49.在ROS中实现local planner(2)- 实现Purepersuit(纯跟踪)算法
48.在ROS中实现local planner(1)- 实现一个可以用的模板实现了一个模板,接下来我们将实现一个简单的纯跟踪控制,也就是沿着固定的路径运动,全局规划已经规划出路径点,基于该路径输出相应的控制速度
1. Pure Pursuit
Pure Pursuit路径跟随便是基于受约束移动机器人圆周运动的特性所开发出来的运动控制方式。原理十分简单,如图所示,移动机器人有一个前视的搜索半径,与机器人规划的路径有一个焦点,假设机器人从当前位置到路径焦点的运动为圆周运动。其中的前视距离便是图1中的L。根据几何关系便可以计算机器人的运动半径。

受约束的机器人模型(不能横向运动)可由两个控制量组成,即运动参考点的线速度v与角速度w。在极短的运行周期中,机器人都是以固定的线速度与角速度运动。因此机器人的运动可以视为圆周运动(w=0时为直线运动)。
2. 运动半径推算
如图所示的机器人便是绕着一个旋转中心进行圆周运动,于是移动机器人的运动控制可视为求解其在运动过程中的实时旋转半径。图中,r为移动机器人的旋转半径。
我们以base坐标系为例,及当前机器人为坐标原点,x轴为前方,y轴为左方,即ROS的坐标系,(x,y)为目标点, L为距离目标点的距离(前视距离),如下计算,容易求得旋转半径r
由图可得d=r−yd = {r - y} d=r−y
d2+x2=r2d^2+x^2 = r^2 d2+x2=r2
即:r2−2ry+y2+x2=r2r^2-2ry+y^2+x^2 = r^2 r2−2ry+y2+x2=r2
即:x2+y2=2ryx^2+y^2 = 2ry x2+y2=2ry
即:L2=2ryL^2 = 2ry L2=2ry
即:r=L2/2yr = L^2/2y r=L2/2y
即运动半径=前视距离的平方/两倍的y
我们知道r=v/w 即我们只需要给定v/w为固定的值即可
因v与L相关 我们取一次关系
令v=aL a为长数项
可得w=v/r=a*2y/L
3. 坐标转换
我们知道setPlan下发的坐标一般使用的是map坐标系,我们计算的时候需要转换为base坐标系
我们可以使用init接口提供的tf::TransformListener即可完成, (1.14.0版本后接口更新,使用新的接口)
geometry_msgs::PoseStamped PurepursuitPlanner::goalToBaseFrame(const geometry_msgs::PoseStamped& goal_pose_msg) {#if ROS_VERSION_GE(ROS_VERSION_MAJOR, ROS_VERSION_MINOR, ROS_VERSION_PATCH, 1, 14, 0)geometry_msgs::PoseStamped goal_pose, base_pose_msg;goal_pose = goal_pose_msg;goal_pose.header.stamp = ros::Time(0.0);try {base_pose_msg = tf_->transform(goal_pose, "base_link");} catch (tf2::TransformException& ex) {ROS_WARN("transform err");return base_pose_msg;}#elsegeometry_msgs::PoseStamped base_pose_msg;tf::Stamped<tf::Pose> goal_pose, base_pose;poseStampedMsgToTF(goal_pose_msg, goal_pose);goal_pose.stamp_ = ros::Time();try {tf_->transformPose(costmap_ros_->getBaseFrameID(), goal_pose, base_pose);} catch (tf::TransformException& ex) {ROS_WARN("transform err");return base_pose_msg;}tf::poseStampedTFToMsg(base_pose, base_pose_msg);#endifreturn base_pose_msg;}4. 前视距离
我们不断根据当前位置,更新前视距离,通过前面的接算,给定速度
4.1 前视距离大小设置
前世距离可以根据V我们预设速度相关
-
如果前世距离较大,相当于路径采样间隔较大,跟踪路径与规划路径的偏差会大。
-
如果前世距离较小,机器人容易抖动
4.2 前视距离更新策略
如果当前距离路径中前视距离的点后的n个点的距离小于前世距离,则更新前视距离
即如果当前前视距离的点在路径索引为n,则判断n+m索引距离当前点位置是否小于预设前视距离值
5. 速度限制
一般机器人小车,线速度是>0的即,只能前进,无法后退。这就需要我们新增当前前视点角度判断, 如果角度超过90,即在车的后方。可以对速度修正强制旋转
auto target_yaw_diff = atan2(goal.pose.position.y, goal.pose.position.x); // 当前目标点相对机器人的角度.... // 计算半径 速度// 当前目标点相对机器人的角度 相差较大(即目标点在机器人后面), 需要直发角速度(即原地旋转), 转向目标点if (target_yaw_diff > PI*0.5) {cmd_vel.linear.x = 0;cmd_vel.angular.z = 0.8;} else if (target_yaw_diff < -PI*0.5) {cmd_vel.linear.x = 0;cmd_vel.angular.z = -0.8;}
6. 完成判断
我们在前视点到达规划路径的最后一个时,且当前点与该最后一点距离差小于预设的容忍差,强制输出0速度
if (got && l < GOAL_TOERANCE_XY) {goal_reached_ = true;cmd_vel.angular.z = 0;cmd_vel.linear.x = 0;}
7. 测试
- 修改
move_base配置文件move_base_params.yaml
# base_local_planner: "dwa_local_planner/DWAPlannerROS"
base_local_planner: pure_pursuit_local_planner/PurepursuitPlanner
dwa_local_planner/DWAPlannerROS—>pure_pursuit_local_planner/PurepursuitPlanner
- 启动模拟器
pibot_simulator
- 启动rviz
pibot_view

