STM32使用定时器驱动电机
STM32使用定时器驱动电机
- 1、对定时器进行初始化配置
- 1.1、include "encoder.c"文件
- 主函数
1、对定时器进行初始化配置
1.1、include "encoder.c"文件
#include "encoder.h"void TIM4_Encoder_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);// 使能定时器时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //io口使能使用到的捕获编码器AB相借,GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); //推挽输出 ,IO口速度为50MHz//初始化TIM4的时机单元TIM_TimeBaseStructure.TIM_Period = 899; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80KTIM_TimeBaseStructure.TIM_Prescaler =0; //设置用来作为TIMx时钟频率除数的预分频值 不分频TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位//配置对应寄存器为编码器接口模式以及配置相关的输入捕获配置 //THE MODE OF ENCODER TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12,TIM_ICPolarity_Rising, TIM_ICPolarity_Rising); //TIM_ICPolarity_Rising上升沿捕获 TIM_ICStructInit(&TIM_ICInitStructure);TIM_ICInitStructure.TIM_ICFilter=6;TIM_ICInit(TIM4,&TIM_ICInitStructure); // 其实中断可以不用开,因为硬件自行对计数器进行加减。TIM_Cmd(TIM4, ENABLE); //使能TIM4 TIM_SetCounter(TIM4,0);}float HF_Get_Encode_TIM4(void)
{float cnt;cnt = (float)((uint16_t)0x7fff) - (float)((uint16_t)(TIM4->CNT)) ;TIM4->CNT = 0x7fff;return cnt;
}#include "pwm.h"//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM1_PWM_Init(u16 arr,u16 psc)
{ GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);// 使能timer1的时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能port of driver,pb01//电机的两个方向的引脚,一个高电平一个低电平PB01 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //>PB0 端口配置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //通用推挽输出GPIO_Mode_Out_PP GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz,setbits输出高GPIO_Init(GPIOB, &GPIO_InitStructure); GPIO_SetBits(GPIOB,GPIO_Pin_0);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; // GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推 PB1GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //I GPIO_Init(GPIOB, &GPIO_InitStructure); // 输出低GPIO_ResetBits(GPIOB,GPIO_Pin_1);//设置该引脚为复用输出功能,输出TIM1 CH1的PWM脉冲波形 PA8GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //TIM_CH1GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽复用输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80KTIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值TIM_OCInitStructure.TIM_OCPolarity =TIM_OCPolarity_Low; //输出极性:TIM输出比较极性高TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMxTIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能 TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH1预装载使能 TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器TIM_Cmd(TIM1, ENABLE); //使能TIM1}
主函数
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "pwm.h"
#include "usart.h"
#include "encoder.h"
#include "delay.h"int main(void){ int cnt;delay_init(); //延时函数初始化 LED_Init();//初始化与LED连接的硬件接口 TIM1_PWM_Init(899,0);//不分频。PWM频率=72000/(899+1)=80Khz . 电机的频率不得小于10KTIM4_Encoder_Init(899,0);while(1){TIM_SetCompare1(TIM1,600);GPIO_ResetBits(GPIOD,GPIO_Pin_2); delay_ms(100);GPIO_SetBits(GPIOD,GPIO_Pin_2); delay_ms(100);GPIO_SetBits(GPIOD,GPIO_Pin_2);//LED1输出高delay_ms(300); GPIO_ResetBits(GPIOD,GPIO_Pin_2);//LED1输出低delay_ms(300);cnt=HF_Get_Encode_TIM4(TIM4); }
相关文章:

