STC89C52串口通信详解
目录
前言
一.通信基本原理
1.1串行通信与并行通信
1.2同步通信和异步通信
1.2.1异步通信
1.2.2同步通信
1.3单工、半双工与全双工通信
1.4通信速率
二.串口通信简介
2.1接口标准
2.2串口内部结构
2.3串口相关寄存器
三.串口工作方式
四.波特率计算
五.串口初始化步骤
六.实验程序
前言
详细图解,同步和异步通信原理,单片机串口,通信速率计算,串口寄存器与工作方式
一.通信基本原理
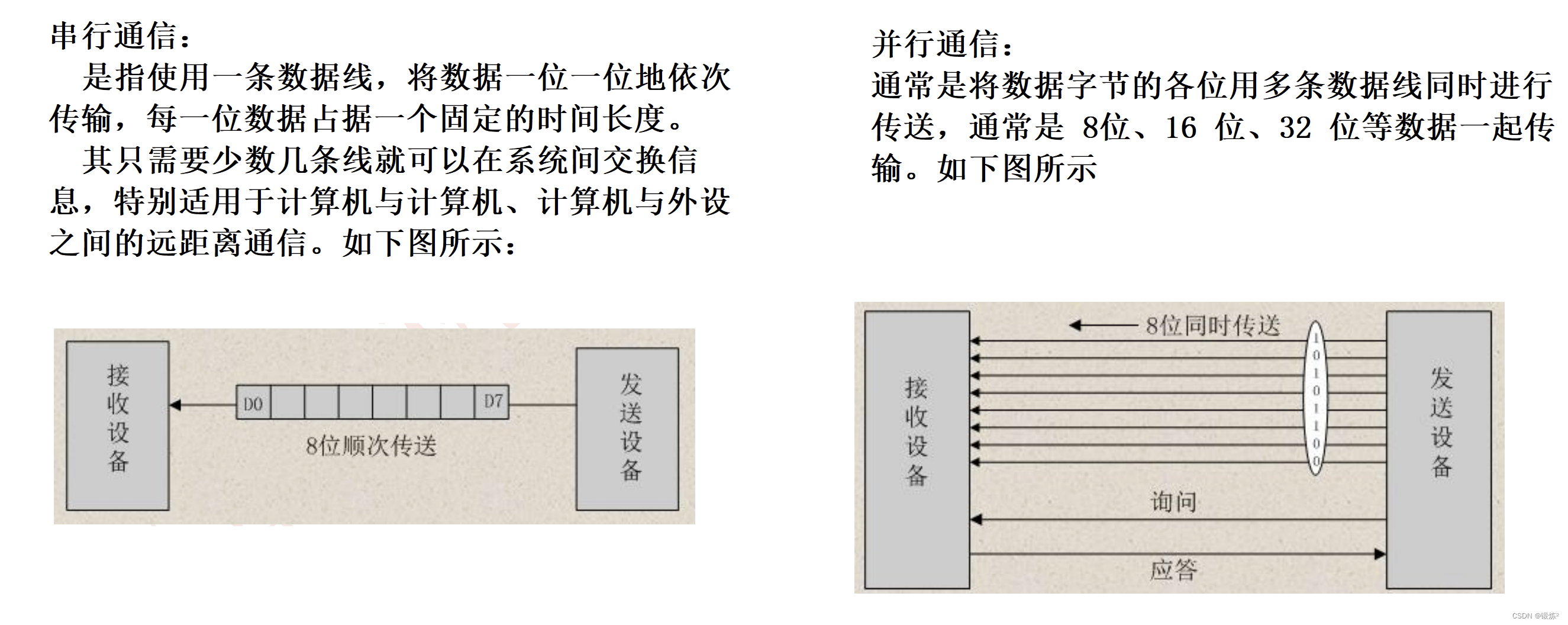
1.1串行通信与并行通信
串行通信:是指使用一条数据线,将数据一位一位地依次传输。
串行通信的特点:传输线少,长距离传送时成本低,且可以利用电话网等现 成的设备,但数据的传送控制比并行通信复杂。
并行通信:通常是将数据字节的各位用多条数据线同时进行传送。
并行通信的特点:控制简单、传输速度快;由于传输线较多,长距离传送时成本高且接收方的各位同时接收存在困难,抗干扰能力差。
1.2同步通信和异步通信
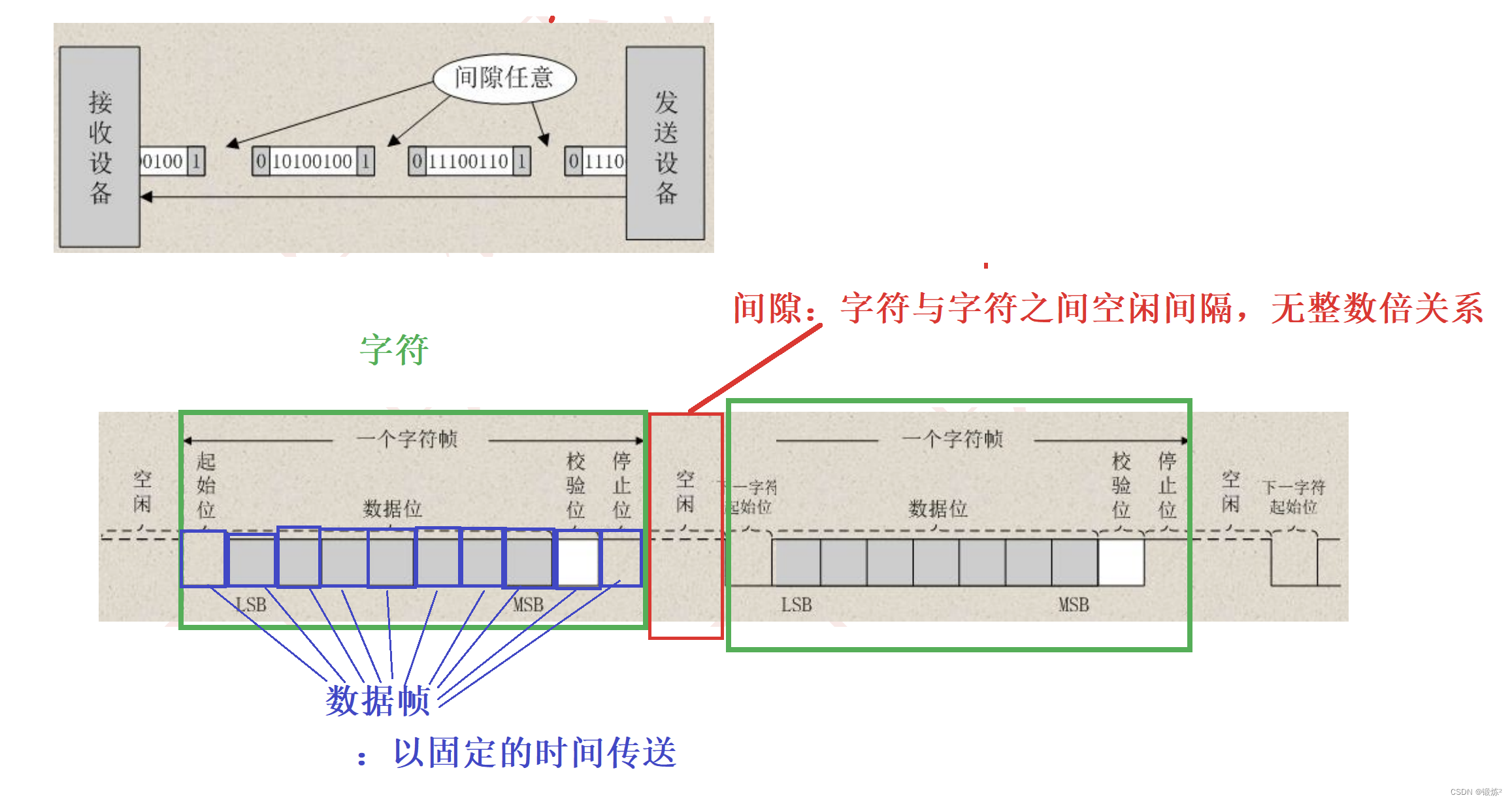
1.2.1异步通信
异步通信:发送和接收设备的时钟尽可能一致。以字符(构成的帧)为单位进行传输,字符与字符之间的间隙(时间间隔)是任意的,但每个字符中的各位是以固定的时间传送的。
异步通信的特点:不要求收发双方时钟的严格一致,实现容易,设备开销较小,但每个字符要附加 2~3 位用于起止位,各帧之间还有间隔,因此传输效率不高。
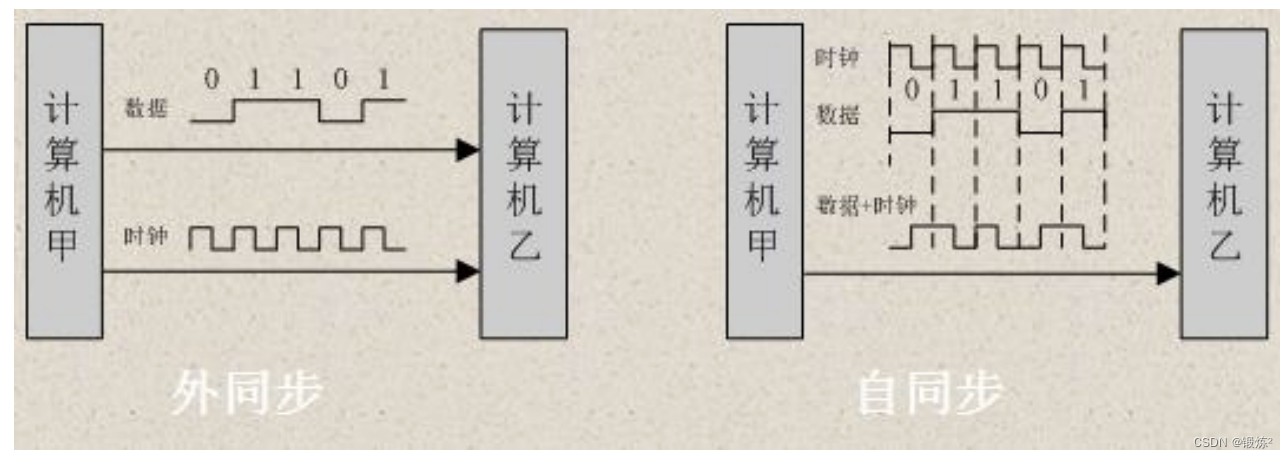
1.2.2同步通信
同步通信时要建立发送方时钟对接收方时钟的直接控制,使双方达到完全同步。此时,传输数据的位之间的距离均为“位间隔”的整数倍,同时传送的字符 间不留间隙,即保持位同步关系,也保持字符同步关系。发送方对接收方的同步可以通过两种方法实现。如下图所示
1.3单工、半双工与全双工通信

