【NR技术】 3GPP支持无人机的关键技术以及场景
1 背景
人们对使用蜂窝连接来支持无人机系统(UAS)的兴趣浓厚,3GPP生态系统为UAS的运行提供了极好的好处。无处不在的覆盖范围、高可靠性和QoS、强大的安全性和无缝移动性是支持UAS指挥和控制功能的关键因素。与此同时,监管机构正在调查安全和性能标准以及注册和许可计划,以开发一个功能良好的私人和民用无人机生态系统,该生态系统可以安全地与商业空中交通、公共和私人基础设施以及一般人群共存。
3GPP系统可以为无人机系统提供控制平面和用户平面通信服务。可以提供给UAS生态系统的服务示例包括用于指挥和控制(C2)的数据服务、远程信息处理、UAS生成的数据、远程识别以及UAS操作的授权、执行和监管。
2 名词定义
地面以上(AGL):在无人机的上下文中,它是UAV高度参考附近的地面水平。
指挥与控制(C2)通信:用户平面链路,用于在无人机控制者与无人机之间传递无人机运行指挥与控制信息的消息。
无人机系统(UAS):由无人机(UAV)和相关功能组成,包括无人机和控制器之间的指挥和控制(C2)链接,无人机和网络,以及用于远程识别。无人机系统由无人机和无人机控制器组成。
注:一架无人机可以由不同的无人机控制器控制,但在任何给定时间,一架无人机只受一个无人机控制器控制。确保哪个无人机控制器处于活动状态和控制无人机的机制超出了3GPP的范围。
无人驾驶航空系统交通管理(UTM):一套用于管理一系列自动驾驶操作的功能和服务。
无人机控制器:无人机控制器使无人机驾驶员能够控制无人机。
UxNB:机载无人机无线接入节点。它是一个无线接入节点,提供ue的连接,由一架无人驾驶飞行器(UAV)在空中携带。
3 无人机概述
无人驾驶航空系统(UAS)是无人驾驶飞行器(UAV)(有时称为无人机)和无人机控制器的组合。在某些情况下,无人机是一种没有人类飞行员的飞机。无人机可以由操作员通过无人机控制器进行控制,并且将具有一系列自主飞行能力。无人机与无人机控制器之间的通信系统,在本规范范围内,在某些场景下,由3GPP系统提供。UAS模型还考虑了无人机控制器通过3GPP范围之外的机制与无人机通信的场景。
无人机的尺寸和重量范围从通常用于娱乐目的的小型轻型飞机到通常更适合商业应用的大型重型飞机。监管要求在这个范围内各不相同,并在区域基础上有所不同。
UAS的通信需求既包括指挥和控制(C2),也包括UAS组件与服务3GPP网络和网络服务器之间的上行和下行数据。
无人机系统交通管理(UTM)用于提供一系列服务,以支持无人机及其运营,包括但不限于无人机识别和跟踪、授权、执行、无人机运营监管,以及存储无人机运营所需的数据。它也允许授权用户(例如,空中交通管制,公共安全机构)查询一架无人机及其无人机控制器的身份和元数据。
3.1 C2 通信
当使用3GPP网络作为支持UAS服务的传输网络时,考虑以下C2通信通过保证C2通信的QoS来提供UAS服务:
直接C2通信:无人机控制器与无人机建立直接C2链路相互通信,并利用5G网络提供的配置和调度的无线资源注册到5G网络,进行直接C2通信。
网络辅助C2通信:无人机控制器和无人机分别注册并建立到5G网络的单播C2通信链路,通过5G网络相互通信。此外,无人机控制器和无人机都可以通过不同的NG-RAN节点注册到5G网络。5G网络需要支持机制来处理C2通信的可靠路由。
UTM导航的C2通信:无人机已经为自主飞行提供了预定的飞行计划,例如四维多边形阵列,但是UTM仍然与无人机保持着C2通信链路,以便定期监控无人机的飞行状态,用最新的动态限制验证飞行状态,提供路线更新,并在必要时导航无人机。
一般来说,直接C2通信和网络辅助C2通信由人工操作员使用无人机控制器使用。UTM导航的C2通信用于UTM提供已清除的飞行路线和航线更新。为了保证无人机运行中C2通信的服务可用性和可靠性,特别是当无人机超视距飞行时,从无人机控制器或UTM到无人机的任何C2通信链路都可以建立冗余的C2通信链路。
出于可靠性和服务可用性的考虑,可以激活多个C2通信,其中一个作为C2通信的备份链路,或者在适用于C2通信的链路之间切换。
—例如,可以先使用直接C2通信,待无人机进行BLOS飞行时,再切换到网络辅助C2通信。
-例如,UTM导航的C2通信可以在需要时使用,例如用于空中交通管制,无人机正在接近无无人机区域,并检测到潜在的安全威胁等。
针对无人机的操作,C2通信中考虑了四种控制模式,在消息间隔、大小和端到端延迟等方面有不同的要求,包括转向航路点、直接操纵杆转向、UTM自动飞行和接近自主导航基础设施。
-转向航路点:控制消息包含飞行声明,例如航路点,从无人机控制器或UTM发送到无人机。控制方式既可用于直接C2通信,也可用于网络辅助C2通信。
-直接操纵杆转向:控制信息包含从无人机控制器发送给无人机的方向指令,同时可选的视频流量作为无人机向无人机控制器的反馈。控制方式既可用于直接C2通信,也可用于网络辅助C2通信。
-UTM自动飞行:控制信息包含预先设定的飞行计划,例如四维多边形阵列,从UTM发送给无人机,无人机随后自主飞行并定期报告位置。该控制方式用于utm导航的C2通信。
-接近自主导航基础设施:控制信息包含方向指令,例如从UTM到无人机的航路点,高度和速度。当无人机着陆/起飞时,UTM与自主导航基础设施更紧密地协调,例如垂直机场或包裹配送中心。该控制方式用于utm导航的C2通信。
4 无人机远程识别要求
4.1 通用要求
(1)3GPP系统应该使UTM能够关联无人机和无人机控制器,并且UTM能够将它们识别为无人机。
(2) 3GPP系统应能够向UTM提供无人机系统的身份。
(3)3GPP系统应使无人机能够向UTM发送无人机数据,这些数据可以包含:唯一身份(这可能是3GPP身份)、无人机的UE能力、制造商和型号、序列号、起飞重量、位置、所有者身份、所有者地址、所有者联系方式、所有者认证、起飞位置、任务类型、航线数据、运行状态。
(4) 3GPP系统应使无人机能够向UTM发送无人机控制器数据,这些数据可以包含:唯一身份(这可能是3GPP身份)、无人机控制器的UE能力、位置、所有者身份、所有者地址、所有者联系方式、所有者认证、无人机操作员身份、无人机操作员执照、无人机操作员证书、无人机飞行员身份、无人机飞行员执照、无人机飞行员证书和飞行计划。
(5)3GPP系统应使UAS能够根据应用于UAS的不同认证和授权级别向UTM发送不同的UAS数据。
注0:根据地区规定,不同的认证授权级别可以是:初始网络接入认证授权、无人机身份认证、无人机飞行计划授权、附加UTM业务认证,如飞行监控、防撞服务等。
(6)随着UTM及其未来支持应用的发展,3GPP系统应支持扩展发送到UTM的UAS数据的能力。
(7)基于规定和安全保护,3GPP系统应允许UAS向UTM发送标识符,标识符可以是IMEI、MSISDN、IMSI或IP地址。
(8) 3GPP系统应使UAS中的UE能够向UTM发送以下标识符:IMEI, MSISDN或IMSI,或IP地址
(9)3GPP系统应该使MNO能够通过以下方式增加发送到UTM的数据:无人机和无人机控制器的基于网络的定位信息。
注1:这种增强可能是基于信任的(即MNO通知UTM无人机位置信息是可信的),也可能是基于网络信息的附加位置信息,如OTDOA、蜂窝坐标、同步源等。
注2:此要求不适用于UAS与UTM不经过MNO直接控制通信连接的情况,如OTDOA、小区坐标、同步源等。
(10) 3GPP系统应使UTM能够将运营授权的结果通知移动运营商。
(11) 3GPP系统应使MNO仅在存在适当订阅信息的情况下才允许UAS授权请求。
(12)3GPP系统应使无人机能够用无人机及其无人机控制器的实时位置信息更新UTM。
(13) 3GPP网络应该能够向UTM提供无人机及其控制器的补充位置信息。
注3:这种补充可以是基于信任的(即MNO通知UTM无人机位置信息是可信的),也可以是基于网络信息的附加位置信息。
(14)3GPP网络应支持无人机,相应的无人机控制器同时连接不同的plmn。
(14a)3GPP系统应支持无人机,相应的无人机控制器同时连接不同的plmn。
(15)3GPP系统应为网络提供获取无人机信息的能力,以支持为无人机操作而设计的3GPP通信能力。
(16) 3GPP系统应支持UAS识别和订阅数据,这些数据可以区分UAS与支持UAS的UE以及UAS与不支持UAS的UE。
