计算机设计大赛 题目: 基于深度学习的疲劳驾驶检测 深度学习
文章目录
- 0 前言
- 1 课题背景
- 2 实现目标
- 3 当前市面上疲劳驾驶检测的方法
- 4 相关数据集
- 5 基于头部姿态的驾驶疲劳检测
- 5.1 如何确定疲劳状态
- 5.2 算法步骤
- 5.3 打瞌睡判断
- 6 基于CNN与SVM的疲劳检测方法
- 6.1 网络结构
- 6.2 疲劳图像分类训练
- 6.3 训练结果
- 7 最后
0 前言
🔥 优质竞赛项目系列,今天要分享的是
基于深度学习的驾驶疲劳检测
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
1 课题背景
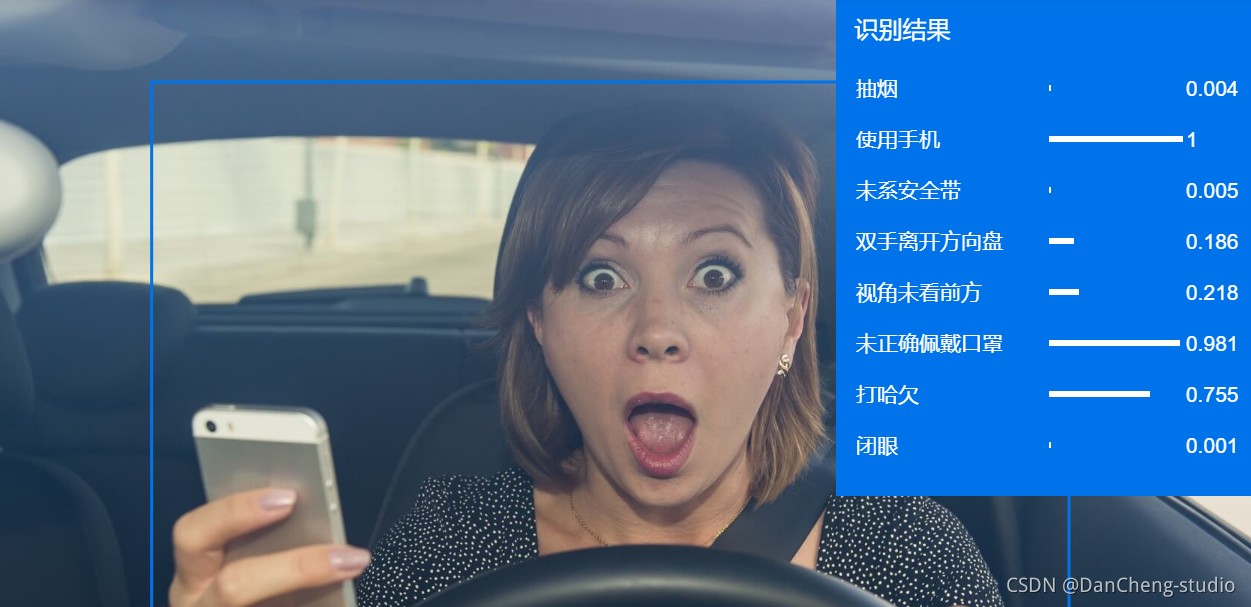
关于对疲劳驾驶的研究不在少数, 不少学者从人物面部入手展开。 人类的面部包含着许多不同的特征信息, 例如其中一些比较明显的特征如打哈欠、 闭眼、
揉眼等表情特征可用来作为判断驾驶员是否处于疲劳状态的依据。 随着计算机技术的不断发展, 尤其是在人工智能相关技术勃发的今天,
借助计算机可以快速有效的识别出图片中人脸特征, 对处于当前时刻驾驶员的精神状态做出判断, 并将疲劳预警信息传达给司机, 以保证交通的安全运行,
减少伤亡事故的发生。
2 实现目标
经查阅相关文献,疲劳在人体面部表情中表现出大致三个类型:打哈欠(嘴巴张大且相对较长时间保持这一状态)、眨眼(或眼睛微闭,此时眨眼次数增多,且眨眼速度变慢)、点头(瞌睡点头)。本实验从人脸朝向、位置、瞳孔朝向、眼睛开合度、眨眼频率、瞳孔收缩率等数据入手,并通过这些数据,实时地计算出驾驶员的注意力集中程度,分析驾驶员是否疲劳驾驶和及时作出安全提示。
3 当前市面上疲劳驾驶检测的方法
学长通过对疲劳驾驶在不同方法下研究进展的分析, 可以更清晰的认识的到当下对该问题较为有效的判定方法。 根据研究对象的不同对检测方法进行分类,
具体分类方法如图
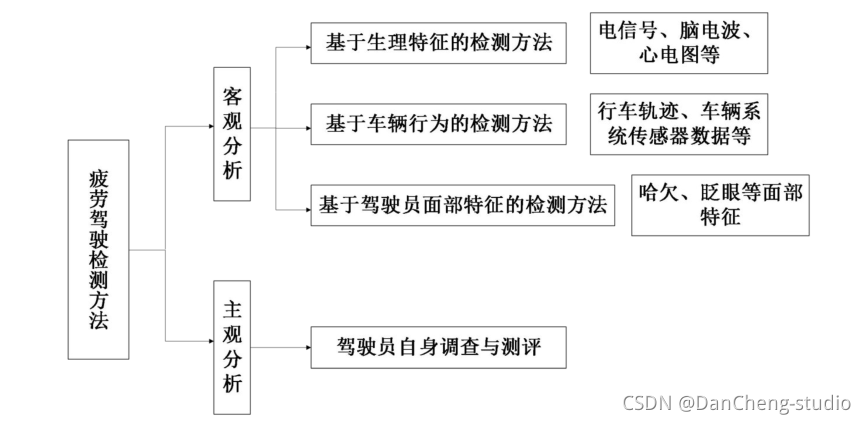
基于驾驶员面部特征的检测方法是根据人在疲劳时面部变化来分析此时的精神状态。 人在瞌睡、 疲劳时面部表情与清醒时有着明显的区别。
通过装置在车辆中的摄像头对驾驶员人脸图片的采集, 利用计算机图像处理和模式识别, 可以有效检测驾驶员的疲
劳特征信息, 比较直观的特征有: 打哈欠, 眨眼, 低头等。
4 相关数据集
学长收集的疲劳检测数据集
驾驶疲劳人脸数据库图片来源分为 3 部分, 每部分均包含疲劳、 轻度疲劳和非疲劳

5 基于头部姿态的驾驶疲劳检测
5.1 如何确定疲劳状态
-
思路一:可利用姿态估计结果(如Pitch的读数)来判断是否点头及点头幅度
-
思路二:或用鼻尖处30号点的前后移动值(或是方差,方差表示一个单位时间数据的偏离程度,程度越大,则表示发生点头动作的概率越大、点头幅度越大)
5.2 算法步骤
-
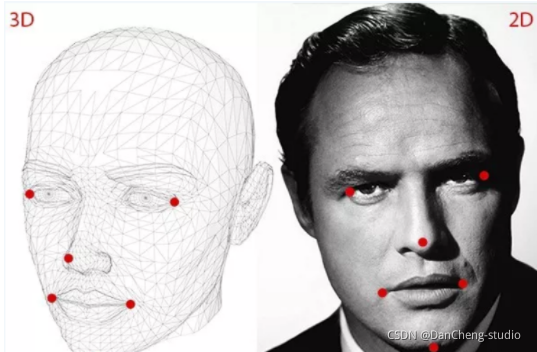
第一步:2D人脸关键点检测;
-
第二步:3D人脸模型匹配;
-
第三步:求解3D点和对应2D点的转换关系;
-
第四步:根据旋转矩阵求解欧拉角。
import cv2 import dlib import numpy as np from imutils import face_utils """ 思路:第一步:2D人脸关键点检测;第二步:3D人脸模型匹配;第三步:求解3D点和对应2D点的转换关系;第四步:根据旋转矩阵求解欧拉角。 """# 加载人脸检测和姿势估计模型(dlib)face_landmark_path = 'D:/myworkspace/JupyterNotebook/fatigue_detecting/model/shape_predictor_68_face_landmarks.dat'""" 只要知道世界坐标系内点的位置、像素坐标位置和相机参数就可以搞定旋转和平移矩阵(OpenCV自带函数solvePnp()) """# 世界坐标系(UVW):填写3D参考点,该模型参考http://aifi.isr.uc.pt/Downloads/OpenGL/glAnthropometric3DModel.cppobject_pts = np.float32([[6.825897, 6.760612, 4.402142], #33左眉左上角[1.330353, 7.122144, 6.903745], #29左眉右角[-1.330353, 7.122144, 6.903745], #34右眉左角[-6.825897, 6.760612, 4.402142], #38右眉右上角[5.311432, 5.485328, 3.987654], #13左眼左上角[1.789930, 5.393625, 4.413414], #17左眼右上角[-1.789930, 5.393625, 4.413414], #25右眼左上角[-5.311432, 