1.4通信速率
波特率和比特率是衡量通信传输速率的两个不同的参数,它们之间有着明确的区别。具体如下:
- 波特率:指的是每秒钟传送的信号变化次数,也称为传码率,单位是波特(Baud)。波特率决定了信息传输的速度和可靠性。在电子通信领域,波特即调制速率,指的是有效数据信号调制载波的速率,即单位时间内载波调制状态变化的次数。
- 比特率:表示的是每秒钟传输的二进制的位数,单位为bit/s。比特率是每秒钟传送的比特数量,又称为传信率。
此外,在某些情况下,如果每个信号符号只编码1比特的数据,那么比特率和波特率是相等的。例如,基础的二进制通信,其中每个信号变化(例如从高到低或从低到高)都表示一个比特。而在高阶调制中,如QPSK、16-QAM等,一个信号符号可能代表2比特、4比特或更多,这时比特率会大于波特率。这种情况比较少见,但在某些冗余编码或特定的编码方法中,可能需要多个信号变化来表示一个比特,从而导致比特率小于波特率。
衡量通信性能的一个非常重要的参数就是通信速率,通常以比特率(Bitrate)来表示。比特率是每秒钟传输二进制代码的位数,单位是:位/秒( bps)。如 每秒钟传送 240 个字符,而每个字符格式包含 10 位(1 个起始位、1 个停止位、 8 个数据位),
这时的比特率为: 10 位×240 个/秒 = 2400 bps
在后面会遇到一个“波特率”的概念,它表示每秒钟传输了多少个码元。而 码元是通信信号调制的概念,通信中常用时间间隔相同的符号来表示一个二进制 数字,这样的信号称为码元。如常见的通信传输中,用 0V 表示数字 0,5V 表 示数字 1,那么一个码元可以表示两种状态 0 和 1,所以一个码元等于一个二 进制比特位,此时波特率的大小与比特率一致;如果在通信传输中,有 0V、 2V、 4V 以及 6V 分别表示二进制数 00、 01、 10、 11,那么每个码元可以表示四 种状态,即两个二进制比特位,所以码元数是二进制比特位数的一半,这个时候 的波特率为比特率的一半。由于很多常见的通信中一个码元都是表示两种状态, 所以我们常常直接以波特率来表示比特率。
二.串口通信简介
串口通信(Serial Communication),是指外设和计算机间通过数据信号线、 地线等按位进行传输数据的一种通信方式,属于串行通信方式。串口是一种接口 标准,它规定了接口的电气标准,没有规定接口插件电缆以及使用的协议。
2.1接口标准
串口通信的接口标准有很多,有 RS-232C、 RS-232、 RS-422A、 RS-485 等。 常用的是 RS-232 和 RS-485。RS-232 其实是 RS-232C 的改进,原理是一样的。 这里我们就以 RS-232C 接口进行讲解
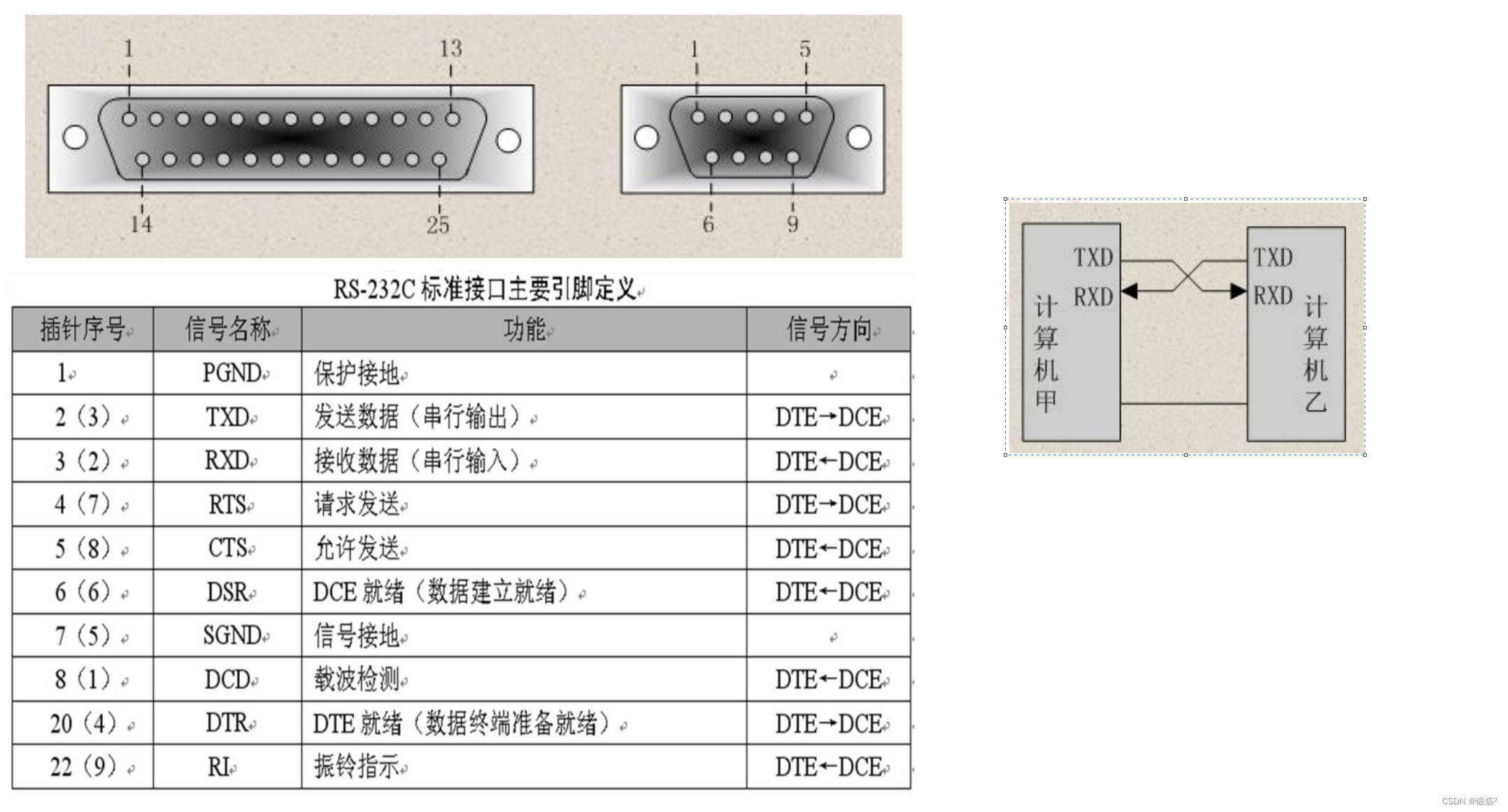
RS-232C 是 EIA(美国电子工业协会)1969 年修订 RS-232C 标准。RS-232C 定义了数据终端设备(DTE)与数据通信设备(DCE)之间的物理接口标准。
RS-232C 接口规定使用 25 针连接器,简称 DB25,连接器的尺寸及每个插 针的排列位置都有明确的定义,如下图所示
2.2串口内部结构
TXD 和 RXD 为单片机 IO 口,TXD 对应的是 P3.1 管脚,RXD 对 应的是 P3.0 管脚。