相关文章:
49.在ROS中实现local planner(2)- 实现Purepersuit(纯跟踪)算法
48.在ROS中实现local planner(1)- 实现一个可以用的模板实现了一个模板,接下来我们将实现一个简单的纯跟踪控制,也就是沿着固定的路径运动,全局规划已经规划出路径点,基于该路径输出相应的控制速度 1. Pur…...
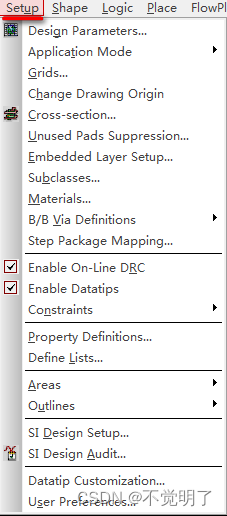
Allegro如何设通孔Pin和Via的消盘操作指导
Allegro如何设通孔Pin和Via的消盘操作指导 用Allegro做PCB设计的时候,除了可以在光绘设置里面设置内层通孔Pin和Via的消盘,在设计过程中,同样也可以设置消盘效果,以便实时显示,如下图 如何设置,具体操作如下 点击Setup点击Unused Pads Suppression...
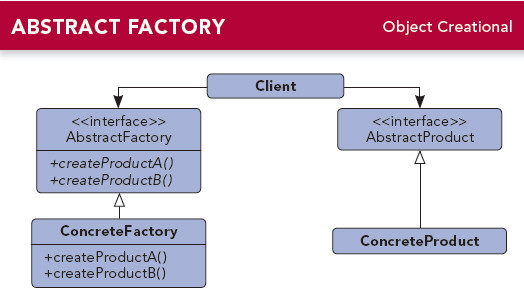
Android工厂模式
工厂模式分为三种 :简单工厂模式 、工厂方法模式 、抽象工厂模式 。 目录 简单工厂模式 UML图 实现 使用场景: 优点 : 缺点: 工厂方法模式 UML图 实现 使用场景: 优点: 缺点: 抽象工厂模式 UM…...

