【PCL】(二十八)点云超体素分割
(二十九)点云超体素分割
论文:Voxel Cloud Connectivity Segmentation - Supervoxels for Point Clouds
supervoxel_clustering.cpp
#include <pcl/console/parse.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/segmentation/supervoxel_clustering.h>//VTK include needed for drawing graph lines
#include <vtkPolyLine.h>// Types
typedef pcl::PointXYZRGBA PointT;
typedef pcl::PointCloud<PointT> PointCloudT;
typedef pcl::PointNormal PointNT;
typedef pcl::PointCloud<PointNT> PointNCloudT;
typedef pcl::PointXYZL PointLT;
typedef pcl::PointCloud<PointLT> PointLCloudT;void addSupervoxelConnectionsToViewer (PointT &supervoxel_center,PointCloudT &adjacent_supervoxel_centers,std::string supervoxel_name,pcl::visualization::PCLVisualizer::Ptr & viewer);int main (int argc, char ** argv)
{if (argc < 2){pcl::console::print_error ("Syntax is: %s <pcd-file> \n ""--NT Dsables the single cloud transform \n""-v <voxel resolution>\n-s <seed resolution>\n""-c <color weight> \n-z <spatial weight> \n""-n <normal_weight>\n", argv[0]);return (1);}PointCloudT::Ptr cloud (new PointCloudT);pcl::console::print_highlight ("Loading point cloud...\n");if (pcl::io::loadPCDFile<PointT> (argv[1], *cloud)){pcl::console::print_error ("Error loading cloud file!\n");return (1);}/*--NT禁用单视图变换(仅影响有组织云)-v设置体素大小,决定基础八叉树结构的叶大小(以米为单位)-s设置种子大小,决定超体素的大小(以米为单位)-c设置颜色影响超体素的形状的权重-z设置空间项的权重-值越高,超体素越规则-n设置曲面法线影响超体素的形状的权重*/bool disable_transform = pcl::console::find_switch (argc, argv, "--NT");float voxel_resolution = 0.008f;bool voxel_res_specified = pcl::console::find_switch (argc, argv, "-v");if (voxel_res_specified)pcl::console::parse (argc, argv, "-v", voxel_resolution);float seed_resolution = 0.1f;bool seed_res_specified = pcl::console::find_switch (argc, argv, "-s");if (seed_res_specified)pcl::console::parse (argc, argv, "-s", seed_resolution);float color_importance = 0.2f;if (pcl::console::find_switch (argc, argv, "-c"))pcl::console::parse (argc, argv, "-c", color_importance);float spatial_importance = 0.4f;if (pcl::console::find_switch (argc, argv, "-z"))pcl::console::parse (argc, argv, "-z", spatial_importance);float normal_importance = 1.0f;if (pcl::console::find_switch (argc, argv, "-n"))pcl::console::parse (argc, argv, "-n", normal_importance);// 超体素聚类pcl::SupervoxelClustering<PointT> super (voxel_resolution, seed_resolution);if (disable_transform) // 如果收入是有组织的云,而该云的相机坐标不在(0,0,0)且深度不在正Z,则必须将use_transform设置为falsesuper.setUseSingleCameraTransform (false); super.setInputCloud (cloud);super.setColorImportance (color_importance);super.setSpatialImportance (spatial_importance);super.setNormalImportance (normal_importance);std::map <std::uint32_t, pcl::Supervoxel<PointT>::Ptr > supervoxel_clusters;pcl::console::print_highlight ("Extracting supervoxels!\n");super.extract (supervoxel_clusters);pcl::console::print_info ("Found %d supervoxels\n", supervoxel_clusters.size ());// 超体素可视化pcl::visualization::PCLVisualizer::Ptr viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));viewer->setBackgroundColor (0, 0, 0);// voxel_centroid_cloud包含由体素质心组成的云PointCloudT::Ptr voxel_centroid_cloud = super.getVoxelCentroidCloud ();viewer->addPointCloud (voxel_centroid_cloud, "voxel centroids");viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE,2.0, "voxel centroids");viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_OPACITY,0.95, "voxel centroids");//labeled_voxel_cloud 是根据其超体素标签(随机颜色)着色的体素。