5.485328, 3.987654], #21右眼右上角[2.005628, 1.409845, 6.165652], #55鼻子左上角[-2.005628, 1.409845, 6.165652], #49鼻子右上角[2.774015, -2.080775, 5.048531], #43嘴左上角[-2.774015, -2.080775, 5.048531],#39嘴右上角[0.000000, -3.116408, 6.097667], #45嘴中央下角[0.000000, -7.415691, 4.070434]])#6下巴角# 相机坐标系(XYZ):添加相机内参K = [6.5308391993466671e+002, 0.0, 3.1950000000000000e+002,0.0, 6.5308391993466671e+002, 2.3950000000000000e+002,0.0, 0.0, 1.0]# 等价于矩阵[fx, 0, cx; 0, fy, cy; 0, 0, 1]# 图像中心坐标系(uv):相机畸变参数[k1, k2, p1, p2, k3]D = [7.0834633684407095e-002, 6.9140193737175351e-002, 0.0, 0.0, -1.3073460323689292e+000]# 像素坐标系(xy):填写凸轮的本征和畸变系数cam_matrix = np.array(K).reshape(3, 3).astype(np.float32) dist_coeffs = np.array(D).reshape(5, 1).astype(np.float32)# 重新投影3D点的世界坐标轴以验证结果姿势reprojectsrc = np.float32([[10.0, 10.0, 10.0],[10.0, 10.0, -10.0],[10.0, -10.0, -10.0],[10.0, -10.0, 10.0],[-10.0, 10.0, 10.0],[-10.0, 10.0, -10.0],[-10.0, -10.0, -10.0],[-10.0, -10.0, 10.0]])# 绘制正方体12轴line_pairs = [[0, 1], [1, 2], [2, 3], [3, 0],[4, 5], [5, 6], [6, 7], [7, 4],[0, 4], [1, 5], [2, 6], [3, 7]]def get_head_pose(shape):# 填写2D参考点,注释遵循https://ibug.doc.ic.ac.uk/resources/300-W/"""17左眉左上角/21左眉右角/22右眉左上角/26右眉右上角/36左眼左上角/39左眼右上角/42右眼左上角/45右眼右上角/31鼻子左上角/35鼻子右上角/48左上角/54嘴右上角/57嘴中央下角/8下巴角"""# 像素坐标集合image_pts = np.float32([shape[17], shape[21], shape[22], shape[26], shape[36],shape[39], shape[42], shape[45], shape[31], shape[35],shape[48], shape[54], shape[57], shape[8]])"""用solvepnp或sovlepnpRansac,输入3d点、2d点、相机内参、相机畸变,输出r、t之后用projectPoints,输入3d点、相机内参、相机畸变、r、t,输出重投影2d点计算原2d点和重投影2d点的距离作为重投影误差"""# solvePnP计算姿势——求解旋转和平移矩阵:# rotation_vec表示旋转矩阵,translation_vec表示平移矩阵,cam_matrix与K矩阵对应,dist_coeffs与D矩阵对应。_, rotation_vec, translation_vec = cv2.solvePnP(object_pts, image_pts, cam_matrix, dist_coeffs)# projectPoints重新投影误差reprojectdst, _ = cv2.projectPoints(reprojectsrc, rotation_vec, translation_vec, cam_matrix,dist_coeffs)reprojectdst = tuple(map(tuple, reprojectdst.reshape(8, 2)))# 以8行2列显示# 计算欧拉角calc euler angle# 参考https://docs.opencv.org/2.4/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html#decomposeprojectionmatrixrotation_mat, _ = cv2.Rodrigues(rotation_vec)#罗德里格斯公式(将旋转矩阵转换为旋转向量)pose_mat = cv2.hconcat((rotation_mat, translation_vec))# 水平拼接,vconcat垂直拼接# eulerAngles –可选的三元素矢量,包含三个以度为单位的欧拉旋转角度_, _, _, _, _, _, euler_angle = cv2.decomposeProjectionMatrix(pose_mat)# 将投影矩阵分解为旋转矩阵和相机矩阵return reprojectdst, euler_angledef main():# returncap = cv2.VideoCapture(0)if not cap.isOpened():print("Unable to connect to camera.")return# 检测人脸detector = dlib.get_frontal_face_detector()# 检测第一个人脸的关键点predictor = dlib.shape_predictor(face_landmark_path)while cap.isOpened():ret, frame = cap.read()if ret:face_rects = detector(frame, 0)if len(face_rects) > 0:# 循环脸部位置信息,使用predictor(gray, rect)获得脸部特征位置的信息shape = predictor(frame, face_rects[0])# 将脸部特征信息转换为数组array的格式shape = face_utils.shape_to_np(shape)# 获取头部姿态reprojectdst, euler_angle = get_head_pose(shape)pitch = format(euler_angle[0, 0])yaw = format(euler_angle[1, 0])roll = format(euler_angle[2, 0])print('pitch:{}, yaw:{}, roll:{}'.format(pitch, yaw, roll))# 标出68个特征点for (x, y) in shape:cv2.circle(frame, (x, y), 1, (0, 0, 255), -1)# 绘制正方体12轴for start, end in line_pairs:cv2.line(frame, reprojectdst[start], reprojectdst[end], (0, 0, 255))# 显示角度结果cv2.putText(frame, "X: " + "{:7.2f}".format(euler_angle[0, 0]), (20, 20), cv2.FONT_HERSHEY_SIMPLEX,0.75, (0, 0, 255), thickness=2)cv2.putText(frame, "Y: " + "{:7.2f}".format(euler_angle[1, 0]), (20, 50), cv2.FONT_HERSHEY_SIMPLEX,0.75, (0, 0, 255), thickness=2)cv2.putText(frame, "Z: " + "{:7.2f}".format(euler_angle[2, 0]), (20, 80), cv2.FONT_HERSHEY_SIMPLEX,0.75, (0, 0, 255), thickness=2) # 按q退出提示cv2.putText(frame, "Press 'q': Quit", (20, 450),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (84, 255, 159), 2)# 窗口显示 show with opencvcv2.imshow("Head_Posture", frame)if cv2.waitKey(1) & 0xFF == ord('q'):break# 释放摄像头 release cameracap.release()# do a bit of cleanupcv2.destroyAllWindows()if __name__ == '__main__':main()
5.3 打瞌睡判断
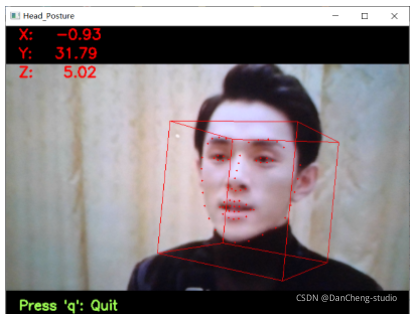
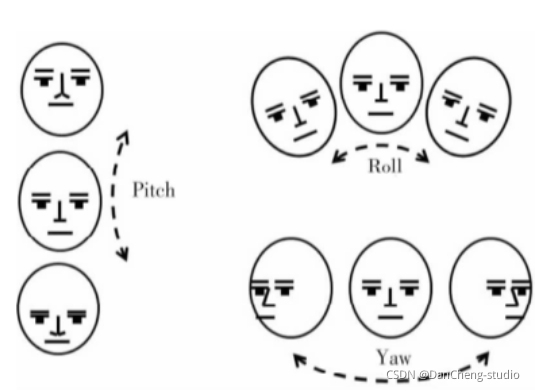
头部姿态判断打瞌睡得到实时头部姿态的旋转角度过后,为头部旋转角度的3个参数Yaw,Pitch和Roll的示意图,驾驶员在打瞌睡时,显然头部会做类似于点头和倾斜的动作.而根据一般人的打瞌睡时表现出来的头部姿态,显然很少会在Yaw上有动作,而主要集中在Pitch和Roll的行为.设定参数阈值为0.3,在一个时间段内10