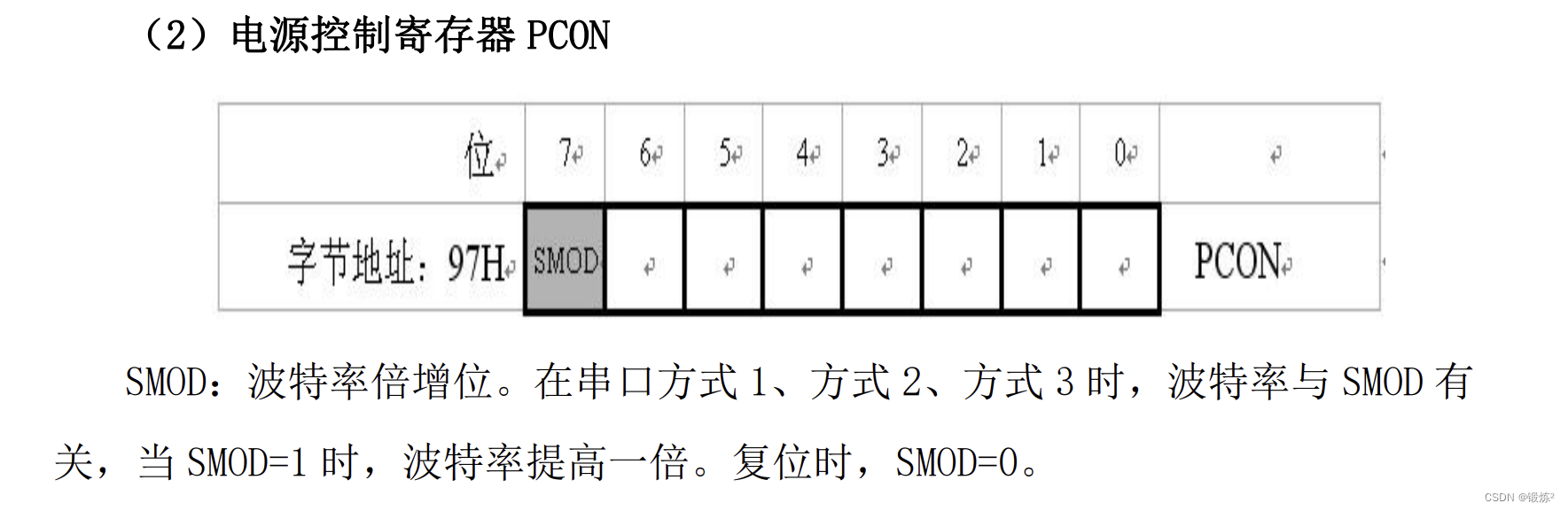
2.3串口相关寄存器
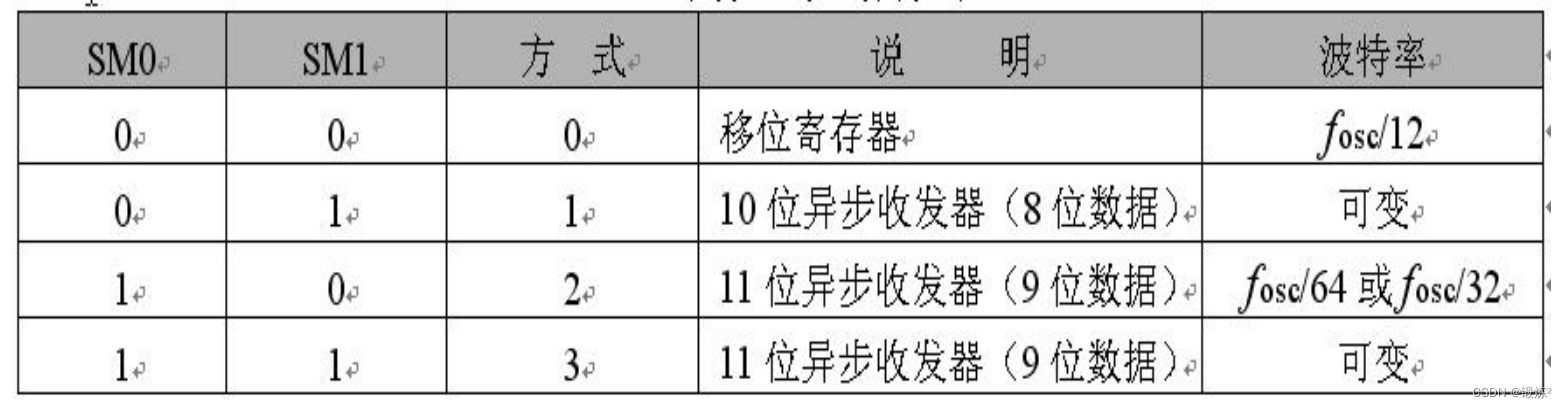
SM0 和 SM1为工作方式选择位:
SM2:多机通信控制位,主要用于方式 2 和方式 3。当 SM2=1 时可以利用收到 的 RB8 来控制是否激活 RI(RB8=0 时不激活 RI,收到的信息丢弃;RB8=1 时收 到的数据进入 SBUF,并激活 RI,进而在中断服务中将数据从 SBUF 读走)。当 SM2=0 时,不论收到的 RB8 为 0 和 1,均可以使收到的数据进入 SBUF,并激活 RI (即此时 RB8 不具有控制 RI 激活的功能)。通过控制 SM2,可以实现多机通信。
REN:允许串行接收位。由软件置 REN=1,则启动串行口接收数据;若软件置 REN=0,则禁止接收。
TB8:在方式 2 或方式 3 中,是发送数据的第 9 位,可以用软件规定其作用。 可以用作数据的奇偶校验位,或在多机通信中,作为地址帧/数据帧的标志位。 在方式 0 和方式 1 中,该位未用到。
RB8:在方式 2 或方式 3 中,是接收到数据的第 9 位,作为奇偶校验位或地 址帧/数据帧的标志位。在方式 1 时,若 SM2=0,则 RB8 是接收到的停止位。
TI:发送中断标志位。在方式 0 时,当串行发送第 8 位数据结束时,或在其 它方式,串行发送停止位的开始时,由内部硬件使 TI 置 1,向 CPU 发中断申请。 在中断服务程序中,必须用软件将其清 0,取消此中断申请。
RI:接收中断标志位。在方式 0 时,当串行接收第 8 位数据结束时,或在其 它方式,串行接收停止位的中间时,由内部硬件使 RI 置 1,向 CPU 发中断申请。 也必须在中断服务程序中,用软件将其清 0,取消此中断申请