PointLCloudT::Ptr labeled_voxel_cloud = super.getLabeledVoxelCloud ();viewer->addPointCloud (labeled_voxel_cloud, "labeled voxels");viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_OPACITY,0.8, "labeled voxels");// sv_normal_cloud包含一个超体素法线云,PointNCloudT::Ptr sv_normal_cloud = super.makeSupervoxelNormalCloud (supervoxel_clusters);//We have this disabled so graph is easy to see, uncomment to see supervoxel normals//viewer->addPointCloudNormals<PointNormal> (sv_normal_cloud,1,0.05f, "supervoxel_normals");pcl::console::print_highlight ("Getting supervoxel adjacency\n");std::multimap<std::uint32_t, std::uint32_t> supervoxel_adjacency;super.getSupervoxelAdjacency (supervoxel_adjacency);//To make a graph of the supervoxel adjacency, we need to iterate through the supervoxel adjacency multimapfor (auto label_itr = supervoxel_adjacency.cbegin (); label_itr != supervoxel_adjacency.cend (); ){//First get the label std::uint32_t supervoxel_label = label_itr->first;//Now get the supervoxel corresponding to the labelpcl::Supervoxel<PointT>::Ptr supervoxel = supervoxel_clusters.at (supervoxel_label);//Now we need to iterate through the adjacent supervoxels and make a point cloud of themPointCloudT adjacent_supervoxel_centers;for (auto adjacent_itr = supervoxel_adjacency.equal_range (supervoxel_label).first; adjacent_itr!=supervoxel_adjacency.equal_range (supervoxel_label).second; ++adjacent_itr){pcl::Supervoxel<PointT>::Ptr neighbor_supervoxel = supervoxel_clusters.at (adjacent_itr->second);adjacent_supervoxel_centers.push_back (neighbor_supervoxel->centroid_);}//Now we make a name for this polygonstd::stringstream ss;ss << "supervoxel_" << supervoxel_label;//This function is shown below, but is beyond the scope of this tutorial - basically it just generates a "star" polygon mesh from the points givenaddSupervoxelConnectionsToViewer (supervoxel->centroid_, adjacent_supervoxel_centers, ss.str (), viewer);//Move iterator forward to next labellabel_itr = supervoxel_adjacency.upper_bound (supervoxel_label);}while (!viewer->wasStopped ()){viewer->spinOnce (100);}return (0);}void addSupervoxelConnectionsToViewer (PointT &supervoxel_center,PointCloudT &adjacent_supervoxel_centers,std::string supervoxel_name,pcl::visualization::PCLVisualizer::Ptr & viewer)
{vtkSmartPointer<vtkPoints> points = vtkSmartPointer<vtkPoints>::New ();vtkSmartPointer<vtkCellArray> cells = vtkSmartPointer<vtkCellArray>::New ();vtkSmartPointer<vtkPolyLine> polyLine = vtkSmartPointer<vtkPolyLine>::New ();//Iterate through all adjacent points, and add a center point to adjacent point pairfor (auto adjacent_itr = adjacent_supervoxel_centers.begin (); adjacent_itr != adjacent_supervoxel_centers.end (); ++adjacent_itr){points->InsertNextPoint (supervoxel_center.data);points->InsertNextPoint (adjacent_itr->data);}// Create a polydata to store everything invtkSmartPointer<vtkPolyData> polyData = vtkSmartPointer<vtkPolyData>::New ();// Add the points to the datasetpolyData->SetPoints (points);polyLine->GetPointIds ()->SetNumberOfIds(points->GetNumberOfPoints ());for(unsigned int i = 0; i < points->GetNumberOfPoints (); i++)polyLine->GetPointIds ()->SetId (i,i);cells->InsertNextCell (polyLine);// Add the lines to the datasetpolyData->SetLines (cells);viewer->addModelFromPolyData (polyData,supervoxel_name);
}cmake_minimum_required(VERSION 3.5 FATAL_ERROR)project(supervoxel_clustering)find_package(PCL 1.8 REQUIRED)include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})add_executable (supervoxel_clustering supervoxel_clustering.cpp)
target_link_libraries (supervoxel_clustering ${PCL_LIBRARIES})
数据样例