s内,当I PitchI≥20°或者|Rolll≥20°的时间比例超过0.3时,就认为驾驶员处于打瞌睡的状态,发出预警。
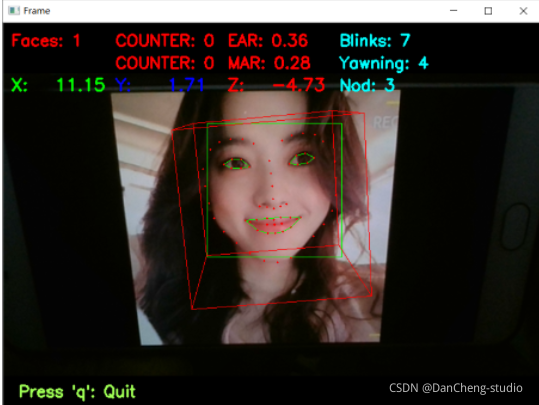
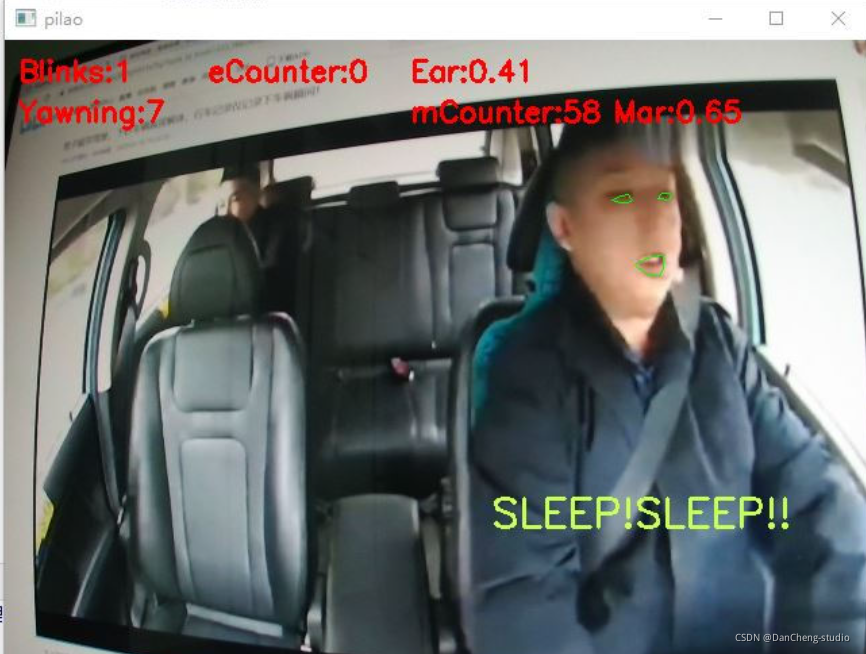
from scipy.spatial import distance as distfrom imutils.video import FileVideoStreamfrom imutils.video import VideoStreamfrom imutils import face_utilsimport numpy as np # 数据处理的库 numpyimport argparseimport imutilsimport timeimport dlibimport cv2import mathimport timefrom threading import Thread,# 世界坐标系(UVW):填写3D参考点,该模型参考http://aifi.isr.uc.pt/Downloads/OpenGL/glAnthropometric3DModel.cppobject_pts = np.float32([[6.825897, 6.760612, 4.402142], #33左眉左上角[1.330353, 7.122144, 6.903745], #29左眉右角[-1.330353, 7.122144, 6.903745], #34右眉左角[-6.825897, 6.760612, 4.402142], #38右眉右上角[5.311432, 5.485328, 3.987654], #13左眼左上角[1.789930, 5.393625, 4.413414], #17左眼右上角[-1.789930, 5.393625, 4.413414], #25右眼左上角[-5.311432, 5.485328, 3.987654], #21右眼右上角[2.005628, 1.409845, 6.165652], #55鼻子左上角[-2.005628, 1.409845, 6.165652], #49鼻子右上角[2.774015, -2.080775, 5.048531], #43嘴左上角[-2.774015, -2.080775, 5.048531],#39嘴右上角[0.000000, -3.116408, 6.097667], #45嘴中央下角[0.000000, -7.415691, 4.070434]])#6下巴角# 相机坐标系(XYZ):添加相机内参K = [6.5308391993466671e+002, 0.0, 3.1950000000000000e+002,0.0, 6.5308391993466671e+002, 2.3950000000000000e+002,0.0, 0.0, 1.0]# 等价于矩阵[fx, 0, cx; 0, fy, cy; 0, 0, 1]# 图像中心坐标系(uv):相机畸变参数[k1, k2, p1, p2, k3]D = [7.0834633684407095e-002, 6.9140193737175351e-002, 0.0, 0.0, -1.3073460323689292e+000]# 像素坐标系(xy):填写凸轮的本征和畸变系数cam_matrix = np.array(K).reshape(3, 3).astype(np.float32)dist_coeffs = np.array(D).reshape(5, 1).astype(np.float32)# 重新投影3D点的世界坐标轴以验证结果姿势reprojectsrc = np.float32([[10.0, 10.0, 10.0],[10.0, 10.0, -10.0],[10.0, -10.0, -10.0],[10.0, -10.0, 10.0],[-10.0, 10.0, 10.0],[-10.0, 10.0, -10.0],[-10.0, -10.0, -10.0],[-10.0, -10.0, 10.0]])# 绘制正方体12轴line_pairs = [[0, 1], [1, 2], [2, 3], [3, 0],[4, 5], [5, 6], [6, 7], [7, 4],[0, 4], [1, 5], [2, 6], [3, 7]]def get_head_pose(shape):# 头部姿态估计# (像素坐标集合)填写2D参考点,注释遵循https://ibug.doc.ic.ac.uk/resources/300-W/# 17左眉左上角/21左眉右角/22右眉左上角/26右眉右上角/36左眼左上角/39左眼右上角/42右眼左上角/# 45右眼右上角/31鼻子左上角/35鼻子右上角/48左上角/54嘴右上角/57嘴中央下角/8下巴角image_pts = np.float32([shape[17], shape[21], shape[22], shape[26], shape[36],shape[39], shape[42], shape[45], shape[31], shape[35],shape[48], shape[54], shape[57], shape[8]])# solvePnP计算姿势——求解旋转和平移矩阵:# rotation_vec表示旋转矩阵,translation_vec表示平移矩阵,cam_matrix与K矩阵对应,dist_coeffs与D矩阵对应。