STM32使用定时器驱动电机
STM32使用定时器驱动电机 1、对定时器进行初始化配置1.1、include "encoder.c"文件 主函数 1、对定时器进行初始化配置 1.1、include "encoder.c"文件 #include "encoder.h"void TIM4_Encoder_Init(u16 arr,u16 psc) { GPIO_InitTypeDef GPIO…...
C语言游戏实战(4):人生重开模拟器
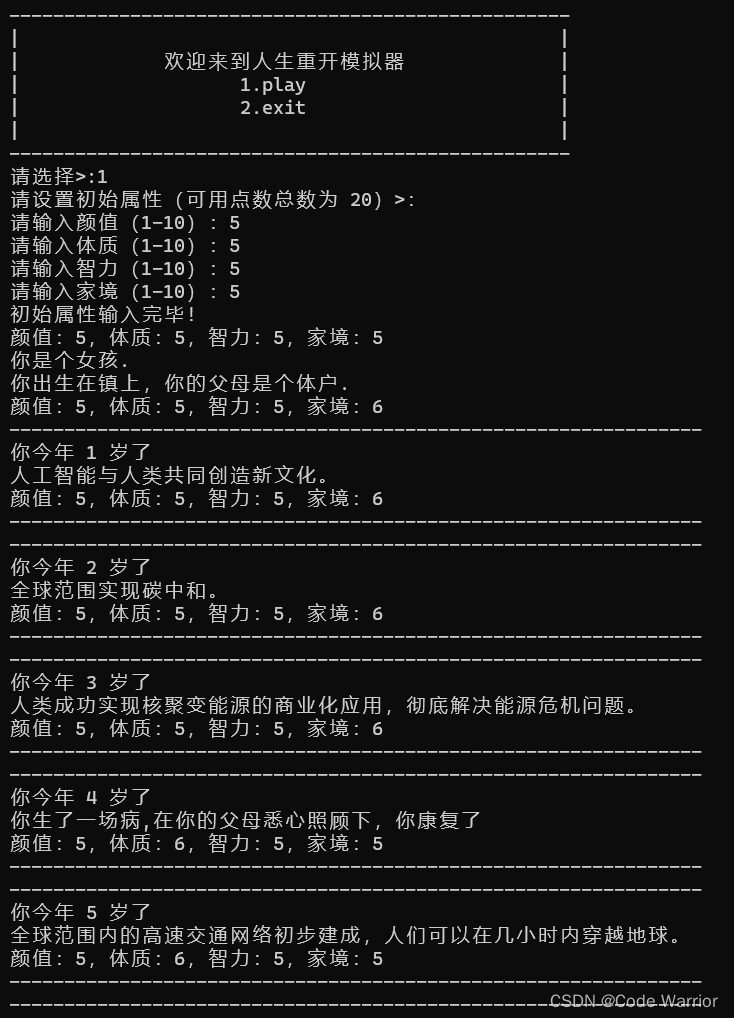
前言: 人生重开模拟器是前段时间非常火的一个小游戏,接下来我们将一起学习使用c语言写一个简易版的人生重开模拟器。 网页版游戏: 人生重开模拟器 (ytecn.com) 1.实现一个简化版的人生重开模拟器 (1) 游戏开始的时…...
MVC架构模式学习笔记(动力节点老杜2022)
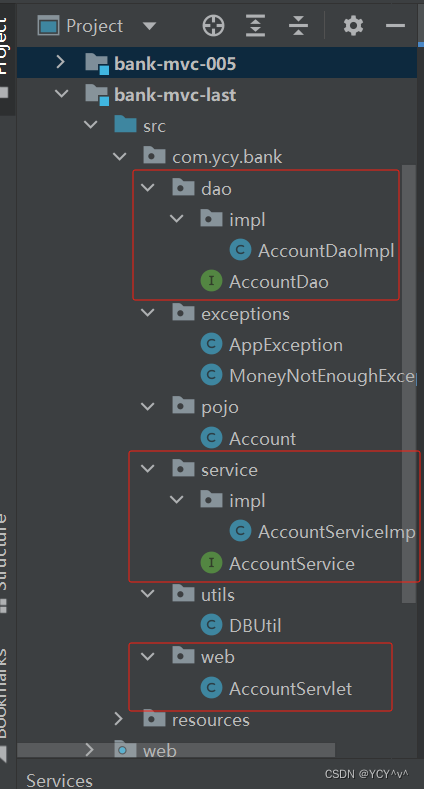
GitHub代码笔记:laodu-mvc: 动力节点学习javaweb中的mvc笔记。 文章目录 1.视频链接 2.不使用MVC架构模式程序存在的缺陷 3.MVC架构模式理论基础 4.JavaEE设计模式-DAO模式 5.pojo & bean & domain 6.业务层抽取以及业务类实现 7.控制层 8.MVC架构模式与三…...
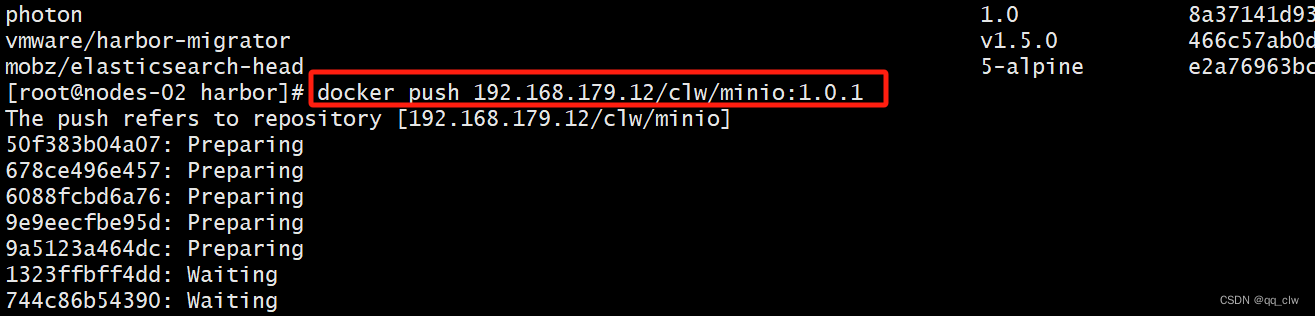
docker常用操作-docker私有仓库的搭建(Harbor),并将本地镜像推送至远程仓库中。
1、docker-compose安装,下载docker-compose的最新版本 第一步:创建docker-compose空白存放文件vi /usr/local/bin/docker-compose 第二步:使用curl命令在线下载,并制定写入路径 curl -L "https://github.com/docker/compos…...