注4:支持UAS的终端是指支持UTM交互能力和3GPP为UAS提供的某些通信特性的终端。
(17) 3GPP系统应支持UTM检测未经授权操作的无人机。
注5:上述要求涵盖的场景为FFS。
(18) 5G系统应能够检测到连接的终端是机载的,当终端没有空中订阅。
(19)5G系统应能够支持一种机制,使网络运营商能够跟踪没有空中订阅的机载连接UE。
(20)基于运营商和UTM策略,5G系统应能够向UTM提供机载UE的位置和3GPP标识,以满足UTM的请求。
注6:预计UTM将使用3GPP标识和终端位置来确定包含终端的机载物体的位置。
4.2 无人机传输管理
注意:以下要求对集中式和分散式UTM都有效。
(1)3GPP系统应为UTM提供向无人机提供航线数据以及飞行许可的机制。
(2)3GPP系统应能够以小于500ms的延迟将从UTM接收到的路由修改信息发送到UAS。
(3) 3GPP系统应能够以小于500毫秒的延迟将从UTM接收到的通知发送到无人机控制器。
(4)基于MNO政策和/或监管要求,3GPP系统应使UTM能够接管用于控制无人机的通信。
非集中的无人机系统传输管理
(1) 3GPP系统应使无人机能够广播以下数据,以识别近距离区域内的无人机,以避免碰撞:例如,根据不同的法规要求,无人机类型,当前位置和时间,飞行路线信息,当前速度,运行状态等需要的无人机身份。
(2) 3GPP系统应能够支持无人机通过网络连接向其他无人机发送信息,以识别自己是无人机。
(3)3GPP系统应使无人机能够在其身份信息广播中保护无人机所有者、无人机飞行员和无人机操作员的隐私。
(4) 3GPP系统应使一架无人机能够在短距离内从其他无人机接收本地广播通信传输服务。
(5)无人机应能够在3GPP网络覆盖范围内或覆盖范围外使用直接无人机到无人机的本地广播通信传输服务。
(6)当发送和接收无人机由相同或不同的plmn提供服务时,无人机应能够使用直接的无人机到无人机本地广播通信传输服务。
(7)3GPP系统应以高达320公里/小时的相对速度支持直接无人机到无人机的本地广播通信传输服务。
(8)3GPP系统应支持无人机到无人机的直接本地广播通信传输服务,具有50-1500字节的可变消息有效载荷,不包括与安全相关的消息组件。
(9) 3GPP系统应支持直接无人机到无人机的本地广播通信传输服务,支持最大600米的范围。
(10) 3GPP系统应支持直接无人机到无人机的本地广播通信传输服务,该服务可以以每秒至少10条消息的频率传输消息。
(11)3GPP系统应支持直接无人机到无人机的本地广播通信传输服务,该服务可以以最多100ms的端到端延迟传输消息。
安全
(1)3GPP系统应保护UAS和UTM之间的数据传输。
(2)3GPP系统应防止UAS身份的欺骗攻击。
(3)3GPP系统应允许在应用层的UAS和UTM之间发送的数据不可否认。
(4)3GPP系统应支持为UAS和UTM之间的不同连接以及通过这些连接传输的数据提供不同级别的完整性和隐私保护的能力。
(5)3GPP系统应支持与无人机系统和个人可识别信息相关的身份保密保护。
(6)3GPP系统应支持UAS流量的监管要求(例如合法拦截)。
5 无人机使用要求
5.1 概述
除了无人机相关需求之外,3GPP还可以通过在各种商业和政府部门使用低空无人机来支持广泛的应用和场景。3GPP系统支持各种无人机应用的新服务水平要求和关键KPI指标已被确定和指定,例如与指挥和控制(C2)、有效载荷(如摄像头)和机载无人机无线电接入节点操作相关的服务要求和关键KPI指标。
5.2 无人机服务的网络监控
(1) 3GPP系统应提供允许第三方请求和获取无人机状态信息(例如,无人机位置、通信链路状态)的实时监控手段。
(2)根据运营商的政策,3GPP系统应提供向第三方提供有关无人机在特定地理区域和/或特定时间的服务状态信息的方法。
注:服务状态是指网络是否能够向无人机提供具有一定QoS的通信服务。
(3)根据运营商的政策,5G系统应能够支持一种预测、监控网络状况和QoS(例如比特率、延迟、可靠性)的方法,并在无人机预期飞行持续时间的特定时间,沿着连续的地理规划飞行路径向第三方报告。
5.3 无人机机载ue的使用限制
(1)3GPP网络应能够支持UE机载无人机基于网络的3D空间定位(例如,高度30~300m)。
(2)3GPP系统应能够在无人机机载终端进入未授权终端提供连接服务的区域(例如,由于海拔高度)之前,通知授权第三方连接服务可能停止。
5.4 UxNB的要求
(1)5G系统应能够支持UxNB,以提供增强和更灵活的无线覆盖。
(2)3GPP系统应能够提供合适的手段来控制UxNB的运行(如启动运行、停止运行、更换UxNB等)。
(3) 3GPP系统应能够提供最小化UxNB功耗的方法(例如优化运行参数、优化流量交付)。
(4)3GPP系统应能够最大限度地减少干扰,例如由UxNB改变位置引起的干扰。
5.5 C2通信
(1)3GPP系统应支持具有预定义C2通信模型所需QoS的C2通信(例如,在无人机和无人机控制器之间使用直接的ProSe通信,在UTM和无人机之间基于飞行计划的UTM导航C2通信)。
(2)当在C2通信模型之间切换时,3GPP系统应支持具有所需QoS的C2通信。
(3)3GPP系统应支持一种机制,使UTM能够以预定义的C2通信模型所需的QoS请求监视C2通信(例如,在UAV和UAV控制器之间使用直接的ProSe通信,UTM和UAV之间使用UTM导航的C2通信)。
5.6 UAV安全
(1)5G系统应支持确定UTM是否支持法规要求的方法,例如无人机与无人机控制器之间的最大VLOS距离。
注:此要求适用于无人机和无人机控制器同时接入3GPP网络的情况。
(2)根据运营商的政策,5G系统应能够支持一种方法,向UTM和无人机提供5G系统收集或生成的信息(例如,基于传感结果),包括3GPP无人机与其他飞行物体(可以是未使用3GPP连接的无人机)之间的位置或相对距离。
(3)5G系统应能够跟踪无人机控制器,无论连接类型如何。
(4)基于移动运营商政策和/或监管要求,5G系统应能够在5G系统检测到特定无人机状况或事件时通知UTM,以便UTM能够控制无人机通信(例如,当检测到违反禁区或无人机之间的最大距离时)。
5.7 飞行路线和区域管理
(1)基于第三方请求和运营商政策,5G系统应能够重新配置网络资源,以沿着无人机计划的飞行路径(例如在特定的地理区域和时间)提供所需的QoS。
(2)5G系统应能够支持UTM配置无人机应用设置和通信QoS可能不同的空中飞行区域的机制,并为网络和无人机提供识别这些飞行区域的手段。
(3) 5G系统应能够支持UTM向网络和无人机提供策略信息的机制,包括无人机应用设置和在特定空中飞行区域应用的通信QoS,例如基于特定地理位置的无人机所指示或可用的飞行区域类型。
(4)根据运营商的政策,5G系统应能够支持一种监控方法,并向第三方提供有关无人机飞行路径和时间的偏差和违规信息。
注:偏差可以是与原飞行计划有关的地点和/或时间。违规行为可以是与飞行计划一起提供的或通过其他方式已知的禁区。注:偏差可以是与原飞行计划有关的地点和/或时间。违规行为可以是与飞行计划一起提供的或通过其他方式已知的禁区。
5.8 UTM协助要求
(1)根据运营商的政策,5G系统应能够根据预测的网络条件和QoS(如比特率、延迟、可靠性),向UTM提供无人机服务需求能够或不能满足的地理区域信息。
(2)基于第三方请求,5G系统应能够协助UTM通过机制向第三方提供替代的无人机飞行路径,例如,基于所需的航路点、QoS和禁区。
(3) 5G系统应能够支持UTM或其他授权第三方的业务使能层暴露机制,为无人机应用提供配置信息,以便在一个主PLMN连接和一个备用PLMN连接之间路由和切换流量,例如为了C2通信可靠性和冗余目的,或者同时在不同的PLMN连接上路由不同的流量,例如C2流量通过一个PLMN,其他数据通过第二个PLMN。
注1:上述要求可扩展到一个网络为PLMN,一个网络为NPN的场景。
注2:对传统网络选择没有影响。
注3:假设无人机在每个PLMN上的流量处理受NW控制机制的约束(例如,根据MNO路由优先级、可用QoS/NW资源等)。
(4)在用户同意和国家或地区法规的前提下,基于运营商和UTM政策,5G系统可能能够向UTM提供使用5G无线传感获得的空中物体位置,以满足UTM的请求。
注4:空中目标位置预计将被UTM用于确定空中目标的位置。
6 UAS参考模型