神经网络硬件加速器-架构篇
架构设计 常规架构通常包括两种: 1、全流水线架构,顾名思义,将整个神经网络进行平铺,并对每一层进行优化设计,优点:实现高吞吐率和低延时。缺点:消耗大量硬件资源,通常无法跨网络或…...
)
Python raise用法(超级详细,看了无师自通)
是否可以在程序的指定位置手动抛出一个异常?答案是肯定的,Python 允许我们在程序中手动设置异常,使用 raise 语句即可。 大家可能会感到疑惑,即我们从来都是想方设法地让程序正常运行,为什么还要手动设置异常呢&#…...
1.SpringSecurity快速入门
*SpringScurity的核心功能: 认证:验证当前访问系统的是不是本系统的用户,并且要确认具体是哪个用户 授权:经过认证后判断当前用户是否有权限进行某个操作 *第一步:创建springboot工程 *第二步:引入SpringSecurity依赖 *第三步:写controller,访问对应的url:localhos…...
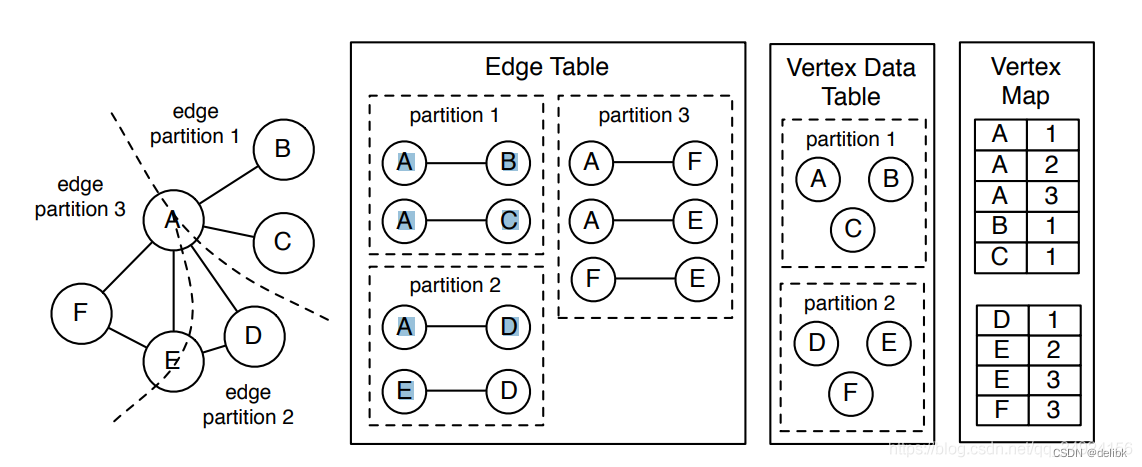
Graph Partition: Edge cut and Vertex cut
Graph PartitionEdge cut and Vertex cutEdge cutVertex cut实际如何进行点分割和边分割的呢?Graph store format情况1:按照边列表存储:情况2:按照邻接表存储:Edge cut and Vertex cut 图结构描述了数据流动ÿ…...

