[Qt学习笔记]Qt下使用Halcon实现采图时自动对焦的功能(Brenner梯度法)
目录
- 1、介绍
- 2、实现方法
- 2.1 算法实现过程
- 2.2 模拟采集流程
- 3、总结
- 4、代码展示
1、介绍
在机器视觉的开发中,现在有很多通过电机去做相机的聚焦调节,对比手工调节,自动调节效果更好,而且其也能满足设备自动的需求,尤其在一些高倍成像的环境下应用场景更广泛,图像清晰度是衡量图像质量的一个重要的指标,手动调焦的过程是通过人为去判定图像的清晰度,调节镜头的焦距,使得图像从模糊到清洗,再到模糊的过程,确定清洗度的峰值,自动调焦就是通过算法对采集的每一张图像的清晰度进行评价,最终给出图像清晰的峰值,从而确定调焦获取的焦距最佳。
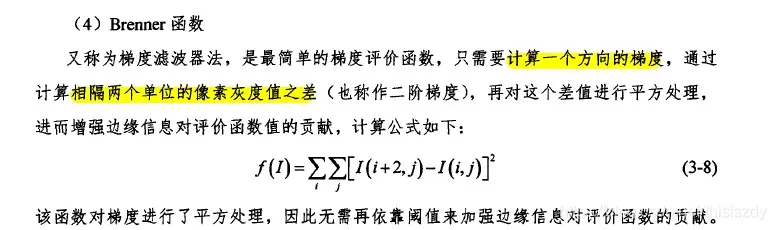
常见的图像清晰度评价一般都是基于梯度的方法,本文主要介绍Brenner梯度法。
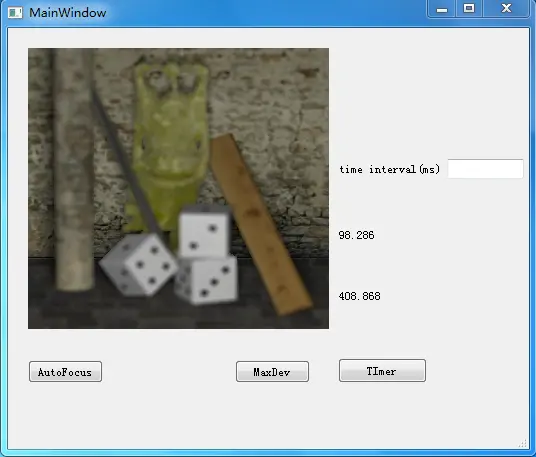
本节使用了30张不同清晰度的图像来模拟相机采图时从对焦模糊到清晰再到模糊的过程。
2、实现方法
2.1 算法实现过程
void MainWindow::AutoFocus(HObject ho_Image)
{HObject ho_ImagePart00, ho_ImagePart20;HObject ho_ImageSub, ho_ImageResult, ho_ImagePart01, ho_ImagePart10;HObject ho_ImageSub1, ho_ImageResult1, ho_ImageSub2, ho_ImageResult2;HTuple hv_I, hv_Width, hv_Height, hv_WindowID;HTuple hv_Value, hv_Deviation;try{GetImageSize(ho_Image,&hv_Width,&hv_Height);CropPart(ho_Image, &ho_ImagePart00, 0, 0, hv_Width, hv_Height-2);ConvertImageType(ho_ImagePart00, &ho_ImagePart00, "real");CropPart(ho_Image, &ho_ImagePart20, 2, 0, hv_Width, hv_Height-2);ConvertImageType(ho_ImagePart20, &ho_ImagePart20, "real");SubImage(ho_ImagePart20, ho_ImagePart00, &ho_ImageSub, 1, 0);MultImage(ho_ImageSub, ho_ImageSub, &ho_ImageResult, 1, 0);Intensity(ho_ImageResult, ho_ImageResult, &hv_Value, &hv_Deviation);double d=hv_Deviation.D();QString strDev=QString::number(d,'f',3);ui->labDev->setText(strDev);//记录最大偏差值if(hv_PreDeviation<hv_Deviation){hv_PreDeviation=hv_Deviation;}}catch(HalconCpp::HException &except){qDebug()<<except.ProcName().Text()<<endl;qDebug()<<except.ErrorMessage().Text()<<endl;qDebug()<<except.ErrorCode()<<endl;}
