【读论文】【精读】3D Gaussian Splatting for Real-Time Radiance Field Rendering
文章目录
- 1. What:
- 2. Why:
- 3. How:
- 3.1 Real-time rendering
- 3.2 Adaptive Control of Gaussians
- 3.3 Differentiable 3D Gaussian splatting
- 4. Self-thoughts
1. What:
What kind of thing is this article going to do (from the abstract and conclusion, try to summarize it in one sentence)
To simultaneously satisfy the requirements of efficiency and quality, this article begins by establishing a foundation with sparse points using 3D Gaussian distributions to preserve desirable space. It then progresses to optimizing anisotropic covariance to achieve an accurate representation. Lastly, it introduces a cutting-edge, visibility-aware rendering algorithm designed for rapid processing, thereby achieving state-of-the-art results in the field.
2. Why:
Under what conditions or needs this research plan was proposed (Intro), what problems/deficiencies should be solved at the core, what others have done, and what are the innovation points? (From Introduction and related work)
Maybe contain Background, Question, Others, Innovation:
Three aspects of related work can explain this question.
-
Traditional reconstructions such as SfM and MVS need to re-project and
blend the input images into the novel view camera, and use the
geometry to guide this re-projection(From 2D to 3D).Sad: Cannot completely recover from unreconstructed regions, or from “over-reconstruction”, when MVS generates inexistent geometry.
-
Neural Rendering and Radiance Fields
Neural rendering represents a broader category of techniques that leverage deep learning for image synthesis, while radiance field is a specific technique within neural rendering focused on the scene representation of light and color in 3D spaces.
-
Deep Learning was mainly used on MVS-based geometry before, which is also its major drawback.
-
Nerf is along the way of volumetric representation, which introduced positional encoding and importance sampling.
-
Faster training methods focus on the use of spatial data structures to store (neural) features that are subsequently interpolated during volumetric ray-marching, different encodings, and MLP capacity.
-
Today, notable works include InstantNGP and Plenoxels both rely on Spherical Harmonics.
Understand Spherical Harmonics as a set of basic functions to fit a geometry in a 3D spherical coordinate system.
球谐函数介绍(Spherical Harmonics) - 知乎 (zhihu.com)
- Point-Based Rendering and Radiance Fields
- The methods in human performance capture inspired the choice of 3D Gaussians as scene representation.
- Point-based and spherical rendering is achieved before.
3. How:

Through the Gradient Flow in this paper’s pipeline, we are trying to connect Part4, 5, and 6 in this paper.
Firstly, start from the loss function, which is combined by a L 1 {\mathcal L}_{1} L1 loss and a S S I M SSIM SSIM index, just as shown below:
L = ( 1 − λ ) L 1 + λ L D − S S I M . (1) {\mathcal L}=(1-\lambda){\mathcal L}_{1}+\lambda{\mathcal L}_{\mathrm{D-SSIM}}.\tag{1} L=(1−λ)L1+λLD−SSIM.(1)
It found a relation between the actual image and the rendering image. So to finish the optimization, we need to dive into the process of rendering. From the chapter on related work, we know Point-based α \alpha α-blending and NeRF-style volumetric rendering share essentially the same image formation model. That is
C = ∑ i = 1 N T i ( 1 − exp ( − σ i δ i ) ) c i w i t h T i = exp ( − ∑ j = 1 i − 1 σ j δ j ) . (2) C=\sum_{i=1}^{N}T_{i}(1-\exp(-\sigma_{i}\delta_{i}))c_{i}\quad\mathrm{with}\quad T_{i}=\exp\left(-\sum_{j=1}^{i-1}\sigma_{j}\delta_{j}\right).\tag{2} C=i=1∑NTi(1−exp(−σiδi))ciwithTi=exp(−j=1∑i−1σjδj).(2)
And this paper actually uses a typical neural point-based approach just like (2), which can be represented as:
C = ∑ i ∈ N c i α i ∏ j = 1 i − 1 ( 1 − α j ) (3) C=\sum_{i\in N}c_{i}\alpha_{i}\prod_{j=1}^{i-1}(1-\alpha_{j}) \tag{3} C=i∈N∑ciαij=1∏i−1(1−αj)(3)
From this formulation, we can know what the representation of volume should contain the information of color c c c and transparency α \alpha α. These are attached to the gaussian, where Spherical Harmonics was used to represent color, just like Plenoxels. The other attributes used are the position and covariance matrix. So, now we have introduced the four attributes to represent the scene, that is positions 𝑝, 𝛼, covariance Σ, and SH coefficients representing color 𝑐 of each Gaussian.
After knowing the basic elements we need to use, now let’s work backward, starting with rendering, which was addressed in the author’s previous paper.
3.1 Real-time rendering
This method is independent of the propagation of gradients but is critical for real-time performance, which was published in the author’s paper before.