Javascript周学习小结(初识,变量,数据类型)
JS的三大书写方式行内式如图所示:几点说明:JS的行内式写在HTML的标签内部,(常以on开头),如onclick行内式常常使用单引号括住字符串以区分HTML的双引号可读性差,不建议使用引号易出错,不建议使用特殊情况下使…...
C语言-基础了解-10-C函数
C函数 一、C函数 函数是一组一起执行一个任务的语句。每个 C 程序都至少有一个函数,即主函数 main() ,所有简单的程序都可以定义其他额外的函数。 您可以把代码划分到不同的函数中。如何划分代码到不同的函数中是由您来决定的,但在逻辑上&…...
【LeetCode】剑指 Offer(16)
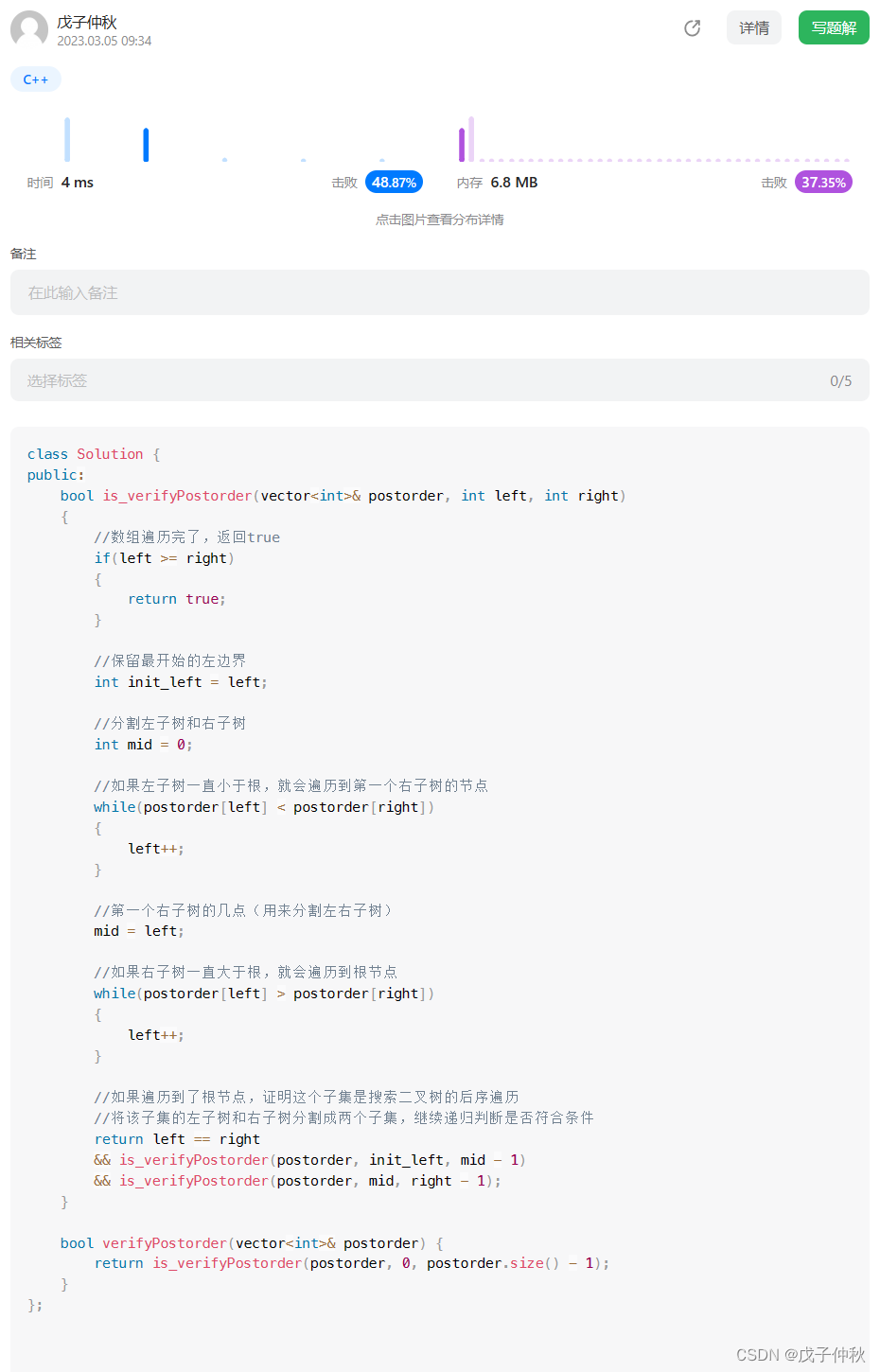
目录 题目:剑指 Offer 33. 二叉搜索树的后序遍历序列 - 力扣(Leetcode) 题目的接口: 解题思路: 代码: 过啦!!! 写在最后: 题目:剑指 Offer …...
)
第三十九章 linux-并发解决方法二(互斥锁mutex)
第三十九章 linux-并发解决方法二(互斥锁mutex) 文章目录第三十九章 linux-并发解决方法二(互斥锁mutex)互斥锁的定义与初始化互斥锁的DOWN操作互斥锁的UP操作用count1的信号量实现的互斥方法还不是Linux下经典的用法,…...

