stm32-定时器输出比较PWM
目录
一、输出比较简介
二、PWM简介
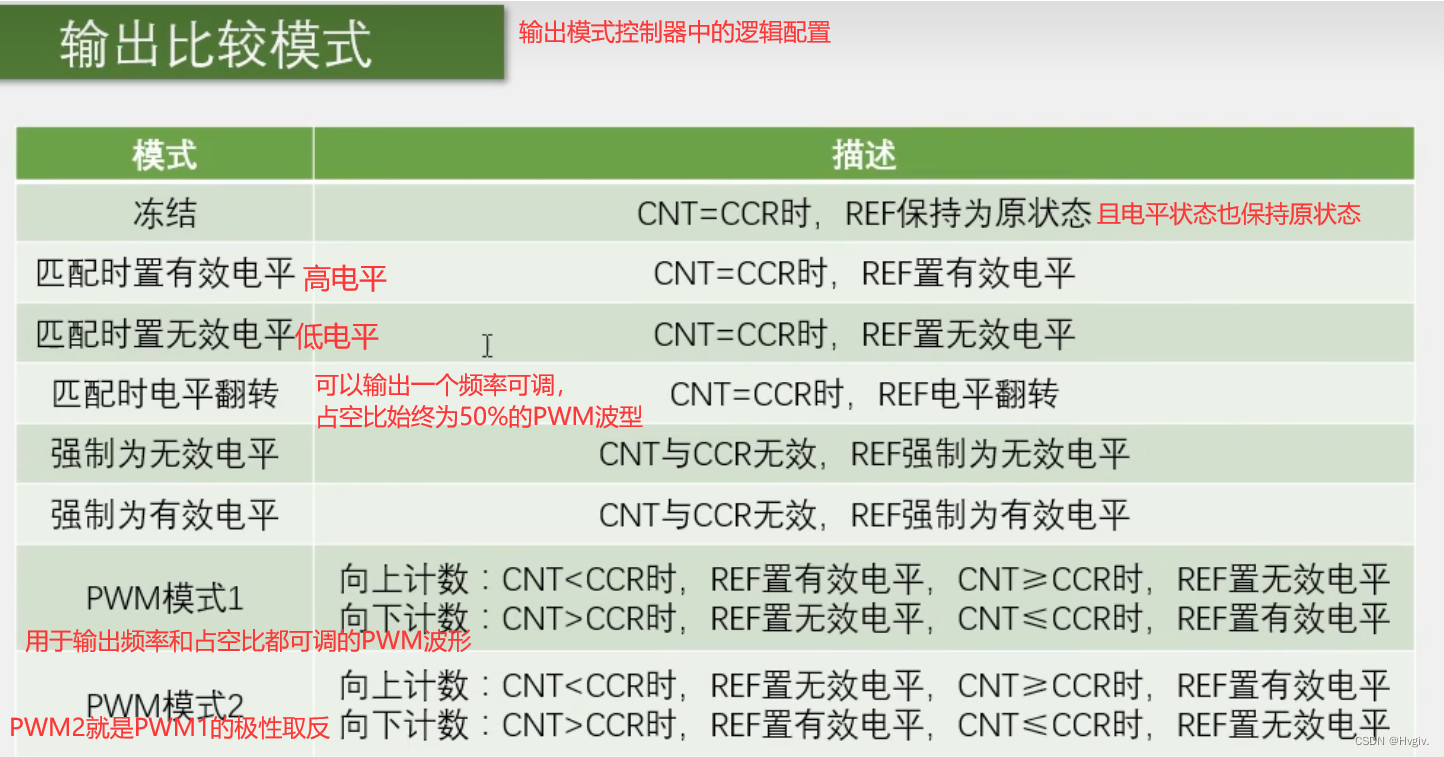
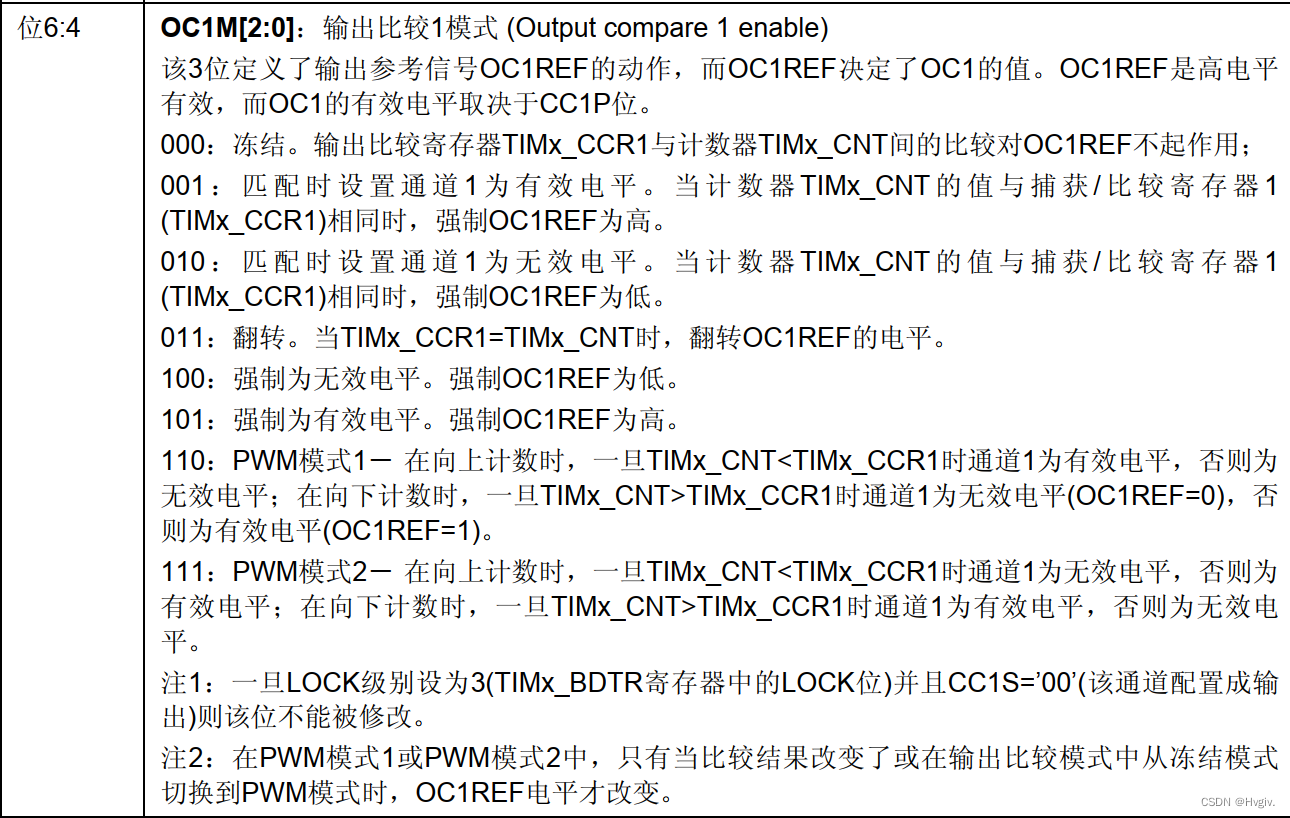
三、输出比较模式实现
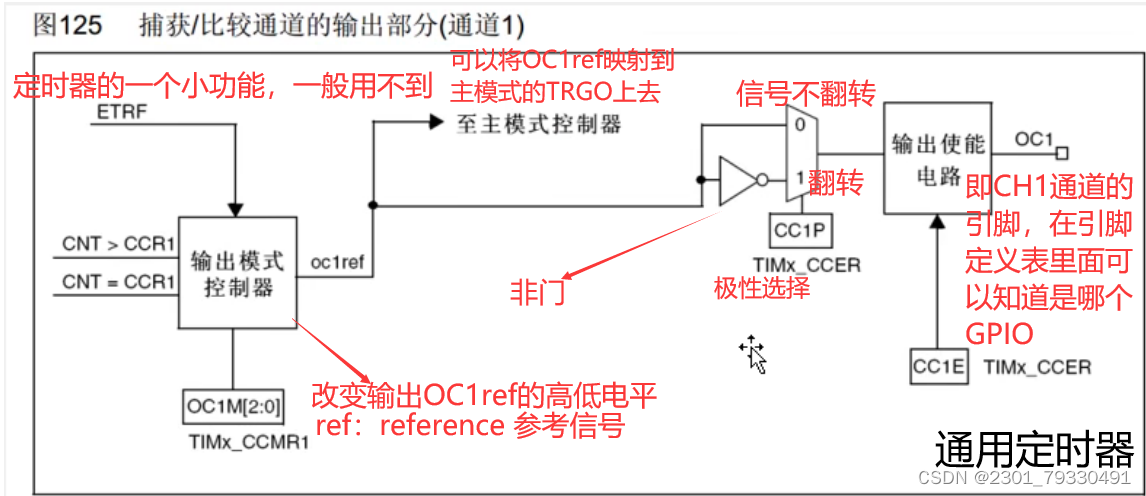
1.输出比较框图(以通用定时器为例)
