【智能算法】蜻蜓算法(DA)原理及实现
目录
- 1.背景
- 2.算法原理
- 2.1算法思想
- 2.2算法过程
- 3.代码实现
- 4.参考文献
1.背景
2016年,Mirjalili受到蜻蜓静态和动态集群行为启发,提出了蜻蜓算法(Dragonfly algorithm, DA)。
2.算法原理
2.1算法思想
蜻蜓集群有两种行为目的:狩猎(静态集群)和迁徙(动态集群)。静态集群中,蜻蜓分成小群捕猎,局部移动和突然飞行路径变化是其特征。动态集群则是大量蜻蜓在单一方向上长距离迁徙。这两种行为类似于元启发式优化中的探索和开发利用阶段,静态集群探索不同区域,而动态集群利用大群体沿着一个方向飞行。
2.2算法过程
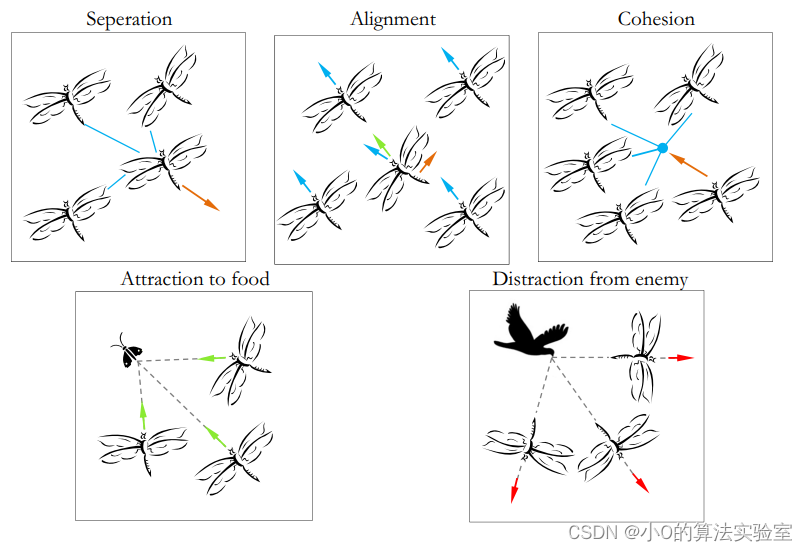
群体的行为遵循三个基本原则:
- 分离(Separation):指个体在邻域内静态地避免与其他个体碰撞
- 对齐(Alignment):表示个体的速度与邻域内其他个体的速度匹配
- 凝聚(Cohesion):指个体朝向邻域质心的趋势
分离:
S i = − ∑ j = 1 N X i − X j S_i=-\sum_{j=1}^NX_i-X_j Si=−j=1∑NXi−Xj
其中, X j X_j Xj表示第 i i i只蜻蜓领域内其他蜻蜓, S i S_i Si表示第 i i i只蜻蜓分离位置向量。
对齐:
A i = ∑ j = 1 N V j N A_{i}=\frac{\sum_{j=1}^{N}V_{j}}{N} Ai=N∑j=1NVj
其中, A i A_i Ai表示第 i i i只蜻蜓与领域内其他蜻蜓对齐的位置向量。
凝聚:
C i = ∑ j = 1 N X j N − X i C_i=\frac{\sum_{j=1}^NX_j}N-X_i Ci=N∑j=1NXj−Xi
其中, C i C_i Ci示第 i i i只蜻蜓凝聚时的位置向量。
寻找食物:
F i = X + − X i F_i=X^+-X_i Fi=X+−Xi
其中, X + X^+ X+表示猎物位置。
躲避天敌:
E i = X − + X i E_i=X^-+X_i Ei=X−+Xi
其中, X − X^- X−表示天敌位置。
位置更新:
Δ X t + 1 = ( s S i + a A i + c C i + f F i + e E i ) + w Δ X t X t + 1 = X t + Δ X t + 1 \Delta X_{t+1}=(sS_i+aA_i+cC_i+fF_i+eE_i)+w\Delta X_t \\ X_{t+1}=X_t+\Delta X_{t+1} ΔXt+1=(sSi+aAi+cCi+fFi+eEi)+wΔXtXt+1=Xt+ΔXt+1
式中参数均为权重因子。
为了提高DA随机性和探索能力,当没有邻近解时,它们需要在搜索空间中进行Lévy飞行:
X t + 1 = X t + L e ˊ vy ( d ) × X t X_{t+1}=X_t+\text{Lévy}(d)\times X_t Xt+1=Xt+Leˊvy(d)×Xt
Lévy函数表述如下(Mantegna算法):
L e ˊ vy ( x ) = 0.01 × r 1 × σ ∣ r 2 ∣ 1 β σ = ( Γ ( 1 + β ) × sin ( π β 2 ) Γ ( 1 + β 2 ) × β × 2 ( β − 1 2 ) ) 1 / β \text{Lévy}(x)=0.01\times\frac{r_1\times\sigma}{|r_2|^{\frac1\beta}} \\ \sigma=\left(\frac{\Gamma(1+\beta)\times\sin\left(\frac{\pi\beta}{2}\right)}{\Gamma\left(\frac{1+\beta}{2}\right)\times\beta\times2^{\left(\frac{\beta-1}{2}\right)}}\right)^{1/\beta} Leˊvy(x)=0.01×∣r2∣β1r1×σσ= Γ(21+β)×β×2(2β−1)Γ(1+β)×sin(2πβ) 1/β
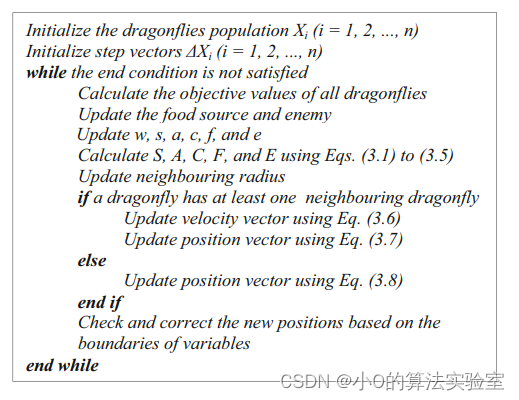
伪代码:
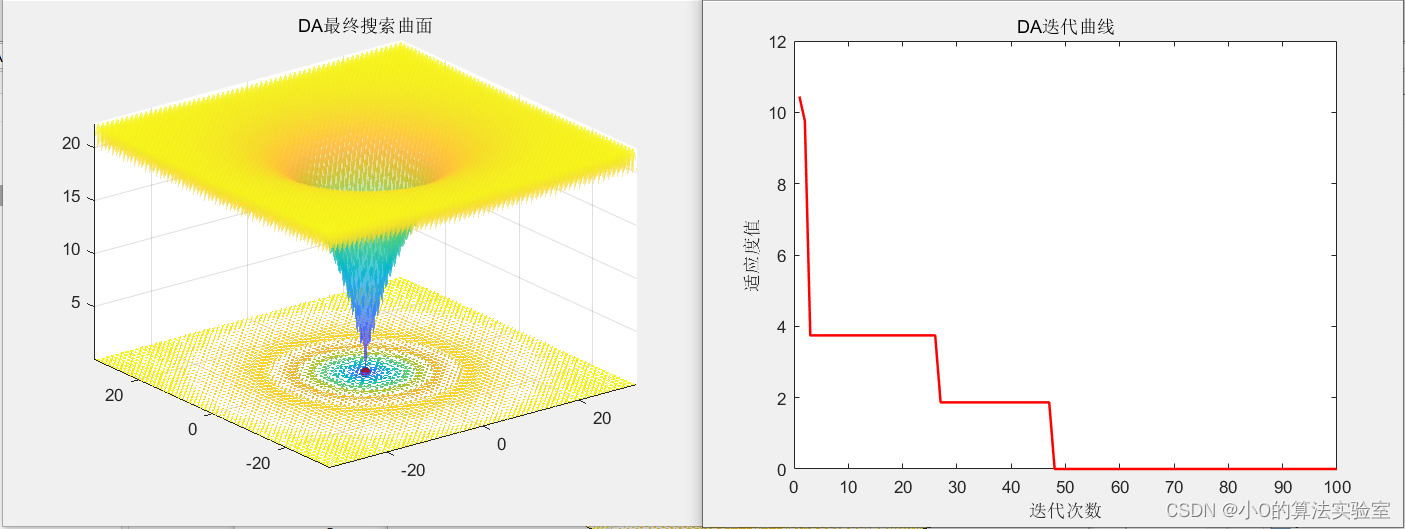
3.代码实现
% 蜻蜓优化算法
function [Best_pos,Best_fitness,Iter_curve,History_pos, History_best]=DA(pop, dim, ub,lb, fobj, maxIter)