In the previous game, someone had tried to model the world in ellipsoid and render it. This is the same as the render process of Gaussian splatting. But the latter uses lots of techniques in the utilization of threads and GPU.
- Firstly, it starts by splitting the screen into 16×16 tiles and then proceeds to cull 3D Gaussians against the view frustum and each tile, only keeping Gaussians with a 99% confidence interval intersecting the view frustum.
- Then instantiate each Gaussian according to the number of tiles they overlap and assign each instance a key that combines view space depth and tile ID.
- Then sort Gaussians based on these keys using a single fast GPU Radix sort.
- Finally, launching one thread block for each tile, for a given pixel, accumulate color and transparency values by traversing the lists front-to-back, until α \alpha α goes to one.
3.2 Adaptive Control of Gaussians
In the process of fitting gaussian to the scene, we should utilize the number and volume of gaussian to strengthen the representation of the scene. It contained two methods named clone and split, as shown below.

These were judged by the view-space positional gradients. Both under-reconstruction and over-construction have large view-space positional gradients. We will clone or split the gaussian according to different conditions.
3.3 Differentiable 3D Gaussian splatting
We have known the process of rendering and control of gaussian. Finally, we will talk about how to backward the gradients to where we can optimize. This is mainly about the processing of Gaussian function.
The basic simplified formulation of 3D Gaussain can be represented as:
G ( x ) = e − 1 2 ( x ) T Σ − 1 ( x ) . (4) G(x)=e^{-\frac{1}{2}(x)^{T}\Sigma^{-1}(x)}.\tag{4} G(x)=e−21(x)TΣ−1(x).(4)
We will use α \alpha α-blending to combine it to generate the rendering picture, so that we can calculate the loss function and finish the optimization. So now we need to know how to optimize and calculate the gradients of Gaussian.