什么是MVC
MVC的全名是Model View Controller,是模型(model)-视图(view)-控制器(controller)的缩写,是一种软件设计典范。它是用一种业务逻辑、数据与界面显示分离的方法来组织代码,将众多的业务逻辑聚集到一个部件里面ÿ…...
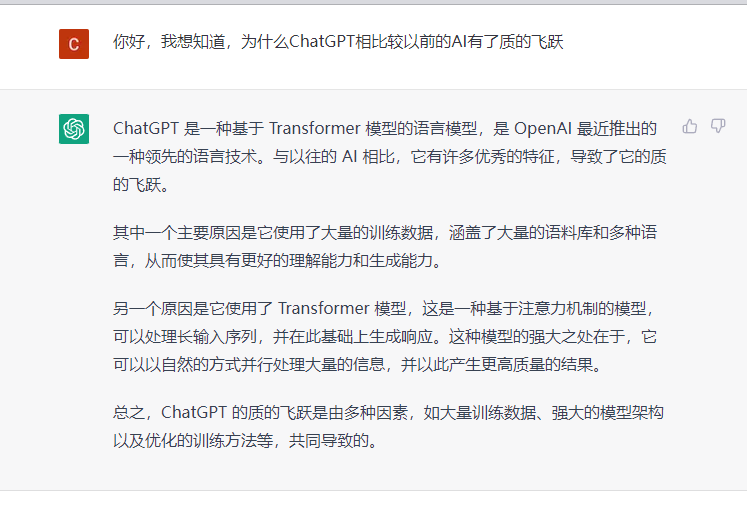
ChatGPT浪潮来袭!谁先掌握,谁将领先!
任正非在接受采访时说 今后职场上只有两种人, 一种是熟练使用AI的人, 另一种是创造AI工具的人。 虽然这个现实听起来有些夸张的残酷, 但这就是我们必须面对的事实 📆 对于我们普通人来说,我们需要努力成为能够掌握…...
Focal and Global Knowledge Distillation forDetectors
摘要 文章指出,在目标检测中,教师和学生在不同领域的特征差异很大,尤其是在前景和背景中。如果我们 平等地蒸馏它们,特征图之间的不均匀差异将对蒸馏产生负面影响。因此,我们提出了局部和全局蒸馏。局部蒸馏分离前景和…...
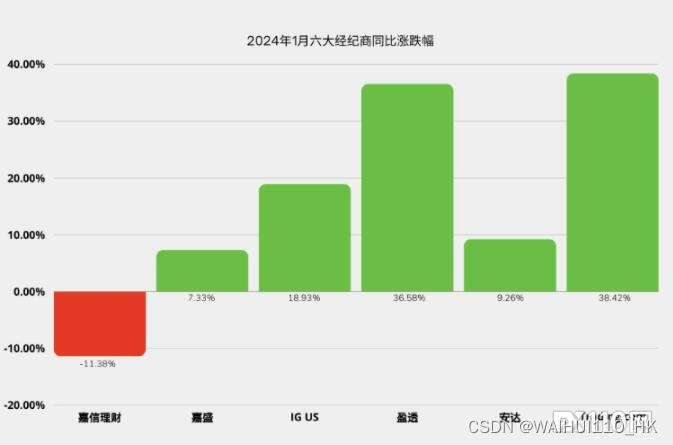
FX110网:1月美国零售货币资金环比上升2.61%,嘉盛环比上升1.86%
美国商品期货交易委员会(CFTC)发布的最新月度报告显示,2024年1月零售货币存款与上月相比上升2.61%。 这份报告涵盖在美国运营的注册零售货币对交易商(RFED)和经纪自营商。包括嘉信理财(CHARLES SCHWAB Futu…...