}
如Brenner算法的公式所示,首先将图像转换成real类型,然后对图像进行图像差处理,然后进行图像乘积,最后获得平均值及偏差,把偏差作为清晰度的评价参数
2.2 模拟采集流程
这里创建一个线程,然后使用延时的定时器,从文件夹中依次读取30张图像,每张图像进行Brenner算法处理。
线程定义如下:
camera = new CameraCtrl();liveThread = new QThread();camera->moveToThread(liveThread);connect(liveThread,&QThread::finished,camera,&QObject::deleteLater);connect(this,&MainWindow::ContinuousGrab,camera,&CameraCtrl::HandleContinuousGrab);liveThread->start();
然后线程开始后进行连续读取图像处理流程
//读取图像并调用Brenner算法函数
void CameraCtrl::HandleContinuousGrab()
{ HTuple hv_I;HObject ho_Image; for (hv_I=1; hv_I<=30; hv_I+=1){ReadImage(&ho_Image, ("E:/Qt_Test/AutoFacus/Buddha/"+hv_I)+".png");Delay_MSec(tInter);emit hobjectReady(ho_Image);if(isFocus==true){emit hobjectFocus(ho_Image);}}
}
其中定义延时定时器
void CameraCtrl::Delay_MSec(unsigned int msec)
{QEventLoop loop;//定义一个新的事件循环QTimer::singleShot(msec, &loop, SLOT(quit()));//创建单次定时器,槽函数为事件循环的退出函数loop.exec();//事件循环开始执行,程序会卡在这里,直到定时时间到,本循环被退出
}
3、总结
一个好的评价函数需要具有单峰性,无偏性,灵敏性,常见的图像清晰度评价的算法有多种,比如Brenner梯度法、Tenegrad梯度法、laplace梯度法、方差法、能量梯度法等等,本节只介绍了Brenner梯度法,目前反馈的Brenner梯度法效果较好,以后有机会会介绍一下其他的方法。
4、代码展示
本小例程的代码放到我的开源gitte项目里,欢迎一起学习,也希望能收获你的小星星。
AutoFacus源码
相关文章:
[Qt学习笔记]Qt下使用Halcon实现采图时自动对焦的功能(Brenner梯度法)
目录 1、介绍2、实现方法2.1 算法实现过程2.2 模拟采集流程 3、总结4、代码展示 1、介绍 在机器视觉的开发中,现在有很多通过电机去做相机的聚焦调节,对比手工调节,自动调节效果更好,而且其也能满足设备自动的需求,尤…...