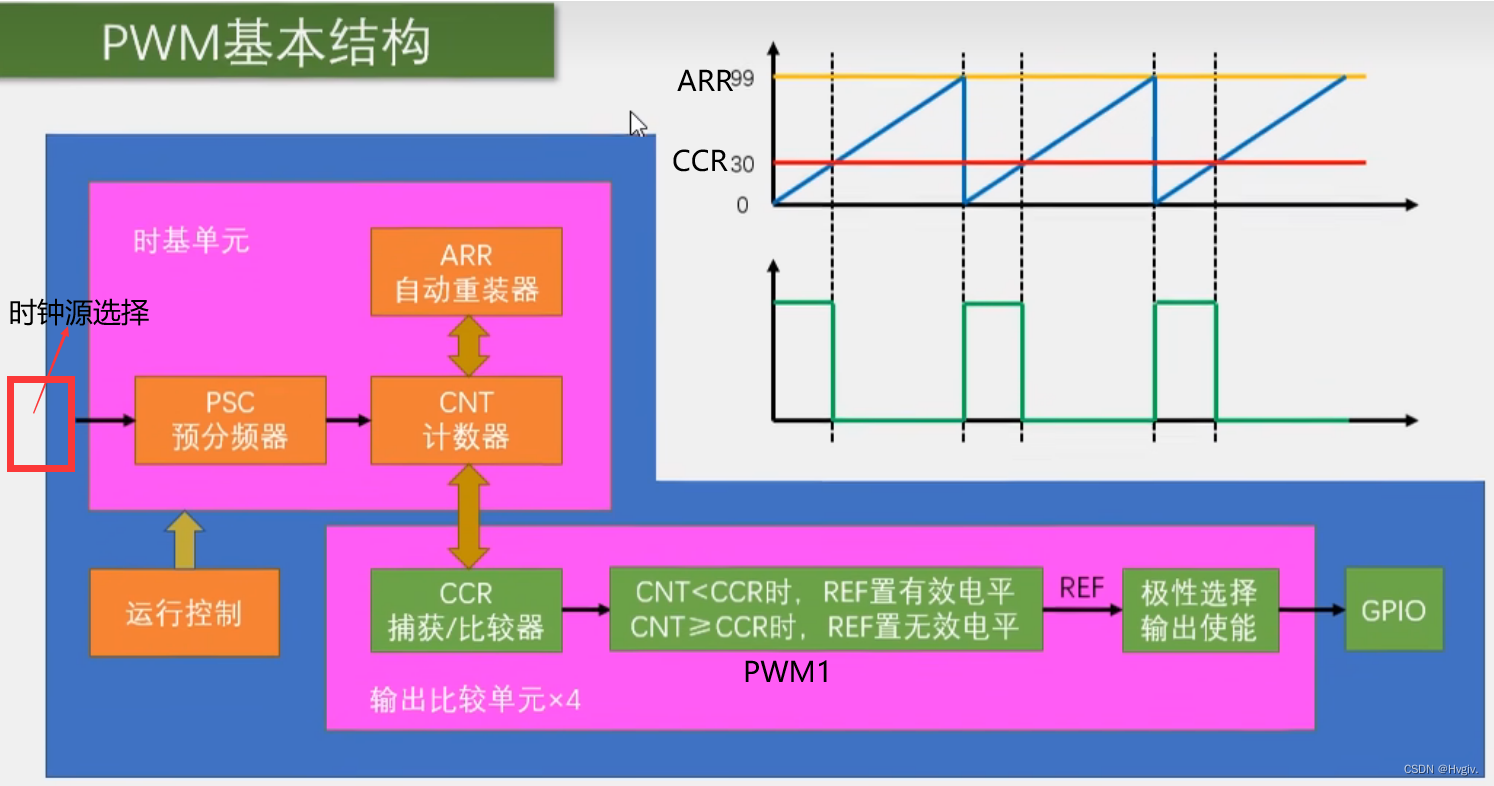
2.PWM基本结构
四、固件库实现
1.程序1:PWM呼吸灯
2.程序2:PWM驱动直流电机
3.程序3:控制舵机
一、输出比较简介
死区生成和互补输出一般用于对电机的控制
二、PWM简介
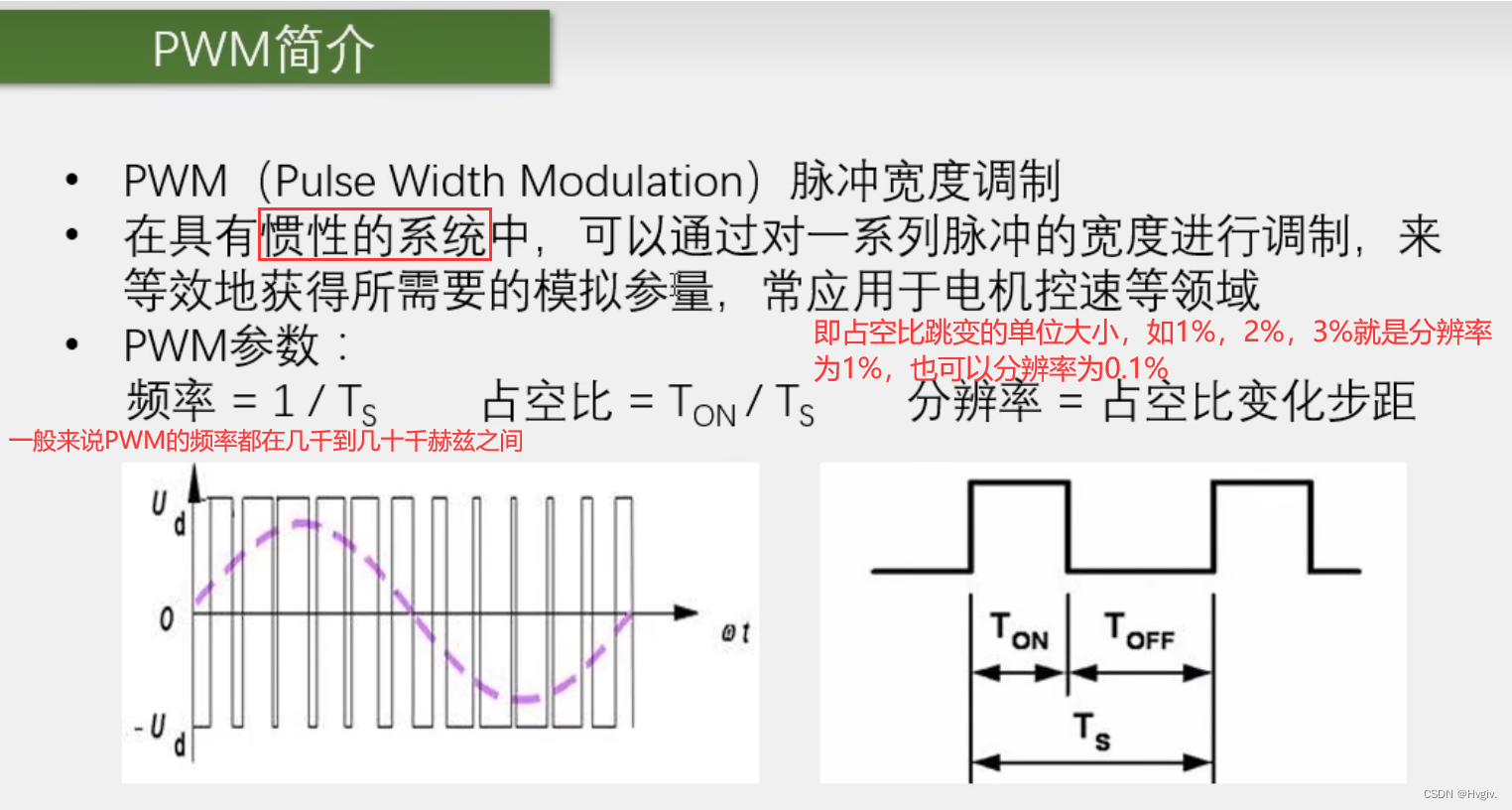
惯性系统:即要能使人眼产生视觉停留的系统