在UAS参考模型中:
- UAS由一架无人机和一架无人机控制器组成
-无人机通过蜂窝连接连接
-无人机可以通过3GPP移动网络连接的无人机控制器进行控制
-无人机可以由无人机控制器控制,不通过3GPP移动网络连接,使用不在3GPP范围内的C2接口
通过3GPP移动网络连接的无人机控制器可以控制一架或多架无人机 - UAS与UTM交换应用程序数据流量
注:存在几种类型的无人机控制器,例如手持无人机控制器,pc / ws和自动或手动功能,这些都是UTM的一部分。确保哪个无人机控制器处于活动状态和控制无人机的机制超出了3GPP的范围。
7 参考文献
3GPP 22.155
相关文章:
【NR技术】 3GPP支持无人机的关键技术以及场景
1 背景 人们对使用蜂窝连接来支持无人机系统(UAS)的兴趣浓厚,3GPP生态系统为UAS的运行提供了极好的好处。无处不在的覆盖范围、高可靠性和QoS、强大的安全性和无缝移动性是支持UAS指挥和控制功能的关键因素。与此同时,监管机构正在调查安全和性能标准以及…...

【译】WordPress Bricks主题安全漏洞曝光,25,000个安装受影响
WordPress的Bricks主题存在一个严重的安全漏洞,恶意威胁行为者正在积极利用该漏洞在易受攻击的安装上运行任意PHP代码。 该漏洞被跟踪为CVE-2024-25600(CVSS评分:9.8),使未经身份验证的攻击者能够实现远程代码执行。它…...