%input
%pop 种群数量
%dim 问题维数
%ub 变量上边界
%lb 变量下边界
%fobj 适应度函数
%maxIter 最大迭代次数
%output
%Best_pos 最优位置
%Best_fitness 最优适应度值
%Iter_curve 每代最优适应度值
%History_pos 每代种群位置
%History_best 每代最优个体位置
%% 记录
Iter_curve=zeros(1,maxIter);
r=(ub-lb)/10;
Delta_max=(ub-lb)/10;
Food_fitness=inf;
Food_pos=zeros(dim,1);
Enemy_fitness=-inf;
Enemy_pos=zeros(dim,1);
%% 初始化
X=initialization(pop,dim,ub,lb);
Fitness=zeros(1,pop);
DeltaX=initialization(pop,dim,ub,lb);
%% 迭代
for iter=1:maxIterr=(ub-lb)/4+((ub-lb)*(iter/maxIter)*2);w=0.9-iter*((0.9-0.4)/maxIter);my_c=0.1-iter*((0.1-0)/(maxIter/2));if my_c<0my_c=0;ends=2*rand*my_c; % Seperation weighta=2*rand*my_c; % Alignment weightc=2*rand*my_c; % Cohesion weightf=2*rand; % Food attraction weighte=my_c; % Enemy distraction weightfor i=1:pop %Calculate all the objective values firstFitness(1,i)=fobj(X(:,i)');if Fitness(1,i)<Food_fitnessFood_fitness=Fitness(1,i);Food_pos=X(:,i);endif Fitness(1,i)>Enemy_fitnessif all(X(:,i)<ub') && all( X(:,i)>lb')Enemy_fitness=Fitness(1,i);Enemy_pos=X(:,i);endendendfor i=1:popindex=0;neighbours_no=0;clear Neighbours_DeltaXclear Neighbours_Xfor j=1:popDist2Enemy=distance(X(:,i),X(:,j));if (all(Dist2Enemy<=r) && all(Dist2Enemy~=0))index=index+1;neighbours_no=neighbours_no+1;Neighbours_DeltaX(:,index)=DeltaX(:,j);Neighbours_X(:,index)=X(:,j);endend% 分离% Eq. (3.1)S=zeros(dim,1);if neighbours_no>1for k=1:neighbours_noS=S+(Neighbours_X(:,k)-X(:,i));endS=-S;elseS=zeros(dim,1);end% 对齐% Eq. (3.2)if neighbours_no>1A=(sum(Neighbours_DeltaX')')/neighbours_no;elseA=DeltaX(:,i);end% 凝聚% Eq. (3.3)if neighbours_no>1C_temp=(sum(Neighbours_X')')/neighbours_no;elseC_temp=X(:,i);endC=C_temp-X(:,i);% 寻找食物% Eq. (3.4)Dist2Food=distance(X(:,i),Food_pos(:,1));if all(Dist2Food<=r)F=Food_pos-X(:,i);elseF=0;end% 躲避天敌% Eq. (3.5)Dist2Enemy=distance(X(:,i),Enemy_pos(:,1));if all(Dist2Enemy<=r)Enemy=Enemy_pos+X(:,i);elseEnemy=zeros(dim,1);endfor tt=1:dimif X(tt,i)>ub(tt)X(tt,i)=lb(tt);DeltaX(tt,i)=rand;endif