常州IGM机器人RTE497的日常维修保养方法
一、IGM机器人RTE497日常检查 每日工作前,进行以下检查: 外观检查:确认IGM机器人RTE497本体无明显损伤,各部件连接稳固。 电缆检查:检查所有电缆、气管等是否完好,无磨损、无挤压。 润滑检查:确…...

如何利用机器学习和Python编写预测模型来预测设备故障
预测设备故障是机器学习和数据科学的一个常见问题,通常可以通过以下几个步骤来解决: 1. 数据收集 首先,需要收集与设备运行相关的数据,包括: 设备的历史数据环境数据(如温度、湿度等)使用时间…...

mysql部署(2)主从复制
在前面的基础上,现有26、41两个mysql8的实例,下面以26为主41为从搭建主从复制: 机器主从端口号root密码主从复制账号密码xxx.xx.xxx.26主3306Mysql#26user1/user1#26xxx.xx.xxx.41从3306Mysql#41 一、master主库配置 1、修改mysql配置文件…...
FX-数组的使用
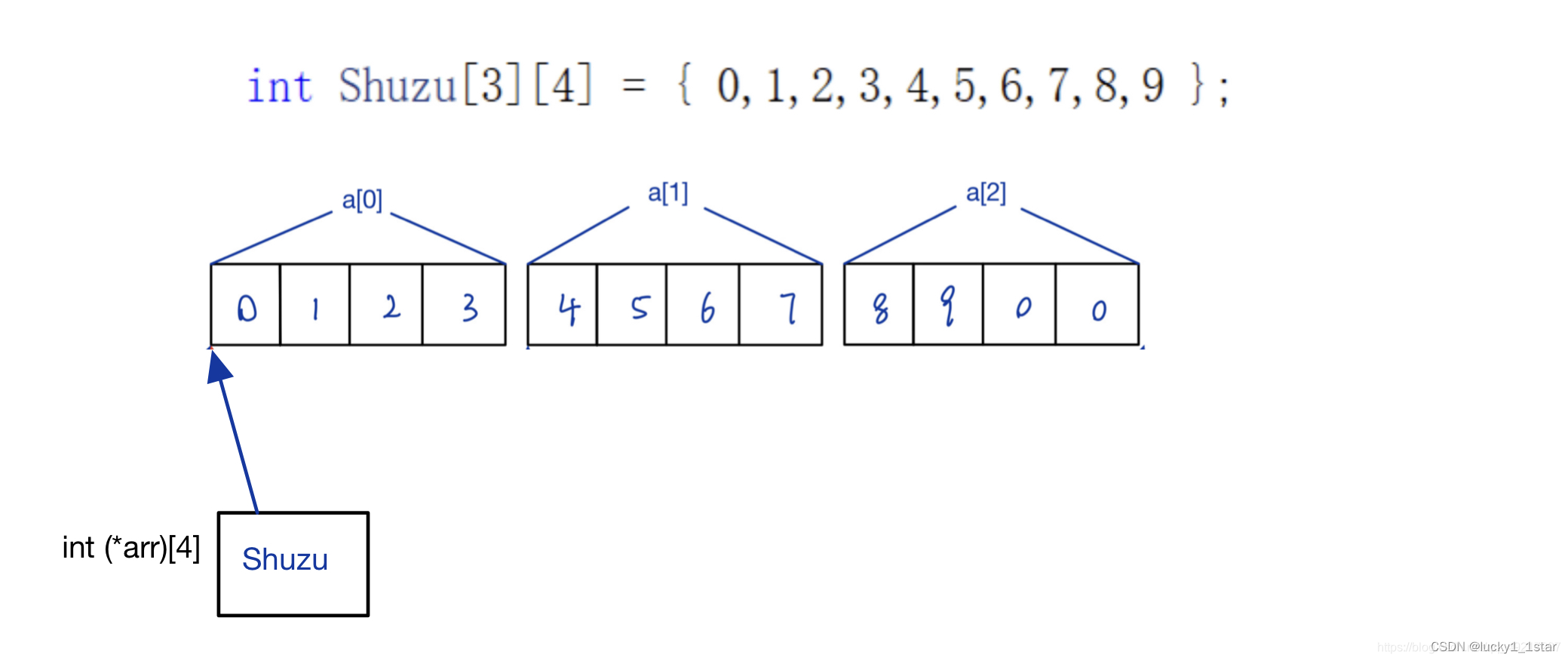
1一维数组 1.1一维数组的创建和初始化 1.1.1数组的创建 //代码1 int arr1[10]; char arr2[10]; float arr3[1]; double arr4[20]; //代码2 //用宏定义的方式 #define X 3 int arr5[X]; //代码3 //错误使用 int count 10; int arr6[count];//数组时候可以正常创建࿱…...
springboot283图书商城管理系统
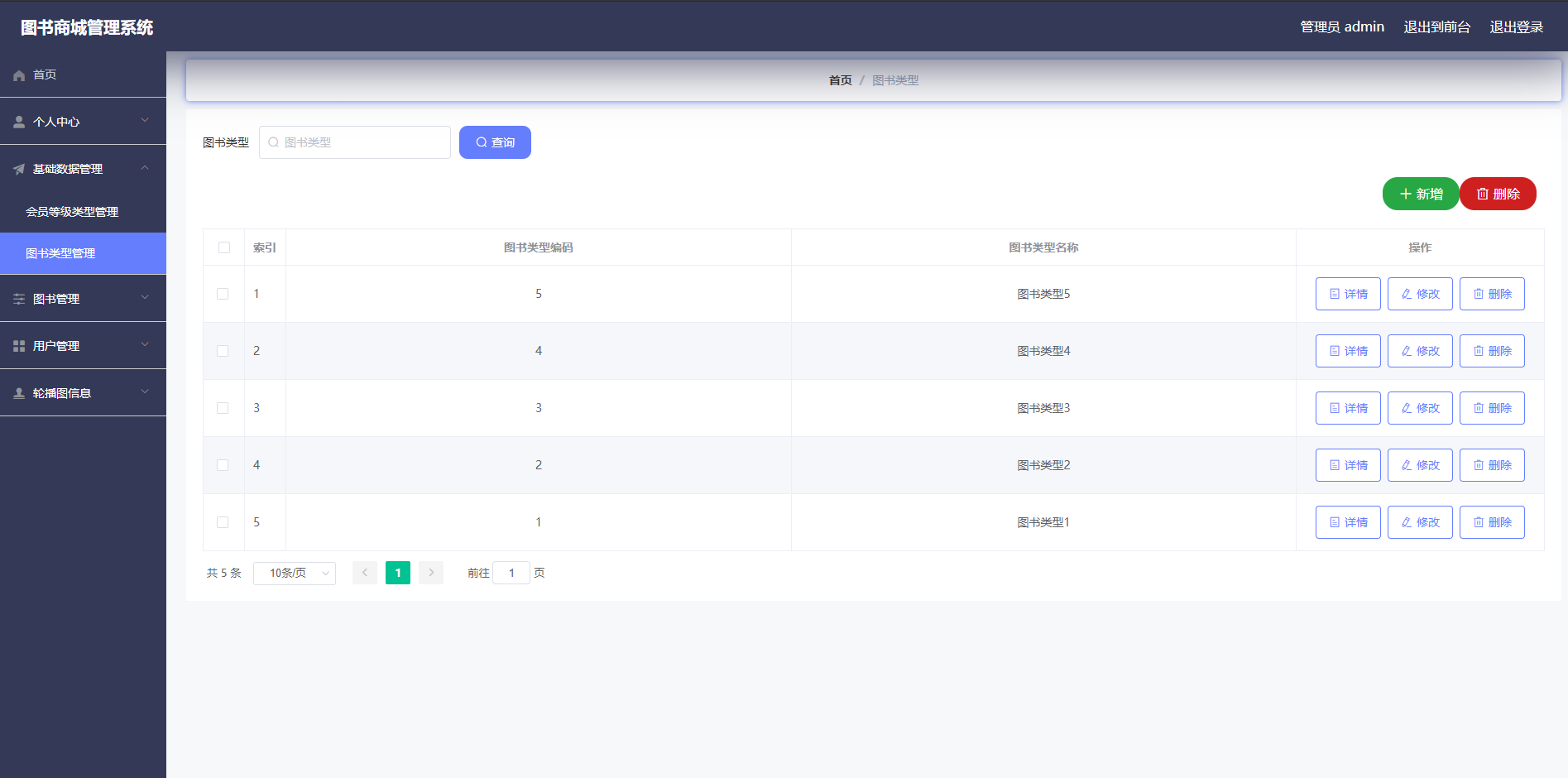
图书商城管理系统 摘 要 现代经济快节奏发展以及不断完善升级的信息化技术,让传统数据信息的管理升级为软件存储,归纳,集中处理数据信息的管理方式。本图书商城管理系统就是在这样的大环境下诞生,其可以帮助管理者在短时间内处理…...