When rasterizing, the three-dimensional scene needs to be transformed into a two-dimensional space. The author hopes that the 3D Gaussian will maintain its distribution during the transformation (otherwise, if the raster finish has nothing to do with Gaussian, all the efforts will be in vain). So we should choose a method to transfer the covariance matrix to camera coordinate without change the affine relation. That is
Σ ′ = J W Σ W T J T , (5) \Sigma'=JW\Sigma W^{T}J^{T},\tag{5} Σ′=JWΣWTJT,(5)
where J J J is the Jacobian of the affine approximation of the projective transformation.
Another problem is that the covariance matrix must be semi-definite. So we use a scaling matrix 𝑆 and rotation matrix 𝑅 to assure it. That is
Σ = R S S T R T (6) \Sigma=RSS^{T}R^{T}\tag{6} Σ=RSSTRT(6)
And then we can use a 3D vector 𝑠 for scaling and a quaternion 𝑞 to represent rotation. The gradients will backward to them. These are the whole process of optimization.
4. Self-thoughts
- Summary of different representation
- Explicit representation: Mesh, Point Cloud
- Implicit representation
-
Volumetric representation: Nerf
The density value returned by the sample points reflects whether there is geometric occupancy here.
-
Surface representation: SDF(Signed Distance Function)
Outputs the distance to the nearest surface in the space from this point, where a positive value indicates outside the surface, and a negative value indicates inside the surface.
-
Refer:
[1]: 3D Gaussian Splatting:用于实时的辐射场渲染-CSDN博客
[2]: 【三维重建】3D Gaussian Splatting:实时的神经场渲染-CSDN博客
[3]: 3D Gaussian Splatting中的数学推导 - 知乎 (zhihu.com)
[4]: [NeRF坑浮沉记]3D Gaussian Splatting入门:如何表达几何 - 知乎 (zhihu.com)
相关文章:
【读论文】【精读】3D Gaussian Splatting for Real-Time Radiance Field Rendering
文章目录 1. What:2. Why:3. How:3.1 Real-time rendering3.2 Adaptive Control of Gaussians3.3 Differentiable 3D Gaussian splatting 4. Self-thoughts 1. What: What kind of thing is this article going to do (from the a…...
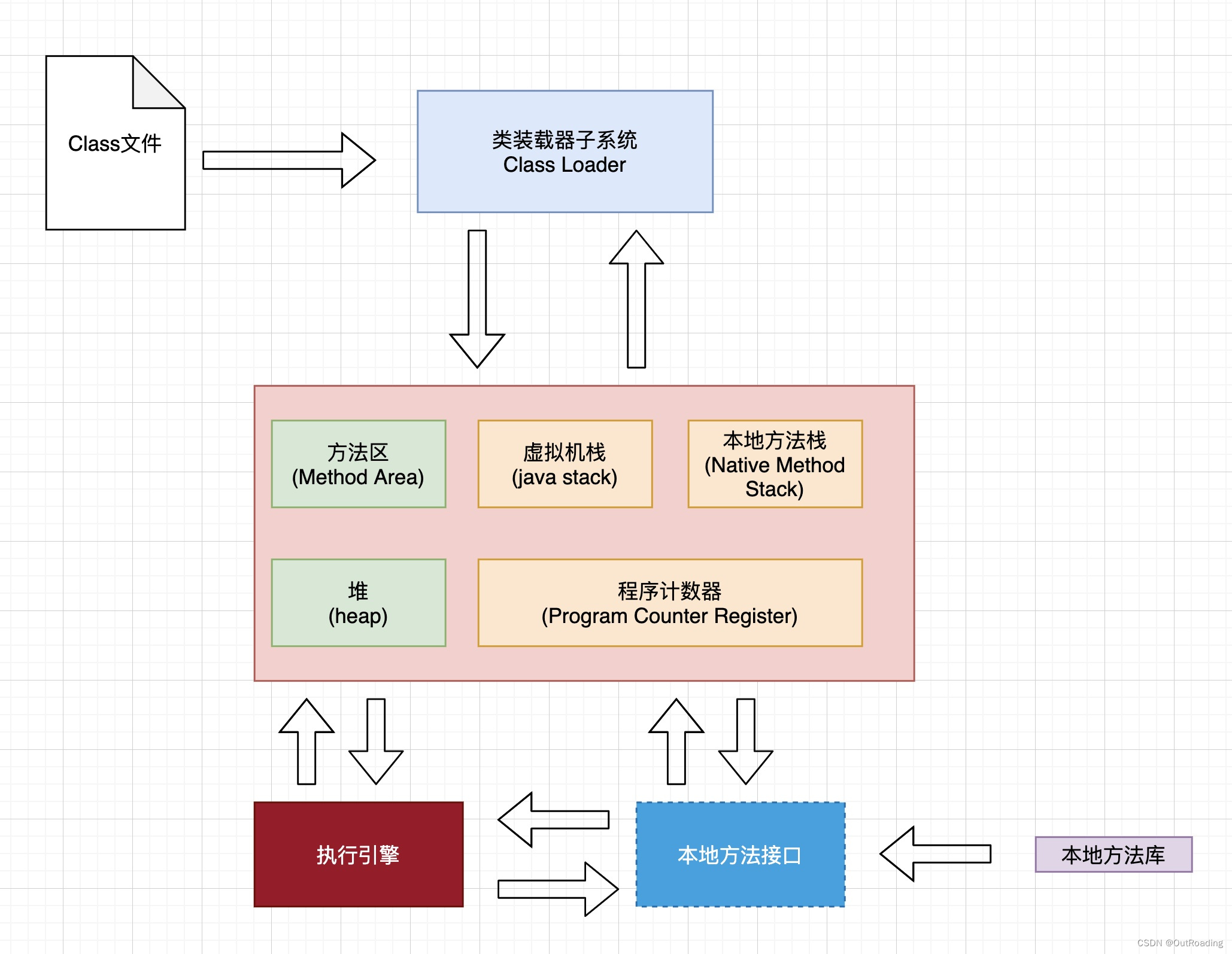
JVM理解学习
参考视频 JVM架构总览图 程序计数器 程序计数器,物理上用寄存器实现。 作用: 记住下一条JVM指令的执行地址 特点: 1 是线程私有的,随着线程的创建而创建,随着线程的消息而消息 2 是一小块内存 3 唯一不会内存溢出的地方…...