X(tt,i)<lb(tt)X(tt,i)=ub(tt);DeltaX(tt,i)=rand;endendif any(Dist2Food>r)if neighbours_no>1for j=1:dimDeltaX(j,i)=w*DeltaX(j,i)+rand*A(j,1)+rand*C(j,1)+rand*S(j,1);if DeltaX(j,i)>Delta_max(j)DeltaX(j,i)=Delta_max(j);endif DeltaX(j,i)<-Delta_max(j)DeltaX(j,i)=-Delta_max(j);endX(j,i)=X(j,i)+DeltaX(j,i);endelse% Eq. (3.8)X(:,i)=X(:,i)+Levy(dim)'.*X(:,i);DeltaX(:,i)=0;endelsefor j=1:dim% Eq. (3.6)DeltaX(j,i)=(a*A(j,1)+c*C(j,1)+s*S(j,1)+f*F(j,1)+e*Enemy(j,1)) + w*DeltaX(j,i);if DeltaX(j,i)>Delta_max(j)DeltaX(j,i)=Delta_max(j);endif DeltaX(j,i)<-Delta_max(j)DeltaX(j,i)=-Delta_max(j);endX(j,i)=X(j,i)+DeltaX(j,i);end endFlag4ub=X(:,i)>ub';Flag4lb=X(:,i)<lb';X(:,i)=(X(:,i).*(~(Flag4ub+Flag4lb)))+ub'.*Flag4ub+lb'.*Flag4lb;endBest_fitness=Food_fitness;Best_pos=Food_pos;Iter_curve(iter)=Best_fitness;History_pos{iter} = X;History_best{iter} = Best_pos;
end
end
%% 欧式距离
function o = distance(a,b)for i=1:size(a,1)o(1,i)=sqrt((a(i)-b(i))^2);
end
end
%% 位置初始化
function Positions=initialization(SearchAgents_no,dim,ub,lb)Boundary_no= size(ub,2); if Boundary_no==1ub_new=ones(1,dim)*ub;lb_new=ones(1,dim)*lb;
elseub_new=ub;lb_new=lb;
end
for i=1:dimub_i=ub_new(i);lb_i=lb_new(i);Positions(:,i)=rand(SearchAgents_no,1).*(ub_i-lb_i)+lb_i;
endPositions=Positions';
end
%% Levy飞行
function o=Levy(d)beta=3/2;
%Eq. (3.10)
sigma=(gamma(1+beta)*sin(pi*beta/2)/(gamma((1+beta)/2)*beta*2^((beta-1)/2)))^(1/beta);
u=randn(1,d)*sigma;
v=randn(1,d);
step=u./abs(v).^(1/beta);% Eq. (3.9)
o=0.01*step;
end
4.参考文献
[1] Mirjalili S. Dragonfly algorithm: a new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems[J]. Neural computing and applications, 2016, 27: 1053-1073.
[2] Mantegna RN. Fast, accurate algorithm for numerical simulation of Lévy stable stochastic process. Phys Rev E 1994;49(5):4677–83.
相关文章:
【智能算法】蜻蜓算法(DA)原理及实现
目录 1.背景2.算法原理2.1算法思想2.2算法过程 3.代码实现4.参考文献 1.背景 2016年,Mirjalili受到蜻蜓静态和动态集群行为启发,提出了蜻蜓算法(Dragonfly algorithm, DA)。 2.算法原理 2.1算法思想 蜻蜓集群有两种行为目的:狩猎…...