全量知识系统的核心-全量知识的一个“恰当组织”的构想及百度AI答问
全量知识系统的核心-全量知识的一个恰当组织 Q1. 以下是对 我刚刚完成的文档“全量知识系统的核心:全量知识的一个恰当组织构想”的百度AI答复。由于字数400的限制,内容被分成四段. 第一次回答:学科和科学的框架 关于技术学科、一般学科和…...

C++中using 和 typedef 的区别
C中using 和 typedef 的区别_typedef using-CSDN博客 在C中,“using”和“typedef”执行声明类型别名的相同任务。两者之间没有重大区别。C中的“Using”被认为是类型定义同义词。此方法也称为别名声明。定义这些别名声明的工作方式类似于使用“using”语句定义C中…...
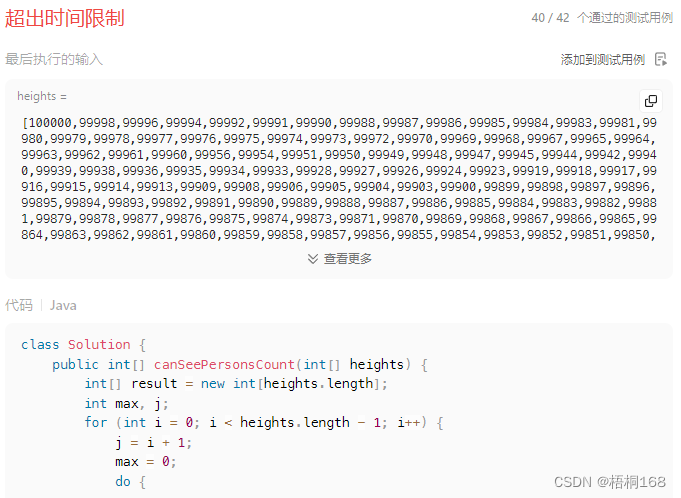
LeetCode-1944题: 队列中可以看到的人数(原创)
【题目描述】 有 n 个人排成一个队列,从左到右 编号为 0 到 n - 1 。给你以一个整数数组 heights ,每个整数 互不相同,heights[i] 表示第 i 个人的高度。一个人能 看到 他右边另一个人的条件是这两人之间的所有人都比他们两人 矮 。更正式的&…...