编译并运行:
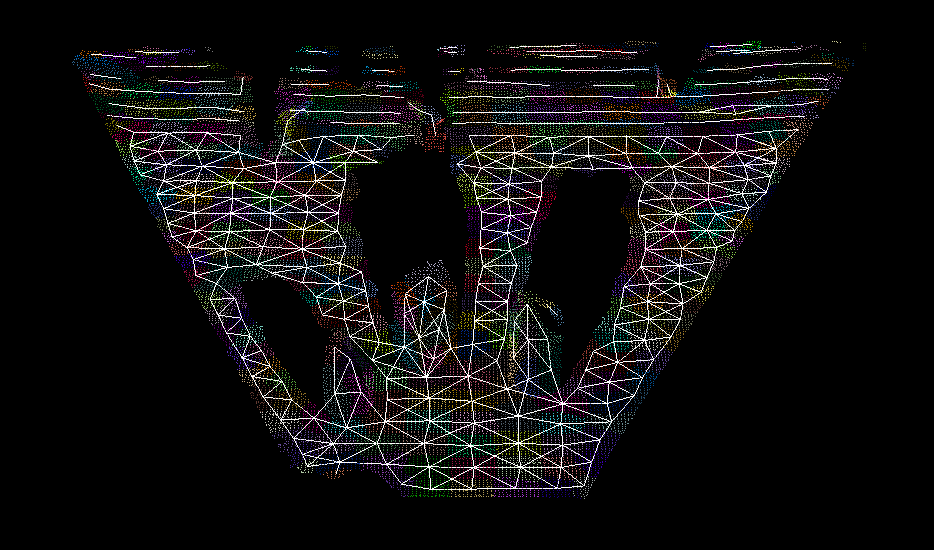
./supervoxel_clustering milk_cartoon_all_small_clorox.pcd --NT -s 0.47
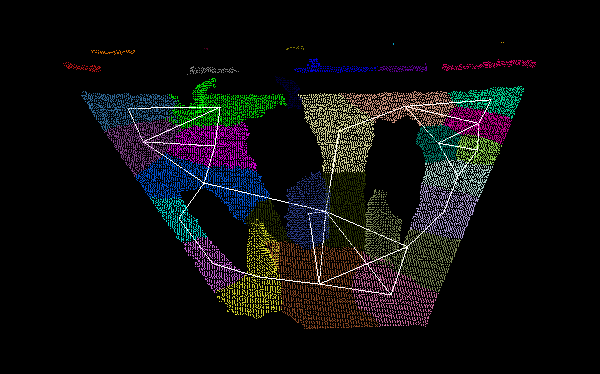
./supervoxel_clustering milk_cartoon_all_small_clorox.pcd --NT -s 0.1
相关文章:
【PCL】(二十八)点云超体素分割
(二十九)点云超体素分割 论文:Voxel Cloud Connectivity Segmentation - Supervoxels for Point Clouds supervoxel_clustering.cpp #include <pcl/console/parse.h> #include <pcl/point_cloud.h> #include <pcl/point_ty…...
Socket通信Demo(Unity客户端和C#)
Socket通信基本流程 首先要启动服务器创建Socket,然后要绑定服务器的一个端口这样客户端通过服务器IP端口号就能连接到服务器了服务器接下来会设置监听队列,监听并等待要连接到它的客户端客户端在服务器启动之后也建立自己的Socket,然后使用…...

