【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 6
【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 6
文章目录
- 前言
- 一、创建controller相关
- 二、逻辑分析
- RRBotModularJoint类解析
- ros2_control.xacro解析
- 三、测试运行
- 测试forward_position_controller
- 总结
前言
本篇文章在上篇文章的基础上主要讲解双轴机器人驱动怎么编写双轴机器各个轴风别用不同的驱动器控制1,实际应用场景可能是机器人地轨与机械臂控制器是两个控制单元,需要分别实现底层驱动控制。
对于Hardware Interfaces常见接口可见《ROS2 Control hardware_interface说明》。
一、创建controller相关
cd ~/ros2_control_demosros2 pkg create --build-type ament_cmake ros2_control_demo_example_6# 文件结构
$ tree ros2_control_demo_example_6
ros2_control_demo_example_6
├── CMakeLists.txt
├── bringup
│ ├── config
│ │ └── rrbot_modular_actuators.yaml
│ └── launch
│ └── rrbot_modular_actuators.launch.py
├── description
│ ├── launch
│ │ └── view_robot.launch.py
│ ├── ros2_control
│ │ └── rrbot_modular_actuators.ros2_control.xacro
│ └── urdf
│ └── rrbot_modular_actuators.urdf.xacro
├── hardware
│ ├── include
│ │ └── ros2_control_demo_example_6
│ │ ├── rrbot_actuator.hpp
│ │ └── visibility_control.h
│ └── rrbot_actuator.cpp
├── package.xml
└── ros2_control_demo_example_6.xml10 directories, 11 files
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3"><name>ros2_control_demo_example_6</name><version>0.0.0</version><description>TODO: Package description</description><maintainer email="lilinxin75@gmail.com">Bing Lee</maintainer><url type="website">https://blog.csdn.net/Bing_Lee</url><license>TODO: License declaration</license><buildtool_depend>ament_cmake</buildtool_depend><depend>hardware_interface</depend><depend>pluginlib</depend><depend>rclcpp</depend><depend>rclcpp_lifecycle</depend><exec_depend>controller_manager</exec_depend><exec_depend>forward_command_controller</exec_depend><exec_depend>joint_state_broadcaster</exec_depend><exec_depend>joint_state_publisher_gui</exec_depend><exec_depend>robot_state_publisher</exec_depend><exec_depend相关文章:

【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 6
【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 6 文章目录 前言一、创建controller相关二、逻辑分析RRBotModularJoint类解析ros2_control.xacro解析三、测试运行测试forward_position_controller总结前言 本篇文章在上篇文章的基础上主要讲解双轴机器人驱…...
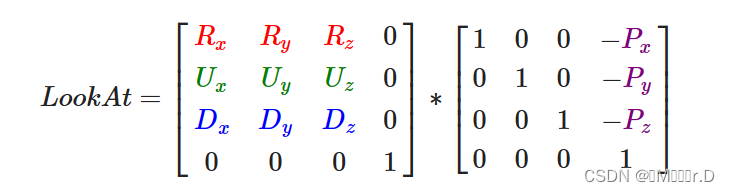
Learn OpenGL 07 摄像机
定义摄像机参数 glm::vec3 cameraPos glm::vec3(0.0f, 0.0f, 3.0f);//摄像机位置glm::vec3 cameraTarget glm::vec3(0.0f, 0.0f, 0.0f);glm::vec3 cameraDirection glm::normalize(cameraPos - cameraTarget);//摄像机方向,指向z轴正方向 glm::vec3 up glm::vec…...
Linux系统部署火狐浏览器结合内网穿透实现公网访问
目录 前言 1. 部署Firefox 2. 本地访问Firefox 3. Linux安装Cpolar 4. 配置Firefox公网地址 5. 远程访问Firefox 6. 固定Firefox公网地址 7. 固定地址访问Firefox 结语 前言 作者简介: 懒大王敲代码,计算机专业应届生 今天给大家聊聊Linux系统…...
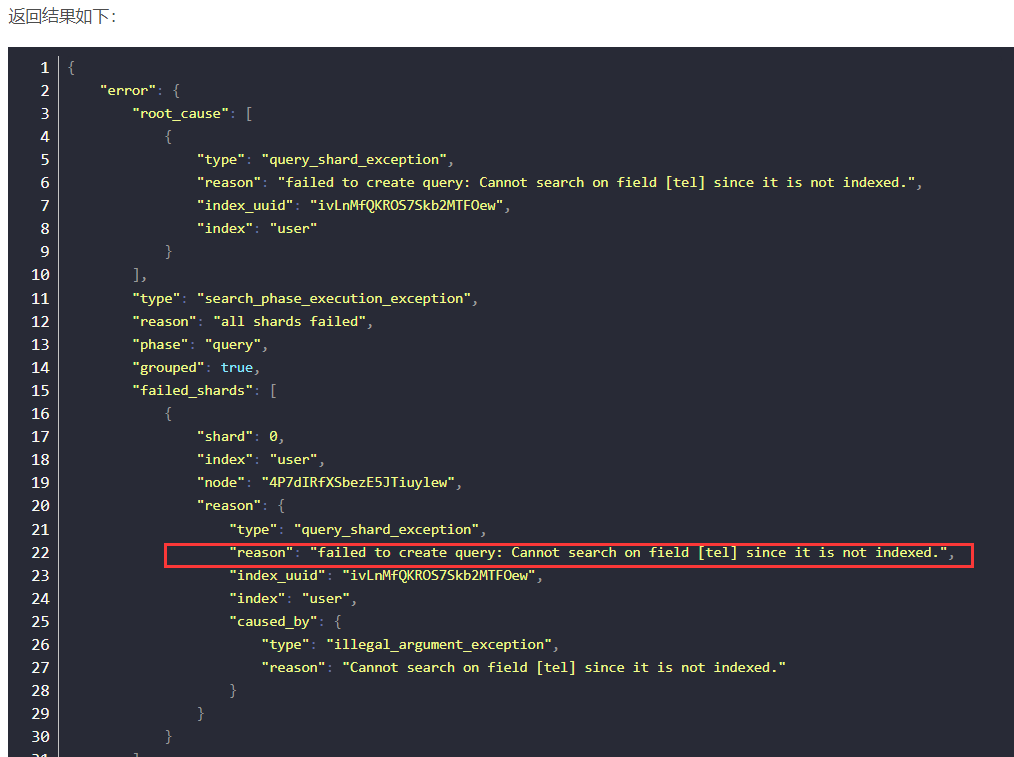
Elastic Stack--05--聚合、映射mapping
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 1.聚合(aggregations)基本概念桶(bucket)度量(metrics) 案例 11. 接下来按price字段进行分组:2. 若想对所…...
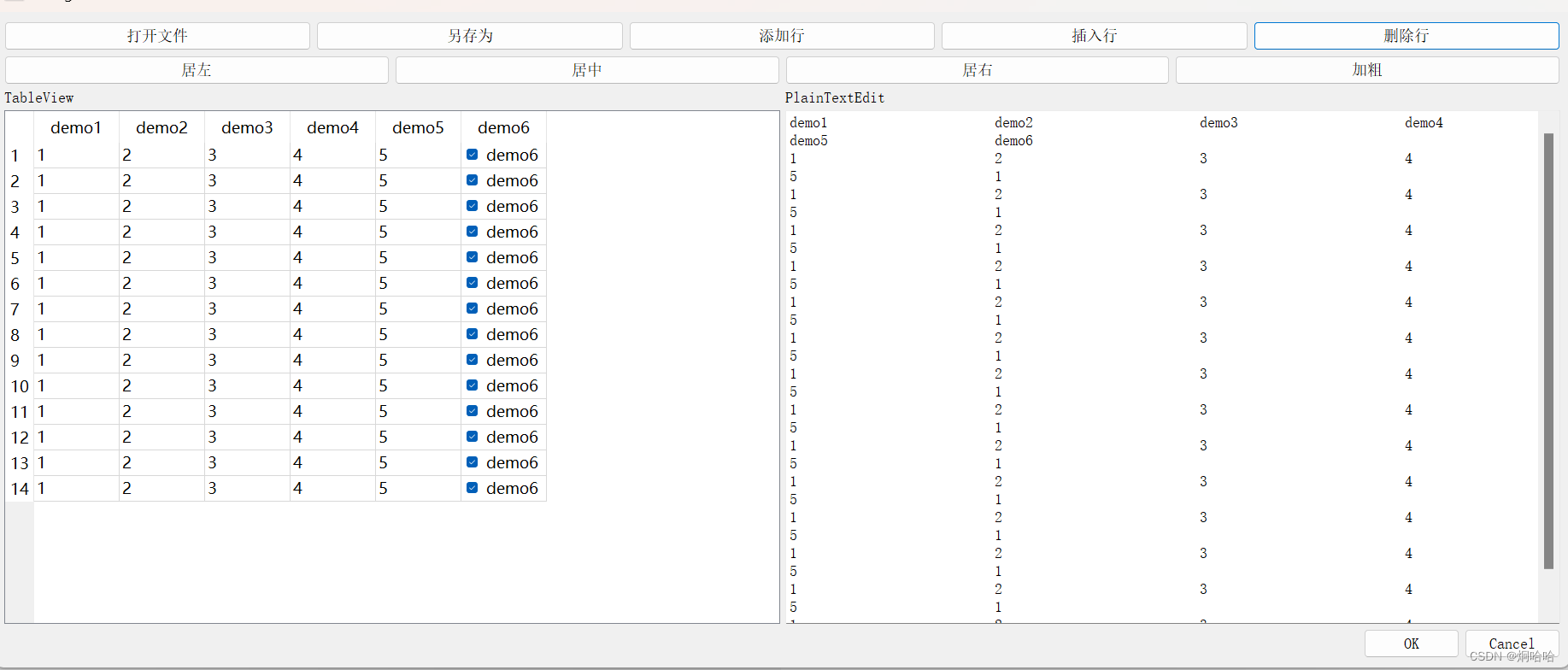
【嵌入式——QT】Model/View
【嵌入式——QT】Model/View 基本原理数据模型视图组件代理Model/View结构的一些概念QFileSystemModelQStringListModelQStandardItemModel自定义代理 基本原理 GUI应用程序的一个很重要的功能是由用户在界面上编辑和修改数据,典型的如数据库应用程序,数…...