Java基础面试题整理2024/3/13
1、可以使用switch的数据类型 Java5以前,switch(arg)表达式中,arg只能是byte、short、char、int。 Java5之后引入了枚举类型,也可以是枚举类型。 Java7开始引入了字符串类型。 2、Java中的goto有什么作用 goto是Java中的保留字,…...

MachineSink - 优化阅读笔记
注:该优化与全局子表达式消除刚好是相反的过程,具体该不该做这个优化得看代价模型算出来的结果(有采样文件指导算得会更准确) 该优化过程将指令移动到后继基本块中,以便它们不会在不需要其结果的路径上执行。 该优化过程并非旨在替代或完全…...

虾皮shopee根据ID取商品详情 API
公共参数 名称类型必须描述keyString是免费申请调用key(必须以GET方式拼接在URL中)secretString是调用密钥api_nameString是API接口名称(包括在请求地址中)[item_search,item_get,item_search_shop等]cacheString否[yes,no]默认y…...

你知道数据库有哪些约束吗?
目录 1. NULL约束 2. 唯一(UNIQUE)约束 3. 默认值(DEFAULT)约束 4. 主键约束 5. 外键约束 6. CHECK约束 数据库约束是一种用于确保数据库中数据完整性和一致性的规则或条件。这些约束可以应用于表、列或整个数据库࿰…...
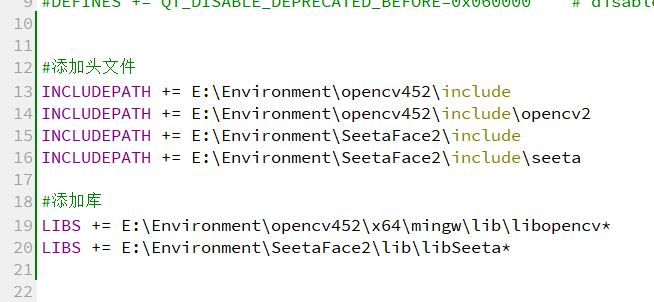
QT----基于QT的人脸考勤系统(未完成)
目录 1 编译opencv库1.1 下载源代码1.2 qt编译opencv1.3 执行Cmake一直卡着data: Download: face_landmark_model.dat 2 编译SeetaFace2代码2.1 遇到报错By not providing "FindOpenCV.cmake" in CMAKE_MODULE_PATH this project has2.2遇到报错Model missing 3 测试…...
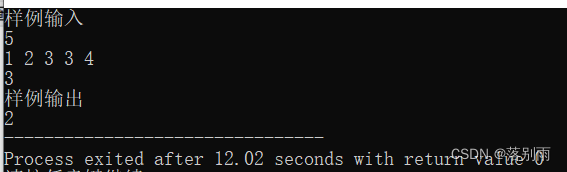
机试:成绩排名
问题描述: 代码示例: #include <bits/stdc.h> using namespace std;int main(){cout << "样例输入" << endl; int n;int m;cin >> n;int nums[n];for(int i 0; i < n; i){cin >> nums[i];}// 排序for(int i 0; i < n; i){//…...

C编程基础四十分笔记
都是一些基础的C语言 一 输入一个整数,计算这个整数有几位二 编写程序计算一个分布函数三 输入一个字符串,再随便输入一个字母,判断这个字母出现几次四 求 1到10的阶乘之和五 求一个球体体积六 写一个链表,存1,2&#…...
k8s关于pod
目录 1、POD 的创建流程 kubectl 发起创建 Pod 请求: API Server 接收请求并处理: 写入 Etcd 数据库: Kubelet 监听并创建 Pod: Pod 状态更新和汇报: 2、POD 的状态解析 1. Pending Pod 2. Running Pod 3. S…...
yum安装mysql 数据库tab自动补全
centos7上面没有mysql,它的数据库名字叫做mariadb [rootlocalhost ~]#yum install mariadb-server -y [rootlocalhost ~]#systemctl start mariadb.service [rootlocalhost ~]#systemctl stop firewalld [rootlocalhost ~]#setenforce 0 [rootlocalhost ~]#ss -na…...
HSTracker:macOS上炉石传说玩家的免费智能助手终极指南
HSTracker:macOS上炉石传说玩家的免费智能助手终极指南 【免费下载链接】HSTracker A deck tracker and deck manager for Hearthstone on macOS 项目地址: https://gitcode.com/gh_mirrors/hs/HSTracker 还在为炉石传说对战中记不住对手卡牌而烦恼吗&#x…...