Lucene 自定义词库
import org.apache.lucene.analysis.hunspell.Dictionary; import org.apache.lucene.analysis.hunspell.HunspellStemFilter; import...
【LeetCode热题100】73. 矩阵置零(矩阵)
一.题目要求 给定一个 m x n 的矩阵,如果一个元素为 0 ,则将其所在行和列的所有元素都设为 0 。请使用 原地 算法。 二.题目难度 中等 三.输入样例 示例 1: 输入:matrix [[1,1,1],[1,0,1],[1,1,1]] 输出:[[1,0…...
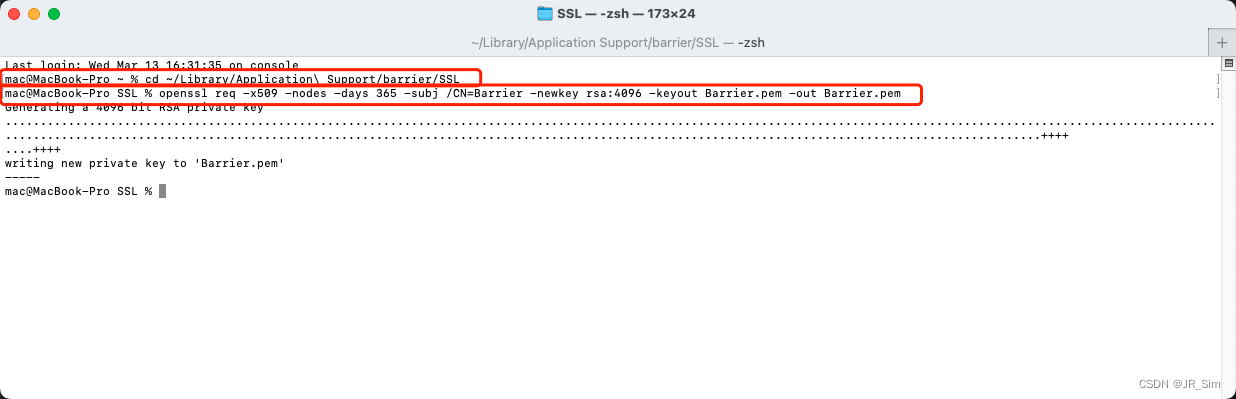
使用Barrier共享鼠标键盘,通过macos控制ubuntu系统
之前文章写过如何使用barrrier通过windows系统控制ubuntu系统,该文章将详细介绍如何使用barrier通过macos系统控制ubuntu系统 一、macOS安装barrier macOS版本barrier链接 1、双击点开安装包 2、将安装包里的barrier拷贝到macOS的达达->应用程序中 3、在达达…...