用A*算法求解八数码问题
用A*算法求解八数码问题 实现两种启发函数实现A*算法测试 实现两种启发函数 采取两种策略实现启发函数: 策略1:不在目标位置的数字个数策略2:曼哈顿距离(将数字直接移动到对应位置的步数总数) # 策略1: 不在目标位置…...
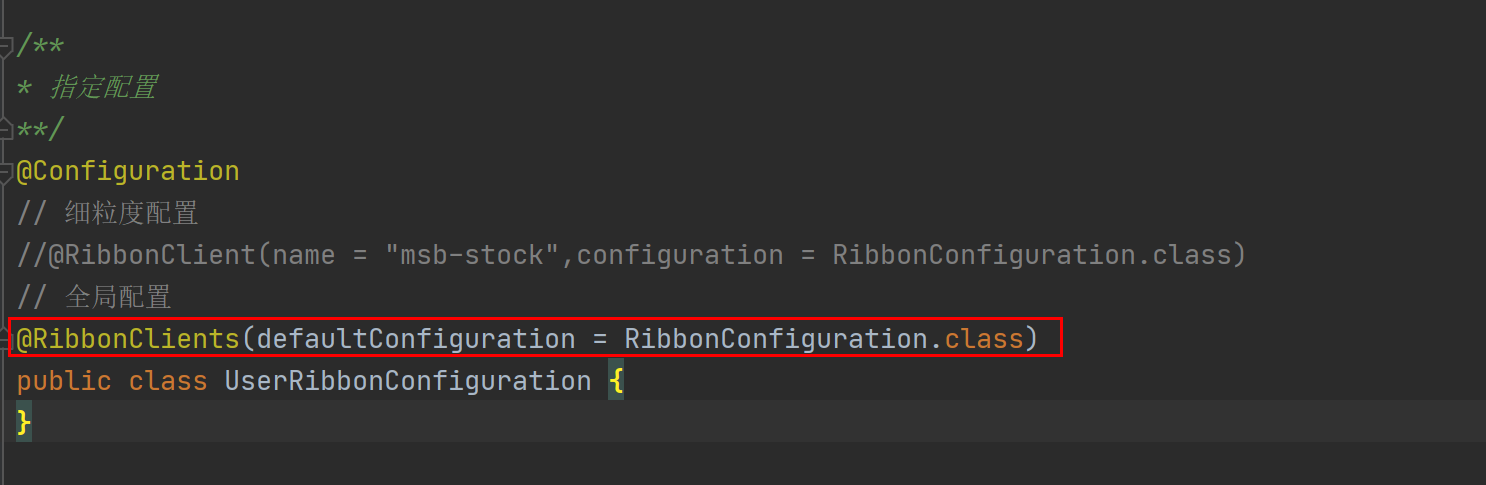
分布式之Ribbon使用以及原理
Ribbon使用以及原理 1、负载均衡的两种方式 服务器端负载均衡 传统的方式前端发送请求会到我们的的nginx上去,nginx作为反向代理,然后路由给后端的服务器,由于负载均衡算法是nginx提供的,而nginx是部署到服务器端的,所…...