三.串口工作方式
以上有4种工作模式,接下来使用方式1接下介绍
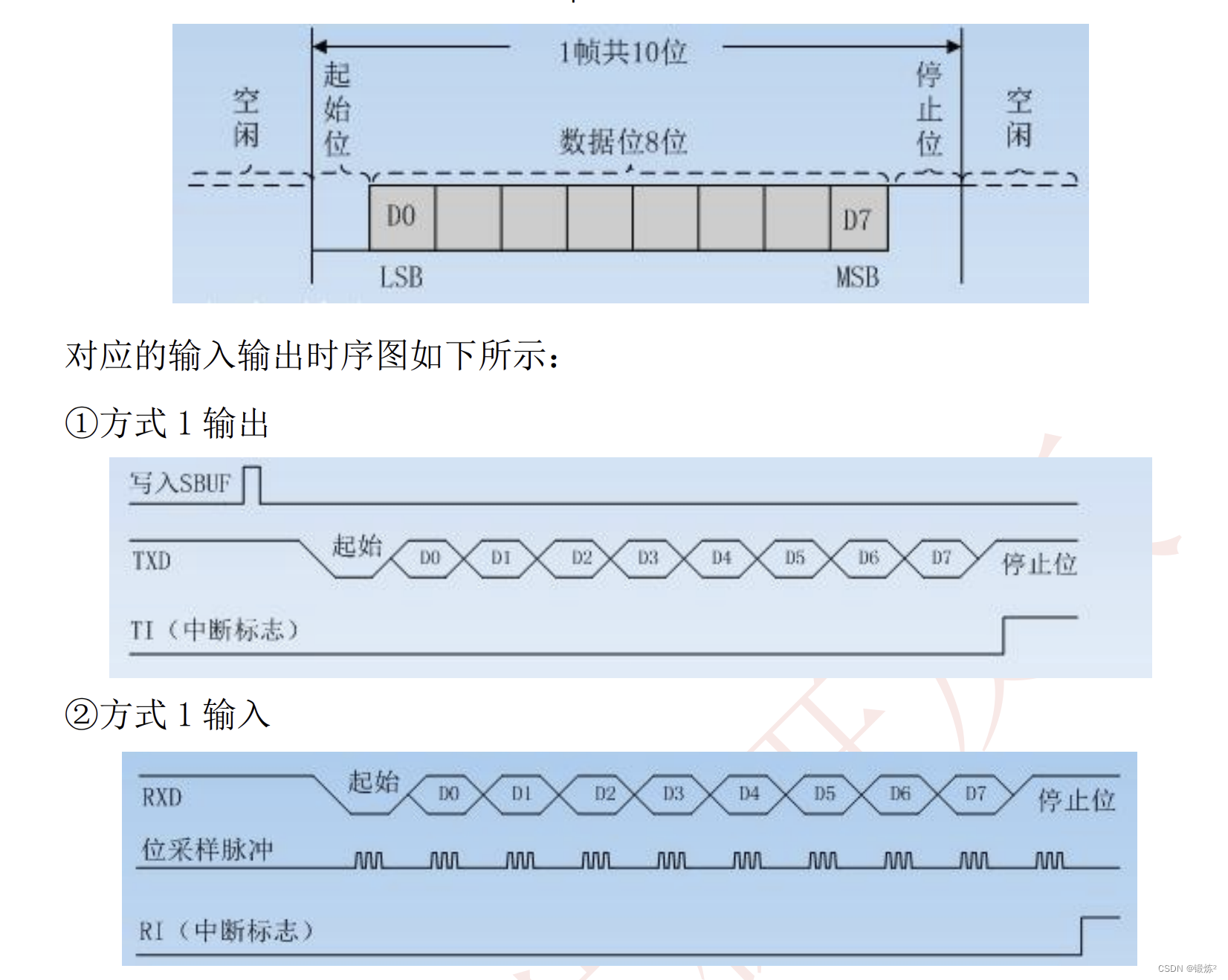
方式 1 是 10 位数据的异步通信口。TXD 为数据发送引脚,RXD 为数据接收引 脚,传送一帧数据的格式如下所示。其中 1 位起始位,8 位数据位,1 位停止位
用软件置 REN 为 1 时,接收器以所选择波特率的 16 倍速率采样 RXD 引脚电 平,检测到 RXD 引脚输入电平发生负跳变时,则说明起始位有效,将其移入输入 移位寄存器,并开始接收这一帧信息的其余位。接收过程中,数据从输入移位寄 存器右边移入,起始位移至输入移位寄存器最左边时,控制电路进行最后一次移 位。当 RI=0,且 SM2=0(或接收到的停止位为 1)时,将接收到的 9 位数据的前 8 位数据装入接收 SBUF,第 9 位(停止位)进入 RB8,并置 RI=1,向 CPU 请求中断
四.波特率计算
要计算STC89C52单片机的波特率,
可以采用以下公式: 波特率 = 定时器时钟频率 / (12 * (计数器初值 + 1))。
具体步骤如下:
- 确定晶振频率:需要知道STC89C52单片机使用的晶振频率。这是计算波特率的起点,因为定时器的时钟频率通常基于晶振频率。
- 计算定时器时钟频率:定时器时钟频率通常是晶振频率的1/12。例如,如果晶振频率是11.0592MHz,那么定时器时钟频率为921.6kHz。
- 设置SMOD位:SMOD是串口模式选择位,它会影响波特率的计算。SMOD位为0时,波特率误差较大;SMOD位为1时,波特率误差较小。这个设置在串口控制寄存器SCON中。
- 计算计数器初值:计数器初值是根据所需波特率和定时器时钟频率来计算的。计算公式为:计数器初值 = 65536 - (定时器时钟频率 / (12 * 波特率))。
- 设置定时器:根据计算出的计数器初值设置定时器1(TH1和TL1)。定时器1将被用作波特率发生器。
- 考虑波特率加倍:如果使用了波特率加倍功能,计算方法会有所不同。在这种情况下,公式变为:TH1 = TL1 = 256 - 晶振值/12/16/波特率。
- 编写初始化代码:根据上述设置,编写串口初始化代码,包括设置SCON、TMOD和TH1、TL1的值。
以下列出了几种方式下波特率的计算公式:
方式 0 的波特率 = fosc/12
方式 2 的波特率 =(2 SMOD/64)· fosc
方式 1 的波特率 =(2 SMOD/32)·(T1 溢出率)
方式 3 的波特率 =(2 SMOD/32)·(T1 溢出率)
其中 T1 溢出率 = fosc /{12×[256 -(TH1)]}
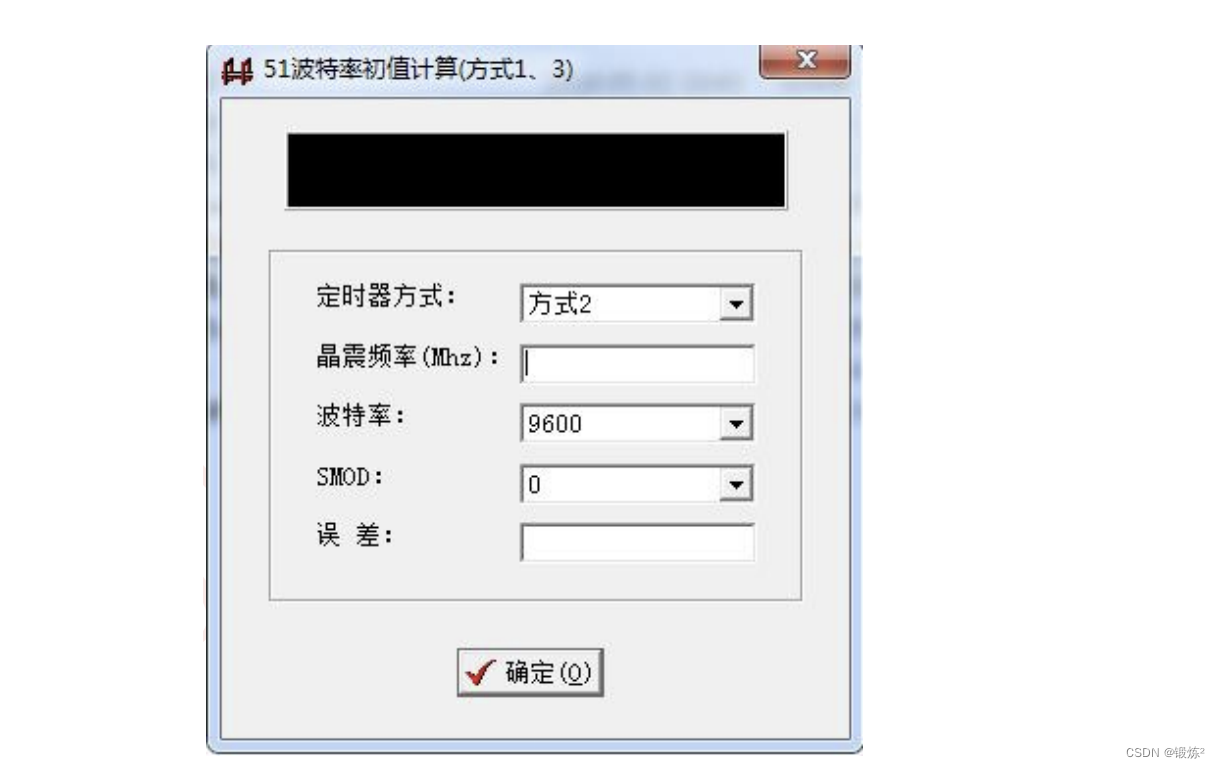
或者直接使用普中的软件进行波特率计算,这样更快
五.串口初始化步骤
我们使用定时器寄存器和串口寄存器