向量化编程书籍推荐
文章目录 1. 书籍清单 1. 书籍清单 《Linear Algebra and Its Applications》 by Gilbert Strang 这本书是线性代数的经典教材,线性代数是向量化编程的基础。它涵盖了向量、矩阵、线性变换等内容,对理解向量化编程的数学概念非常有帮助《NumPy Beginner…...

算法D43 | 动态规划5 | 1049. 最后一块石头的重量 II 494. 目标和 474.一和零
1049. 最后一块石头的重量 II 本题就和 昨天的 416. 分割等和子集 很像了,可以尝试先自己思考做一做。 视频讲解:动态规划之背包问题,这个背包最多能装多少?LeetCode:1049.最后一块石头的重量II_哔哩哔哩_bilibili 代…...
设计模式—桥接模式
定义: 桥接模式是将抽象部分与它的实现部分分离,使它们都可以独立地变化。它是一种对象结构型模式,又称为柄体(Handle and Body)模式或接口(Interfce)模式。 本章代码:小麻雀icknn/设计模式练习 - Gitee.com 结构: 抽象化(Abstraction)角色:…...

伊萨卡训练代码
我们建议创建并激活 conda 环境,以确保在下面安装正确的软件包版本的干净环境。 # Optional but recommended: conda create -n ithaca python3.9 conda activate ithaca 克隆此存储库并进入其根目录。通过以下方式安装完整的 ithaca 依赖项(包括训练&am…...

视频产品介绍:AS-VCVR-N多协议视频接入网关
目 录 一、产品概述 (一)非标设备接入 (二)信令流转换 (三)媒体流转发 二、网关特性 三、技术参数 一、产品概述 视频接入网关服务是终端用户与视频源的传输枢纽,实现把前端不同…...
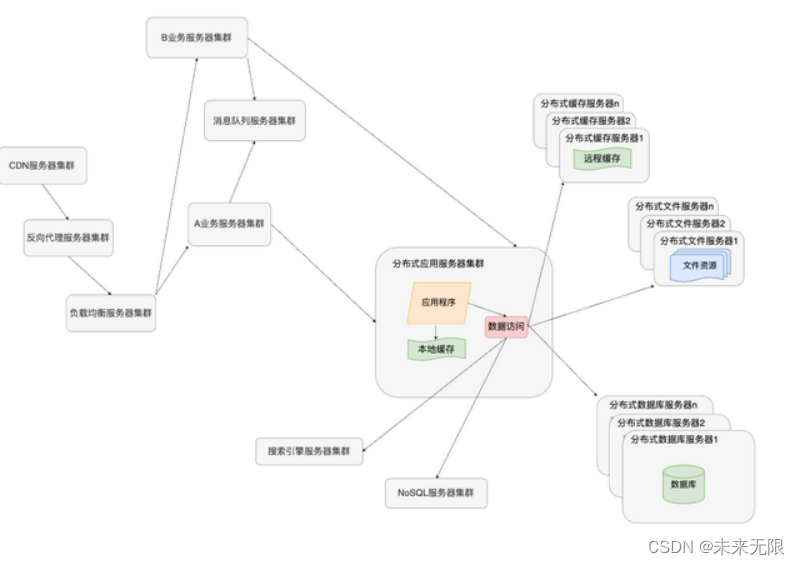
大型网站架构演化总结
本文图解大型网站架构演化。 目录 1、单一应用服务阶段 2、应用与数据服务分离阶段 3、利用缓存提高性能阶段 4、应用服务集群阶段 5、数据库读写分离阶段 6、反向代理与CDN加速阶段 7、分布式数据库阶段 8、 NoSQL与搜索引擎阶段 9、业务拆分阶段 10、分布式服务阶…...