使用 Ruby 或 Python 在文件中查找
对于经常使用爬虫的我来说,在大多数文本编辑器都会有“在文件中查找”功能,主要是方便快捷的查找自己说需要的内容,那我有咩有可能用Ruby 或 Python实现类似的查找功能?这些功能又能怎么实现? 问题背景 许多流行的文本…...

python实现冒泡排序
冒泡排序是一种简单的排序算法,它重复地遍历要排序的数列,一次比较两个元素,如果他们的顺序错误就把他们交换过来。遍历数列的工作是重复地进行直到没有再需要交换,也就是说该数列已经排序完成。 以下是用Python实现冒泡排序的代…...
)
大数据开发(HBase面试真题-卷二)
大数据开发(HBase面试真题) 1、HBase读写数据流程?2、HBase的读写缓存?3、在删除HBase中的一个数据的时候,它什么时候真正的进行删除呢?4、HBase的一个region由哪些东西组成?5、HBase的rowkey为…...
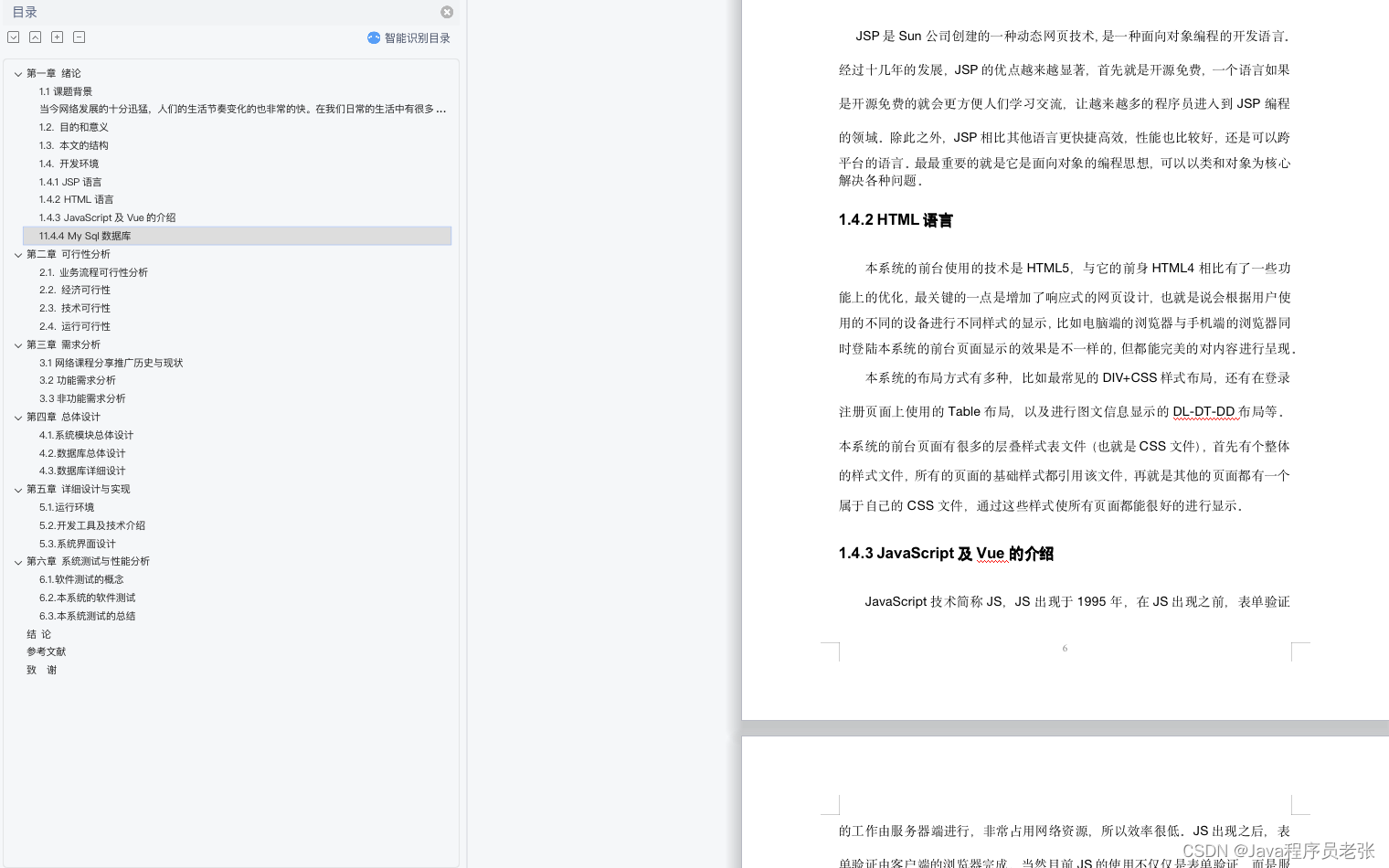
基于springboot+vue的线上教育系统(源码+论文)
目录 前言 一、功能设计 二、功能实现 三、库表设计 四、论文 前言 现在大家的生活方式正在被计算机的发展慢慢改变着,学习方式也逐渐由书本走向荧幕,我认为这并不是不能避免的,但说实话,现在的生活方式与以往相比有太大的改变,人们的娱乐方式不仅仅…...