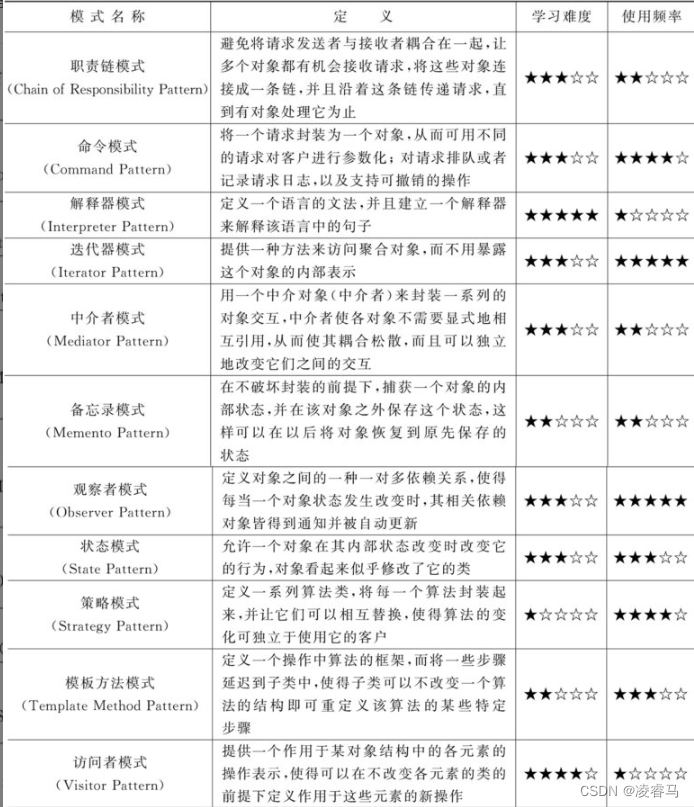
【C++ 23种设计模式】
C 23种设计模式 ■ 创建型模式(5种)■ 工厂模式■ 抽象工厂模式■ 原型模式■ 单例模式■ 第一种:单线程(懒汉)■ 第二种:多线程(互斥量实现锁懒汉)■ 第三种:多线程(const static饿…...