三、输出比较模式实现
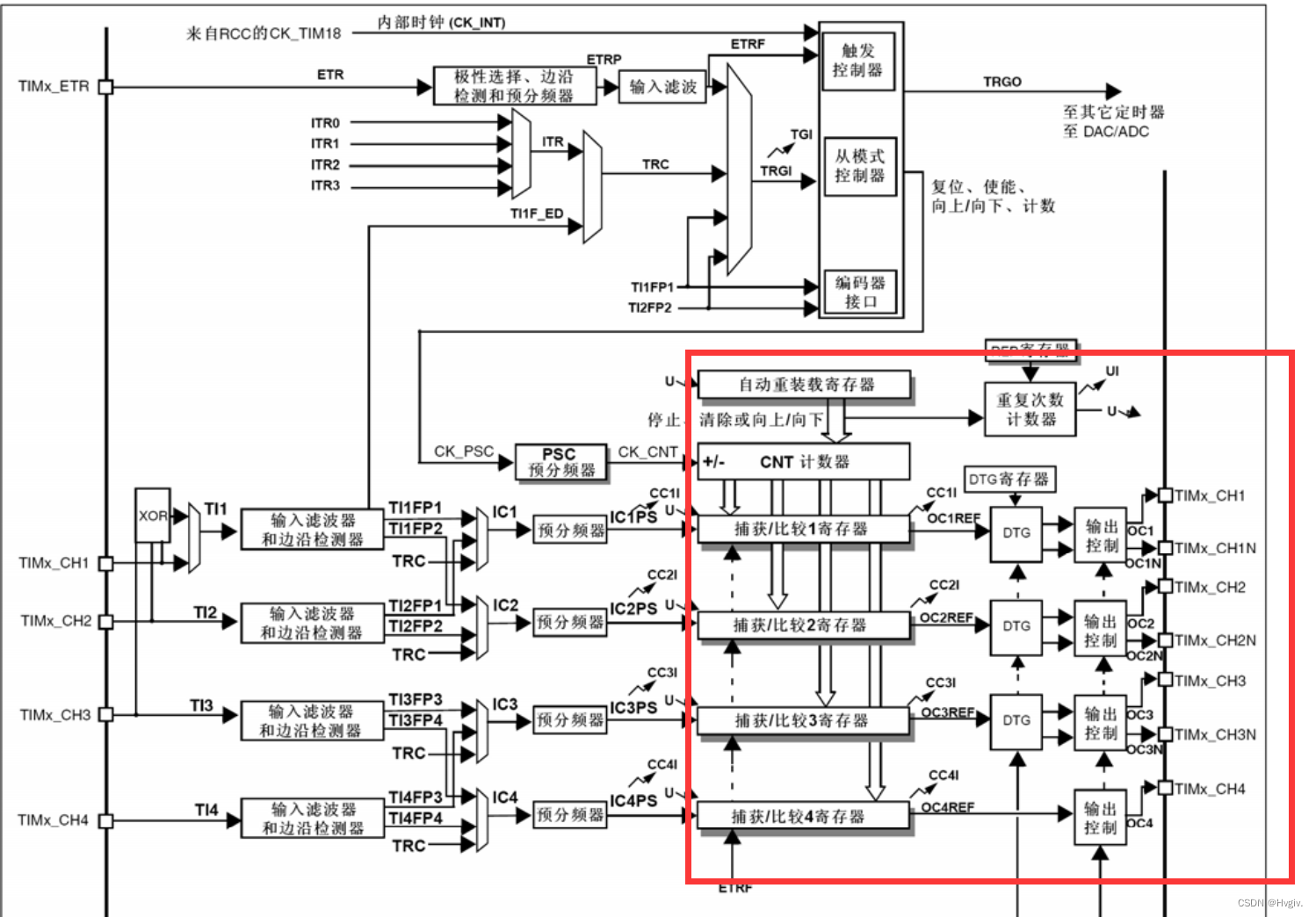
1.输出比较框图(以通用定时器为例)
高级定时器比通用定时器多了个互补输出和死区生成
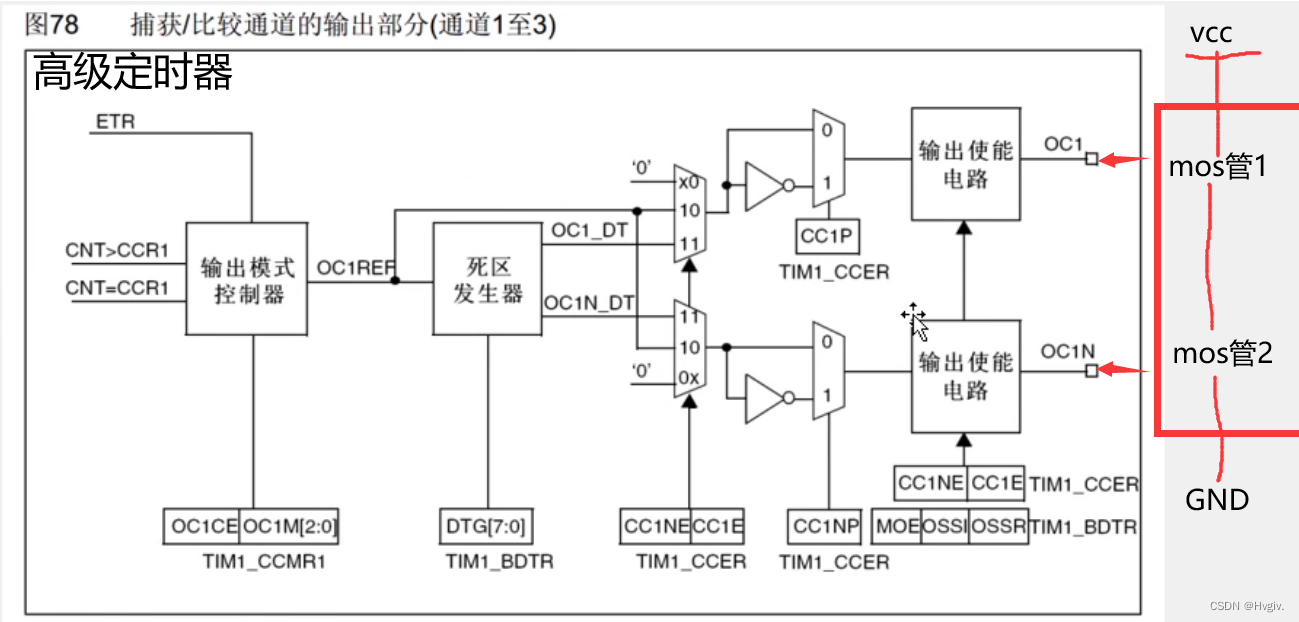
如右图,两个mos管构成了推挽电路,上管导通下管关闭输出高电平,下管导通上管关闭输出低电平,两管都关闭为高阻态,两管都导通为短路,会对元器件造成损伤,所以两管不能同时导通
互补输出:当单片机要控制这个电路时,就需要两个输出端口,且二者电平要相反,即互补,而这里OC1和OC1N就是互补的两个端口,即互补输出
死区发生器:但是若在上管关闭的瞬间下管就导通,很可能由于器件的不理想而出现上下管都导通的情况,为了避免这种情况发生,于是又是死区发生器,即他可以在上管关闭后延迟一段时间再导通下管,避免同时导通
2.PWM基本结构