01-shell的自学课-基础变量学习
一、echo变量的一个坑 声明【临时变量】,然后打印出来;(拓展:env是linux的全局变量) [rootgong ~]# xinjizhiwashell [rootgong ~]# echo $xinjizhiwa shell [rootgong ~]# echo $xinjizhiwa-haha shell-haha [rootgo…...

鸿蒙Harmony应用开发—ArkTS声明式开发(基础手势:Span)
作为Text组件的子组件,用于显示行内文本的组件。 说明: 该组件从API Version 7开始支持。后续版本如有新增内容,则采用上角标单独标记该内容的起始版本。 该组件从API Version 10开始支持继承父组件Text的属性,即如果子组件未设置…...

前端框架的演进之路:从静态网页到现代交互体验的探索
前端框架的发展史 随着互联网的快速发展,前端技术也在不断进步,前端框架作为前端开发的重要工具,经历了从简单到复杂、从单一到多元的演变过程。本文将回顾前端框架的发展史,探讨其变迁背后的原因和趋势。 一、静态网页时代 在…...

在Linux/Ubuntu/Debian中设置字体
下载字体。 下载你喜欢的字体,双击并安装。 之后更新字体缓存: fc-cache -f -v安装 GNOME 调整。 GNOME Tweaks 是一个工具,允许你自定义 GNOME 桌面环境的各个方面,包括字体。 如果你还没有安装 GNOME Tweaks: …...

Python 常用内置函数,及实例演示
Python的内置函数非常强大,可以帮助你完成各种任务。以下是20个非常有用的Python内置函数及其使用实例: 1. abs() 返回数字的绝对值。 print(abs(-5)) # 输出:52. all() 如果迭代器的所有元素都为真(或迭代器为空)…...