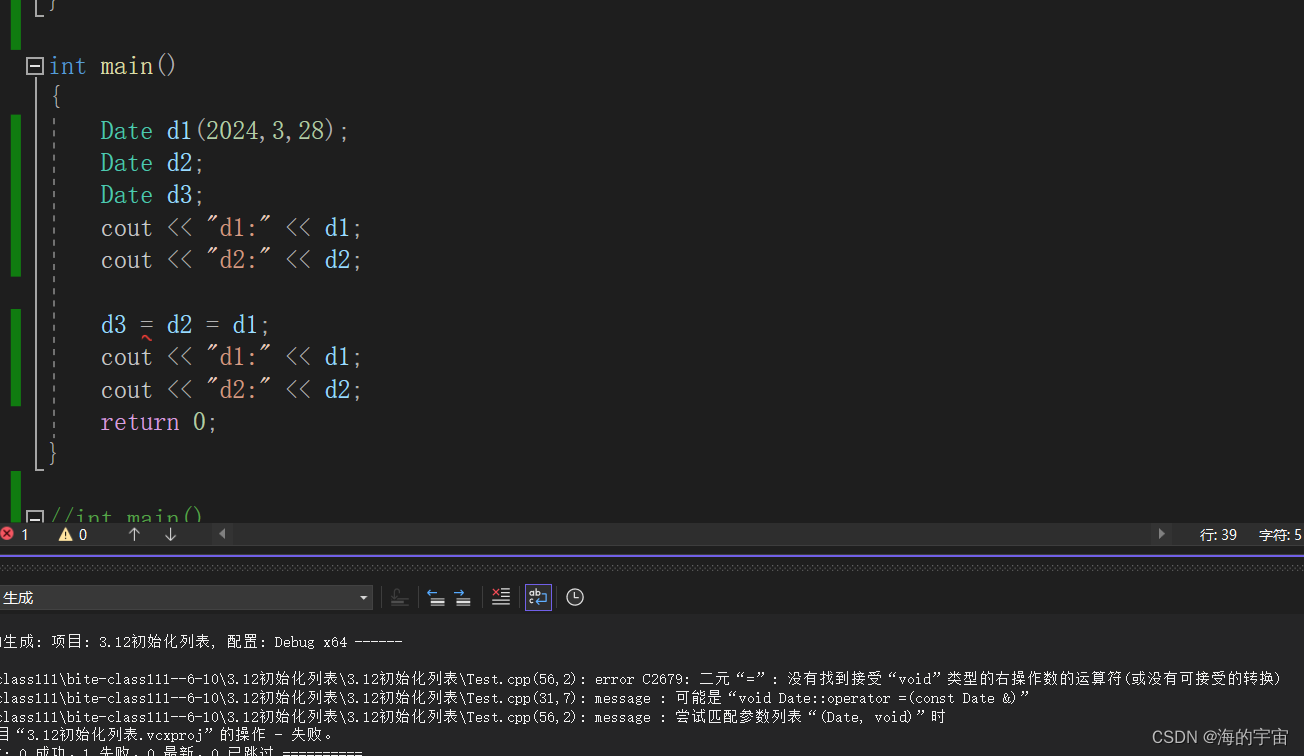
c++:类和对象中:拷贝构造和赋值运算符重载详解
c:类和对象 构造函数和析构函数详解 文章目录 c:类和对象构造函数和析构函数详解 前言一、拷贝构造怎么写拷贝构造1.拷贝构造也是构造函数的一种,构造函数没有值.所以拷贝构造也没有返回值**2.拷贝构造只有一个形参,正常这个形参是自定义类型对象的引用.3. 如果我们没有显示写…...
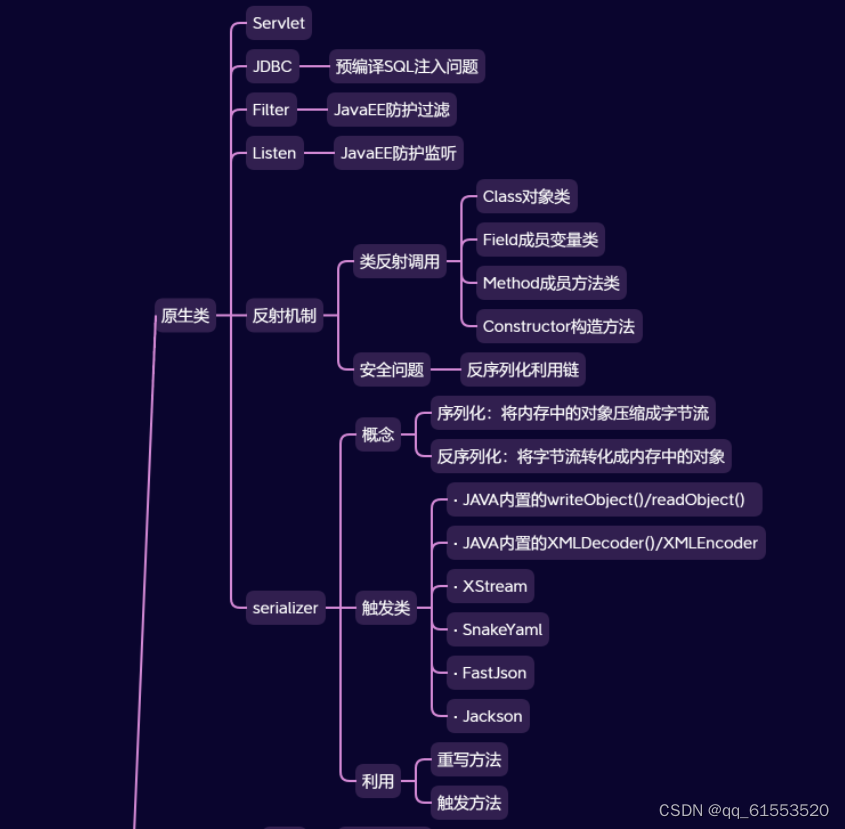
Day33:安全开发-JavaEE应用SQL预编译Filter过滤器Listener监听器访问控制
目录 JavaEE-预编译-SQL JavaEE-过滤器-Filter JavaEE-监听器-Listen 思维导图 Java知识点 功能:数据库操作,文件操作,序列化数据,身份验证,框架开发,第三方库使用等. 框架库:MyBatis&#…...