四、固件库实现
1.程序1:PWM呼吸灯
1.我使用的是TIM3的CH2的重定义引脚PB5,所以要打开AFIO时钟
2.开启TIM3和GPIO的时钟
3.初始化GPIO结构体。注意:要记得使用库函数进行重定义
4.选择TIM3的时钟输入,可以为内部时钟,外部时钟模式1和2,
外部时钟模式1:来源可以是ITR(其他定时器,多用于定时器级联),可以是ETR(外部时 钟),可以是CH1引脚的边沿,CH1引脚和CH2引脚(多用于输入捕获测频率)
外部时钟模式2:ETR的触发控制模式
5.初始化TIM3结构体--配置PSC,ARR,计数模式,等等
6.初始化OC结构体--PWM模式选择,CCR,输出ref的有效电平
7.定时器使能
//使用TIM3的通道2的重定义引脚PB5-指南者上面是红灯
//我们配置
void PWM_Config()
{//首先开启GPIO时钟//开启AFIO时钟,因为用到了重定义RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO,ENABLE);//开启定时器的时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//重定义引脚//选择部分重定义GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);//初始化GPIO结构体-PB5-输出比较GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽,手册可看GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5;GPIO_Init(GPIOB,&GPIO_InitStruct);//选择TIM3的时钟输入TIM_InternalClockConfig(TIM3);//我们直接使用内部时钟//配置TIM结构体TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_Prescaler = 72-1;//PSCTIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//计数模式TIM_TimeBaseInitStruct.TIM_Period = 100-1;//ARRTIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;//输入滤波器的分频TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;//重复计数器,只有高级定时器才有TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStruct);//初始化OC结构体TIM_OCInitTypeDef TIM_OCInitStruct;TIM_OCStructInit(&TIM_OCInitStruct);//先赋初值,因为我们没有把结构体配置完全TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;//模式选择-PWM1TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;//输出使能TIM_OCInitStruct.TIM_Pulse = 0;//CCR,这里我们不配置CCR的值,后面用一个库函数直接在主函数 里面配置,实现呼吸灯TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;//输出ref极性,选择有效电平,即ref有效时输出高电平//TIM_OCInitStruct.TIM_OCNPolarity = ;//TIM_OCInitStruct.TIM_OCIdleState = ;//TIM_OCInitStruct.TIM_OCNIdleState = ;//TIM_OCInitStruct.TIM_OutputNState = ;TIM_OC2Init(TIM3,&TIM_OCInitStruct);//启动定时器TIM_Cmd(TIM3,ENABLE);}void PWM_SetCompare2(uint16_t Compare)
{TIM_SetCompare2(TIM3,Compare);
}
main.c#include "stm32f10x.h" // Device header
#include "bsp_led.h"
#include ".\tim\bsp_tim.h"extern uint16_t Num;//定时器都是16位的int i;
void Delay(u32 i)
{u32 temp;SysTick->LOAD=9000*i; //设置重装数值, 72MHZ时SysTick->CTRL=0X01; //使能,减到零是无动作,采用外部时钟源SysTick->VAL=0; //清零计数器do{temp=SysTick->CTRL; //读取当前倒计数值}while((temp&0x01)&&(!(temp&(1<<16)))); //等待时间到达SysTick->CTRL=0; //关闭计数器SysTick->VAL=0; //清空计数器
}//ARR=99-->PWM一个周期是100,那么分辨率为1%
//占空比 = CCR/(ARR+1)
//频率 = 计数器溢出频率 = CK_PSC/(PSC+1)/(ARR+1) = 72M/720/100= 1000HZ ->1ms
int main()
{LED_GPIO_Config();PWM_Config();while(1){for(i=0;i<=100;i++){PWM_SetCompare2(i);Delay(10);}for(i=100;i>=0;i--){PWM_SetCompare2(i);Delay(10);}}
}2.程序2:PWM驱动直流电机
具体TIM的配置过程同呼吸灯一样,同样是输出不同的PWM占空比来实现电机的不同速度
我们需要三个引脚,一个输出PWM给电机,两个接电机的控制引脚
- 使用PA2输出PWM,AIN1/2接到PA4/5
- 频率设置为1KHZ(可以自己随便设置)
- 定义一个八位有符号的变量Speed,+:正转 -:反转
- 使用GPIO_SetBits/ResetBits();来设置AIN1/2的电平高低
- 使用按键来改变转速
void PWM_Config()
{//开启时钟//使用TIM2的CH3的PA2RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//开启PWM引脚//初始化GPIOGPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽,手册可看GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_4 | GPIO_Pin_5 ;GPIO_Init(GPIOA,&GPIO_InitStruct);//选择时基单元的时钟-为内部时钟--定时器上电后默认是内部时钟,故不写这一个也行TIM_InternalClockConfig(TIM2);//初始化时基单元TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;//配置1KHZ的PWMTIM_TimeBaseInitStruct.TIM_Prescaler = 720-1;//PSC-预分频器TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//向上计数 TIM_TimeBaseInitStruct.TIM_Period = 100-1;//ARR寄存器-重装载寄存器TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;/*不分频----滤波器的采样频率,可以由内部时钟直接提供,也可以由内部时钟加一个时钟分频而来,分频系数就是由TIM_ClockDivision决定*/TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;//重复计数器,只有高级定时器才有TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);//初始化OC-输出比较结构体TIM_OCInitTypeDef TIM_OCInitStruct;TIM_OCStructInit(&TIM_OCInitStruct);//因为结构体里面的成员有些是高级定时器采用得到,所以这里就先全部初始化一遍,然后再配置具体的值TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;//输出比较模式TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;//TIM_OCInitStruct.TIM_Pulse = 50;//CRR TIM_OCInitStruct.TIM_Pulse = 0;//输出要求波型,这里的CRR就不需要了,用固件库的一个函数 TIM_SetCompare3 直接配置CRRTIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;//输出比较极性TIM_OC3Init(TIM2,&TIM_OCInitStruct);//CH3通道//启动定时器TIM_Cmd(TIM2,ENABLE);}//电机控制函数void Motor_SetSpeed(int8_t Speed)//+:正转 -:反转
{if(Speed >= 0){GPIO_SetBits(GPIOA,GPIO_Pin_4);GPIO_ResetBits(GPIOA,GPIO_Pin_5);TIM_SetCompare3(TIM3,Speed);}else {GPIO_ResetBits(GPIOA,GPIO_Pin_4);GPIO_SetBits(GPIOA,GPIO_Pin_5);TIM_SetCompare3(TIM3,-Speed);}
}//主函数#include "stm32f10x.h" // Device header
#include ".\tim\bsp_tim.h"
#include ".\KEY\bsp_key.h"uint8_t KeyNum;
int8_t Speed;int main()
{KEY_GPIO_Config();PWM_Config();while(1){KeyNum = Key_Scan();if(KeyNum == 0){Speed += 20;if(Speed > 100){Speed = -100;}}else if(KeyNum == 1){Speed -= 20;if(Speed < -100){Speed = 100;}}Motor_SetSpeed(Speed);}
}
3.程序3:控制舵机
-TB6612驱动板
VM->STLINK的5v
VCC->面包板3.3v
GND->面包板负极
AO1 AO2 接电机
STBY->待机控制引脚,这里不需要待机,接面包3.3v
AIN1/2-> 任意接两个引脚
PWMA->PWM输出控制引脚
驱动VM放在左下角使用PA2输出PWM,AIN1/2接到PA4/5
- 要点:输出如上图右侧所示的PWM波型
- 指南者的PA0引脚为按键1,所以使用TIM2的CH3通道的PA2
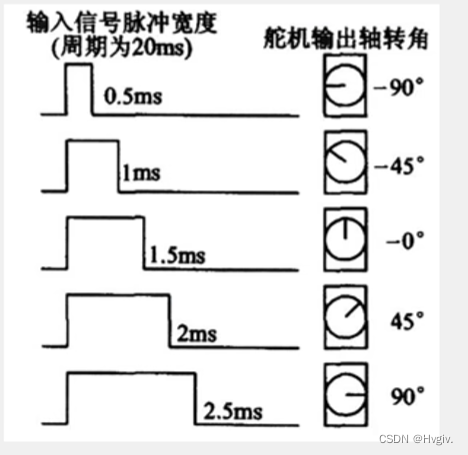
- PWM要求频率为50HZ,即总时间20ms,高电平占0.5~2.5ms,这里我们可以给ARR配置20000-1,PSC配置72-1
- 封装Angle转换函数0-50 180->2500 -->y=Angle/180*2500+50, Angle使用浮点型,利于计算
- 使用按键来改变角度
#include "bsp_tim.h"void PWM_Config()
{//开启时钟//使用TIM2的CH3的PA2RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//开启PWM引脚//初始化GPIOGPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽,手册可看GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2;GPIO_Init(GPIOA,&GPIO_InitStruct);//选择时基单元的时钟-为内部时钟--定时器上电后默认是内部时钟,故不写这一个也行TIM_InternalClockConfig(TIM2);//初始化时基单元TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_Prescaler = 72-1;//PSC-预分频器TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//向上计数 TIM_TimeBaseInitStruct.TIM_Period = 20000-1;//ARR寄存器-重装载寄存器TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;/*不分频----滤波器的采样频率,可以由内部时钟直接提供,也可以由内部时钟加一个时钟分频而来,分频系数就是由TIM_ClockDivision决定*/TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;//重复计数器,只有高级定时器才有TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);//初始化OC-输出比较结构体TIM_OCInitTypeDef TIM_OCInitStruct;TIM_OCStructInit(&TIM_OCInitStruct);//因为结构体里面的成员有些是高级定时器采用得到,所以这里就先全部初始化一遍,然后再配置具体的值TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;//输出比较模式TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;//TIM_OCInitStruct.TIM_Pulse = 50;//CRR --舵机要求设置频率50HZ-即总时间20ms,高电平时间在0.5~2.5ms之间的PWM波型即CCR->500~2500TIM_OCInitStruct.TIM_Pulse = 0;//输出要求波型,这里的CRR就不需要了,用固件库的一个函数 TIM_SetCompare3 直接配置CRRTIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;//输出比较极性TIM_OC3Init(TIM2,&TIM_OCInitStruct);//CH3通道//启动定时器TIM_Cmd(TIM2,ENABLE);
}
//0.5ms-0度 2.5ms-180度
//0度 CCR=500
//180度 CCR=2500
//舵机设置角度,范围0~180
void Servo_SetAngle(float Angle)
{TIM_SetCompare3(TIM2,Angle*2000/180+500);
}void PWM_SetCompare3(uint16_t Compare)//设置CRR
{TIM_SetCompare3(TIM2,Compare);
}
#include "stm32f10x.h" // Device header
#include ".\tim\bsp_tim.h"
#include ".\KEY\bsp_key.h"
uint8_t KeyNum;
float Angle;int main()
{KEY_GPIO_Config();LED_GPIO_Config();PWM_Config();while(1){KeyNum = Key_Scan();if(KeyNum == 0){Angle+=30;if(Angle>180){Angle = 0;}}else if(KeyNum == 1){Angle-=30;if(Angle<0){Angle = 180;}}Servo_SetAngle(Angle);}
}相关文章:
stm32-定时器输出比较PWM
目录 一、输出比较简介 二、PWM简介 三、输出比较模式实现 1.输出比较框图(以通用定时器为例) 2.PWM基本结构 四、固件库实现 1.程序1:PWM呼吸灯 2.程序2:PWM驱动直流电机 3.程序3:控制舵机 一、输出比较简介 死区生成和互补输出一般…...