5G智能制造纺织工厂数字孪生可视化平台,推进纺织行业数字化转型
5G智能制造纺织工厂数字孪生可视化平台,推进纺织行业数字化转型。纺织工业作为传统制造业的重要组成部分,面临着转型升级的紧迫需求。随着5G技术的快速发展,智能制造成为纺织工业转型升级的重要方向。数字孪生可视化平台作为智能制造的核心技…...
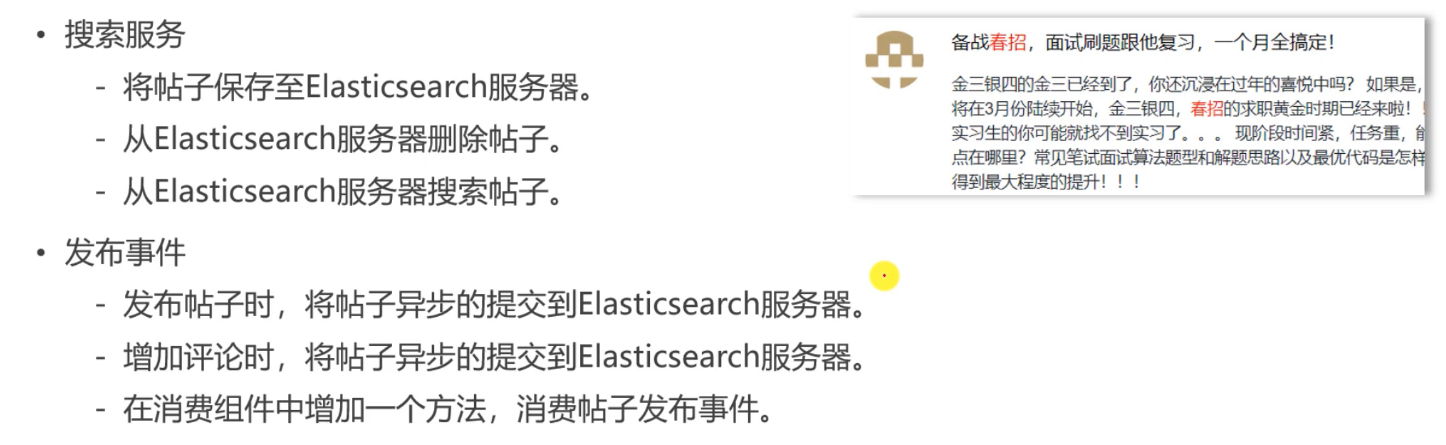
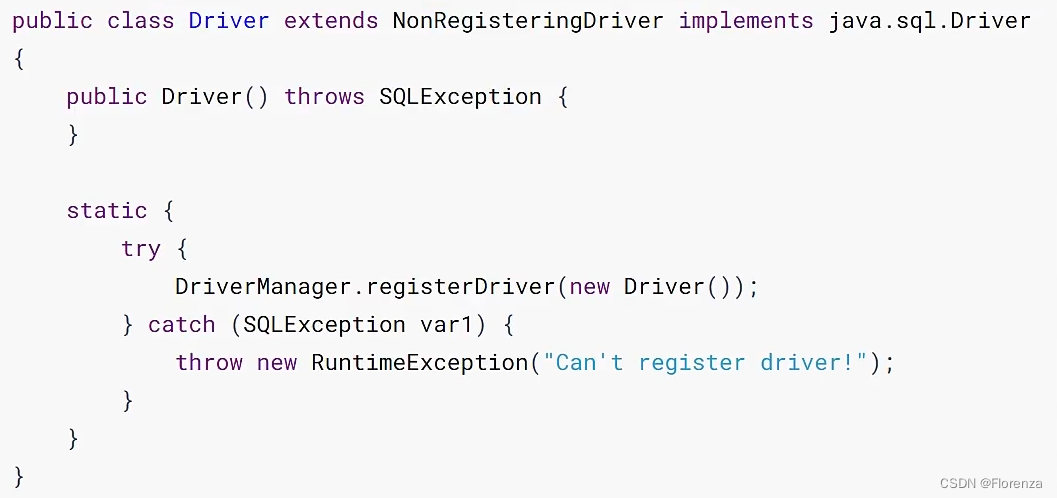
仿牛客网项目---Elasticsearch分布式搜索引擎
1.什么是ElasticSearch分布式搜索引擎? Elasticsearch是一个开源的分布式搜索引擎,提供实时的、高可用性的搜索和分析解决方案。它支持快速索引和搜索大规模数据,具有分布式架构、RESTful API、基于JSON的查询语言等功能,适用于各…...

macbook pro 2018 安装 arch linux 双系统
文章目录 友情提醒关于我的 mac在 mac 上需要提前做的事情复制 wifi 驱动 在 linux 上的操作还原 wifi 驱动连接 wifi 网络磁盘分区制作文件系统挂载分区 使用 archinstall 来安装 arch linux遗留问题 友情提醒 安装 archl linux 的时候,mac 的键盘是没法用的&#…...

虚拟机安装CentOS教学,超详细一步安装到底!
首先将Centos的镜像文件进行下载,随后再进行安装配置: https://mirrors.tuna.tsinghua.edu.cn/centos-vault/7.8.2003/isos/x86_64/CentOS-7-x86_64-DVD-2003.iso 1.打开VMware,新建虚拟机,选择典型安装,点击下一步 2.选择稍…...

