矩阵求导笔记
文章目录
- 1. ML中为什么需要矩阵求导
- 2. 向量函数与矩阵求导初印象
- 3. YX 拉伸术
- 3.1 f(x)为标量,X为列向量
- 3.2 f(x)为列向量,X 为标量
- 3.3 f(x)为列向量,X 为列向量
- 4. 常见矩阵求导公式
1. ML中为什么需要矩阵求导
-
简洁
用方程式表示如下:
y 1 = w 1 X 11 + w 2 X 12 (1) y_1=w_1X_{11}+w_2X_{12}\tag{1} y1=w1X11+w2X12(1)
y 2 = w 1 X 21 + w 2 X 22 (2) y_2=w_1X_{21}+w_2X_{22}\tag{2} y2=w1X21+w2X22(2)
转换成矩阵表示如下:
Y = X W (3) Y=XW\tag{3} Y=XW(3)
Y = [ y 1 y 2 ] , X = [ x 11 x 12 x 21 x 22 ] , W = [ w 1 w 2 ] (4) Y=\begin{bmatrix}y_1\\\\y_2\end{bmatrix},X=\begin{bmatrix}x_{11}&&x_{12}\\\\x_{21}&&x_{22}\end{bmatrix},W=\begin{bmatrix}w_{1}\\\\w_{2}\end{bmatrix}\tag{4} Y= y1y2 ,X= x11x21x12x22 ,W= w1w2 (4) -
快速
当使用python 中的numpy 库时候,在相对于 for 循环,Numpy 本身的计算提速相当快 -
源代码
import time
import numpy as npif __name__ == "__main__":N = 1000000a = np.random.rand(N)b = np.random.rand(N)start = time.time()c = np.dot(a,b)stop = time.time()print(f"c={c}")print("vectorized version: " + str(1000*(stop-start))+"ms")c = 0start1 = time.time()for i in range(N):c += a[i]*b[i]stop1 = time.time()print(f"c={c}")print("for loop: " + str(1000*(stop1-start1))+"ms")times1 = (stop1-start1)/(stop-start)print(f"times1={times1}")
- 结果
c=250071.8870070607
vectorized version: 6.549358367919922ms
c=250071.88700706122
for loop: 265.43641090393066ms
times1=40.52861303239898# 向量化居然比单独的for循环快40倍
2. 向量函数与矩阵求导初印象
- 标量函数:输出为标量的函数
f ( x ) = x 2 ⇒ x ∈ R → x 2 ∈ R f(x)=x^2\Rightarrow x\in R\rightarrow x^2 \in R f(x)=x2⇒x∈R→x2∈R
f ( x ) = x 1 2 + x 2 2 ⇒ [ x 1 x 2 ] ∈ R 2 → x 1 2 + x 2 2 ∈ R f(x)=x_1^2+x_2^2\Rightarrow \begin{bmatrix}x_1\\\\x_2\end{bmatrix}\in R^2\rightarrow x_1^2+x_2^2 \in R f(x)=x12+x22⇒ x1x2 ∈R2→x12+x22∈R - 向量函数:输出为向量或矩阵的函数
<1> 输入标量,输出向量
f ( x ) = [ f 1 ( x ) = x f 2 ( x ) = x 2 ] ⇒ x ∈ R , [ x x 2 ] ∈ R 2 f(x)=\begin{bmatrix}f_1(x)=x\\\\f_2(x)=x^2\end{bmatrix}\Rightarrow x\in R,\begin{bmatrix}x\\\\x^2\end{bmatrix} \in R^2 f(x)= f1(x)=xf2(x)=x2 ⇒x∈R, xx2 ∈R2
<2> 输入标量,输出矩阵
f ( x ) = [ f 11 ( x ) = x f 12 ( x ) = x 2 f 21 ( x ) = x 3 f 22 ( x ) = x 4 ] ⇒ x ∈ R , [ x x 2 x 3 x 4 ] ∈ R 2 × 2 f(x)=\begin{bmatrix}f_{11}(x)=x&&f_{12}(x)=x^2\\\\f_{21}(x)=x^3&&f_{22}(x)=x^4\end{bmatrix}\Rightarrow x\in R,\begin{bmatrix}x&&x^2\\\\x^3&&x^4\end{bmatrix} \in R^{2\times2} f(x)= f11(x)=xf21(x)=x3f12(x)=x2f22(x)=x4 ⇒x∈R, xx3x2x4 ∈R2×2
<3> 输入向量,输出矩阵
f ( x ) = [ f 11 ( x ) = x 1 + x 2 f 12 ( x ) = x 1 2 + x 2 2 f 21 ( x ) = x 1 3 + x 2 3 f 22 ( x ) = x 1 4 + x 2 4 ] ⇒ [ x 1 x 2 ] ∈ R 2 , [ x 1 + x 2 x 1 2 + x 2 2 x 1 3 + x 2 3 x 1 4 + x 2 4 ] ∈ R 2 × 2 f(x)=\begin{bmatrix}f_{11}(x)=x_1+x_2&&f_{12}(x)=x_1^2+x_2^2\\\\f_{21}(x)=x_1^3+x_2^3&&f_{22}(x)=x_1^4+x_2^4\end{bmatrix}\Rightarrow \begin{bmatrix}x_1\\\\x_2\end{bmatrix} \in R^2,\begin{bmatrix}x_1+x_2&&x_1^2+x_2^2\\\\x_1^3+x_2^3&&x_1^4+x_2^4\end{bmatrix} \in R^{2\times2} f(x)= f11(x)=x1+x2f21(x)=x13+x23f12(x)=x12+x22f22(x)=x14+x24 ⇒ x1x2 ∈R2, x1+x2x13+x23x12+x22x14+x24 ∈R2×2 - 总结
矩阵求导的本质
d A d B = 矩阵 A 中的每个元素对矩阵 B 中的每个元素求导 \frac{\mathrm{d}A}{\mathrm{d}B}=矩阵A中的每个元素对矩阵B中的每个元素求导 dBdA=矩阵A中的每个元素对矩阵B中的每个元素求导
3. YX 拉伸术
3.1 f(x)为标量,X为列向量
- 标量不变,向量拉伸
- YX中,Y前面横向拉,X后面纵向拉
d f ( x ) d x , Y = f ( x ) 为标量, X = [ x 1 x 2 ⋮ x n ] 为列向量 \frac{\mathrm{d}f(x)}{\mathrm{d}x},Y=f(x)为标量,X=\begin{bmatrix}x_1\\\\x_2\\\\\vdots\\\\x_n\end{bmatrix}为列向量 dxdf(x),Y=f(x)为标量,X= x1x2⋮xn 为列向量