Redis对过期key的删除策略
假设设置了一批 key 只能存活 1 个小时,那么 1 小时后,redis 是怎么对这批 key 进行删除的? 定期删除 惰性删除 定期删除: redis是默认每隔100ms就随机抽取一些设置了过期时间的key,检查是否过期,如果过期就删除。…...

http的body格式
body数据都通常放在 HTTP 请求的 body 部分。 在 HTTP 请求中,Content-Type 头用于指示 body 中的数据格式。例如,对于 x-www-form-urlencoded 格式的数据,通常会设置 Content-Type: application/x-www-form-urlencoded,而对于 fo…...

Java Web开发从0到1
文章目录 总纲第1章 Java Web应用开发概述1.1 程序开发体系结构1.1.1 C/S体系结构介绍1.1.2 B/S体系结构介绍1.1.3 两种体系结构的比较1.2 Web应用程序的工作原理1.3 Web应用技术1.3.1 客服端应用技术1.3.2 服务端应用技术1.4 Java Web应用的开发环境变量1.5 Tomcat的安装与配置…...
002——编译鸿蒙(Liteos -a)
目录 一、鸿蒙是什么 二、Kconfig 2.1 概述 2.2 编译器 2.3 make使用 本文章引用了很多韦东山老师的教程内容,算是我学习过程中的笔记吧。如果侵权请联系我。 一、鸿蒙是什么 这里我补充一下对鸿蒙的描述 这张图片是鸿蒙发布时使用的,鸿蒙是一个很…...

