDN博客专家、阿里云专家博主、公司架构师、全网粉丝5万、专注Java技术领域和毕业设计项目实战,欢迎高校老师\讲师\同行交流合作 主要内容:毕业设计(Javaweb项目|小程序|Pyt…...

《GitHub新手入门指南:从零开始掌握基本用法》
在现代软件开发和技术社区中,GitHub已经成为了一个不可或缺的平台。它不仅是一个代码托管平台,更是一个技术交流、学习分享的社交平台。但对于初学者来说,GitHub可能会有些令人望而却步。本文将详细介绍GitHub的基本用法,帮助新手快速入门并融入这个充满活力的技术社区。 …...

K8S存储卷与PV,PVC
一、前言 Kubernetes(K8s)中的存储卷是用于在容器之间共享数据的一种机制。存储卷可以在多个Pod之间共享数据,并且可以保持数据的持久性,即使Pod被重新调度或者删除,数据也不会丢失。 Kubernetes支持多种类型的存储卷…...
简答题汇总)
(科目三)简答题汇总
模块一 信息和计算机基础 一、简述信息的的特征 【记忆技巧】普传功夫真驾驶 普遍性:信息是无时不有的,无时不在的载体依附性:信息不能独立存在,必须有载体。价值性:同一则信息,对不同的人来说,价值不同。时效性:同…...

8、Redis-Jedis、Lettuce和一个Demo
目录 一、Jedis 二、Lettuce 三、一个Demo Java集成Redis主要有3个方案:Jedis、Lettuce和Redisson。 其中,Jedis、Lettuce侧重于单例Redis,而Redisson侧重于分布式服务。 项目资源在文末 一、Jedis 1、创建SpringBoot项目 2、引入依赖 …...
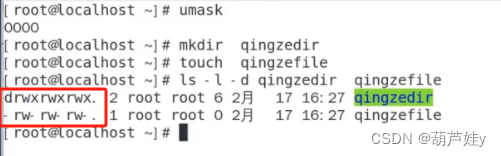
(Linux学习六)用户特殊权限类型,suid,chattr,umask
一、特殊位suid,针对文件/程序时,具备临时提升权限 分析:root运行是超管的权限,普通用户运行时是普通用户的权限 root /usr/bin/cat(root) /root/file1.txt ok alice/usr/bin/cat(alice) /root/file1.txt 无法访问rootchmod us filename …...
)
Mysql 数据类型的转换之 cast()
语法 cast( value as type) value 要进行数据转换的值(可以为任何类型)。type 要转换为的数据类型。type 的常见的类型可以为 : decimal十进制浮点数。可以使用可选的 M 和 D 参数指定最大位数 (M) 和小数点后的位数 (D)float浮点数dou…...

python重命名指定文件夹下的所有文件
最近要测试OCR功能,图片的命名有点杂乱无章.每次找指定名字的图片非常的不容易,所以写了一个小工具来重名了所有的图片. 我这里就用0001到9999的字符串命名了. import os def rename_files(folder_path):# 获取文件夹中所有文件名files os.listdir(folder_path)num 1# 遍历…...

通过多线程并发方式实现服务器
与多进程实现对比来看。 示例来源于网络视频 #include <stdio.h> #include <string.h> #include <arpa/inet.h> #include <pthread.h> #include <ctype.h> #include <unistd.h> #include <fcntl.h>#include "wrap.h"#de…...