亚信安慧AntDB:企业数据管理的明日之星
在信息科技飞速发展的时代,亚信科技AntDB团队提出了一项颠覆性的“超融合”理念,旨在满足企业日益增长的复杂混合负载和多样化数据类型的业务需求。这一创新性框架的核心思想在于融合多引擎和多能力,充分发挥分布式数据库引擎的架构优势&…...

Android Gradle开发与应用 (三) : Groovy语法概念与闭包
1. Groovy介绍 Groovy是一种基于Java平台的动态编程语言,与Java是完全兼容,除此之外有很多的语法糖来方便我们开发。Groovy代码能够直接运行在Java虚拟机(JVM)上,也可以被编译成Java字节码文件。 以下是Groovy的一些…...
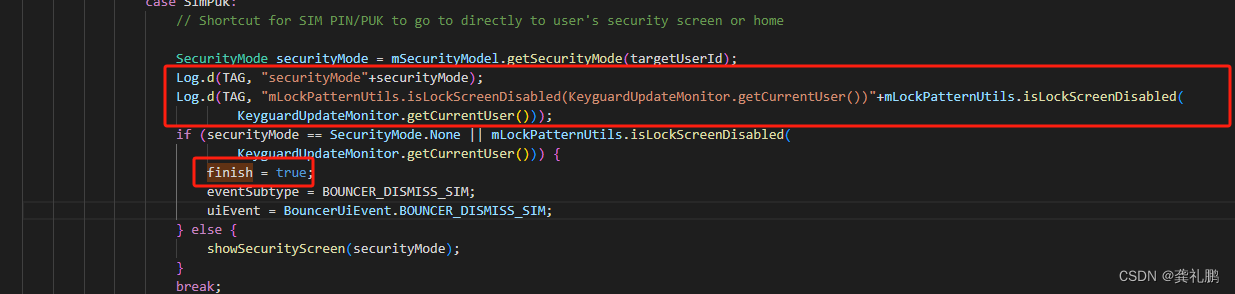
Android 14 设置锁屏为NONE后开启双卡PIN锁,重启设备后,输完卡1的PIN码就进入了安卓界面,未提示输入卡2的PIN码
一.问题背景 目前在多个Android14平台发现开启双卡PIN码并且关闭屏幕锁的情况下,第二个PIN码锁输入弹框不能弹出问题,导致第二个卡不能注网。 如下是未修改前重启后解锁卡1PIN码的状态 可以看出卡2不能正常使用 二.何处关闭了卡2的PIN锁? 1.添加日志 首先在KeyguardSecu…...
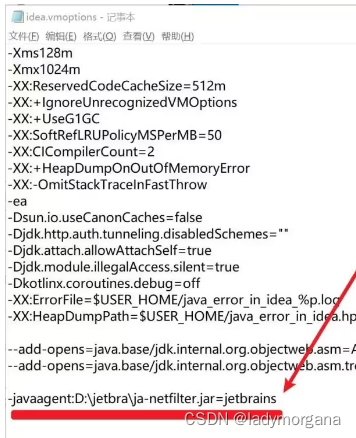
2024 GoLand激活,分享几个GoLand激活的方案
文章目录 GoLand公司简介我这边使用GoLand的理由GoLand 最新变化GoLand 2023.3 最新变化AI Assistant 正式版GoLand 中的 AI Assistant:_Rename_(重命名)GoLand 中的 AI Assistant:_Write documentation_(编写文档&…...
linux中对信号的认识
信号的概念与相关知识认识 信号是向目标进程发送消息通知的的一种机制。 信号可以以异步的方式发送给进程,也就是说,进程无需主动等待,而是在任何时间都可以接收到信号。 信号的种类 用kill-l命令查看系统定义的信号列表: 前台…...