六.实验程序
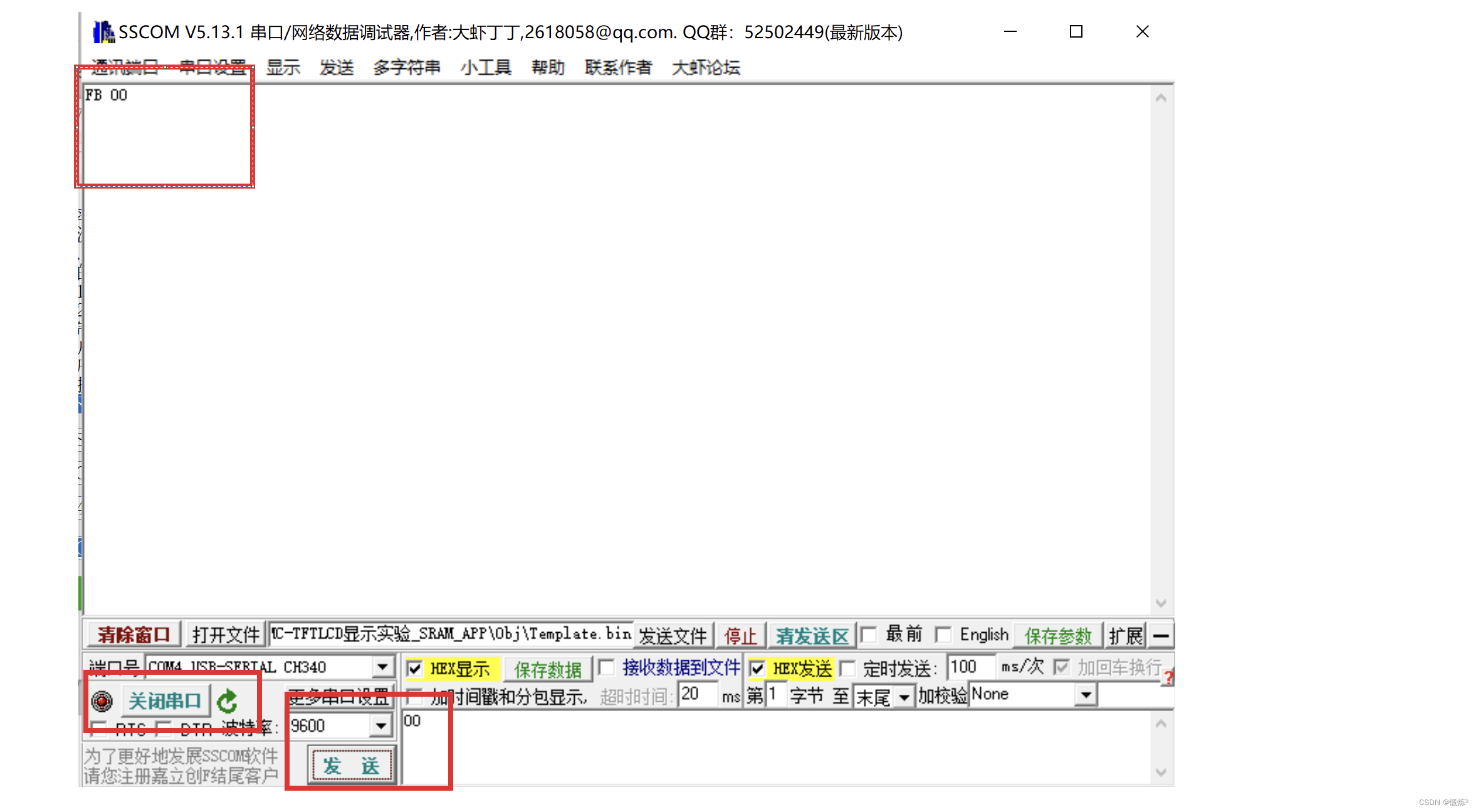
我们通过串口助手输入两个16位的数字可实现控制P2端的LED灯的亮灭
例如:FE
#include "reg52.h"typedef unsigned int u16; //对系统默认数据类型进行重定义 typedef unsigned char u8;#define LED P2/******************************************************************************* * 函 数 名 : uart_init * 函数功能 : 串口通信中断配置函数,通过设置TH和TL即可确定定时时间 * 输 入 : baud:波特率对应的TH、TL装载值 * 输 出 : 无 *******************************************************************************/ void uart_init(u8 baud) {TMOD|=0X20; //设置计数器工作方式2SCON=0X50; //设置为工作方式1PCON=0X80; //波特率加倍TH1=baud; //计数器初始值设置TL1=baud;ES=1; //打开接收中断EA=1; //打开总中断TR1=1; //打开计数器 }/******************************************************************************* * 函 数 名 : main * 函数功能 : 主函数 * 输 入 : 无 * 输 出 : 无 *******************************************************************************/ void main() { uart_init(0XFA);//波特率为9600while(1){ } }void uart() interrupt 4 //串口通信中断函数 {u8 rec_data;RI = 0; //清除接收中断标志位rec_data=SBUF; //存储接收到的数据LED = rec_data; //通过串口传入的数据,控制连接P2端的LED灯亮灭SBUF=rec_data; //将接收到的数据放入到发送寄存器while(!TI); //等待发送数据完成TI=0; //清除发送完成标志位 }
注意:我们使用串口助手时,
需要了解自己芯片的晶振频率:如11.0592MHZ或12MHZ
计算波特率:这里是9600
还要开启串口,才能发送数据
以上就是本期补齐的内容,欢迎参考指正,如有不懂,欢迎评论或私信出下期!!!
相关文章:
STC89C52串口通信详解
目录 前言 一.通信基本原理 1.1串行通信与并行通信 1.2同步通信和异步通信 1.2.1异步通信 1.2.2同步通信 1.3单工、半双工与全双工通信 1.4通信速率 二.串口通信简介 2.1接口标准 2.2串口内部结构 2.3串口相关寄存器 三.串口工作方式 四.波特率计算 五.串口初始化步骤 六.实验…...