android JNI float *转MutableList
data class Test(var data:MutableList<Float> )JNIEXPORT void JNICALL Java_NativeUtils_assignFloatArrayToHealth(JNIEnv *env, jclass clazz, jobject obj, jfloatArray cData) {jclass objClass env->GetObjectClass(obj);// 获取 Test类中的 data 属性jfieldI…...
chatgpt与人类有何不同?
ChatGPT和人类之间存在多个显著的差异。 首先,ChatGPT是一种基于人工智能技术的计算机程序,通过机器学习和自然语言处理等技术,从大量的数据中获取知识并生成语言输出。它主要依赖于算法和数据进行工作,能够迅速处理和检索信息&a…...
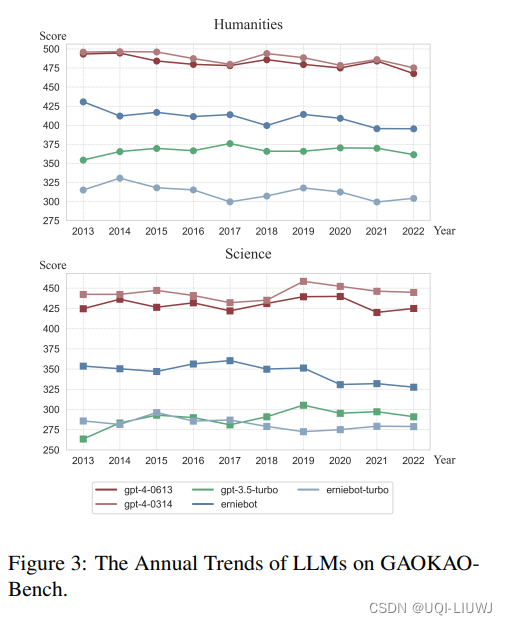
论文笔记:Evaluating the Performance of Large Language Models on GAOKAO Benchmark
1 论文思路 采用zero-shot prompting的方式,将试题转化为ChatGPT的输入 对于数学题,将公式转化为latex输入 主观题由专业教师打分 2 数据 2010~2022年,一共13年间的全国A卷和全国B卷 3 结论 3.1 不同模型的zeroshot 高考总分 3.2 各科主…...