Ansible--详解
目录 一、Ansible核心组件 二、Ansible配置 1.配置案例 (1)管理安装ansible (2)管理机分发公匙 (3)配置管理 (4)测试连接 2.命令说明 三、playbook剧本编写 1.playbook模板…...

Django和Mysql数据库
Django学习笔记 Django和Mysql数据库 Django开发操作数据库更简单,内部提供了ORM框架。 1)安装mysqlclient pip3 install mysqlclient2)ORM ORM可以帮助我们做两件事: 1.创建、修改、修改数据库中的表(不用写sql语句)[不能创…...
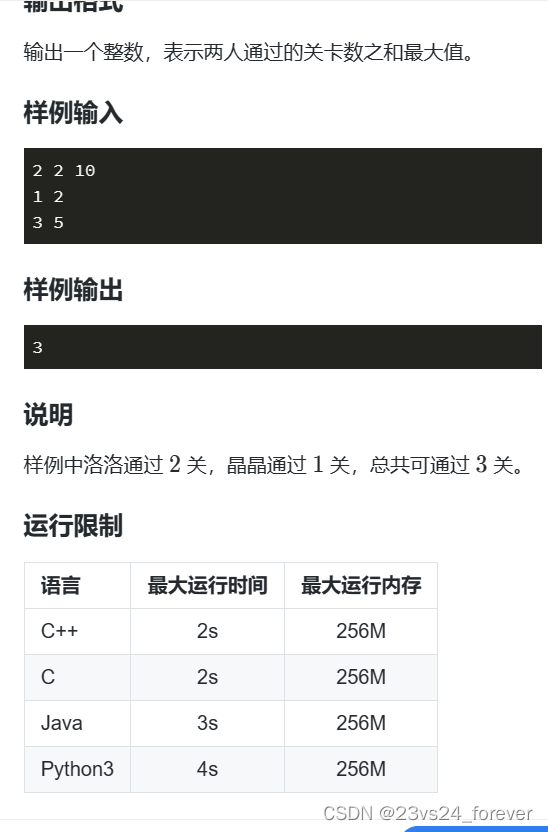
[蓝桥杯]-最大的通过数-CPP-二分查找、前缀和
目录 一、题目描述: 二、整体思路: 三、代码: 一、题目描述: 二、整体思路: 首先要知道不是他们同时选择序号一样的关卡通关,而是两人同时进行两个入口闯关。就是说两条通道存在相同关卡编号的的关卡被通…...

安卓UI面试题 26-30
26. Window和DecorView是什么?DecorView又是如何和Window建立联系的?Window是 WindowManager 最顶层的视图,它负责背景(窗口背景)、Title之类的标准的UI元素, Window是一个抽 象类,整个Android系统中, PhoneWindow是 Window的唯一实现类。 至于 DecorView,它是一个顶级 …...

CPU、GPU、IPU、NPU、TPU、LPU、MCU、MPU、SOC、DSP、FPGA、ASIC、GPP、ECU、
CPU: 中央处理器(Central Processing Unit)是一块超大规模的集成电路,是一台计算机的运算核心(Core)和控制核心( Control Unit)。 它的功能主要是解释计算机指令以及处理计算机软件…...
鸿蒙车载原生开发,拓展新版图
一天内连发“五弹”、HiCar 4.0首次上车 华为鸿蒙狂扩“汽车朋友圈”-上游新闻 汇聚向上的力量 3月15日,在“华为云&华为终端云服务创新峰会2024”上,华为首批汽车行业伙伴广汽传祺、岚图汽车、零跑汽车、凯翼汽车加入鸿蒙生态合作,华为…...

15届蓝桥杯第二期模拟赛题单详细解析
文章目录 🧡🧡t1_求余🧡🧡思路代码 🧡🧡t2_灌水🧡🧡思路代码 🧡🧡t3_字符显示🧡🧡思路代码 🧡🧡t4_区间最大和…...

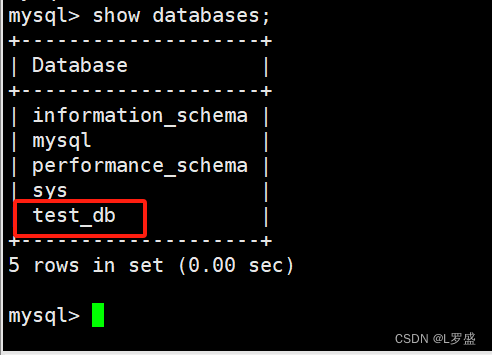
mysql统计数据库大小
ps:亲测可行,时间2024-03-15 15:18 mysql统计数据库大小 要统计MySQL数据库的大小,你可以使用以下SQL查询: SELECT table_schema AS "Database",ROUND(SUM(data_length index_length) / 1024 / 1024, 2) AS "Size (MB)"FROM info…...

centos防火墙firewall-cmd限定特定的ip访问
文章目录 firewall-cmd是什么?启动firewalld服务查看默认区域关闭端口访问添加富规则firewall-cmd的区域概念firewall-cmd的常用选项通用选项:状态选项:永久选项:区域选项: firewall-cmd是什么? firewall-…...

创维汽车与创维光伏储能亮相2024上海AWE,感受制造业的升级变迁
2024年3月14日,中国家电及电子消费博览会在上海正式召开。相比往届展会,2024上海AWE进驻更多行业头部力量,出展更多尖端科技,蕴含更深行业思考。创维光伏储能及乘载更先进智驾科技的创维汽车亮相此次展会。 消费电子的革新不断影响…...

Kafka配置SASL_PLAINTEXT权限。常用操作命令,创建用户,topic授权
查看已经创建的topic ./bin/kafka-topics.sh --bootstrap-server localhost:9092 --list 创建topic 创建分区和副本数为1的topic ./bin/kafka-topics.sh --create --bootstrap-server localhost:9092 --topic acltest --partitions 1 --replication-factor 1 创建kafka用户 …...