Log4j如何支持多线程环境?你如何优化Log4j的性能?
Log4j如何支持多线程环境? Log4j 通过其内部设计来支持多线程环境,确保在多线程应用程序中能够安全地使用。以下是 Log4j 支持多线程环境的一些关键方面: 线程安全性: Log4j 的 Logger 类和 Appender 类都是设计为线程安全的。这…...

golang sync.Pool 指针数据覆盖问题
场景 1. sync.Pool设置 var stringPool sync.Pool{New: func() any {return new([]string)}, }func NewString() *[]string {v : stringPool.Get().(*[]string)return v }func PutString(s *[]string) {if s nil {return}if cap(*s) > 2048 {s nil} else {*s (*s)[:0]…...

VUE+内置iframe传值失效问题解决
起因: 公司业务需要计算建筑物截收面积,然后我采用的是openCV来计算,在vue内部引用不了,然后就采用了iframe原生html来完成;功能实现了我想让iframe和vue通信;然后用原有方式试了多次都失败了,i…...
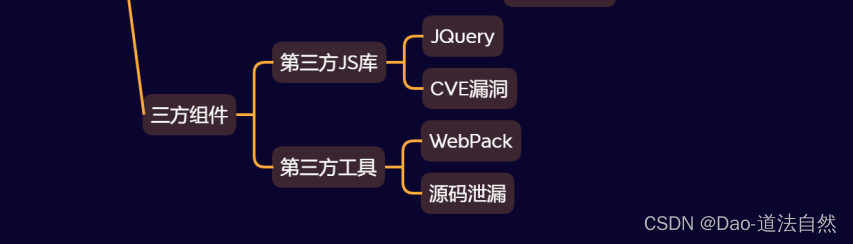
Day31:安全开发-JS应用WebPack打包器第三方库JQuery安装使用安全检测
目录 打包器-WebPack-使用&安全 第三方库-JQuery-使用&安全 思维导图 JS知识点: 功能:登录验证,文件操作,SQL操作,云应用接入,框架开发,打包器使用等 技术:原生开发&…...
回顾api服务和rpc服务的本质)
Go Zero微服务个人探究之路(十六)回顾api服务和rpc服务的本质
目录 前言 正文 API(Application Programming Interface) RPC(Remote Procedure Call) API 与 RPC 的关系 分布式部署 API 和 RPC 结语 前言 go-zero 是一个基于 Go 语言的微服务框架,它提供了一套简洁的编程模…...

基于YOLOv8/YOLOv7/YOLOv6/YOLOv5的夜间车辆检测系统(深度学习代码+UI界面+训练数据集)
摘要:开发夜间车辆检测系统对于自动驾驶技术具有关键作用。本篇博客详细介绍了如何运用深度学习构建一个夜间车辆检测系统,并提供了完整的实现代码。该系统基于强大的YOLOv8算法,并对比了YOLOv7、YOLOv6、YOLOv5,展示了不同模型间…...