C++标准输入输出和名字空间
C标准输入输出和名字空间 标准输入输出 在C中,标准输入输出(I/O)是通过标准库中的iostream库来实现的,它提供了一套流(stream)抽象来进行数据的输入和输出操作。这套流抽象包括输入流用于读取数据&#x…...

hive逗号分割行列转换
select * from ( select back_receipt_nos,order_no,reject_no from ods_oneplus.ods_us_wms_reject_order_match_all_d where order_no 10150501385980001 ) t1 lateral view explode(split(t1.back_receipt_nos, ,)) t as back_receipt_no where 1 1;...
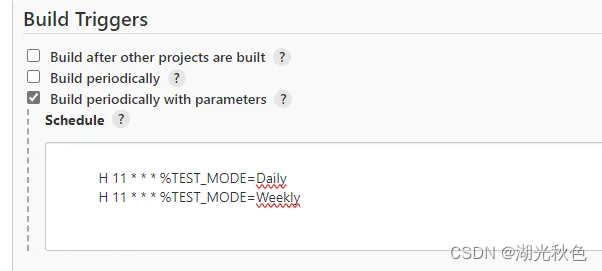
Jenkins插件Parameterized Scheduler用法
Jenkins定时触发构建的同时设定参数。可以根据不同的定时构建器设置不同参数或环境变量的值。可以设置多个参数。并结合when控制stage流程的执行。结合when和triggeredBy区分定时构建的stage和手动执行的stage。 目录 什么是Parameterized Scheduler?如何配置实现呢…...

西门子S7.NET通信库【读】操作详解
在使用西门子PLC进行工业自动化控制的过程中,经常需要与PLC进行数据交换。S7.NET是一款广泛应用于.NET平台的西门子PLC通信库,它为开发者提供了一系列的API函数,以便在C#、VB.NET等.NET语言中轻松实现与西门子PLC的数据交互。本文将详细介绍如…...

Qt/C++音视频开发69-保存监控pcm音频数据到mp4文件/监控录像/录像存储和回放/264/265/aac/pcm等
一、前言 用ffmpeg做音视频保存到mp4文件,都会遇到一个问题,尤其是在视频监控行业,就是监控摄像头设置的音频是PCM/G711A/G711U,解码后对应的格式是pcm_s16be/pcm_alaw/pcm_mulaw,将这个原始的音频流保存到mp4文件是会…...

闲聊Swift的枚举关联值
闲聊Swift的枚举关联值 枚举,字面上理解,就是把东西一件件列出来。 在许多计算机语言中,枚举都是一种重要的数据结构。使用枚举可以使代码更简洁,语义性更强,更加健壮。 Swift语言也不例外。但和其他语言相比…...