f ( x ) = f ( x 1 , x 2 , . . . . , x n ) 为标量 f(x)=f(x_1,x_2,....,x_n)为标量 f(x)=f(x1,x2,....,xn)为标量 - 标量 f ( x ) f(x) f(x)不变,向量X 因为在YX拉伸术中在Y后面,所以向量X纵向拉伸,实际上就是将多元函数的偏导写在一个列向量中
d f ( x ) d x = [ ∂ f ( x ) ∂ x 1 ∂ f ( x ) ∂ x 2 ⋮ ∂ f ( x ) ∂ x n ] \frac{\mathrm{d}f(x)}{\mathrm{d}x}=\begin{bmatrix}\frac{\partial f(x)}{\partial x_1}\\\\\frac{\partial f(x)}{\partial x_2}\\\\\vdots\\\\\frac{\partial f(x)}{\partial x_n}\end{bmatrix} dxdf(x)= ∂x1∂f(x)∂x2∂f(x)⋮∂xn∂f(x)
3.2 f(x)为列向量,X 为标量
f ( x ) = [ f 1 ( x ) f 2 ( x ) ⋮ f n ( x ) ] ; X 为标量 f(x)=\begin{bmatrix}f_1(x)\\\\f_2(x)\\\\\vdots\\\\f_n(x)\end{bmatrix};X 为标量 f(x)= f1(x)f2(x)⋮fn(x) ;X为标量
- 标量不变,向量拉伸
- YX中,Y前面横向拉,X后面纵向拉
d f ( x ) d x = [ ∂ f 1 ( x ) ∂ x ∂ f 2 ( x ) ∂ x … ∂ f n ( x ) ∂ x ] \frac{\mathrm{d}f(x)}{\mathrm{d}x}=\begin{bmatrix}\frac{\partial f_1(x)}{\partial x}&&\frac{\partial f_2(x)}{\partial x}&&\dots&&\frac{\partial f_n(x)}{\partial x}\end{bmatrix} dxdf(x)=[∂x∂f1(x)∂x∂f2(x)…∂x∂fn(x)]
3.3 f(x)为列向量,X 为列向量
f ( x ) = [ f 1 ( x ) f 2 ( x ) ⋮ f n ( x ) ] ; X = [ x 1 x 2 ⋮ x n ] 为列向量 f(x)=\begin{bmatrix}f_1(x)\\\\f_2(x)\\\\\vdots\\\\f_n(x)\end{bmatrix};X=\begin{bmatrix}x_1\\\\x_2\\\\\vdots\\\\x_n\end{bmatrix}为列向量 f(x)= f1(x)f2(x)⋮fn(x) ;X= x1x2⋮xn 为列向量
- 第一步先固定Y ,将 X 纵向拉
d f ( x ) d x = [ ∂ f ( x ) ∂ x 1 ∂ f ( x ) ∂ x 2 ⋮ ∂ f ( x ) ∂ x n ] \frac{\mathrm{d}f(x)}{\mathrm{d}x}=\begin{bmatrix}\frac{\partial f(x)}{\partial x_1}\\\\\frac{\partial f(x)}{\partial x_2}\\\\\vdots\\\\\frac{\partial f(x)}{\partial x_n}\end{bmatrix} dxdf(x)= ∂x1∂f(x)∂x2∂f(x)⋮∂xn∂f(x) - 第二步,看每一个项 ∂ f ( x ) ∂ x 1 \frac{\partial f(x)}{\partial x_1} ∂x1∂f(x),其中f(x)为列向量, x 1 x_1 x1为标量,那么可以看出要进行 Y 横向拉
∂ f ( x ) ∂ x 1 = [ ∂ f 1 ( x ) ∂ x 1 ∂ f 2 ( x ) ∂ x 1 … ∂ f n ( x ) ∂ x 1 ] \frac{\partial f(x)}{\partial x_1}=\begin{bmatrix}\frac{\partial f_1(x)}{\partial x_1}&&\frac{\partial f_2(x)}{\partial x_1}&&\dots&&\frac{\partial f_n(x)}{\partial x_1}\end{bmatrix} ∂x1∂f(x)=[∂x1∂f1(x)∂x1∂f2(x)…∂x1∂fn(x)] - 第三步 ,将每项整合如下
d f ( x ) d x = [ ∂ f 1 ( x ) ∂ x 1 ∂ f 2 ( x ) ∂ x 1 … ∂ f n ( x ) ∂ x 1 ∂ f 1 ( x ) ∂ x 2 ∂ f 2 ( x ) ∂ x 2 … ∂ f n ( x ) ∂ x 2 ⋮ ⋮ … ⋮ ∂ f 1 ( x ) ∂ x n ∂ f 2 ( x ) ∂ x n … ∂ f n ( x ) ∂ x n ] \frac{\mathrm{d}f(x)}{\mathrm{d}x}=\begin{bmatrix}\frac{\partial f_1(x)}{\partial x_1}&&\frac{\partial f_2(x)}{\partial x_1}&&\dots&&\frac{\partial f_n(x)}{\partial x_1}\\\\\frac{\partial f_1(x)}{\partial x_2}&&\frac{\partial f_2(x)}{\partial x_2}&&\dots&&\frac{\partial f_n(x)}{\partial x_2}\\\\\vdots&&\vdots&&\dots&&\vdots\\\\\frac{\partial f_1(x)}{\partial x_n}&&\frac{\partial f_2(x)}{\partial x_n}&&\dots&&\frac{\partial f_n(x)}{\partial x_n}\end{bmatrix} dxdf(x)= ∂x1∂f1(x)∂x2∂f1(x)⋮∂xn∂f1(x)∂x1∂f2(x)∂x2∂f2(x)⋮∂xn∂f2(x)…………∂x1∂fn(x)∂x2∂fn(x)⋮∂xn∂fn(x)
4. 常见矩阵求导公式
4.1 Y = A T X Y=A^TX Y=ATX
f ( x ) = A T X ; A = [ a 1 , a 2 , … , a n ] T ; X = [ x 1 , x 2 , … , x n ] T , 求 d f ( x ) d X f(x)=A^TX;\quad A=[a_1,a_2,\dots,a_n]^T;\quad X=[x_1,x_2,\dots,x_n]^T,求\frac{\mathrm{d}f(x)}{\mathrm{d}X} f(x)=ATX;A=[a1,a2,…,an]T;X=[x1,x2,…,xn]T,求dXdf(x)
- 由于 A T = 1 × n , X = n × 1 , 那么 f ( x ) 为标量,即表示数值 A^T=1\times n,X=n\times1,那么f(x)为标量,即表示数值 AT=1×n,X=n×1,那么f(x)为标量,即表示数值,
- 标量不变,向量拉伸
- YX中,Y前面横向拉,X后面纵向拉
f ( x ) = ∑ i = 1 N a i x i f(x)=\sum_{i=1}^Na_ix_i f(x)=i=1∑Naixi