WSABuilds安装挑战:从“包注册失败“到“架构不匹配“的完整解决指南
WSABuilds安装挑战:从"包注册失败"到"架构不匹配"的完整解决指南 【免费下载链接】WSABuilds Run Windows Subsystem For Android on your Windows 10 and Windows 11 PC using prebuilt binaries with Google Play Store (MindTheGapps) and/o…...

Steam Achievement Manager:5分钟掌握游戏成就管理终极技巧
Steam Achievement Manager:5分钟掌握游戏成就管理终极技巧 【免费下载链接】SteamAchievementManager A manager for game achievements in Steam. 项目地址: https://gitcode.com/gh_mirrors/st/SteamAchievementManager Steam Achievement Manager&#x…...
)
ChatGPT自动回复失效真相:微信API接口变更后,必须重写的4段核心Prompt代码(含防封逻辑)
更多请点击: https://intelliparadigm.com 第一章:ChatGPT公众号运营技巧 在微信生态中,将ChatGPT能力深度融入公众号运营,需兼顾合规性、用户体验与自动化效率。微信官方明确禁止直接调用外部AI接口响应用户消息(如透…...

Android 13 HTTPS抓包失效原因与Proxyman实战解决方案
1. 为什么Android 13上抓HTTPS包突然变难了?从Fiddler/Charles失效说起 你是不是也遇到过:上周还能用Fiddler在Android 12真机上稳稳抓到某电商App的登录接口,升级到Android 13后,所有HTTPS请求全变成“Connection refused”或直接…...

UniversalUnityDemosaics:Unity游戏马赛克移除技术的深度解析与实践指南
UniversalUnityDemosaics:Unity游戏马赛克移除技术的深度解析与实践指南 【免费下载链接】UniversalUnityDemosaics A collection of universal demosaic BepInEx plugins for games made in Unity3D engine 项目地址: https://gitcode.com/gh_mirrors/un/Univers…...

炉石传说HsMod插件:基于BepInEx的终极游戏体验增强工具
炉石传说HsMod插件:基于BepInEx的终极游戏体验增强工具 【免费下载链接】HsMod Hearthstone Modification Based on BepInEx 项目地址: https://gitcode.com/GitHub_Trending/hs/HsMod 炉石传说HsMod是一款基于BepInEx框架开发的开源增强插件,为玩…...

Selenium自动化绕过反爬:彻底清除webdriver指纹的三层策略
1. 为什么“移除 webdriver 标志”成了自动化测试与爬虫绕过的第一道门槛 你有没有遇到过这样的情况:用 Selenium 写好了一套完整的电商比价脚本,本地跑得丝滑流畅,一上服务器或换台新机器就频繁触发验证码,甚至直接返回 403&…...

高光谱成像与机器学习:LDA+SVM/KNN实现蜂蜜植物源精准鉴别
1. 项目概述:当高光谱成像遇上机器学习,如何为蜂蜜“验明正身”?在食品行业,尤其是像蜂蜜这样的高价值农产品领域,“真实性”一直是消费者和生产者共同关注的焦点。一瓶标着“新西兰麦卢卡”或“东北椴树蜜”的蜂蜜&am…...

解锁iOS 17-26.4越狱的3个关键技巧:从新手到专家的完整指南
解锁iOS 17-26.4越狱的3个关键技巧:从新手到专家的完整指南 【免费下载链接】Jailbreak iOS 26.4 - 26, 17 - 17.7.5 & iOS 18 - 18.7.3 Jailbreak Tools, Cydia/Sileo/Zebra Tweaks & Jailbreak News Updates || AI Jailbreak Finder 👇 项目…...