_, rotation_vec, translation_vec = cv2.solvePnP(object_pts, image_pts, cam_matrix, dist_coeffs)# projectPoints重新投影误差:原2d点和重投影2d点的距离(输入3d点、相机内参、相机畸变、r、t,输出重投影2d点)reprojectdst, _ = cv2.projectPoints(reprojectsrc, rotation_vec, translation_vec, cam_matrix,dist_coeffs)reprojectdst = tuple(map(tuple, reprojectdst.reshape(8, 2)))# 以8行2列显示# 计算欧拉角calc euler angle# 参考https://docs.opencv.org/2.4/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html#decomposeprojectionmatrixrotation_mat, _ = cv2.Rodrigues(rotation_vec)#罗德里格斯公式(将旋转矩阵转换为旋转向量)pose_mat = cv2.hconcat((rotation_mat, translation_vec))# 水平拼接,vconcat垂直拼接# decomposeProjectionMatrix将投影矩阵分解为旋转矩阵和相机矩阵_, _, _, _, _, _, euler_angle = cv2.decomposeProjectionMatrix(pose_mat)pitch, yaw, roll = [math.radians(_) for _ in euler_angle]pitch = math.degrees(math.asin(math.sin(pitch)))roll = -math.degrees(math.asin(math.sin(roll)))yaw = math.degrees(math.asin(math.sin(yaw)))print('pitch:{}, yaw:{}, roll:{}'.format(pitch, yaw, roll))return reprojectdst, euler_angle# 投影误差,欧拉角def eye_aspect_ratio(eye):# 垂直眼标志(X,Y)坐标A = dist.euclidean(eye[1], eye[5])# 计算两个集合之间的欧式距离B = dist.euclidean(eye[2], eye[4])# 计算水平之间的欧几里得距离# 水平眼标志(X,Y)坐标C = dist.euclidean(eye[0], eye[3])# 眼睛长宽比的计算ear = (A + B) / (2.0 * C)# 返回眼睛的长宽比return eardef mouth_aspect_ratio(mouth):# 嘴部A = np.linalg.norm(mouth[2] - mouth[9]) # 51, 59B = np.linalg.norm(mouth[4] - mouth[7]) # 53, 57C = np.linalg.norm(mouth[0] - mouth[6]) # 49, 55mar = (A + B) / (2.0 * C)return mar# 定义常数# 眼睛长宽比# 闪烁阈值EYE_AR_THRESH = 0.2EYE_AR_CONSEC_FRAMES = 3# 打哈欠长宽比# 闪烁阈值MAR_THRESH = 0.5MOUTH_AR_CONSEC_FRAMES = 3# 瞌睡点头HAR_THRESH = 0.3NOD_AR_CONSEC_FRAMES = 3# 初始化帧计数器和眨眼总数COUNTER = 0TOTAL = 0# 初始化帧计数器和打哈欠总数mCOUNTER = 0mTOTAL = 0# 初始化帧计数器和点头总数hCOUNTER = 0hTOTAL = 0# 初始化DLIB的人脸检测器(HOG),然后创建面部标志物预测print("[INFO] loading facial landmark predictor...")