【万题详解】P1048 [NOIP2005 普及组] 采药
题目描述 链接——题目在这里!!! 辰辰是个天资聪颖的孩子,他的梦想是成为世界上最伟大的医师。为此,他想拜附近最有威望的医师为师。医师为了判断他的资质,给他出了一个难题。医师把他带到一个到处都是草…...
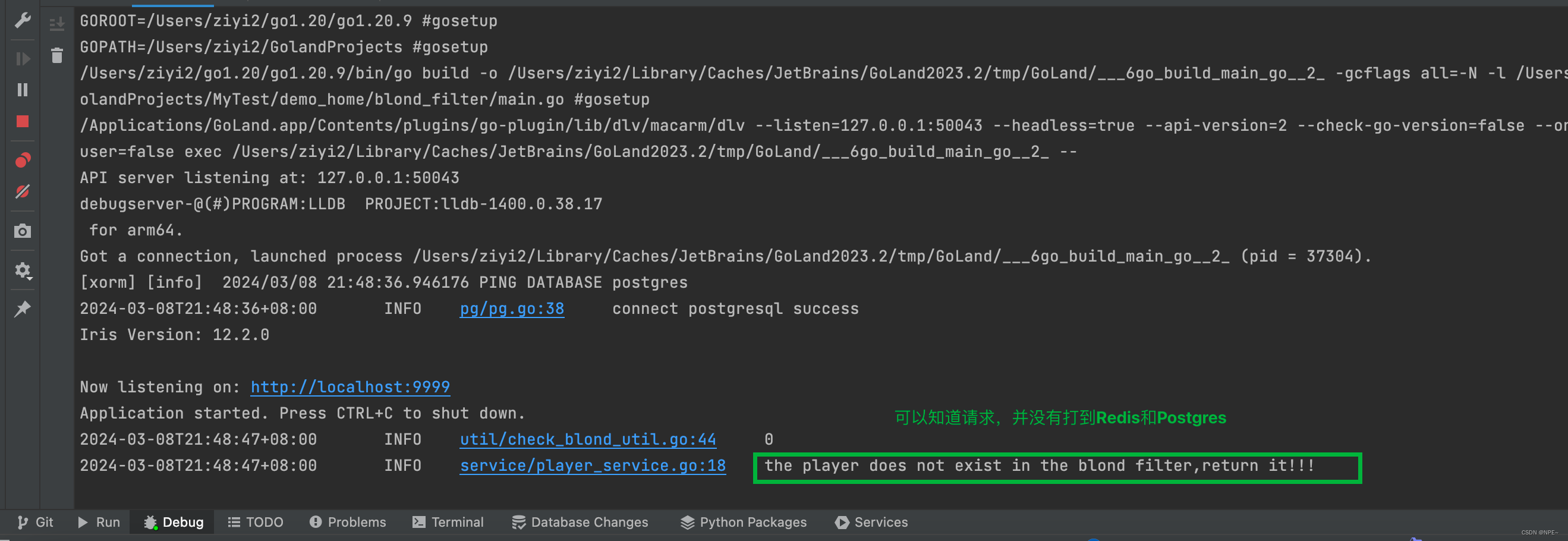
Golang基于Redis bitmap实现布隆过滤器(完结版)
Golang基于Redis bitmap实现布隆过滤器(完结版) 为了防止黑客恶意刷接口(请求压根不存在的数据),目前通常有以下几种做法: 限制IP(限流)Redis缓存不存在的key布隆过滤器挡在Redis前 …...

Java基础-内部类
内部类 引言内部类的共性成员内部类静态内部类非静态内部类 局部内部类匿名内部类内部类的使用场景和好处 引言 Java不仅可以定义变量和方法,还可以定义类. 内部类允许你把一些逻辑相关的类组织在一起,并可以控制内部中类的可见性. 这么看来,内部类就像是代码一种隐藏机制:将类…...
设计模式-行为型模式-职责链模式
在软件系统运行时,对象并不是孤立存在的,它们可以通过相互通信协作完成某些功能,一个对象在运行时也将影响到其他对象的运行。行为型模式(Behavioral Pattern)关注系统中对象之间的交互,研究系统在运行时对…...