d f ( x ) d X = [ ∂ f ( x ) ∂ x 1 ∂ f ( x ) ∂ x 2 ⋮ ∂ f ( x ) ∂ x n ] \frac{\mathrm{d}f(x)}{\mathrm{d}X}=\begin{bmatrix}\frac{\partial f(x)}{\partial x_1}\\\\\frac{\partial f(x)}{\partial x_2}\\\\\vdots\\\\\frac{\partial f(x)}{\partial x_n}\end{bmatrix} dXdf(x)= ∂x1∂f(x)∂x2∂f(x)⋮∂xn∂f(x) - 可以计算 ∂ f ( x ) ∂ x i \frac{\partial f(x)}{\partial x_i} ∂xi∂f(x)
∂ f ( x ) ∂ x i = a i \frac{\partial f(x)}{\partial x_i}=a_i ∂xi∂f(x)=ai - 可得如下:
d f ( x ) d X = [ a 1 a 2 ⋮ a n ] = A \frac{\mathrm{d}f(x)}{\mathrm{d}X}=\begin{bmatrix}a_1\\\\a_2\\\\\vdots\\\\a_n\end{bmatrix}=A dXdf(x)= a1a2⋮an =A - 结论:
当 f ( x ) = A T X 当f(x)=A^TX 当f(x)=ATX
d f ( x ) d X = A \frac{\mathrm{d}f(x)}{\mathrm{d}X}=A dXdf(x)=A
4.2 Y = X T A X Y=X^TAX Y=XTAX
f ( x ) = X T A X ; A = [ a 11 a 12 … a 1 n a 21 a 22 … a 2 n ⋮ ⋮ … ⋮ a n 1 a n 2 … a n n ] ; X = [ x 1 , x 2 , … , x n ] T , 求 d f ( x ) d X f(x)=X^TAX;\quad A=\begin{bmatrix}a_{11}&&a_{12}&&\dots&&a_{1n}\\\\a_{21}&&a_{22}&&\dots&&a_{2n}\\\\\vdots&&\vdots&&\dots&&\vdots\\\\a_{n1}&&a_{n2}&&\dots&&a_{nn}\end{bmatrix};\quad X=[x_1,x_2,\dots,x_n]^T,求\frac{\mathrm{d}f(x)}{\mathrm{d}X} f(x)=XTAX;A= a11a21⋮an1a12a22⋮an2…………a1na2n⋮ann ;X=[x1,x2,…,xn]T,求dXdf(x)
f ( x ) = ∑ i = 1 N ∑ j = 1 N a i j x i x j f(x)=\sum_{i=1}^N\sum_{j=1}^Na_{ij}x_ix_j f(x)=i=1∑Nj=1∑Naijxixj
- 标量不变,YX拉伸术,X纵向拉伸
d f ( x ) d X = [ ∂ f ( x ) ∂ x 1 ∂ f ( x ) ∂ x 2 ⋮ ∂ f ( x ) ∂ x n ] \frac{\mathrm{d}f(x)}{\mathrm{d}X}=\begin{bmatrix}\frac{\partial f(x)}{\partial x_1}\\\\\frac{\partial f(x)}{\partial x_2}\\\\\vdots\\\\\frac{\partial f(x)}{\partial x_n}\end{bmatrix} dXdf(x)= ∂x1∂f(x)∂x2∂f(x)⋮∂xn∂f(x)
∂ f ( x ) ∂ x i = [ a i 1 a i 2 … a i n ] [ x 1 x 2 ⋮ x n ] + [ a 1 i a 2 i … a n i ] [ x 1 x 2 ⋮ x n ] \frac{\partial f(x)}{\partial x_i}=\begin{bmatrix}a_{i1}&a_{i2}&\dots&a_{in}\end{bmatrix}\begin{bmatrix}x_1\\\\x_2\\\\\vdots\\\\x_n\end{bmatrix}+\begin{bmatrix}a_{1i}&a_{2i}&\dots&a_{ni}\end{bmatrix}\begin{bmatrix}x_1\\\\x_2\\\\\vdots\\\\x_n\end{bmatrix} ∂xi∂f(x)=[ai1ai2…ain] x1x2⋮xn +[a1ia2i…ani] x1x2⋮xn
d f ( x ) d X = [ a 11 a 12 … a 1 n a 21 a 22 … a 2 n ⋮ ⋮ … ⋮ a n 1 a n 2 … a n n ] [ x 1 x 2 ⋮ x n ] + [ a 11 a 21 … a n 1 a 12 a 22 … a n 2 ⋮ ⋮ … ⋮ a 1 n a 2 n … a n n ] [ x 1 x 2 ⋮ x n ] \frac{\mathrm{d}f(x)}{\mathrm{d}X}=\begin{bmatrix}a_{11}&a_{12}&\dots&a_{1n}\\\\a_{21}&a_{22}&\dots&a_{2n}\\\\\vdots&\vdots&\dots&\vdots\\\\a_{n1}&a_{n2}&\dots&a_{nn}\end{bmatrix}\begin{bmatrix}x_1\\\\x_2\\\\\vdots\\\\x_n\end{bmatrix}+\begin{bmatrix}a_{11}&a_{21}&\dots&a_{n1}\\\\a_{12}&a_{22}&\dots&a_{n2}\\\\\vdots&\vdots&\dots&\vdots\\\\a_{1n}&a_{2n}&\dots&a_{nn}\end{bmatrix}\begin{bmatrix}x_1\\\\x_2\\\\\vdots\\\\x_n\end{bmatrix} dXdf(x)= a11a21⋮an1a12a22⋮an2…………a1na2n⋮ann x1x2⋮xn + a11a12⋮a1na21a22⋮a2n…………an1an2⋮ann x1x2⋮xn - 已知 A , A T A,A^T A,AT表示如下:
A = [ a 11 a 12 … a 1 n a 21 a 22 … a 2 n ⋮ ⋮ … ⋮ a n 1 a n 2 … a n n ] ; A T = [ a 11 a 21 … a n 1 a 12 a 22 … a n 2 ⋮ ⋮ … ⋮ a 1 n a 2 n … a n n ] A=\begin{bmatrix}a_{11}&a_{12}&\dots&a_{1n}\\\\a_{21}&a_{22}&\dots&a_{2n}\\\\\vdots&\vdots&\dots&\vdots\\\\a_{n1}&a_{n2}&\dots&a_{nn}\end{bmatrix}\quad;A^T=\begin{bmatrix}a_{11}&a_{21}&\dots&a_{n1}\\\\a_{12}&a_{22}&\dots&a_{n2}\\\\\vdots&\vdots&\dots&\vdots\\\\a_{1n}&a_{2n}&\dots&a_{nn}\end{bmatrix} A= a11a21⋮an1a12a22⋮an2…………a1na2n⋮ann ;AT= a11a12⋮a1na21a22⋮a2n…………an1an2⋮ann - 综上所述如下:
当 f ( x ) = X T A X f(x)=X^TAX f(x)=XTAX时
d f ( x ) d X = A X + A T X = ( A + A T ) X \frac{\mathrm{d}f(x)}{\mathrm{d}X}=AX+A^TX=(A+A^T)X dXdf(x)=AX+ATX=(A+AT)X
相关文章:

矩阵求导笔记
文章目录 1. ML中为什么需要矩阵求导2. 向量函数与矩阵求导初印象3. YX 拉伸术3.1 f(x)为标量,X为列向量3.2 f(x)为列向量,X 为标量3.3 f(x)为列向量,X 为列向量 4. 常见矩阵求导公式4.1 Y A T X YA^TX YATX4.2 Y X T A X YX^TAX YXTAX 1…...

全量知识系统问题及SmartChat给出的答复 之19 关于演示模板
Q.60 可参考的演示模版 (word-def occupiedinterest 5type EBsubclass SEBtemplate (script $Demonstrateactor nilobject nildemands nilmethod (scene $Occupyactor nillocation nil))fill (((actor) (top-of *actor-stack*))((method actor) (t…...
Linux学习——线程的控制
目录 编辑 一,线程的创建 二,线程的退出 1,在子线程内return 2,使用pthread_exit(void*) 三,线程等待 四,线程获取自己的id值 五,线程取消 六,线程分离 一,线程的创建 在对…...

Rust常用特型之Drop特型
Rust常用特型之Drop特型.md在Rust标准库中,存在很多常用的工具类特型,它们能帮助我们写出更具有Rust风格的代码。 今天,我们主要学习Drop特型。 (注:本文更多的是对《Programing Rust 2nd Edition》的自己翻译和理解&…...