FFmpeg-- c++实现:音频流aac和视频流h264封装
文章目录 流程api核心代码muxer.hmuxer.cpp aac 和 h264 封装为视频流,封装为c的Muxter类 流程 分配视频文件上下文 int Init(const char *url); 创建流,赋值给视频的音频流和视频流 int AddStream(AVCodecContext *codec_ctx); 写视频流的head int Se…...

单片机烧录方式,JTAG,ISP,SWD,
常见的词汇 参考 ISP:In System Programing,在系统编程 IAP:In Application Programing,在应用编程 ICP:In Circuit Programing,在电路编程 ICSP全称是In Circuit Serial Programming JTAG(Joint Test Act…...
【项目管理后台】Vue3+Ts+Sass实战框架搭建一
项目管理后台 建立项目最好是卸载Vetur 新建.env.d.ts文件安装Eslint安装校验忽略文件添加运行脚本 安装prettier新建.prettierrc.json添加规则新建.prettierignore忽略文件 安装配置stylelint新建.stylelintrc.cjs 添加后的运行脚本配置husky配置commitlint配置husky 强制使用…...
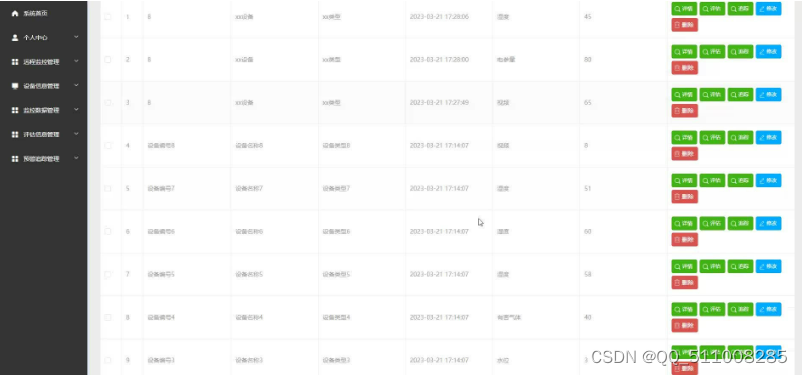
基于python 变配电室运行状态评估与预警系统flask-django-nodejs-php
变配电室电气设备运行状态和环境信息缺乏必要的监测评估预警手段,如有一日遭遇突发情况,将危及电气设备安全稳定运行,易造成设备损坏和电力供应中断[2]。 目前,我国变配电室常采用无人管理的室内站设计方案,长期以来变配电室运维工…...

【自记录】VS2022编译OpenSSL1.0.2u
因为突然要编译一个老工程,老工程里面用到了OpenSSL 1.0.x。 于是官网下载了最后一个1.0.x版本1.0.2u。 1 下载安装Perl 去Perl官网下载即可。 使用vcpkg直接安装也可以,比前者更方便 vcpkg install perl #根据实际路径调整 set PATHD:\vcpkg\downloa…...

ES代替品:轻量级搜索引擎MeiliSearch
痛点 虽然Elasticsearch足够灵活强大、扩展性和实时性也较好。但是对于中小型项目来说,Elasticsearch还是显得有些庞大,对硬件设备的要求也较高。那么,在要求不是很高的情况下,我们可以考虑另一种搜索引擎方案:MeiliSe…...
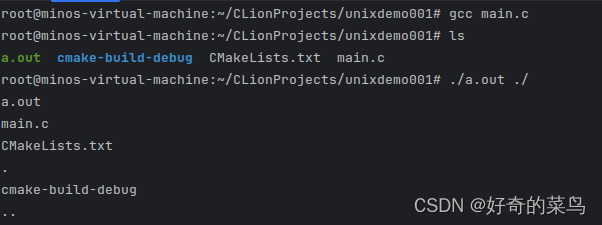
用C语言打造自己的Unix风格ls命令
在Unix或类Unix操作系统中,ls是一个非常基础且实用的命令,它用于列出当前目录或指定目录下的文件和子目录。下面,我们将通过C语言编写一个简化的ls命令,展示如何利用dirent.h头文件提供的函数接口实现这一功能。 #include "…...
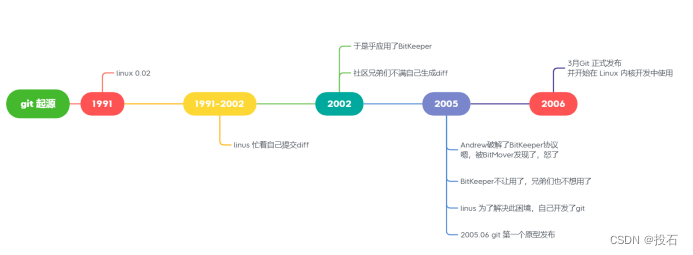
git的起源
开篇一张图: 开源项目linux kernel开发,参与开发与维护者众多。1991至2005年期间绝大多数的 Linux 内核维护工作都花在了提交补丁和保存归档的繁琐事务上。 在2002 年,整个项目组开始启用一个专有的分布式版本控制系统 BitKeeper 来管理和维…...
软件杯 深度学习 python opencv 火焰检测识别
文章目录 0 前言1 基于YOLO的火焰检测与识别2 课题背景3 卷积神经网络3.1 卷积层3.2 池化层3.3 激活函数:3.4 全连接层3.5 使用tensorflow中keras模块实现卷积神经网络 4 YOLOV54.1 网络架构图4.2 输入端4.3 基准网络4.4 Neck网络4.5 Head输出层 5 数据集准备5.1 数…...