代码随想录算法训练营第四十天|LeetCode343 整数拆分、LeetCode96 不同的二叉搜索树
343.整数拆分 思路:确定dp数组以及下标的含义 dp[i]代表 i可以被拆分后的最大乘积。确定递推公式,假如拆成连个数,dp[i] j*(i-j),拆成两个数以上,dp[i]j*dp[i-j],j的范围为1到i-1.dp[i]找到所有情况的最大值。初始化…...
接口自动化测试用例如何设计
说到自动化测试,或者说接口自动化测试,多数人的第一反应是该用什么工具,比如:Python Requests、Java HttpClient、Apifox、MeterSphere、自研的自动化平台等。大家似乎更关注的是哪个工具更优秀,甚至出现“ 做平台的 &…...
弱电综合布线:连接现代生活的纽带
在当今信息化快速发展的时代,弱电网络布线作为信息传输的重要基础设施,其作用日益凸显。它不仅保障了数据的高效流通,还确保了通信的稳定性。从商业大厦到教育机构,从政府机关到医院急救中心,再到我们居住的社区&#…...
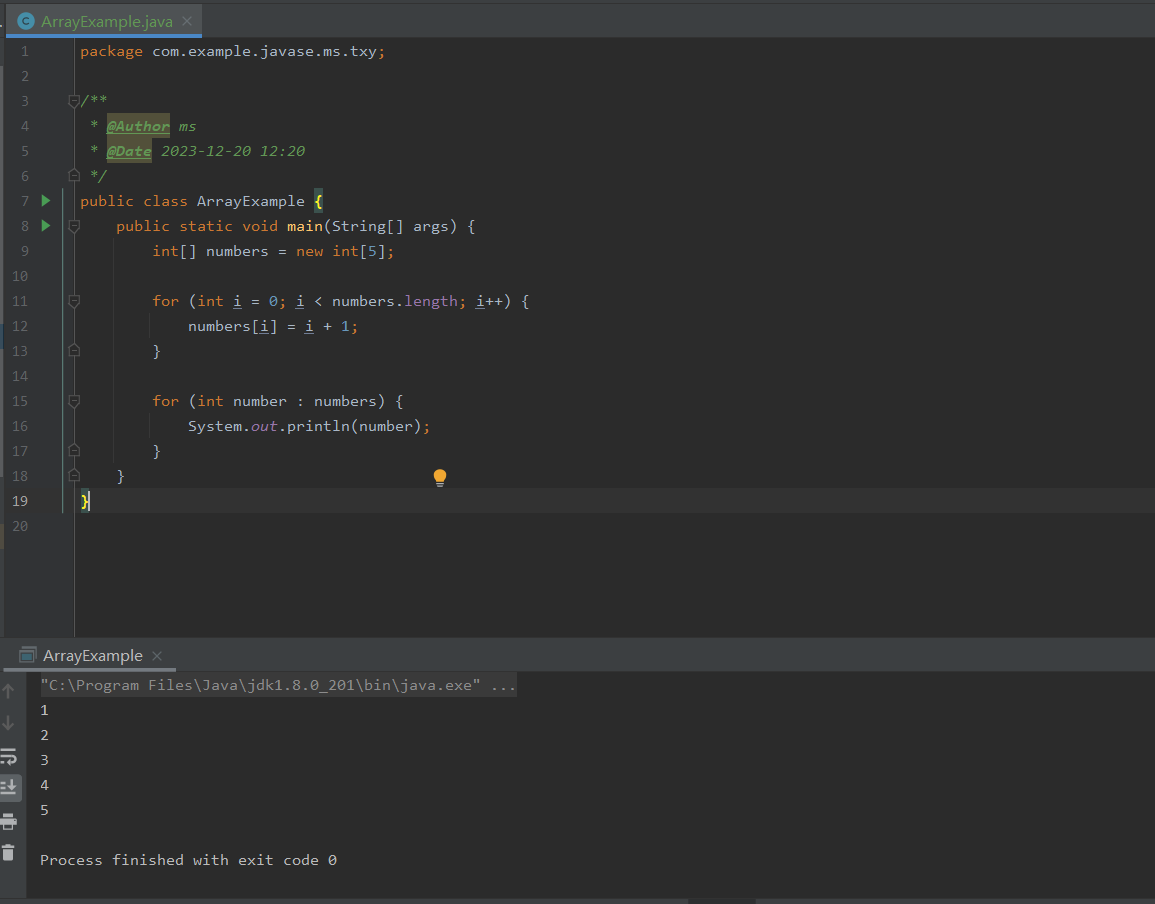
Java零基础 - 数组的定义和声明
哈喽,各位小伙伴们,你们好呀,我是喵手。 今天我要给大家分享一些自己日常学习到的一些知识点,并以文字的形式跟大家一起交流,互相学习,一个人虽可以走的更快,但一群人可以走的更远。 我是一名后…...