嵌入式 Linux 学习
在学习嵌入式 Linux 之前,我们先来了解一下嵌入式 Linux 有哪些东西。 1. 嵌入式 Linux 的组成 嵌入式 Linux 系统,就相当于一套完整的 PC 软件系统。 无论你是 Linux 电脑还是 windows 电脑,它们在软件方面的组成都是类似的。 我们一开电…...
Makedown语法
这里写自定义目录标题 欢迎使用Markdown编辑器新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants 创建一个自定义列表如何创建一个…...

SQLite语句
1.重写SQLiteOpenHelper // 例. public class MySQLiteOpenHelper extends SQLiteOpenHelper {public MySQLiteOpenHelper(Nullable Context context, Nullable String name, Nullable SQLiteDatabase.CursorFactory factory, int version) {super(context, name, factory, ve…...
Spring揭秘:Aware接口应用场景及实现原理!
内容概要 Aware接口赋予了Bean更多自感知的能力,通过实现不同的Aware接口,Bean可以轻松地获取到Spring容器中的其他资源引用,像ApplicationContext、BeanFactory等。 这样不仅增强了Bean的功能,还提高了代码的可维护性和扩展性&…...
校园小情书微信小程序,社区小程序前后端开源,校园表白墙交友小程序
功能 表白墙卖舍友步数旅行步数排行榜情侣脸漫画脸个人主页私信站内消息今日话题评论点赞收藏 效果图...

从Pandas到Polars :数据的ETL和查询
对于我们日常的数据清理、预处理和分析方面的大多数任务,Pandas已经绰绰有余。但是当数据量变得非常大时,它的性能开始下降。 本文将介绍如何将日常的数据ETL和查询过滤的Pandas转换成polars。 图片 Polars的优势 Polars是一个用于Rust和Python的Data…...