C# double类型计算精度问题解决
问题:res 的值0.112450000001,精度不对,预期是0.11245 double force112.45; double res force / Math.Pow(10, index * 3); double force112.45; double res force / Math.Pow(10, index * 3); string str res.ToString(&qu…...
基于Springcloud+Vue校园招聘系统 Eureka分布式微服务
以行动研究为主,辅以文献法、教育实验法和个案研究法等方法相结合的研究方法。在研究方法,遵循软件工程中软件生命周期的规则。概括来讲可以划分成三大步:系统规划、系统开发和系统运行维护。将其上述步骤细分下来,可以分为以下8小…...
【NLP笔记】RNN总结
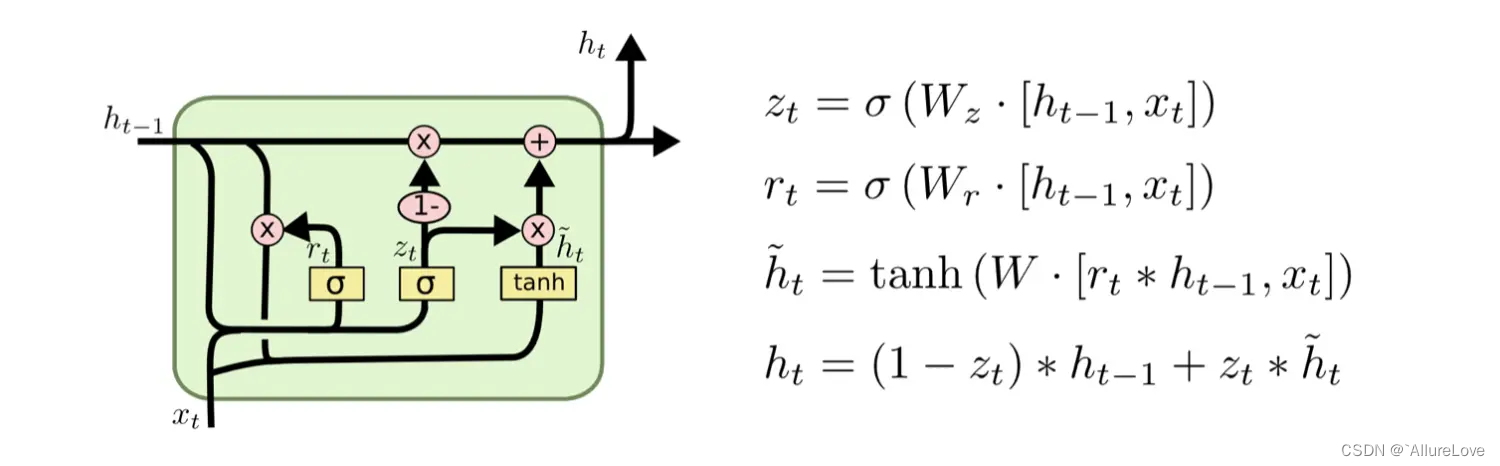
文章目录 经典RNN单向RNN双向RNNDeep RNNRNN特性总结 变体RNNLSTMGRU 参考及转载内容: 循环神经网络(RNN)深度学习05-RNN循环神经网络完全理解RNN(循环神经网络) 传统的CNN(Covolutional Neural Network&am…...

[c++]内存管理
1. C/C内存分布 我们先来看下面的一段代码和相关问题 int globalVar 1; static int staticGlobalVar 1; void Test() { static int staticVar 1; int localVar 1; int num1[10] { 1, 2, 3, 4 }; char char2[] "abcd"; const char* pChar3 "abcd"; …...

k8s通过编排文件,实现服务的滚动更新
k8s通过编排文件,实现服务的滚动更新 apiVersion: apps/v1 kind: pod metadata:name: ‘servicename’labels:app: ‘servicename’ spec:replicas: 4 ##pod启动数量最少为2,不然滚动更新无意义strategy:type: RollingUpdate ##设置类型为滚动更新以及…...