基础算法|线性结构|前缀和学习
参考文章: https://blog.csdn.net/weixin_72060925/article/details/127835303 二维数组的前缀和练习: 这里要注意的地方就是求子矩阵和的时候,这里要减去的是x1-1,y1-1的部分,因为所求的目标值是包括边界的 //前缀…...
设计模式之模版方法实践
模版方法实践案例 实践之前还是先了解一下模版方法的定义 定义 模板方法模式是一种行为设计模式,它定义了一个骨架,并允许子类在不改变结构的情况下重写的特定步骤。模板方法模式通过在父类中定义一个模板方法,其中包含了主要步骤…...

sql中COALESCE函数详解
在SQL中,COALESCE函数是一个非常有用的函数,用于从其参数列表中返回第一个非NULL值。如果所有给定的参数都是NULL,那么COALESCE函数将返回NULL。这个函数可以接受多个参数,使其在处理可能出现的NULL值时非常灵活和强大。 语法 C…...

rust-analyzer报错“Failed to spawn one or more proc-macro servers,....“怎么解决?
最近,在使用vscode测试rust代码时,遇到了一些问题。在经过反复折腾后,最终解决了问题,在此写下作为记录,以便于以后参考。 我遇到的报错内容是: Failed to spawn one or more proc-macro servers. cannot find proc-macro-srv, the workspace E:\100rust\temp is missin…...

Communications--9--一文读懂双机热备冗余原理
1、热备冗余管理 2、主备系状态判断 3、如何从冷备做到热备? 参见: 用软件实现热备冗余信号系统的安全切换...

可调恒定电流稳压器NSI50150ADT4G车规级LED驱动器 提供专业的汽车级照明解决方案
NSI50150ADT4G产品概述: NSI50150ADT4G可调恒定电流稳压器 (CCR) ,是一款简单、经济和耐用的器件,适用于为 LED 中的调节电流提供成本高效的方案(与恒定电流二极管 CCD 类似)。该 (CCR) 基于自偏置晶体管 (SBT) 技术&…...

Unity中使用代码动态修改URP管线下的标准材质是否透明
//修改为透明 material.SetFloat("_Surface",1.0f); material.SetInt("_SrcBlend", (int)UnityEngine.Rendering.BlendMode.One); material.SetInt("_DstBlend", (int)UnityEngine.Rendering.BlendMode.OneMinusSrcAlpha); material.Set…...
关于制作Python游戏全过程(汇总1)
目录 前言: 1.plane_sprites模块: 1.1导入模块: 1.1.1pygame:一个用于创建游戏的Python库。 1.1.2random:Python标准库中的一个模块,用于生成随机数。 1.2定义事件代号: 1.2.1ENEMY_EVENT:自定义的敌机出场事件代号…...

独立站营销新纪元:AI与大数据塑造个性化体验的未来
随着全球互联网的深入发展和数字化转型的不断推进,作为品牌建设和市场营销的重要载体,独立站将迎来新的发展机遇。新技术的涌现,特别是人工智能和大数据等技术的广泛应用,为独立站带来了前所未有的机遇与挑战。本文Nox聚星将和大家…...
C语言项目实战——贪吃蛇
C语言实现贪吃蛇 前言一、 游戏背景二、游戏效果演示三、课程目标四、项目定位五、技术要点六、Win32 API介绍6.1 Win32 API6.2 控制台程序6.3 控制台屏幕上的坐标COORD6.4 GetStdHandle6.5 GetConsoleCursorInfo6.5.1 CONSOLE_CURSOR_INFO 6.6 SetConsoleCursorInfo6.7 SetCon…...
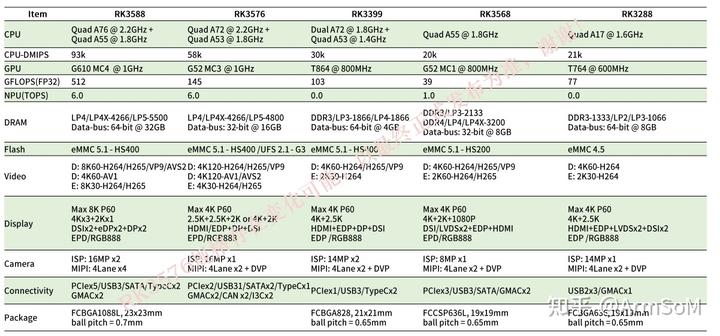
ArmSoM规划开发基于RK3576的开发套件
ArmSoM正计划推出一款新的产品,这款产品将采用强大的RK3576芯片。 本文将为您介绍我们的新产品搭载的RK3576性能参数,以及它如何为您提供卓越的性能和功能。 RK3576处理器 RK3576处理器是一款强大的处理器,具备出色的性能和多样化的功能&a…...
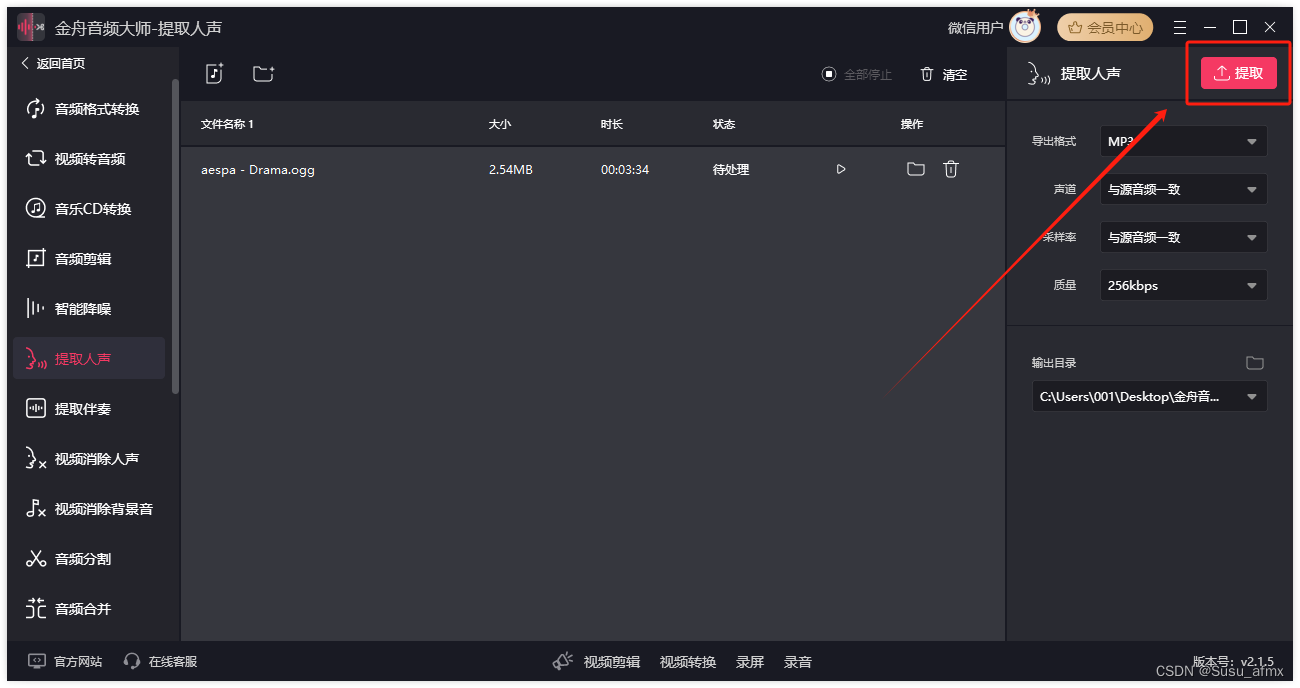
视频剪辑如何提取伴奏?短视频剪辑有妙方
在多媒体处理中,音频的编辑和处理是不可或缺的一部分。很多时候,我们可能想要从一段视频或音频中提取伴奏,或者实现人声的分离,以便于进一步制作或混音。以下,将为您介绍一种简单而有效的方法来实现这一目标。 一、提取…...
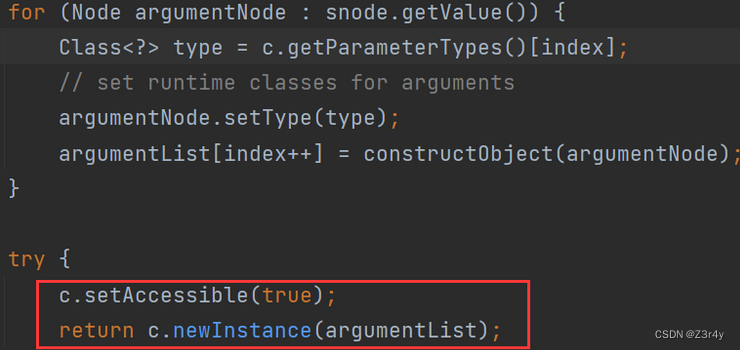
【Web】浅浅地聊SnakeYaml反序列化两条常见利用链
目录 关于Yaml 关于SnakeYaml SnakeYaml反序列化利用 JdbcRowSetImpl链 ScriptEngineManager链 复现 基本原理 继续深入 关于Yaml 学过SpringBoot开发的师傅都知道,YAML和 Properties 文件都是常见的配置文件格式,用于存储键值对数据。 这里举…...