【C语言】指针超级无敌金刚霹雳进阶(但不难,还是基础)
点击这里访问我的博客主页~~ 对指针概念还不太清楚的点击这里访问上一篇指针初阶2.0 上上篇指针初阶1.0 谢谢各位大佬的支持咯 今天我们一起来学习指针进阶内容 指针进阶 一、指针变量1、字符指针变量2、数组指针变量①数组指针变量的定义②数组指针变量的初始化 3、函数指…...
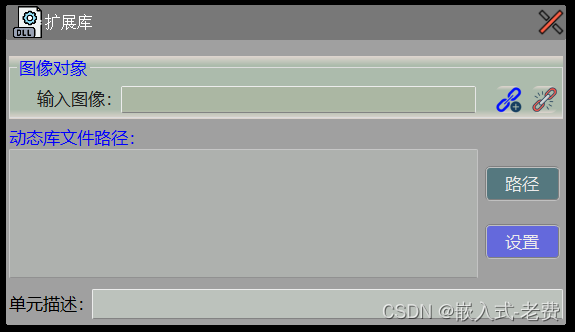
上位机图像处理和嵌入式模块部署(qmacvisual入门)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 虽然我们前面学习了很多的知识点,比如说在windows这边,用qt写界面,用opencv写图像处理代码;在linux…...
)
探灵直播2026最新官方正版免费下载 一键转存 永久更新 (看到速转存 资源随时走丢)
下载链接 本文将为您客观介绍《探灵直播》的幕后作者、核心玩法机制,并将其与同类型竞品进行简单的横向对比,带您全面了解这款作品的独特之处。 一、 幕后作者:专注于美少女题材的 qureate 《探灵直播》的开发商 qureate 是一家在日本游戏界…...

AI写作辅助网站的使用规范:如何让AI生成内容通过严格学术审查
"论文写到一半卡住了,还能不能用AI?""AI生成的内容会被查出来吗?""学校不让用AI,但不靠它我真的写不完!"2026年的毕业季,论文写作的焦虑比往年更甚。面对日益严格的学术审查…...

ElevenLabs台湾话语音上线后用户留存率骤降47%?揭秘方言语料清洗盲区与3步合规性校验法
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs台湾话语音上线后用户留存率骤降47%?揭秘方言语料清洗盲区与3步合规性校验法 ElevenLabs于2024年Q2正式上线台湾话(闽南语)语音合成服务,初期D…...

抖音批量下载器终极指南:3步轻松搞定无水印视频下载
抖音批量下载器终极指南:3步轻松搞定无水印视频下载 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support…...

ncmdumpGUI:3分钟解锁网易云音乐NCM加密文件,让音乐自由流动
ncmdumpGUI:3分钟解锁网易云音乐NCM加密文件,让音乐自由流动 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 当智能音箱对你说"不…...

Photoshop图层批量导出终极指南:告别手动操作的时代
Photoshop图层批量导出终极指南:告别手动操作的时代 【免费下载链接】Photoshop-Export-Layers-to-Files-Fast This script allows you to export your layers as individual files at a speed much faster than the built-in script from Adobe. 项目地址: https…...

Pure Live完整指南:3分钟掌握跨平台纯净直播聚合工具
Pure Live完整指南:3分钟掌握跨平台纯净直播聚合工具 【免费下载链接】pure_live A Flutter project can make you watch live with ease. 项目地址: https://gitcode.com/gh_mirrors/pu/pure_live 在当今数字娱乐时代,直播已成为人们日常娱乐的重…...
与返回值)
Python运算符:比较运算符(等于不等等于大于小于)与返回值
Python运算符:比较运算符(等于不等等于大于小于)与返回值📚 本章学习目标:深入理解比较运算符(等于不等等于大于小于)与返回值的核心概念与实践方法,掌握关键技术要点,了…...

ARMv8 A64内存拷贝指令CPYFPRTWN详解与优化
1. A64内存拷贝指令概述 在ARMv8架构中,内存拷贝操作是系统编程和底层优化的基础功能。CPYF*系列指令作为A64指令集的重要组成部分,提供了硬件级的内存数据搬运能力。与传统的软件循环拷贝相比,这些指令具有显著的性能优势: 单指…...
)
保姆级教程:在K8s集群上部署Triton Inference Server服务(含TensorRT加速配置)
生产级K8s集群部署Triton Inference Server全流程指南 在AI模型工业化落地的浪潮中,如何将训练好的模型高效、稳定地部署到生产环境,成为众多技术团队面临的共同挑战。本文将聚焦Kubernetes集群环境,详细拆解NVIDIA Triton Inference Server…...