CSS补充(下),弹性布局(上)
高级选择器 1.兄弟选择器 2.同时满足 div.bg{background-color: red;}p.bg{background-color: green;}spam.bg{background-color: blue;}注:选择器中间没有空格,有明确标识的选择器写在后面 3.各种伪类的应用 3.1作为第几个子元素 选择器:nth-child…...
)
图数据库 之 Neo4j - 应用场景4 - 反洗钱(9)
原理 Neo4j图数据库可以用于构建和分析数据之间的关系。它使用节点和关系来表示数据,并提供实时查询能力。通过使用Neo4j,可以将大量的交易数据导入图数据库,并通过查询和分析图结构来发现洗钱行为中的模式和关联。 案例分析 假设有一家转账服务公司,有以下交易数据,每个…...

uboot分区介绍
RK平台的U-Boot支持两种分区表 RK paramter格式(旧)和 标准GPT格式(新),当机器上同时存在 两种分区表时,优先使用GPT分区表。无论是 GPT 还是 RK parameter,烧写用的分区表文件都叫parameter.t…...

快速收集诊断信息,敏捷诊断工具obdiag应用实践——《OceanBase诊断系列》之三
1. 前言 作为OceanBase的敏捷诊断工具,obdiag具有以下特点: 部署便捷:提供rpm包和OBD上部署的模式,都能够一键部署安装。用户可以选择将其部署到集群中任意一台能连接到各个节点的设备上,而不仅限于OBServer节点。即…...

RPG Maker MV/MZ 资源解锁指南:3分钟学会游戏资源解密与加密
RPG Maker MV/MZ 资源解锁指南:3分钟学会游戏资源解密与加密 【免费下载链接】RPG-Maker-MV-Decrypter You can decrypt RPG-Maker-MV Resource Files with this project ~ If you dont wanna download it, you can use the Script on my HP: 项目地址: https://g…...
的区别与实战应用场景)
达芬奇剪辑效率翻倍秘籍:深入解读F9到F11(插入、覆盖、替换)的区别与实战应用场景
达芬奇剪辑效率翻倍秘籍:深入解读F9到F11(插入、覆盖、替换)的区别与实战应用场景 在专业视频剪辑领域,DaVinci Resolve凭借其强大的功能和流畅的工作流程,已成为众多剪辑师的首选工具。然而,许多中级用户在…...
)
别再折腾了!保姆级教程:用Unity Hub + VS2022搞定Unity开发环境(附安卓模块选择建议)
Unity开发环境配置终极指南:从避坑到高效搭建 刚接触Unity开发的新手往往会在环境配置阶段遭遇各种"坑"——编辑器版本选择困难、Visual Studio组件勾选错误、安卓模块配置不当等问题层出不穷。我曾见过不少热情满满的初学者在这个阶段耗费数天时间反复重…...

BitNet b1.58-2B-4T实战指南:WebUI离线使用与本地模型缓存策略
BitNet b1.58-2B-4T实战指南:WebUI离线使用与本地模型缓存策略 1. 项目概述 BitNet b1.58-2B-4T是一款革命性的1.58-bit量化开源大模型,采用独特的-1、0、1三值权重设计(平均1.58 bit),配合8-bit整数激活,…...
)
PYTHON学习笔记12(os模块)
OS文件/目录方法os模块是python标准库中的一个重要模块,提供了与操作系统交互的功能,通过此模块可以执行文件操作、目录操作、环境变量管理、进程管理等任务。os模块是跨平台的,可以在不同的操作系统使用相同的代码。使用os模块之前ÿ…...

3分钟掌握免费开源神器:B站视频转文字一键搞定
3分钟掌握免费开源神器:B站视频转文字一键搞定 【免费下载链接】bili2text Bilibili视频转文字,一步到位,输入链接即可使用 项目地址: https://gitcode.com/gh_mirrors/bi/bili2text 还在为手动整理B站视频笔记而烦恼吗?想…...

3步诊断与修复:为什么你的Windows任务栏透明工具开机不启动?
3步诊断与修复:为什么你的Windows任务栏透明工具开机不启动? 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/TranslucentTB Tran…...

如何解决HPC和学术环境中LDAP用户无root权限构建容器镜像难题:img工具的完整应用指南
如何解决HPC和学术环境中LDAP用户无root权限构建容器镜像难题:img工具的完整应用指南 【免费下载链接】img Standalone, daemon-less, unprivileged Dockerfile and OCI compatible container image builder. 项目地址: https://gitcode.com/gh_mirrors/im/img …...

从多旋翼到无人车:APM/ArduPilot开源项目实战指南,一个地面站搞定5种模型
从多旋翼到无人车:APM/ArduPilot开源项目实战指南 在模型爱好者的世界里,从天空翱翔的无人机到地面疾驰的无人车,再到水中潜行的无人船,控制系统的统一性和可移植性一直是开发者面临的挑战。APM/ArduPilot开源项目以其惊人的通用性…...

智慧树刷课插件终极指南:如何3步实现视频自动化学习,效率翻倍![特殊字符]
智慧树刷课插件终极指南:如何3步实现视频自动化学习,效率翻倍!🚀 【免费下载链接】zhihuishu 智慧树刷课插件,自动播放下一集、1.5倍速度、无声 项目地址: https://gitcode.com/gh_mirrors/zh/zhihuishu 还在为…...