MySQL 数据库查询与数据操作:使用 ORDER BY 排序和 DELETE 删除记录
使用 ORDER BY 进行排序 使用 ORDER BY 语句按升序或降序对结果进行排序。 ORDER BY 关键字默认按升序排序。要按降序排序结果,使用 DESC 关键字。 示例按名称按字母顺序排序结果: import mysql.connectormydb mysql.connector.connect(host"l…...
数据结构入门(3)2.链表接口实现
目录 前言 头文件 动态申请一个结点 单链表打印 单链表尾插 单链表的头插 单链表的尾删 单链表头删 单链表查找 单链表在pos位置之后插入x 单链表删除pos位置之后的值 在pos的前面插入 删除pos位置 销毁顺序表 前言 本文将介绍链表常见的功能的实现 头文件 #…...
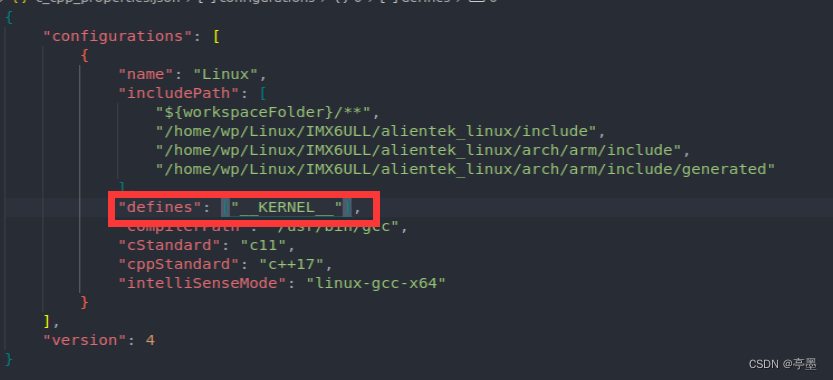
vscode中解决驱动编写的时候static int __init chrdev_init()报错的问题
目录 错误出错原因解决方法 错误 在入口函数上,出现 expected a ; 这样的提示 出错原因 缺少了 __KERNEL __ 宏定义 解决方法 补上__KERNEL__宏定义 具体做法:在vscode中按下ctrlshiftp ,输入:C/C:Edit Configurations࿰…...