“2024杭州智慧城市及安防展会”将于4月在杭州博览中心盛大召开
2024杭州国际智慧城市及安防展览会,将于4月24日在杭州国际博览中心盛大开幕。这场备受瞩目的盛会,不仅汇集了全球智慧城市与安防领域的顶尖企业,更是展示最新技术、交流创新理念的重要平台。近日,从组委会传来消息,展会…...

【C++庖丁解牛】模拟实现STL的string容器(最后附源码)
📙 作者简介 :RO-BERRY 📗 学习方向:致力于C、C、数据结构、TCP/IP、数据库等等一系列知识 📒 日后方向 : 偏向于CPP开发以及大数据方向,欢迎各位关注,谢谢各位的支持 目录 1.vs和g下string结构…...
不要在代码中随便使用try...catch了
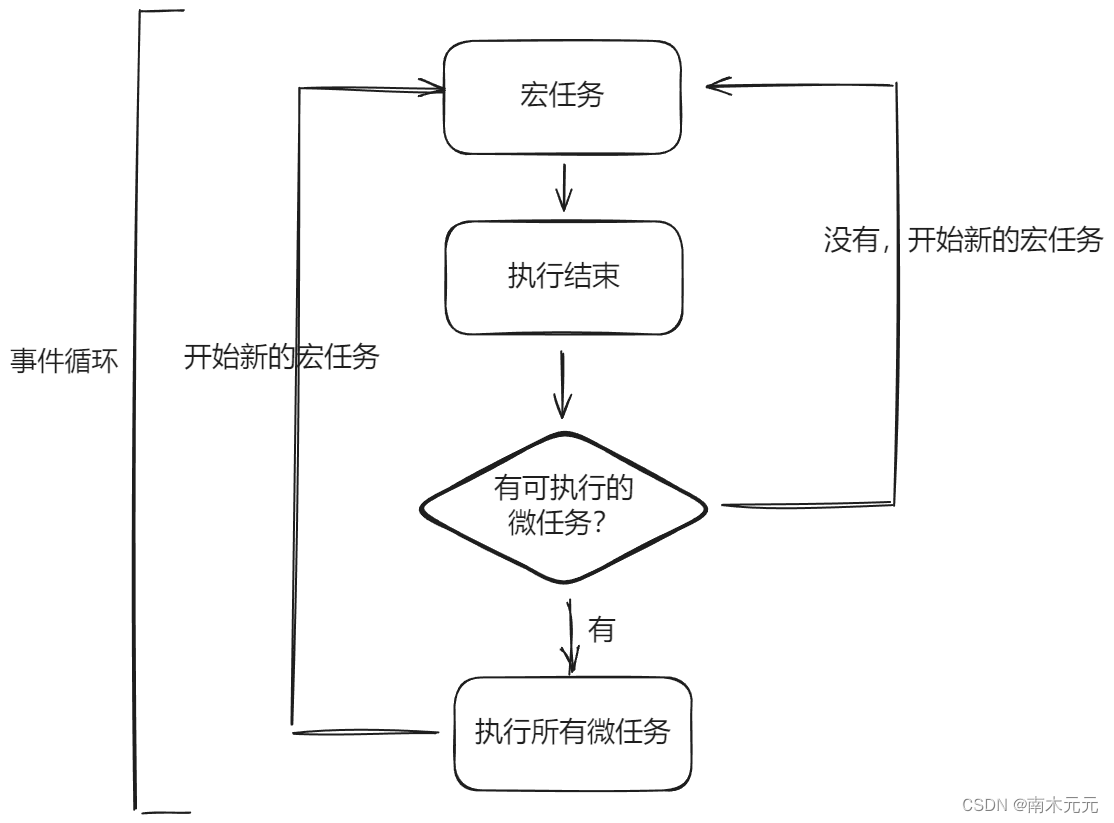
前言 📫 大家好,我是南木元元,热爱技术和分享,欢迎大家交流,一起学习进步! 🍅 个人主页:南木元元 目录 背景 js中的try...catch try...catch运行机制 js的事件循环机制 try...c…...