[Java、Android面试]_05_内存泄漏和内存溢出
本人今年参加了很多面试,也有幸拿到了一些大厂的offer,整理了众多面试资料,后续还会分享众多面试资料。 整理成了面试系列,由于时间有限,每天整理一点,后续会陆续分享出来,感兴趣的朋友可关注收…...
MySQL-HMA 高可用故障切换
本章内容: 了解MySQL MHA搭建MySQL MHAMySQL MHA故障切换 1.案例分析 1.1.1案例概述 目前 MySQL 已经成为市场上主流数据库之一,考虑到业务的重要性,MySQL 数据库 单点问题已成为企业网站架构中最大的隐患。随着技术的发展,MHA…...
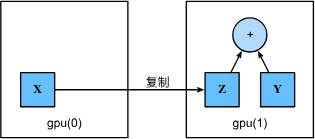
深度学习 精选笔记(11)深度学习计算相关:GPU、参数、读写、块
学习参考: 动手学深度学习2.0Deep-Learning-with-TensorFlow-bookpytorchlightning ①如有冒犯、请联系侵删。 ②已写完的笔记文章会不定时一直修订修改(删、改、增),以达到集多方教程的精华于一文的目的。 ③非常推荐上面(学习参考&#x…...
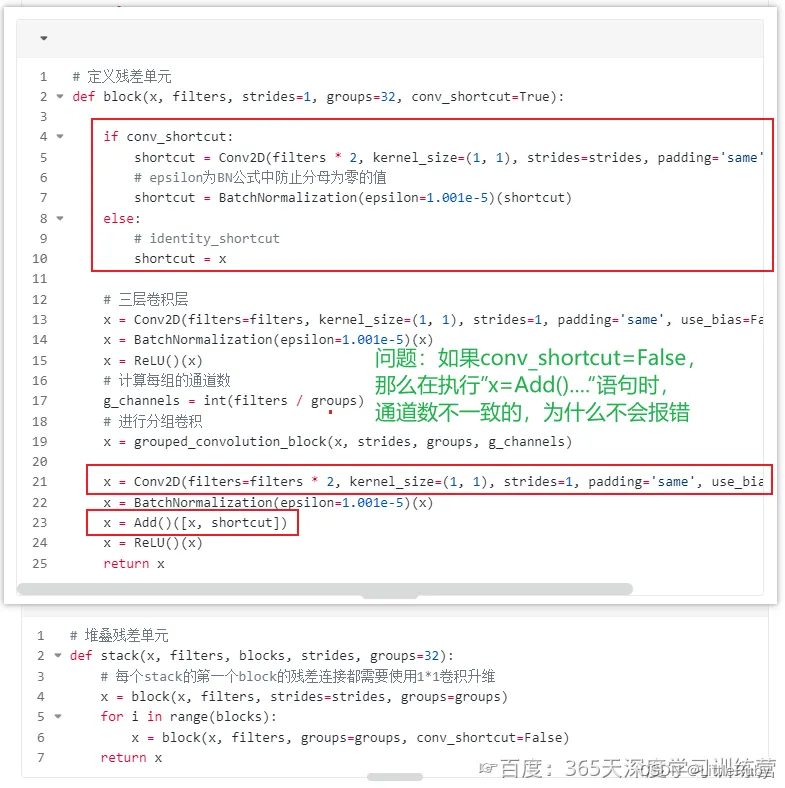
深度学习 Day27——J7对于ResNeXt-50算法的思考
🍨 本文为🔗365天深度学习训练营 中的学习记录博客🍖 原作者:K同学啊 | 接辅导、项目定制🚀 文章来源:K同学的学习圈子 文章目录 前言问题分析 前言 关键问题:ResNeXt-50中conv_shortcutFalse时…...

智在记录 AI 语音转写效果实测与场景价值展示
在日常的高强度工作与学习中,我们常常面临一个共同的痛点:信息输入的速度远远超过了我们消化和记录的能力。无论是长达两小时的部门战略会议,还是节奏飞快的在线网课,亦或是需要精准捕捉细节的医疗问诊,传统的“笔头记…...

如何用Red Panda Dev-C++打造轻量高效的C++开发环境
如何用Red Panda Dev-C打造轻量高效的C开发环境 【免费下载链接】Dev-CPP A greatly improved Dev-Cpp 项目地址: https://gitcode.com/gh_mirrors/dev/Dev-CPP 在当今C开发工具日益臃肿的背景下,Red Panda Dev-C以其轻量级架构和现代化功能,为开…...
)
Codex入门第一步,5个基础设置,修改后让性价比翻倍!(附通用提示词模板)
开篇Codex App 主界面:对话框底部显示权限档位、工作区、本地模式和分支信息 Codex 现在不只是程序员的工具——不少非技术背景的职场人把它当"数字同事":整理文件、查资料、跑浏览器抓数据。 但十个有八个,装好之后还是对着对话框…...

5-8倍加速:ncnn 3×3卷积模块
5-8倍加速:ncnn 33矩阵卷积模块 我把腾讯ncnn的33卷积从手工循环替换成了自己的算法(Im2Col GEMM),实测加速5到8倍。 适用于大通道数(inch≥16, outch≥32)、大分辨率特征图、服务端推理场景。小通道建议…...

别再让FFT精度拖后腿了!手把手教你用三点插值法把频率估计误差降到最低
别再让FFT精度拖后腿了!手把手教你用三点插值法把频率估计误差降到最低 在音频调谐器里校准乐器音高时,工程师发现440Hz的标准音高在1024点FFT中总是显示为439.2Hz;5G基站接收端解调时,载波频率的微小偏移导致误码率飙升ÿ…...

深度学习的五大硬边界:数据饥渴、因果失语、鲁棒性脆性、可解释性黑洞与泛化围栏
1. 这不是“AI不行了”,而是你该看清深度学习真正能做什么、不能做什么“Limitations of Deep Learning”这个标题,乍一看像篇学术综述的冷门小节,但在我过去十年带团队落地近百个AI项目的过程中,它其实是每个工程师、产品经理甚至…...
)
平衡小车PID调参新思路:用合宙ESP32-C3的BLE功能实现无线数据收发(附完整Arduino代码)
平衡小车无线PID调参实战:基于ESP32-C3 BLE的实时数据交互方案 调试平衡小车时,最令人头疼的莫过于反复插拔USB线修改PID参数。我曾经历过这样的场景:小车在桌面上左右摇摆,我蹲在地上盯着串口数据,每次修改参数都要暂…...
)
避坑指南:在Quartus II里搞定矩阵键盘与数码管,这些细节决定成败(附代码)
Quartus II实战避坑:矩阵键盘与数码管调试的七个致命细节 第一次在FPGA上实现矩阵键盘控制数码管显示时,我遇到了所有初学者都会踩的坑——按下按键后数码管要么毫无反应,要么显示乱码。这不是代码逻辑问题,而是那些教程里从不提及…...

5分钟解锁AI智能助手:Qwen-Agent模型配置完全指南
5分钟解锁AI智能助手:Qwen-Agent模型配置完全指南 【免费下载链接】Qwen-Agent Agent framework and applications built upon Qwen>3.0, featuring Function Calling, MCP, Code Interpreter, RAG, Chrome extension, etc. 项目地址: https://gitcode.com/Git…...

ARM处理器命名后缀解析与技术演进
1. ARM处理器命名后缀解析:从TDMI-S到T2F-S的技术演进作为一名长期从事嵌入式开发的工程师,我经常需要查阅ARM处理器的技术文档。初次接触ARM7TDMI-S、ARM926EJ-S这类命名时,那些神秘的字母后缀确实让人困惑。今天我们就来彻底拆解这些命名背…...