脚本方式本地仓库jar包批量导入maven私服
脚本内容,将以下内容保存为mavenimport.sh,放置于需要上传的目录下,可以是顶层目录,或者某个分包的目录,若私服已有待上传的包,则执行会被替换 #!/bin/bash # copy and run this script to the root of th…...

【c++】引用的学习
引用的定义和声明 引用是一种别名,它允许使用与原变量相同的内存位置。在C中,引用是使用&符号来定义的。引用必须在定义时初始化,并且可以与原变量分别使用。 int a 10; int& b a; // 定义了一个引用b,它指向a引用的作用…...

linux 软件安装及卸载
1.联网在线安装及卸载ubuntu环境下:使用apt-get 工具apt-get install - 安装软件包apt-get remove - 移除(卸载)软件包CentOS环境下:使用yum工具 (银河麒麟系统属于centos)yum install - 安装软件包yum rem…...
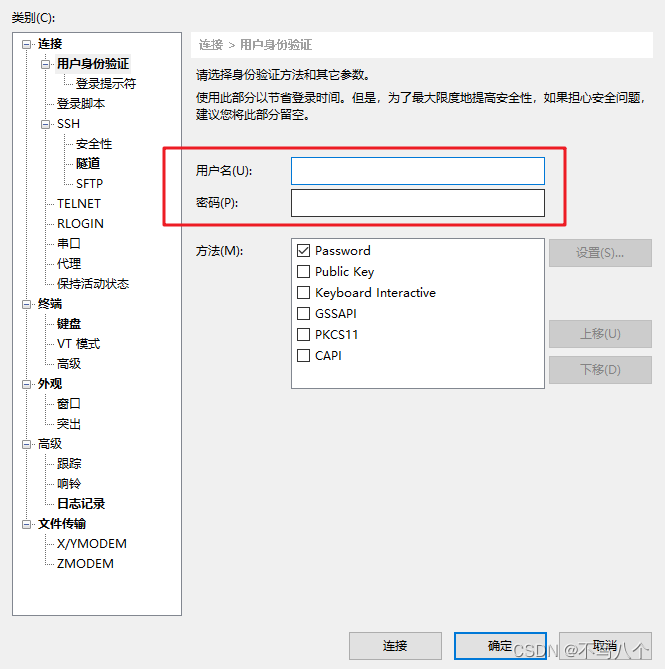
XShell连接ubuntu20.04.LTS
1 下载XshellXShell官方下载地址打开XSHELL官方下载地址,我们可以选择【家庭和学校用户的免费许可证】,输入邮箱之后即可获得下载链接安装非常简单,跟着提示进行即可。2 连接ubuntu2.1 查看ubuntu的ip地址输入命令查看ip地址ifconfig刚开始可…...

【FPGA】Verilog:MSI/LSI 组合电路之解码器 | 多路分解器
写在前面:本章将理解编码器与解码器、多路复用器与多路分解器的概念,通过使用 Verilog 实现多样的解码器与多路分解器,通过 FPGA 并使用 Verilog 实现。 Ⅰ. 前置知识 0x00 解码器与编码器(Decoder / Encoder) 解码器…...

深入理解JDK动态代理原理,使用javassist动手写一个动态代理框架
文章目录一、动手实现一个动态代理框架1、初识javassist2、使用javassist实现一个动态代理框架二、JDK动态代理1、编码实现2、基本原理(1)getProxyClass0方法(2)总结写在后面一、动手实现一个动态代理框架 1、初识javassist Jav…...
一、策略模式的使用
1、策略模式定义: 策略模式(Strategy Pattern)定义了一组策略,分别在不同类中封装起来,每种策略都可以根据当前场景相互替换,从而使策略的变化可以独立于操作者。比如我们要去某个地方,会根据距…...