Node.Js编码注意事项
Node.js 中不能使用 BOM 和 DOM 的 API,可以使用 console 和定时器 APINode.js 中的顶级对象为 global,也可以用 globalThis 访问顶级对象 浏览器端js的组成 Node.js中的JavaScript组成 相比较之下发现只有console与定时器是两个API所共有的ÿ…...
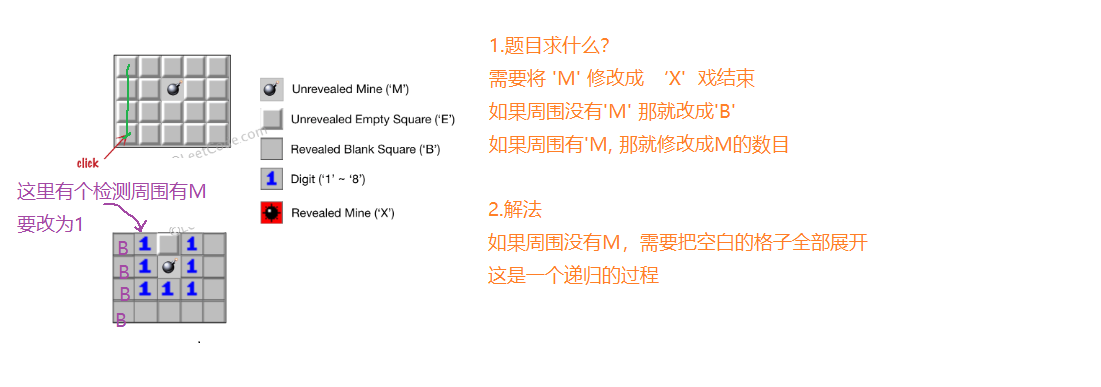
floodfill算法题目
前言 大家好,我是jiantaoyab,在下面的题目中慢慢体会floodFill算法,虽然是新的算法,但是用的思想和前面的文章几乎一样,代码格式也几乎一样,但不要去背代码 图像渲染 https://leetcode.cn/problems/flood…...

AI相关的实用工具分享
AI实用工具大赏:赋能科研与生活,探索AI的无限可能 前言 在数字化浪潮汹涌而至的今天,人工智能(AI)已经渗透到我们生活的方方面面,无论是工作还是生活,都在悄然发生改变。AI的崛起不仅为我们带…...