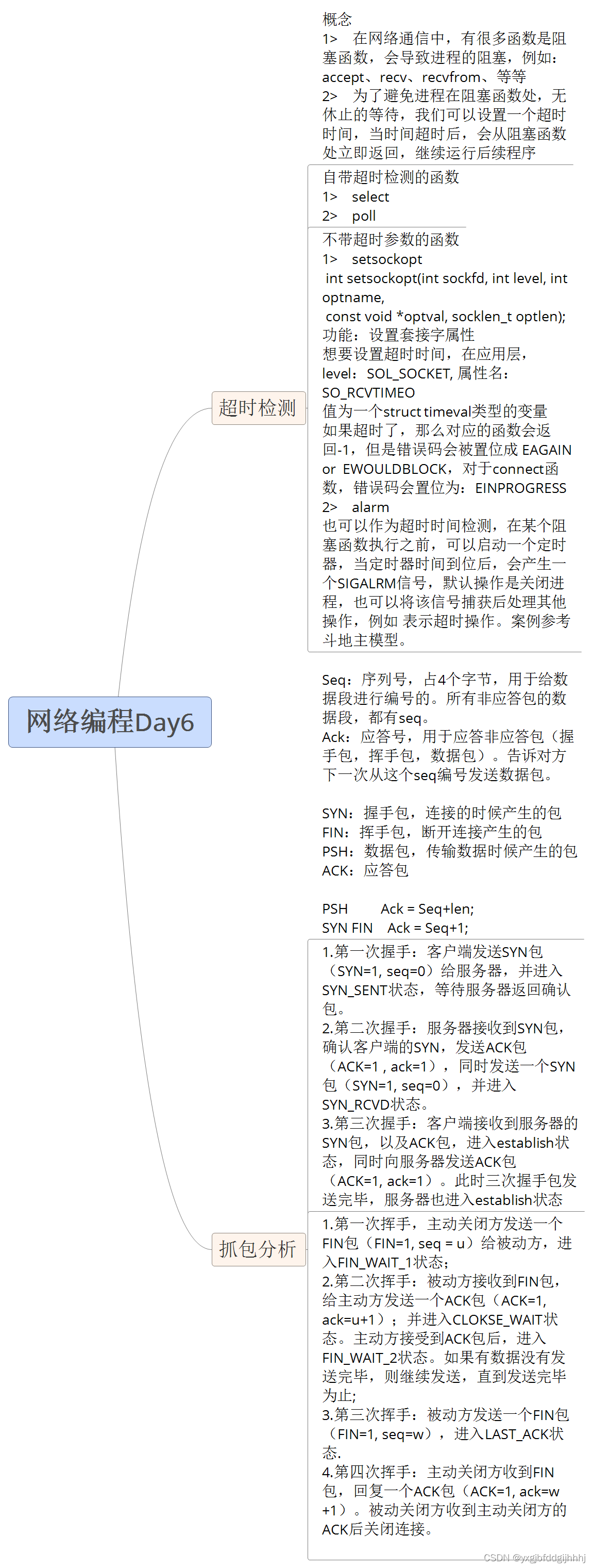
网络编程(3/6)
使用C语言完成数据库的增删改 #include<myhead.h> int do_add(sqlite3 *ppDb) {int numb;char name[50];int salary;printf("请输入员工信息:工号、姓名、薪水\n");scanf("%d %s %d",&numb,name,&salary);char sql[128];char *e…...
(day 2)JavaScript学习笔记(基础之变量、常量和注释)
概述 这是我的学习笔记,记录了JavaScript的学习过程,我是有一些Python基础的,因此在学习的过程中不自觉的把JavaScript的代码跟Python代码做对比,以便加深印象。我本人学习软件开发纯属个人兴趣,大学所学的专业也非软件…...