fastgpt本地详细部署以及配置
目录 一、Docker部署1、docker安装2、docker启动3、添加用户到 docker 组:4、验证 Docker 安装:二、one_api 本地部署1、linux系统部署2、windows系统部署三、向量模型部署(m3e)四、chatglm2模型本地部署五、fastgpt模型本地部署1、下载配置文件2、文件配置--docker-compos…...

【故障分类】基于注意力机制的卷积神经网络结合双向长短记忆神经网络CNN-BiLSTM-attention实现数据分类附matlab代码
摘要: ntion机制加权 4. 加权后的特征进行分类 需求分析 本文旨在实现一个通用的数据分类模型,可应用于不同领域的数据分类任务。 设计方案 设计一个CNN网络结构,提取输入数据的特征 将特征序列输入到BiLSTM网络,进行时序建模…...
vue接入百度地图获取经纬度
通过城市名称和城市中心经纬度来获取当前所在地图,当前经纬度中心获取可以通过后端获取 静态文件包,替换baidu.html中的ak值,ak值通过百度地图官方网站申请 申请:百度地图API申请步骤 - 知乎 代码示例文件: 链接&a…...

交流负载箱的特点和优势有哪些?
交流负载箱广泛应用于电力系统、新能源、轨道交通、航空航天等领域。它具有以下特点和优势: 1. 灵活性高:交流负载箱可以根据实际需求,调整输出电流、电压、功率等参数,以满足不同场景下的测试需求。同时,它还可以实现…...

Java线程锁之Lock的使用
Lock 的使用 Lock 是java 1.5 中引入的线程同步工具,它主要用于多线程下共享资源的控制。本质上Lock 仅仅是一个接口, 可以通过显式定义同步锁对象来实现同步,能够提供比synchronized 更广泛的锁定操作,并支持多个相关的 Lock接…...
简站wordpress主题看上去差不多 实际大不一样
有人说简站wordpress主题,都差不多嘛。我表示无语。表面看上去是差不多的,实际的细节是不一样的。 下面以编号:JZP4431和编号:JZP4878这两个主题为例子来讲一下,简站wordpress主题,在细节方面的不一样之处…...

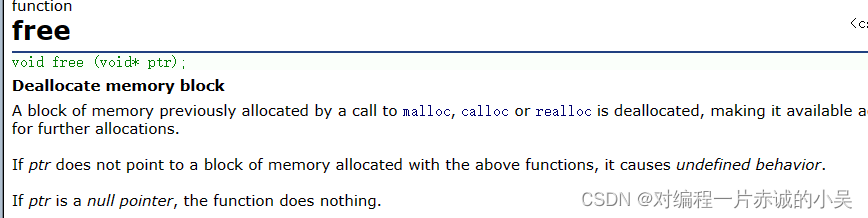
(完美方案)解决mfc140u.dll文件丢失问题,快速且有效的修复
唉,又是丢失了mfc140u.dll,这该怎么办呢?如果你的电脑突然找不到或丢失mfc140u.dll文件,那就真是太糟糕了。别担心,我分享给你一些干货,告诉你如何快速解决mfc140u.dll丢失的问题。 一.mfc140u.dll属性功能…...
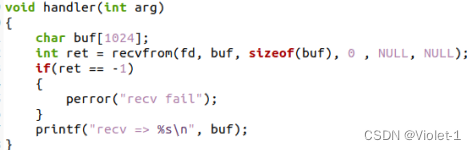
并发通信(网络进程线程)
如果为每个客户端创建一个进程(或线程),因为linux系统文件标识符最多1024位,是有限的。 所以使用IO复用技术,提高并发程度。 阻塞与非阻塞 阻塞式复用 非阻塞复用 信号驱动IO 在属主进程(线程中声明&…...

WPF 该线程是用不接受参数的 ThreadStart 委托创建的。
创建无参数线程是无法发去传递参数的,需要把 《 thread.Start(“张三”); 》改为《 thread.Start(); 》 把参数去掉就可以了。 public RegisterWindow(){InitializeComponent();//无参数线程Thread thread new Thread(pageLoad);thread.IsBackground true;//thr…...

FreeRTOS学习第9篇--队列介绍
目录 FreeRTOS学习第9篇--队列介绍1. 数据传输的方法1.1 任务之间如何传输数据1.2 队列的本质 2. 队列的工作原理和实现2.1 创建队列2.2 向队列发送数据2.3 从队列接收数据 3. 使用队列进行任务间的通信3.1 通信示例3.2 同步示例 结论 FreeRTOS学习第9篇–队列介绍 本文目标&a…...

qt如何配置ros环境
在Qt5.7的版本可以使用bash -i -c来启动qt,让Qt自己识别系统环境,不知道为什么Qt在之后的版本,这样使用都失效了。因为它会默认把CMAKE_PREFIX_PATH修改掉。 网上还有安装ros插件版本的qt creator,感觉失去了一些灵活性。 自己测试…...