详解openGauss客户端工具gsql的高级用法
前言: gsql是openGauss提供在命令行下运行的数据库连接工具,可以通过此工具连接服务器并对其进行操作和维护,除了具备操作数据库的基本功能,gsql还提供了若干高级特性,便于用户使用。 gsql的基本功能 连接数据库&…...
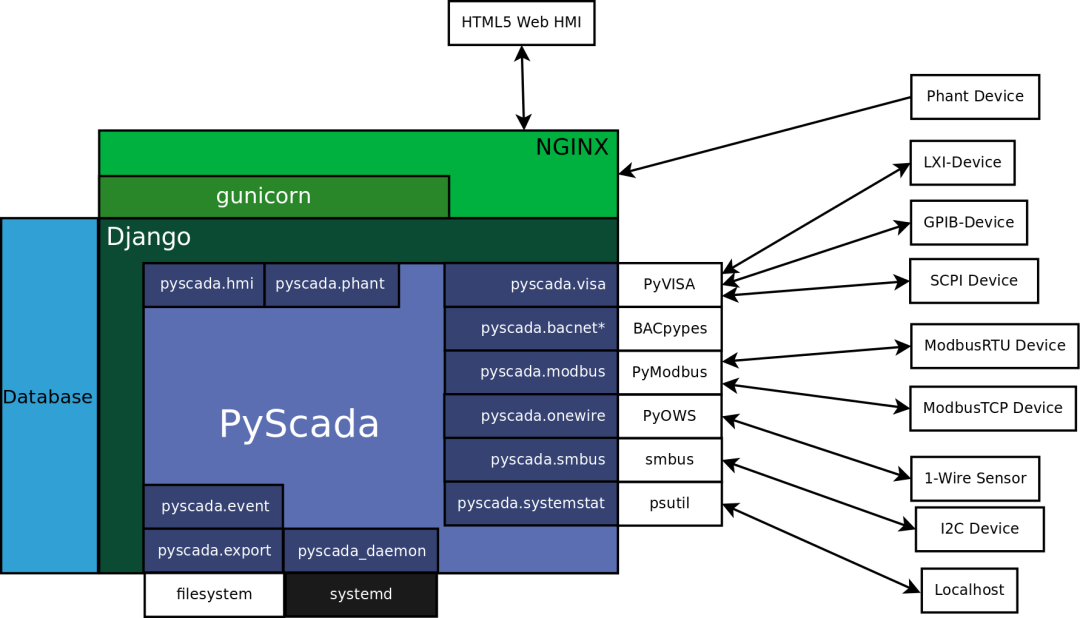
开源工业软件:SCADA系统开源
PyScada是一个开源的scada系统 源代码地址 http://www.gitpp.com/huangtomy/pyscada-cn SCADA系统是Supervisory Control And Data Acquisition的缩写,即数据采集与监视控制系统。它是以计算机为基础的DCS与电力自动化监控系统,应用领域非常广&#x…...