Verilog使用always块实现时序逻辑
这篇文章将讨论 verilog 中一个重要的结构---- always 块(always block)。verilog 中可以实现的数字电路主要分为两类----组合逻辑电路和时序逻辑电路。与组合逻辑电路相反,时序电路电路使用时钟并一定需要触发器等存储元件。因此,…...
面向对象设计模式:行为型模式之迭代器模式
一、迭代器模式,Iterator Pattern aka:Cursor Pattern 1.1 Intent 意图 Provide a way to access the elements of an aggregate object sequentially without exposing its underlying representation. 提供一种按顺序访问聚合对象的元素而不公开其基…...

打破平台壁垒:Windows上安装APK文件的完整解决方案
打破平台壁垒:Windows上安装APK文件的完整解决方案 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾想过在Windows电脑上直接运行安卓应用ÿ…...

【ZYNQ】AXI4总线协议实战:从握手时序到PS-PL高效通信
1. AXI4总线协议基础:从握手信号到通道架构 第一次接触ZYNQ的PS-PL通信时,我被AXI4协议里那些VALID/READY信号搞得头晕眼花。直到在示波器上抓到真实的握手波形,才突然理解这个看似复杂的协议其实像极了我们日常的对话机制——只有当说话方准…...

Solidworks PDM二次开发实战:文件夹权限与数据卡配置详解
1. Solidworks PDM二次开发入门指南 如果你正在使用Solidworks PDM管理产品数据,可能会遇到需要批量创建文件夹并设置权限的场景。比如新项目启动时,需要为不同部门创建标准化的文件夹结构,同时设置工程师只读、管理员完全控制的权限规则。手…...

NS-USBLoader终极指南:3步搞定Switch游戏管理与RCM注入的完整教程
NS-USBLoader终极指南:3步搞定Switch游戏管理与RCM注入的完整教程 【免费下载链接】ns-usbloader Awoo Installer and GoldLeaf uploader of the NSPs (and other files), RCM payload injector, application for split/merge files. 项目地址: https://gitcode.c…...

框架式幕墙与单元式幕墙的价格差异
框架式幕墙与单元式幕墙的价格差异 框架式幕墙与单元式幕墙由于结构及安装方式的不同,在价格方面存着很大的差异。主要表现在以下几个方面: 铝型材的用量: 框架式幕墙铝型材用量一般在7—9 kg/平方米左右。 单元式幕墙铝型材用量一般在13—15kg/平方米左右。 两者每平方…...

UVa 366 Cutting Up
题目描述 拼布者经常需要将布料切割成 111 \times 111 的小正方形。他们有一种特殊工具(旋转切割刀),可以一次切割多层布料,切割层数的上限由布料类型决定(题目输入的第一个参数 KKK)。切割时,无…...

CircuitPython状态灯、安全模式与文件系统故障排查实战指南
1. 项目概述与核心价值 如果你正在用CircuitPython做项目,无论是物联网传感器节点、智能穿戴设备还是互动艺术装置,大概率都遇到过这样的瞬间:板子上的RGB状态灯突然开始闪烁诡异的颜色,或者电脑上那个熟悉的 CIRCUITPY U盘图标…...

Onekey:重构Steam Depot清单下载流程的现代化解决方案
Onekey:重构Steam Depot清单下载流程的现代化解决方案 【免费下载链接】Onekey Onekey Steam Depot Manifest Downloader 项目地址: https://gitcode.com/gh_mirrors/one/Onekey Onekey作为一款专为Steam Depot清单设计的自动化下载工具,通过其创…...

Vim-ai插件深度指南:在Vim中无缝集成AI提升开发效率
1. 项目概述:当Vim遇上AI,一场编辑器生产力的革命如果你和我一样,是个在终端里泡了十多年的老Vim用户,那你一定经历过这样的场景:面对一个复杂的函数重构,手指在键盘上飞舞,:s、%s、宏录制轮番上…...

树莓派+Kali Linux+PiTFT打造便携式安全测试平台全攻略
1. 项目概述如果你和我一样,对网络安全和嵌入式硬件都抱有浓厚的兴趣,那么将Kali Linux与树莓派结合,再配上一块小巧的触摸屏,绝对是一个能让你兴奋起来的项目。这不仅仅是把两个热门技术拼在一起,更是打造一个真正便携…...