抓取Instagram数据:Fizzler库带您进入C#爬虫程序的世界
引言 在当今数字化的世界中,数据是无价之宝。社交媒体平台如Instagram成为了用户分享照片、视频和故事的热门场所。作为开发人员,我们可以利用爬虫技术来抓取这些平台上的数据,进行分析、挖掘和应用。本文将介绍如何使用C#编写一个简单的Ins…...
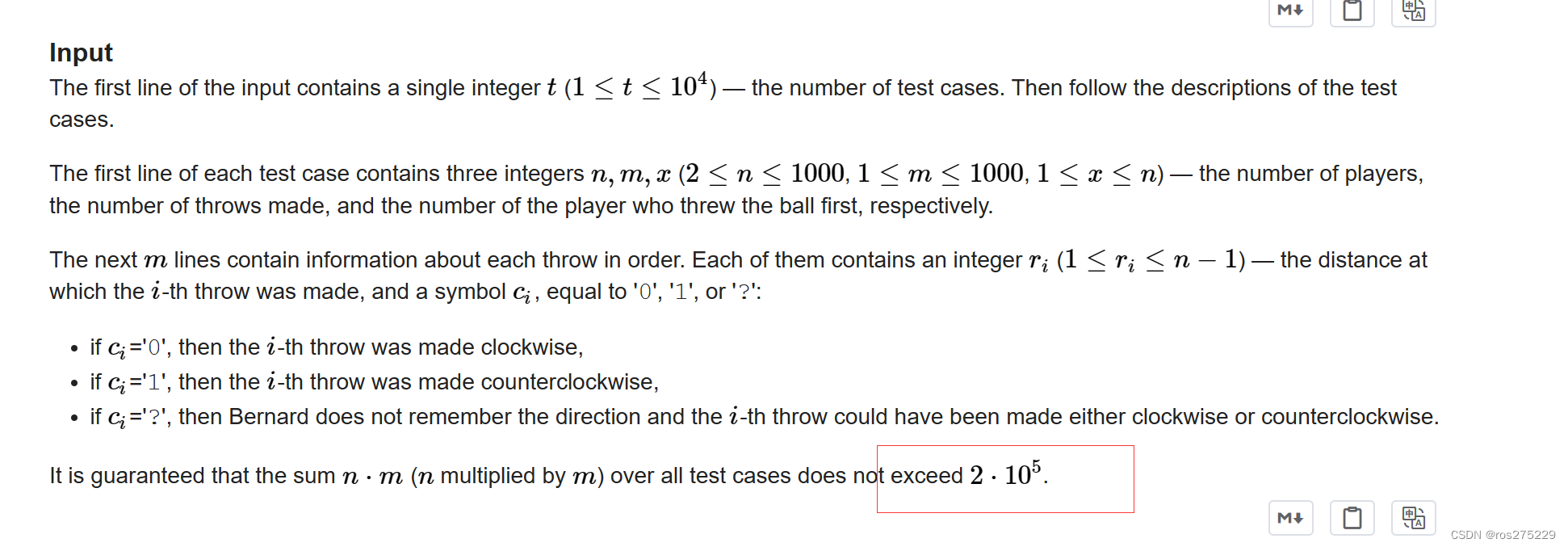
Codeforces Round 933 (Div. 3) A~D
比赛链接 : codeforces.com/contest/1941 A . Rudolf and the Ticket 直接暴力即可 ; #include<bits/stdc.h> #define IOS ios::sync_with_stdio(0);cin.tie(0);cout.tie(0); #define endl \n #define lowbit(x) (x&(-x)) #define sz(a) (int)a.size() #define p…...
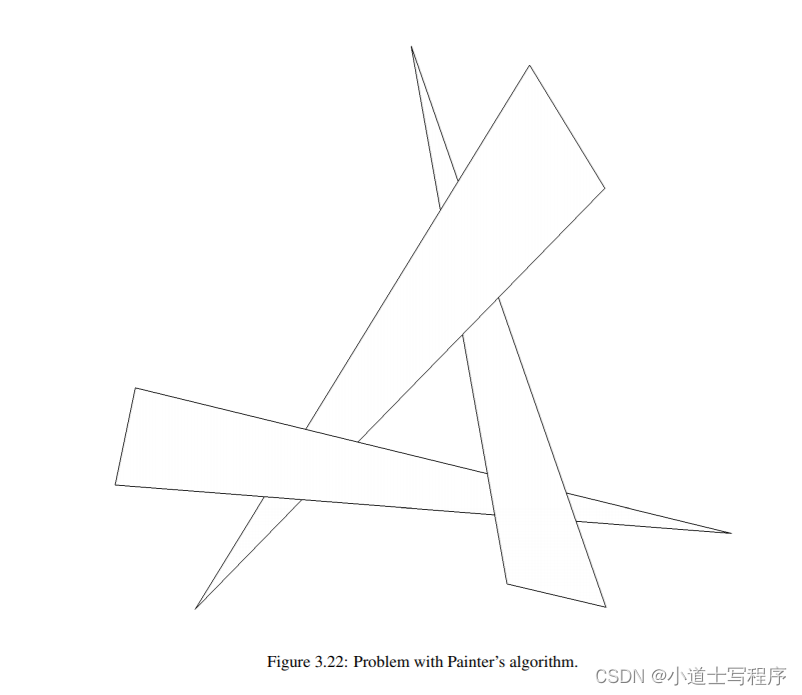
《vtk9 book》 官方web版 第3章 - 计算机图形基础 (3 / 5)
3.8 演员几何 我们已经看到了光照属性如何控制演员的外观,以及相机如何结合变换矩阵将演员投影到图像平面上。剩下的是定义演员的几何形状,以及如何将其定位在世界坐标系中。 建模 计算机图形学研究中的一个重要主题是建模或表示物体的几何形状。…...