Spring体系架构
目录 核心容器(Core Container) 数据访问/集成(Data Access/Integration) Web开发(Web)...
【PLC】现场总线和工业以太网汇总
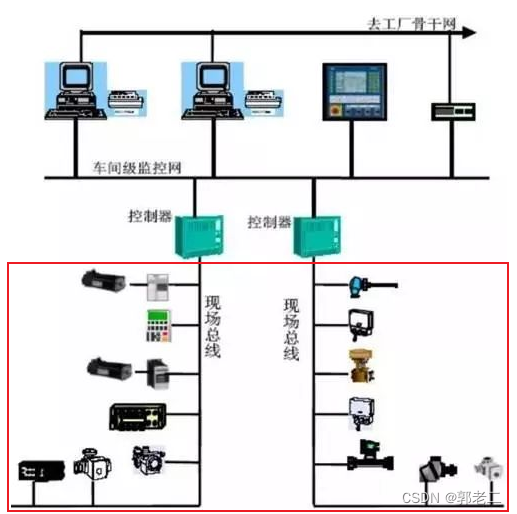
1、 现场总线 1.1 什么是现场总线 1)非专业描述: 如下图:“人机界面”一般通过以太网连接“控制器(PLC)”,“控制器(PLC)”通过 “现场总线”和现场设备连接。 2)专业描述(维基百科) 现场总线…...
【吊打面试官系列】Java虚拟机JVM篇 - 关于JVM分析
大家好,我是锋哥。今天分享关于JVM分析的JVM面试题,希望对大家有帮助; 查看JVM进程号的命令是什么? 可以使用 ps ‐ef 和 jps ‐v 等等。 怎么查看剩余内存? 比如: free ‐m, free ‐h, top 命令等等。 1000道 互联网大厂Jav…...
Mysql锁与MVCC
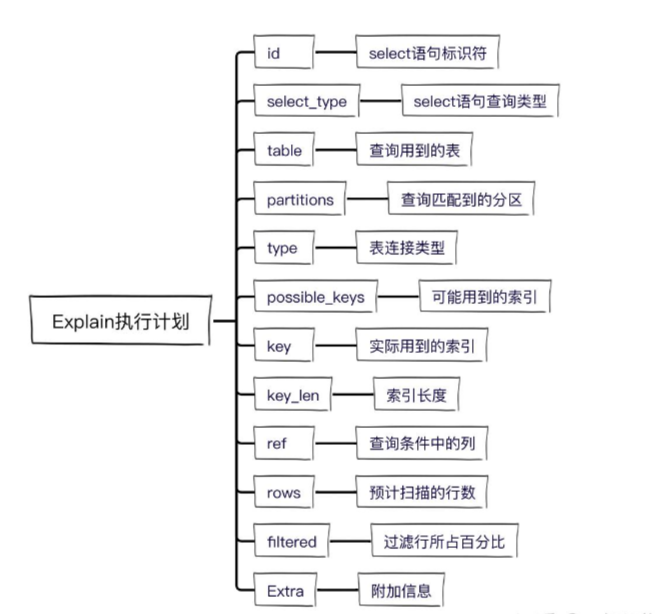
文章目录 Mysql锁的类型锁使用MVCC快照读和当前读读视图【Read View】串行化的解决 exlpain字段解析ACID的原理日志引擎整合SpringBoot博客记录 Mysql锁的类型 MySQL中有哪些锁: 乐观锁(Optimistic Locking):假设并发操作时不会发…...

rancher是什么
Rancher Labs是制作Rancher的公司。Rancher Labs成立于2014年,是一家专注于企业级容器管理软件的公司。它的产品设计旨在简化在分布式环境中部署和管理容器的过程,帮助企业轻松地采用容器技术和Kubernetes。Rancher Labs提供的Rancher平台支持Docker容器…...
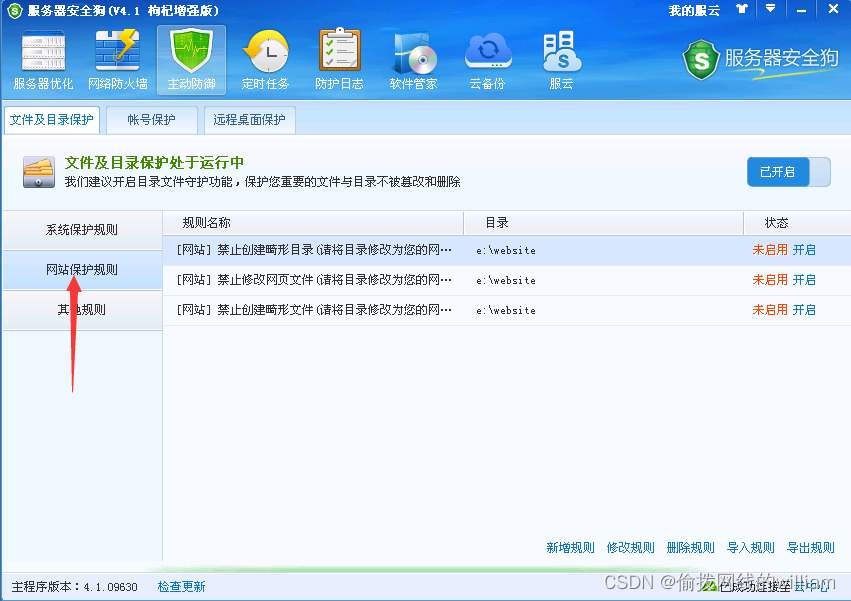
阿里云服务器安全狗免费使用多引擎智能查杀引擎
云服务器具有按量付费、降低综合成本等诸多优势,受到很多企业的欢迎。 因此,目前使用的云服务器越来越多。 阿里云是目前云服务器中最具影响力的品牌,因此选择阿里云服务器的用户数量也是最多的。 那么阿里云服务器需要安装杀毒软件吗&#x…...