SmolVLA企业级应用:基于.NET框架的智能业务系统集成
SmolVLA企业级应用:基于.NET框架的智能业务系统集成 最近和几个做企业级开发的朋友聊天,他们都在头疼一件事:公司业务系统越来越复杂,每天要处理大量审批、报表和客户沟通,人工操作效率低还容易出错。他们问我&#x…...

如何实现语音输入到文档的无缝衔接:Whispering终极指南
如何实现语音输入到文档的无缝衔接:Whispering终极指南 【免费下载链接】epicenter Open-source, local-first apps. 项目地址: https://gitcode.com/GitHub_Trending/whis/epicenter Whispering是一款免费开源的本地优先应用,作为Epicenter生态系…...

HunyuanVideo-Foley效果展示:RTX4090D优化版生成的城市街道音效实测
HunyuanVideo-Foley效果展示:RTX4090D优化版生成的城市街道音效实测 1. 音效生成技术的新突破 当你在观看一部电影或短视频时,那些细微的环境音效——脚步声、汽车鸣笛、风吹树叶的沙沙声,往往能带来最真实的沉浸感。传统上,这些…...

OBS StreamFX插件深度解析:12个高级特效实现原理与实战指南
OBS StreamFX插件深度解析:12个高级特效实现原理与实战指南 【免费下载链接】obs-StreamFX StreamFX is a plugin for OBS Studio which adds many new effects, filters, sources, transitions and encoders! Be it 3D Transform, Blur, complex Masking, or even …...
完全指南)
Vue 插槽(Slot)完全指南
插槽是 Vue 中组件内容分发的机制,让父组件可以向子组件传递 HTML 内容。一、为什么需要插槽?<!-- 子组件 Card.vue --> <div class"card"><div class"header">标题</div><div class"body">…...

UBuntu+openClaw实现个人AI助手
记录于2026年3月9号个人博客,现转录CSDN在 Ubuntu 上用 OpenClaw 搭建个人 AI 助手,核心是:一行命令安装 → 配置大模型 API → 启动服务 → 用 Web / 微信 / Telegram 交互。全程本地部署、数据可控、支持自动任务与自定义技能。 系统要求&a…...

我的个人AI知识管家:用DeepSeek R1和ChromaDB给本地文档做个“搜索引擎”
我的个人AI知识管家:用DeepSeek R1和ChromaDB给本地文档做个"搜索引擎" 1. 为什么你需要一个私人知识库? 每天我们都在处理海量的信息——工作文档、学习笔记、技术资料、会议记录...这些散落在电脑各处的文件就像一座未经开采的金矿。你是否遇…...

GyverWire:嵌入式轻量级通用串行通信框架
1. GyverWire:面向嵌入式系统的轻量级、高鲁棒性通用串行通信框架GyverWire 是一款专为资源受限嵌入式平台(尤其是 Arduino 生态)设计的底层通信库,其核心目标并非实现某一种特定物理层协议,而是提供一个可复用、可扩展…...

ANSYS APDL循环建模中的高效数据交互技巧
1. ANSYS APDL循环建模与MATLAB数据交互的核心价值 在工程仿真领域,ANSYS APDL的循环建模能力堪称自动化分析的利器。我曾在某型风力发电机叶片参数化分析项目中,用循环建模一次性完成了178组不同翼型参数的强度计算,整个过程从原来的两周缩短…...

Diablo16串口库:Arduino驱动4D Systems图形屏实战指南
1. Diablo16-Serial-Arduino-Library 项目概述Diablo16-Serial-Arduino-Library 是一个专为 Arduino 平台设计的串行通信封装库,用于与 4D Systems 公司基于 Diablo16 图形处理器(GPU)的显示模块进行高效、可靠的指令交互。该库并非直接驱动 …...