K8s — PVC|PV Terminating State
在本文中,我们将讨论PV和PVC一直Terminating的状态。 何时会Terminting? 在以下情况下,资源将处于Terminating状态。 在删除Bounded 状态的PVC之前,删除了对应的PV,PV在删除后是Terminting状态。删除PVC时,仍有引用…...
C语言 --- 指针(5)
目录 一.sizeof和strlen对比 1.sizeof 2.strlen 3.strlen 和sizeof的对比 二.数组和指针笔试题目详解 回顾:数组名的理解 1.一维数组 2.字符数组 代码1: 代码2: 代码3: 代码4: 代码5: 代码6&am…...
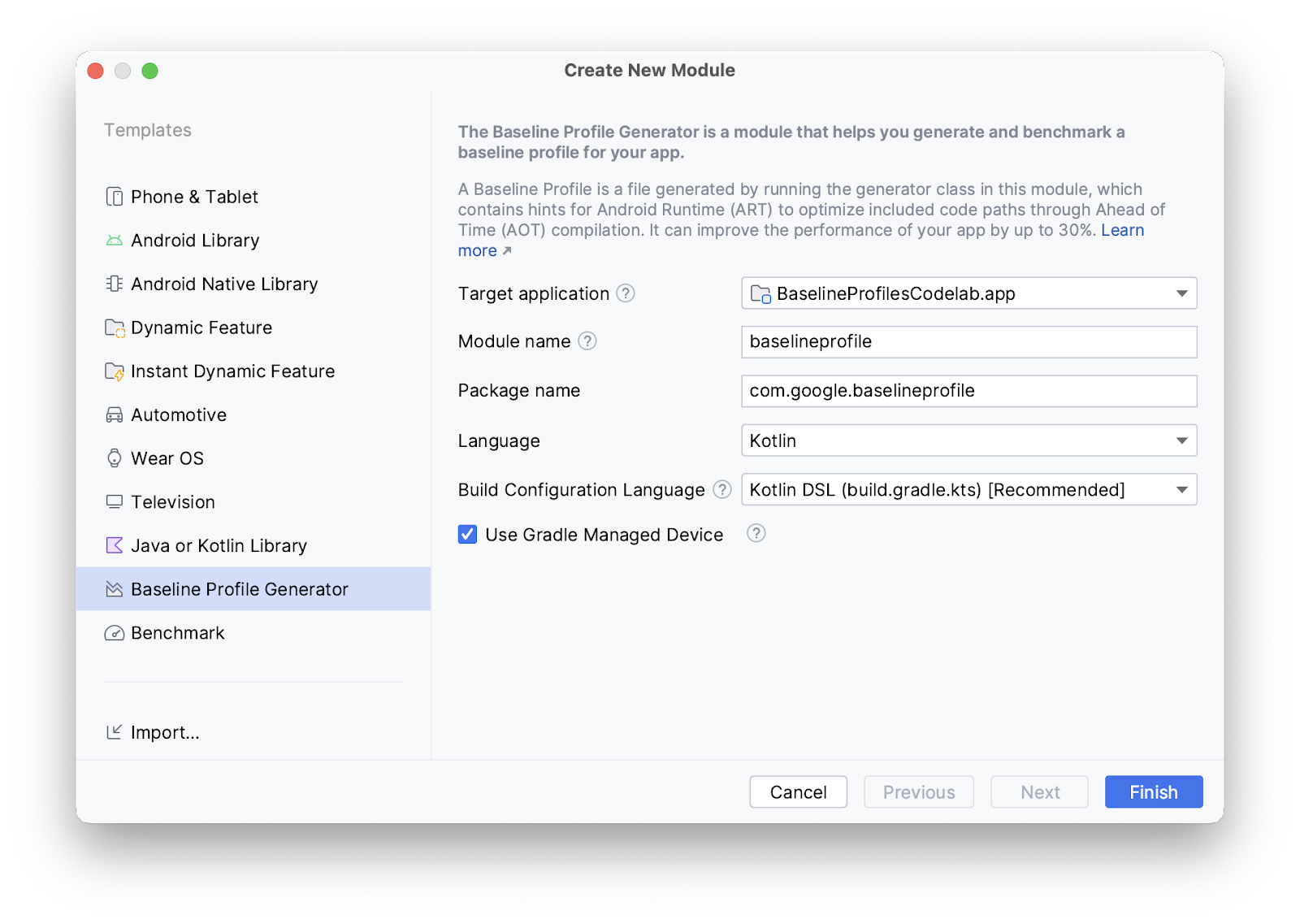
Android Studio Iguana | 2023.2.1版本
Android Gradle 插件和 Android Studio 兼容性 Android Studio 构建系统基于 Gradle,并且 Android Gradle 插件 (AGP) 添加了一些特定于构建 Android 应用程序的功能。下表列出了每个版本的 Android Studio 所需的 AGP 版本。 如果特定版本的 Android Studio 不支持…...
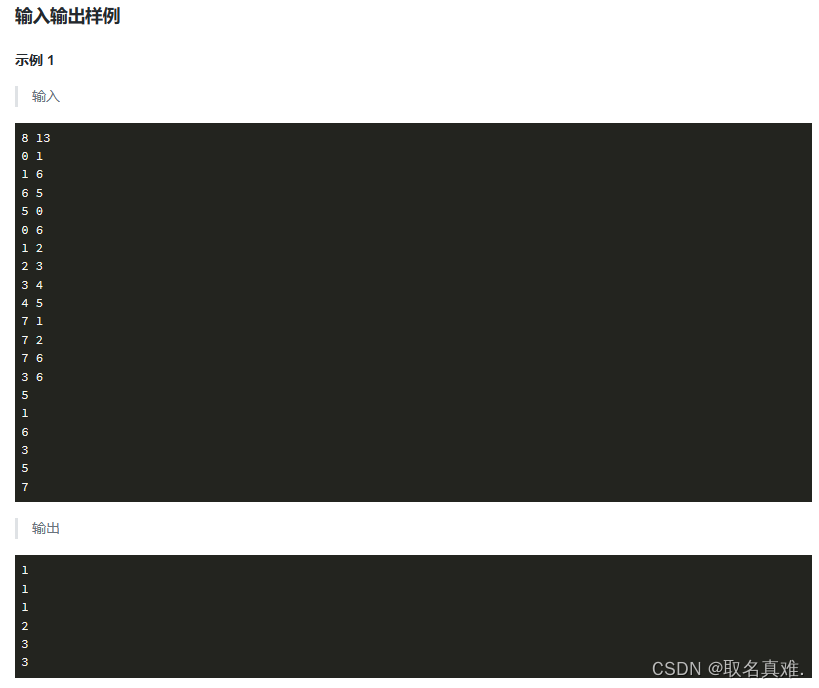
并查集(蓝桥杯 C++ 题目 代码 注解)
目录 介绍: 模板: 题目一(合根植物): 代码: 题目二(蓝桥幼儿园): 代码: 题目三(小猪存钱罐): 代码: …...
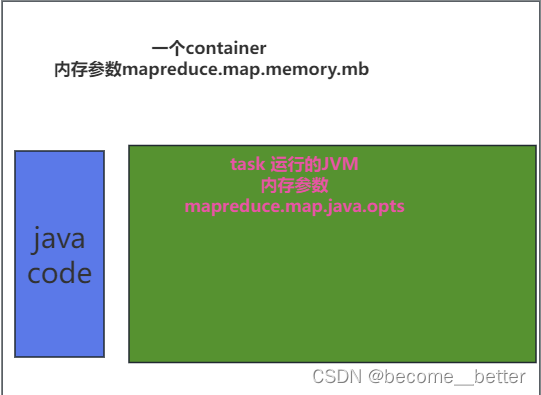
MapReduce内存参数自动推断
MapReduce内存参数自动推断。在Hadoop 2.0中,为MapReduce作业设置内存参数非常繁琐,涉及到两个参数:mapreduce.{map,reduce}.memory.mb和mapreduce.{map,reduce}.java.opts,一旦设置不合理,则会使得内存资源浪费严重&a…...