LLM API安全攻防实战:从提示词注入到自动化测试方案
1. 项目概述:被忽视的LLM API安全前线最近在帮几个团队做上线前的安全审计,发现一个挺有意思的现象:大家对于传统API的鉴权、限流、SQL注入这些常规检查已经形成了肌肉记忆,但一旦涉及到LLM(大语言模型)的A…...
)
从USB转TTL接线到手机热点配网:ESP8266无线通信保姆级避坑指南(附软件包)
从USB转TTL接线到手机热点配网:ESP8266无线通信保姆级避坑指南 当你第一次拿起ESP8266模块时,可能会被这个小巧的Wi-Fi模块惊艳到——它只有指甲盖大小,却蕴含着强大的无线通信能力。但很快,这种惊艳就会变成困惑:为什…...

从Gamma函数到泊松分布:一个概率论中的含参量积分实用案例解析
Gamma函数与泊松分布:概率论中的数学之美 在数据科学和机器学习的实践中,概率分布构成了建模的基石。当我们深入探究这些分布背后的数学原理时,Gamma函数以其优雅的性质和广泛的应用脱颖而出。它不仅连接了离散与连续概率世界,更在…...

转行网络安全运维:从0到1的可落地指南
转行网络安全运维:从0到1的可落地指南 一、 「3个核心技能:从零起步也能会」 网上学习资料多到爆炸,不用纠结“哪个最好”,记住一句话:**能学会、能上手的就是好的**!不管是免费视频还是付费课,…...

LoRa物联网与动态基线算法在养殖体温监测中的实战应用
1. 项目概述:为什么我们需要一个智能体温监测系统?在规模化养殖场里干了十几年,我见过太多因为体温异常没被及时发现而导致的损失。一头育肥猪突然不吃食,等饲养员第二天巡栏发现时,可能已经高烧好几天,继发…...

render_async嵌套渲染:构建复杂异步界面的完整解决方案
render_async嵌套渲染:构建复杂异步界面的完整解决方案 【免费下载链接】render_async render_async lets you include pages asynchronously with AJAX 项目地址: https://gitcode.com/gh_mirrors/re/render_async 在现代Web开发中,页面加载速度…...
)
别再纠结了!给激光焊接新手讲透单模和多模激光到底怎么选(附M²因子解读)
激光焊接设备选型指南:单模与多模激光的实战抉择 当你第一次站在激光焊接设备采购的十字路口,面对"单模"和"多模"这两个专业术语时,那种迷茫感我深有体会。五年前,我作为产线技术负责人,需要为汽车…...

LLM测试工程师必看,Claude E2E测试架构设计,从用例生成、黄金样本构建到回归基线告警闭环
更多请点击: https://codechina.net 第一章:LLM测试工程师必看,Claude E2E测试架构设计,从用例生成、黄金样本构建到回归基线告警闭环 核心架构概览 Claude端到端测试架构采用三层解耦设计:输入层(动态用…...

3步解决英雄联盟回放难题:ROFL-Player终极使用指南
3步解决英雄联盟回放难题:ROFL-Player终极使用指南 【免费下载链接】ROFL-Player (No longer supported) One stop shop utility for viewing League of Legends replays! 项目地址: https://gitcode.com/gh_mirrors/ro/ROFL-Player 你是否曾经遇到过这样的烦…...
功能才是宝藏)
Unity Cinemachine相机系统深度使用:除了自动跟随,它的边界限制(Confiner)功能才是宝藏
Unity Cinemachine Confiner:解锁专业级镜头边界控制的实战指南在游戏开发中,镜头控制往往是被低估的艺术。许多开发者对Cinemachine的印象停留在"智能跟随相机"层面,却不知道它的Confiner功能能够彻底改变游戏镜头的专业度。想象一…...