# 第一步:使用dlib.get_frontal_face_detector() 获得脸部位置检测器detector = dlib.get_frontal_face_detector()# 第二步:使用dlib.shape_predictor获得脸部特征位置检测器predictor = dlib.shape_predictor('D:/myworkspace/JupyterNotebook/fatigue_detecting/model/shape_predictor_68_face_landmarks.dat')# 第三步:分别获取左右眼面部标志的索引(lStart, lEnd) = face_utils.FACIAL_LANDMARKS_IDXS["left_eye"](rStart, rEnd) = face_utils.FACIAL_LANDMARKS_IDXS["right_eye"](mStart, mEnd) = face_utils.FACIAL_LANDMARKS_IDXS["mouth"]# 第四步:打开cv2 本地摄像头cap = cv2.VideoCapture(0)# 从视频流循环帧while True:# 第五步:进行循环,读取图片,并对图片做维度扩大,并进灰度化ret, frame = cap.read()frame = imutils.resize(frame, width=720)gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)# 第六步:使用detector(gray, 0) 进行脸部位置检测rects = detector(gray, 0)# 第七步:循环脸部位置信息,使用predictor(gray, rect)获得脸部特征位置的信息for rect in rects:shape = predictor(gray, rect)# 第八步:将脸部特征信息转换为数组array的格式shape = face_utils.shape_to_np(shape)# 第九步:提取左眼和右眼坐标leftEye = shape[lStart:lEnd]rightEye = shape[rStart:rEnd]# 嘴巴坐标mouth = shape[mStart:mEnd] # 第十步:构造函数计算左右眼的EAR值,使用平均值作为最终的EARleftEAR = eye_aspect_ratio(leftEye)rightEAR = eye_aspect_ratio(rightEye)ear = (leftEAR + rightEAR) / 2.0# 打哈欠mar = mouth_aspect_ratio(mouth)# 第十一步:使用cv2.convexHull获得凸包位置,使用drawContours画出轮廓位置进行画图操作leftEyeHull = cv2.convexHull(leftEye)rightEyeHull = cv2.convexHull(rightEye)cv2.drawContours(frame, [leftEyeHull], -1, (0, 255, 0), 1)cv2.drawContours(frame, [rightEyeHull], -1, (0, 255, 0), 1)mouthHull = cv2.convexHull(mouth)cv2.drawContours(frame, [mouthHull], -1, (0, 255, 0), 1)# 第十二步:进行画图操作,用矩形框标注人脸left = rect.left()top = rect.top()right = rect.right()bottom = rect.bottom()cv2.rectangle(frame, (left, top), (right, bottom), (0, 255, 0), 1) '''分别计算左眼和右眼的评分求平均作为最终的评分,如果小于阈值,则加1,如果连续3次都小于阈值,则表示进行了一次眨眼活动'''# 第十三步:循环,满足条件的,眨眼次数+1if ear < EYE_AR_THRESH:# 眼睛长宽比:0.2COUNTER += 1else:# 如果连续3次都小于阈值,则表示进行了一次眨眼活动if COUNTER >= EYE_AR_CONSEC_FRAMES:# 阈值:3TOTAL += 1# 重置眼帧计数器COUNTER = 0# 第十四步:进行画图操作,同时使用cv2.putText将眨眼次数进行显示cv2.putText(frame, "Faces: {}".format(len(rects)), (10, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2) cv2.putText(frame, "COUNTER: {}".format(COUNTER), (150, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2) cv2.putText(frame, "EAR: {:.2f}".format(ear), (300, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)cv2.putText(frame, "Blinks: {}".format(TOTAL), (450, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255,255,0), 2)'''计算张嘴评分,如果小于阈值,则加1,如果连续3次都小于阈值,则表示打了一次哈欠,同一次哈欠大约在3帧'''# 同理,判断是否打哈欠 if mar > MAR_THRESH:# 张嘴阈值0.5mCOUNTER += 1cv2.putText(frame, "Yawning!", (10, 60),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)else:# 如果连续3次都小于阈值,则表示打了一次哈欠if mCOUNTER >= MOUTH_AR_CONSEC_FRAMES:# 阈值:3mTOTAL += 1# 重置嘴帧计数器mCOUNTER = 0cv2.putText(frame, "COUNTER: {}".format(mCOUNTER), (150, 60),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2) cv2.putText(frame, "MAR: {:.2f}".format(mar), (300, 60),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)cv2.putText(frame, "Yawning: {}".format(mTOTAL), (450, 60),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255,255,0), 2)"""瞌睡点头"""# 第十五步:获取头部姿态reprojectdst, euler_angle = get_head_pose(shape)har = euler_angle[0, 0]# 取pitch旋转角度if har > HAR_THRESH:# 点头阈值0.3hCOUNTER += 1else:# 如果连续3次都小于阈值,则表示瞌睡点头一次if hCOUNTER >= NOD_AR_CONSEC_FRAMES:# 阈值:3hTOTAL += 1# 重置点头帧计数器hCOUNTER = 0# 绘制正方体12轴for start, end in line_pairs:cv2.line(frame, reprojectdst[start], reprojectdst[end], (0, 0, 255))# 显示角度结果cv2.putText(frame, "X: " + "{:7.2f}".format(euler_angle[0, 0]), (10, 90), cv2.FONT_HERSHEY_SIMPLEX,0.75, (0, 255, 0), thickness=2)# GREENcv2.putText(frame, "Y: " + "{:7.2f}".format(euler_angle[1, 0]), (150, 90), cv2.FONT_HERSHEY_SIMPLEX,0.75, (255, 0, 0), thickness=2)# BLUEcv2.putText(frame, "Z: " + "{:7.2f}".format(euler_angle[2, 0]), (300, 90), cv2.FONT_HERSHEY_SIMPLEX,0.75, (0, 0, 255), thickness=2)# RED cv2.putText(frame, "Nod: {}".format(hTOTAL), (450, 90),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255,255,0), 2)# 第十六步:进行画图操作,68个特征点标识for (x, y) in shape:cv2.circle(frame, (x, y), 1, (0, 0, 255), -1)print('嘴巴实时长宽比:{:.2f} '.format(mar)+"\t是否张嘴:"+str([False,True][mar > MAR_THRESH]))print('眼睛实时长宽比:{:.2f} '.format(ear)+"\t是否眨眼:"+str([False,True][COUNTER>=1]))# 确定疲劳提示:眨眼50次,打哈欠15次,瞌睡点头15次if