使用Docker快速部署Sentinel Dashboard:从构建到运行的全流程指南
1. 为什么选择Docker部署Sentinel Dashboard 第一次接触Sentinel Dashboard时,我尝试过直接在服务器上运行jar包。结果遇到各种环境问题:JDK版本不匹配、端口冲突、时区设置错误...折腾半天都没跑起来。后来改用Docker部署,整个过程变得异常简…...

一文搞懂:如何用 Spring AI 搭建 MCP Server 和 Client
MCP 概述 Model Context Protocol(MCP) 是一套标准化协议,用于实现 AI 模型与外部工具或资源的交互。它提供一致的接口,使 AI 模型能够访问数据库、API、文件系统及其他外部服务,同时支持多种传输机制,满足…...

5分钟掌握艾尔登法环存档迁移工具:终极免费解决方案
5分钟掌握艾尔登法环存档迁移工具:终极免费解决方案 【免费下载链接】EldenRingSaveCopier 项目地址: https://gitcode.com/gh_mirrors/el/EldenRingSaveCopier 艾尔登法环存档迁移工具是一款专为《艾尔登法环》玩家设计的专业存档管理软件,能够…...

Lumafly:让空洞骑士模组管理变得像呼吸一样简单
Lumafly:让空洞骑士模组管理变得像呼吸一样简单 【免费下载链接】Lumafly A cross platform mod manager for Hollow Knight written in Avalonia. 项目地址: https://gitcode.com/gh_mirrors/lu/Lumafly 还在为空洞骑士模组安装的繁琐流程而烦恼吗…...

5个场景掌握KoboldAI:从零开始构建你的本地AI写作助手
5个场景掌握KoboldAI:从零开始构建你的本地AI写作助手 【免费下载链接】KoboldAI-Client For GGUF support, see KoboldCPP: https://github.com/LostRuins/koboldcpp 项目地址: https://gitcode.com/gh_mirrors/ko/KoboldAI-Client 在数字创作的时代&#x…...

从硬件原理到软件中断:深入解析耳机插拔与按键检测的实现逻辑
1. 耳机接口的硬件基础:从三段式到四段式 第一次拆解耳机接口时,我被那些细小的金属环搞晕了头。后来发现,这些看似简单的结构藏着精妙的电路设计。最常见的3.5mm耳机接口分为三段式和四段式两种,就像USB-A和Type-C的区别…...

PowerToys终极指南:5个技巧解决Windows效率工具常见问题
PowerToys终极指南:5个技巧解决Windows效率工具常见问题 【免费下载链接】PowerToys Microsoft PowerToys is a collection of utilities that supercharge productivity and customization on Windows 项目地址: https://gitcode.com/GitHub_Trending/po/PowerTo…...
)
Python爬虫新手必看:Image-Downloader搭配ChromeDriver的完整配置指南(附常见报错解决)
Python爬虫实战:Image-Downloader与ChromeDriver的深度配置手册 当你第一次尝试用Python爬取网页图片时,是否曾被各种环境配置问题搞得焦头烂额?作为过来人,我完全理解那种看着满屏报错信息却无从下手的挫败感。本文将带你深入理解…...
)
LLM服务版本管理实战手册(2024年头部AI团队内部流出版)
第一章:大模型工程化版本管理与回滚机制 2026奇点智能技术大会(https://ml-summit.org) 大模型工程化中的版本管理远超传统软件的 Git commit 粒度,需同时追踪模型权重、Tokenizer 配置、训练超参、推理服务镜像及依赖环境快照。单一 SHA 哈希已无法承载…...

步进电机电流闭环控制软件:自动计算电流环kp和ki,高频率PWM,支持modbus通信,位置与...
步进电机电流闭环控制软件: 电流闭环,电流环kp和ki自动计算; PWM频率,电流环计算频率,16kHz; modbus通信; 位置模式和速度模式。(面向现场工程师与维护人员)0 前言 这份文…...