使用rust实现九九乘法表
rust目前拥有接近c/c的运行速度以及更快的编码支持,所以是很值得学习得一门语言。rust的语法及设计理念与其他的语言也有许多的不同之处。比如其特有的所有权属性。可以让开发者快速的开发出高效的运行程序。对于内存的管理也有极好的管理方案。 在这里使用rust语言…...

Noto字体终极指南:告别“豆腐块“,让全球文字清晰显示
Noto字体终极指南:告别"豆腐块",让全球文字清晰显示 【免费下载链接】noto-fonts Noto fonts, except for CJK and emoji 项目地址: https://gitcode.com/gh_mirrors/no/noto-fonts 在数字世界中,你是否经常看到那些令人困…...

收藏|2026年AI大模型就业爆发!岗位暴涨12倍、月薪6W+,小白零基础入门指南
2026年,AI已从“科技热点”彻底变为职场“刚需赛道”!脉脉高聘人才智库最新发布的《2026年1-2月中高端人才求职招聘洞察》,用硬核数据揭示行业真相:AI人才成招聘市场顶流,岗位量、薪资双双爆发式增长。尤其对零基础小白…...

LeagueAkari:基于LCU接口的英雄联盟客户端自动化工具深度解析
LeagueAkari:基于LCU接口的英雄联盟客户端自动化工具深度解析 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 功能模块架构与核心技…...

如何用Untrunc拯救损坏视频?2025年终极MP4修复工具完全指南
如何用Untrunc拯救损坏视频?2025年终极MP4修复工具完全指南 【免费下载链接】untrunc Restore a damaged (truncated) mp4, m4v, mov, 3gp video. Provided you have a similar not broken video. 项目地址: https://gitcode.com/gh_mirrors/unt/untrunc 当你…...

怎么理解Filter不是在afterCompetition里面remove掉ThreadLocal里面的东西,而是说在finally块里面remove
文章目录1. 核心原因:Filter 的“套娃(洋葱圈)”执行模型2. 为什么不能(也无法)在这里用 afterCompletion?维度一:Filter 拿不到 afterCompletion维度二:生命周期顺序的致命冲突总结…...

基于BLE模块的低功耗无线遥控器设计与实现
1. 项目概述:基于BLE模块的无线遥控器设计与实现几年前,我在捣鼓智能家居时,一直想找一个低功耗、响应快、又能自己完全掌控的无线遥控方案。市面上的成品要么协议封闭,要么功耗感人,要么延迟高得让人着急。后来&#…...
功能才是宝藏)
Unity Cinemachine相机系统深度使用:除了自动跟随,它的边界限制(Confiner)功能才是宝藏
Unity Cinemachine Confiner:解锁专业级镜头边界控制的实战指南在游戏开发中,镜头控制往往是被低估的艺术。许多开发者对Cinemachine的印象停留在"智能跟随相机"层面,却不知道它的Confiner功能能够彻底改变游戏镜头的专业度。想象一…...

GetStoreApp核心功能解析:离线部署Microsoft Store应用的5大优势
GetStoreApp核心功能解析:离线部署Microsoft Store应用的5大优势 【免费下载链接】GetStoreApp 离线下载 Microsoft Store 商店应用 项目地址: https://gitcode.com/gh_mirrors/ge/GetStoreApp GetStoreApp是一款专为Windows用户设计的离线下载工具ÿ…...

3大核心价值:Python通达信数据接口MOOTDX的完整应用指南
3大核心价值:Python通达信数据接口MOOTDX的完整应用指南 【免费下载链接】mootdx 通达信数据读取的一个简便使用封装 项目地址: https://gitcode.com/GitHub_Trending/mo/mootdx MOOTDX作为一款优秀的Python通达信数据接口封装库,为开发者提供了免…...

代码质量保卫战,从人工Review到DeepSeek自动审查的7天转型全记录
更多请点击: https://kaifayun.com 第一章:代码质量保卫战的范式转移 过去十年,代码质量保障已从“事后拦截”转向“全程共生”。单元测试覆盖率不再是KPI终点,而是开发流程的呼吸节律;静态分析不再停留于CI流水线末尾…...