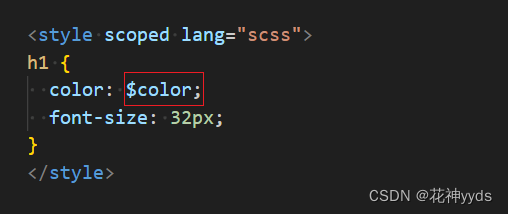
黑丝空姐-造相Z-Turbo构建AI编程助手:自动生成前端组件配图
黑丝空姐-造相Z-Turbo构建AI编程助手:自动生成前端组件配图 想象一下这个场景:你正在为一个航空公司的内部管理系统编写前端代码,需要创建一个“机组人员资料卡”组件。你已经写好了HTML结构和CSS样式,但卡在了头像占位符上——是…...
)
RK3506 AMP 异构多核通信 RPMsg-Lite 握手卡死 (wait_for_link_up)
RK3506 AMP 异构多核通信 RPMsg-Lite 握手卡死 (wait_for_link_up) 1. 问题背景与现象 硬件平台:Rockchip RK3506 (Cortex-A7 集群 Cortex-M0 协处理器) 软件环境:Linux 6.1 (主核) 裸机/RTOS (从核 MCU),使用 RPMsg-Lite 框架进行核间通信…...

Fish-Speech-1.5语音合成参数详解:从基础到高级
Fish-Speech-1.5语音合成参数详解:从基础到高级 语音合成技术已经发展到了一个令人惊叹的水平,而Fish-Speech-1.5作为当前领先的文本转语音模型,提供了丰富的参数调节选项,让用户能够精准控制合成语音的风格和效果。无论你是刚接…...

MAI-UI-8B应用案例:医疗登记表智能填充实战
MAI-UI-8B应用案例:医疗登记表智能填充实战 1. 医疗表单处理的痛点与解决方案 在医疗信息化系统中,患者登记表是每个医疗机构每天都要处理的基础文档。传统方式下,医护人员需要手动填写大量重复信息,不仅效率低下,还…...

OpenClaw极简安装:Docker版Qwen3-32B镜像五分钟部署
OpenClaw极简安装:Docker版Qwen3-32B镜像五分钟部署 1. 为什么选择Docker部署OpenClaw 上周我在本地尝试手动部署OpenClaw时,被各种依赖冲突折磨得够呛。从Node.js版本不兼容到CUDA驱动问题,整整浪费了两天时间。直到发现星图平台的Qwen3-3…...

ddsad
sdsfdjsufhfsuh...

OpenClaw学习助手:Qwen3-4B自动整理技术文档实战
OpenClaw学习助手:Qwen3-4B自动整理技术文档实战 1. 为什么需要AI文档整理助手 作为一个经常需要阅读大量技术文档的开发者,我发现自己长期陷入"收集-遗忘-重复阅读"的恶性循环。PDF里的关键知识点总是淹没在几十页的细节中,手动…...

学术PDF处理神器:OpenClaw+千问3.5-35B-A3B-FP8实现论文公式截图转LaTeX
学术PDF处理神器:OpenClaw千问3.5-35B-A3B-FP8实现论文公式截图转LaTeX 1. 为什么需要自动化论文公式处理 作为经常与学术论文打交道的科研人员,我深刻理解手动输入LaTeX公式的痛苦。去年撰写博士论文期间,我曾花费整整两周时间仅用于转录参…...

3D点云检测实战-Nuscenes数据集解析与Python工具链深度指南
1. Nuscenes数据集全景解析 第一次接触Nuscenes数据集时,我也被它复杂的结构搞得晕头转向。相比KITTI那种"一个txt文件对应一帧数据"的简单结构,Nuscenes采用了基于token的网状索引体系。这种设计虽然初期学习成本较高,但熟悉后会发…...

CentOS7下CDP7.1.1集群部署全攻略:从系统调优到MySQL配置避坑指南
CentOS7企业级CDP7.1.1集群深度部署指南:系统调优与MySQL高可用实战 开篇:企业级大数据平台的基石构建 当数据量突破TB级门槛时,一个经过深度优化的集群环境直接决定了数据分析的效率和稳定性。我曾亲历过某金融客户由于透明大页未关闭导致集…...