关于AI彩票预测算法的设想
本文以双色球选择红色6个号码为例 我们先把问题简化,双色球红色号码一共有33个球。摇奖时,每次随机摇出来一个号码,连续6次,就随机出来了6个红色球号码。 而这6个号码就是一注彩票里的前6个红色球号码。这里不讨论一注彩票里后端…...
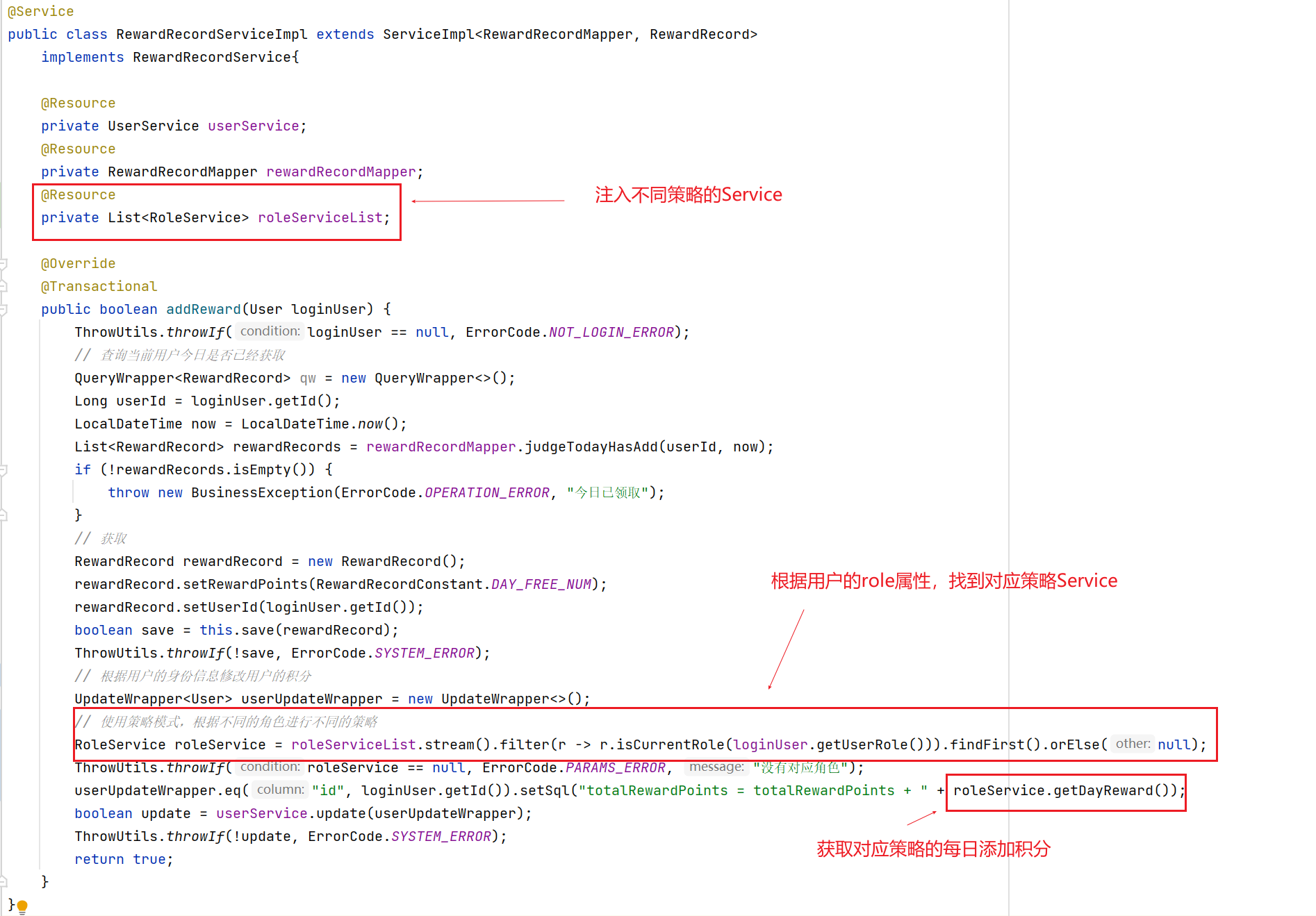
设计模式之策略模式实践
设计模式之策略模式实践 先了解一下策略模式的定义是什么?解决什么问题 策略模式是一种行为设计模式,它定义了一系列算法,将每个算法封装成一个类,并使它们可以互相替换。策略模式允许客户端在运行时从可互换的算法中选择一个&a…...

讨论:解决哈希冲突的几种方法
1. 什么是哈希 哈希是通过对数据进行再压缩,提高效率的一种解决方法。 2. 什么时候会产生哈希冲突 通过哈希函数产生的哈希值是有限的,当数据量比较大时经过哈希函数处理后仍然有不同的数据对应相同的值。这时候就产生了哈希冲突。 3. 常见的哈希函数 1&…...
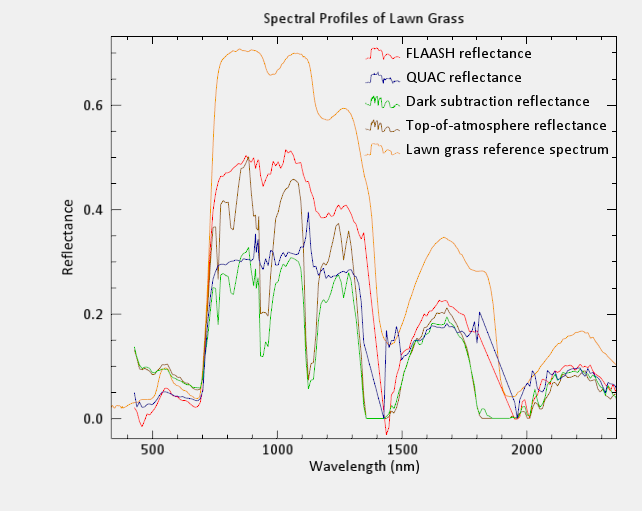
遥感分析时什么情况下需要做大气校正?
经常会遇到这样的问题:什么情况需要做大气校正产生?这个问题取决于传感器和应用目标,总的来说,如果要做光谱分析,那么大气校正是必须要做的。本文对于在什么情况下选择什么样的大气校正方法,给出了一些依据…...
)
Gemini Nano离线推理部署手册(移动端LLM轻量化部署终极版)
更多请点击: https://codechina.net 第一章:Gemini Nano离线推理部署手册(移动端LLM轻量化部署终极版) Gemini Nano 是 Google 推出的首个专为端侧设备设计的轻量级大语言模型,支持在 Android 14 设备上本地运行&…...

5分钟精通英雄联盟信息修改:LeaguePrank新手完全使用指南
5分钟精通英雄联盟信息修改:LeaguePrank新手完全使用指南 【免费下载链接】LeaguePrank 项目地址: https://gitcode.com/gh_mirrors/le/LeaguePrank 你是否曾在英雄联盟中羡慕别人的华丽段位边框,却苦于自己的段位不够理想?你是否想要…...

如何快速掌握unnpk:网易游戏资源解包的完整入门指南
如何快速掌握unnpk:网易游戏资源解包的完整入门指南 【免费下载链接】unnpk 解包网易游戏NeoX引擎NPK文件,如阴阳师、魔法禁书目录。 项目地址: https://gitcode.com/gh_mirrors/un/unnpk 你是否曾经好奇过网易游戏《阴阳师》中那些精美的角色立绘…...

长期使用Taotoken聚合API在服务稳定性方面的体验分享
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Taotoken聚合API在服务稳定性方面的体验分享 作为一家长期依赖大模型能力进行产品开发的团队,我们在过去数月里…...
)
企业自建内部知识库,最容易死在这8个问题上(管理+技术双维度)
很多企业想做内部知识库:把经验、图纸、方案、流程、故障案例沉淀下来,避免人员流失就丢技术、避免重复踩坑。但真正落地后,90%都变成了“僵尸文档库”——要么没人用、没人更,要么技术层面跟不上需求,AI模式形同虚设。…...

别再只盯着大厂光环了:聊聊外包经历对技术人真正的价值与局限
外包经历的技术价值辩证:从职业跳板到能力陷阱的深度思考 当招聘网站上"大厂外包"的职位描述与诱人薪资同时出现时,很多技术人都会面临职业选择的十字路口。我们习惯性地将外包岗位视为"二等公民",却鲜少客观分析这段经历…...

DxO PureRAW中文破解版
🔥RAW图像降噪神器!DxO PureRAW中文破解版来了!🚀哈喽,各位摄影老铁们好呀!👋👋 今天给大家安利一款超级硬核的RAW图像处理工具—— ✨ DxO PureRAW ✨ 这可是 DxO Labs 旗下的行业领…...

5G网络优化关键参数解读:从入门到实战
5G网络优化中,参数调整是最核心的日常操作。本文系统梳理5G NR关键优化参数,帮助初学者快速建立参数优化知识体系。一、5G NR参数分类5G网络优化参数按功能可分为5大类:类别参数数量核心参数优化频率功率控制参数~30个P0、Alpha、MaxPower高切…...

从ZZULIOJ 1138题出发,手把手教你用C语言写一个‘标识符检查器’小工具
从OJ题到实战工具:用C语言打造智能标识符检查器 在编程学习过程中,我们经常遇到各种在线判题系统(OJ)的练习题,比如判断一个字符串是否为合法的C语言标识符。这类题目看似简单,但如何将其转化为一个真正实用…...

终极指南:3步重塑你的Windows桌面视觉体验
终极指南:3步重塑你的Windows桌面视觉体验 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/TranslucentTB 想象一下,当你专注工作…...