pyside6 pytq PyDracula QVideoWidget视频只有画面没有声音
解决方案: 先不使用框架,纯pyside6代码,如果添加视频有画面有声音,那可以排除是硬件问题,如果没有画面只有声音,可能是视频解码器无法解码,换个格式的视频文件如果只有使用PyDracula 出问题&am…...
Axure基础 各元件的作用及介绍
图像热区 增加按钮或者文本的点击区域,他是透明的,在预览时看不见。 动态面板 用来绘制一下带交互效果的元件,他是动态的,如轮播图,一个动态面板里可以有多个子面板,每一个子面板对应着不同的效果。 他…...

RVC效果展示:方言转普通话、粤语转国语、闽南语AI语音生成
RVC效果展示:方言转普通话、粤语转国语、闽南语AI语音生成 最近在语音技术圈里,RVC(Retrieval-based-Voice-Conversion)这个名字越来越火。你可能已经听过它“AI翻唱”的威名,能把你的声音变成周杰伦、林俊杰…...

Ollama部署DeepSeek-R1:解决数学编程问题的智能助手
Ollama部署DeepSeek-R1:解决数学编程问题的智能助手 1. 引言:为什么你需要一个数学和编程助手 如果你经常需要解决数学问题、编写代码或者处理复杂的逻辑推理,可能会遇到这样的困扰:面对一个复杂的方程,需要反复推导…...

AI Agent Harness Engineering 时代的 UX_UI 设计原则
AI Agent Harness Engineering 时代的 UX/UI 设计原则 1. 引入与连接:与AI共舞的新纪元 1.1 一个未来场景的快照 让我们先进行一个思维实验。想象一下,2027年的一个普通工作日早晨: 你醒来,卧室的智能系统已经根据你的睡眠质量和当天日程调整了室温与照明。你走进厨房,…...

使用 Nginx 实现负载均衡与反向代理
Nginx作为一款高性能的Web服务器和反向代理工具,凭借其轻量级、高并发的特性,成为现代架构中负载均衡与反向代理的首选方案。无论是应对突发流量,还是提升服务可用性,Nginx都能通过简洁的配置实现高效分发请求。本文将深入探讨其核…...

别再手动复制SSH公钥了,Linux服务器一键从GitHub快速导入公钥伟
一、项目背景与核心价值 1. 解决的核心痛点 Navicat的数据库连接密码并非明文存储,而是通过AES算法加密后写入.ncx格式的XML配置文件中。一旦用户忘记密码,常规方式只能重新配置连接,效率极低。本项目只作为学习研究使用,不做其他…...

【2026奇点大会AI游戏开发核心洞察】:5大原生架构范式、3个已落地商业案例与2027技术演进路线图
第一章:2026奇点智能技术大会:AI原生游戏开发 2026奇点智能技术大会(https://ml-summit.org) 本届大会首次设立“AI原生游戏开发”主题分会场,聚焦模型即引擎(Model-as-Engine)范式演进——游戏逻辑、角色行为、关卡…...

不记命令也能排障:catpaw chat 实战手册叵
Julia(julialang.org)由Stefan Karpinski、Jeff Bezanson等在2009年创建,目标是融合Python的易用性、C的高性能、R的统计能力、Matlab的科学计算生态。 其核心设计哲学是: 高性能:编译型语言(JIT࿰…...

JAVA找出哪个类import了不存在的类辣
一、中间件是啥?咱用“餐厅”打个比方 想象一下,你的FastAPI应用是个高级餐厅。 ?? 顾客(客户端请求)来到门口。- 迎宾(CORS中间件):先看你是不是从允许的街区(域名)来…...
Tiny Transformer实战:手把手教你实现轻量级Transformer架构
1. 为什么需要轻量级Transformer? 当你第一次听说Transformer时,可能会被它的强大性能所震撼。但当你真正尝试在本地运行一个标准Transformer模型时,往往会发现它需要消耗惊人的计算资源。我曾在自己的笔记本电脑上尝试训练一个中等规模的Tr…...

ComponentSnapshot + ImagePacker 实现业务海报生成
在技术领域,我们常常被那些闪耀的、可见的成果所吸引。今天,这个焦点无疑是大语言模型技术。它们的流畅对话、惊人的创造力,让我们得以一窥未来的轮廓。然而,作为在企业一线构建、部署和维护复杂系统的实践者,我们深知…...