TOTAL >= 50 or mTOTAL>=15 or hTOTAL>=15:cv2.putText(frame, "SLEEP!!!", (100, 200),cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 255), 3)# 按q退出cv2.putText(frame, "Press 'q': Quit", (20, 500),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (84, 255, 159), 2)# 窗口显示 show with opencvcv2.imshow("Frame", frame)# if the `q` key was pressed, break from the loopif cv2.waitKey(1) & 0xFF == ord('q'):break# 释放摄像头 release cameracap.release()# do a bit of cleanupcv2.destroyAllWindows()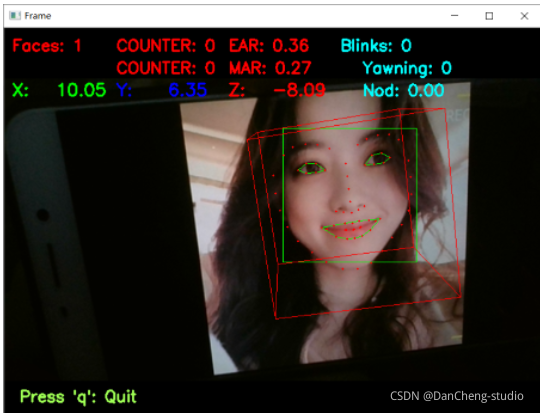
6 基于CNN与SVM的疲劳检测方法
6.1 网络结构
学长将卷积神经网络作为特征提取器, 支持向量机作为分类识别器并通过串联将两者结合 , 构造理想的深度识别模型, 提高对驾驶员疲劳的识别准确率。
本次课题主要以实现提高识别精度为目的, 设计使用的特征提取网络结构中卷积层、 池化层以及全连接层个数均为两层;
在网络的结尾处添加一层支持向量机作为识别分类器;

根据对卷积神经网络的描述, 这里设计使用的网络结构为: 输入层、 二层卷积层、 二层池化层、 二层全连接层以及 SVM
分类器组成的卷积神经网络对采集数据进行实验。
可将网络视为三个部分, 数据输入部分即网络输入层, 为特征提取部分由卷积层和池化层构成, SVM 为分类识别部分; 三部分网络串联出整体识别框架,
且相互间约束不大, 为后续优化工作提供了条件。
6.2 疲劳图像分类训练
网络的训练由于数据量较大进行实验时将数据分为多个批次, 每个批次中含有 20张图像, 经过前向、 反向传播后更新网络参数, 训练出误差合适的网络。 测试时,
图像由网络进行识别, 根据得到的识别正确率来验证网络的可行性。

疲劳驾驶检测需对网络进行训练, 在保证网络训练准确率达到一定精度后即可对图像进行判别; 疲劳驾驶网络训练算法过程如下:
- Step1: 网络初始化: 初始化网络学习率η, 在数值范围[0, 1]中随机初始化网络参数权值及偏置值; 设置网络结构: 卷积核大小为 5×5, 每批次样本数量 20;
- Step2: 随机选择数据库内面部表情图像并依次输入网络, 网络按照送入每一批次的图像进行训练;
- Step3: 网络将训练得到的输出值同图像期望值进行比较, 计算出输出误差;
- Step4: 根据反向传播原理将误差反向传播计算, 并调整网络参数权值和偏置值;
- Step5: 判断迭代次数, 达到期望的迭代步数后转到 Step6, 否则转到 Step3;
- Step6: 将 CNN 提取到的图像特征传入 SVM 中进行训练;
- Step7: 结束。
6.3 训练结果
学长将对建立起的数据集进行实验, 实验中分别在每一批次下对识别正确和错误个数进行统计, 然后同批次中图片数量相比, 得出最终的准确率和损失率(错误率) 。


模型测试结果

7 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
计算机设计大赛 题目: 基于深度学习的疲劳驾驶检测 深度学习
文章目录 0 前言1 课题背景2 实现目标3 当前市面上疲劳驾驶检测的方法4 相关数据集5 基于头部姿态的驾驶疲劳检测5.1 如何确定疲劳状态5.2 算法步骤5.3 打瞌睡判断 6 基于CNN与SVM的疲劳检测方法6.1 网络结构6.2 疲劳图像分类训练6.3 训练结果 7 最后 0 前言 🔥 优…...
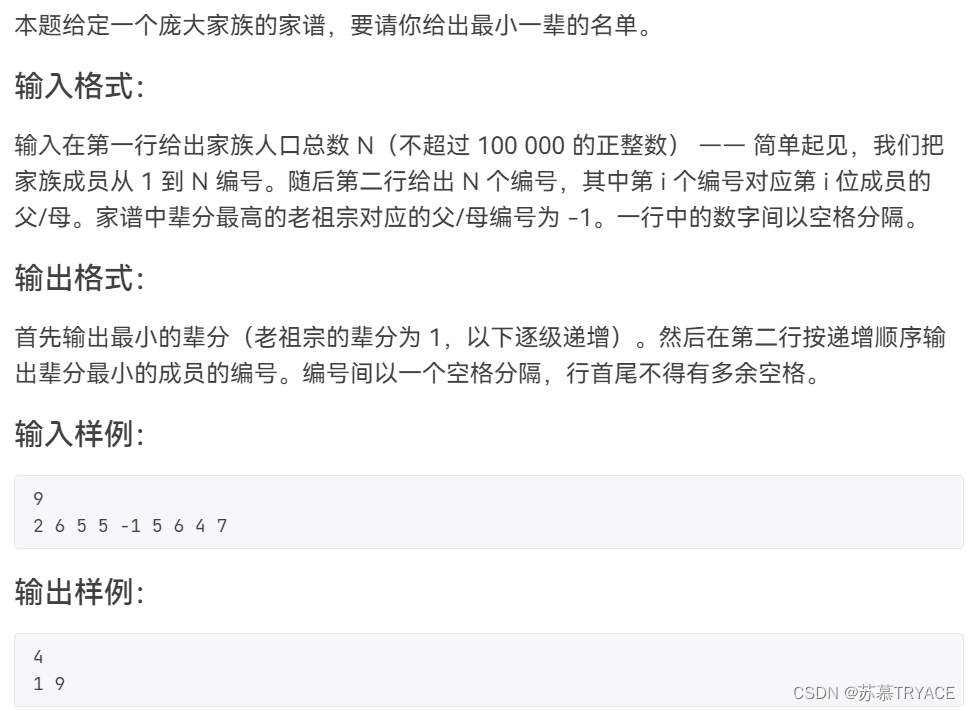
小字辈[天梯赛]
文章目录 题目描述思路AC代码 题目描述 思路 深度优先搜索 具体流程 1.读入每个人的祖先,标记辈分最高的老祖宗对应的下标pos 2.从pos开始dfs,每次判断当前遍历的深度,如果>原来的深度,更新,并将存储最小辈分的数组…...

Linux常用操作命令、端口、防火墙、磁盘与内存
目录 1.Linux常用操作命令 1.1 基本命令 1.2 高级命令 2.Linux防火墙 2.1 iptables 2.2 firewalld 3.Linux端口号 3.1 netstat(查看网络连接) 3.2 lsof(查找占用端口的进程) 3.3 ps(查看进程服务路径&#x…...
<JavaEE> 了解网络层协议 -- IP协议
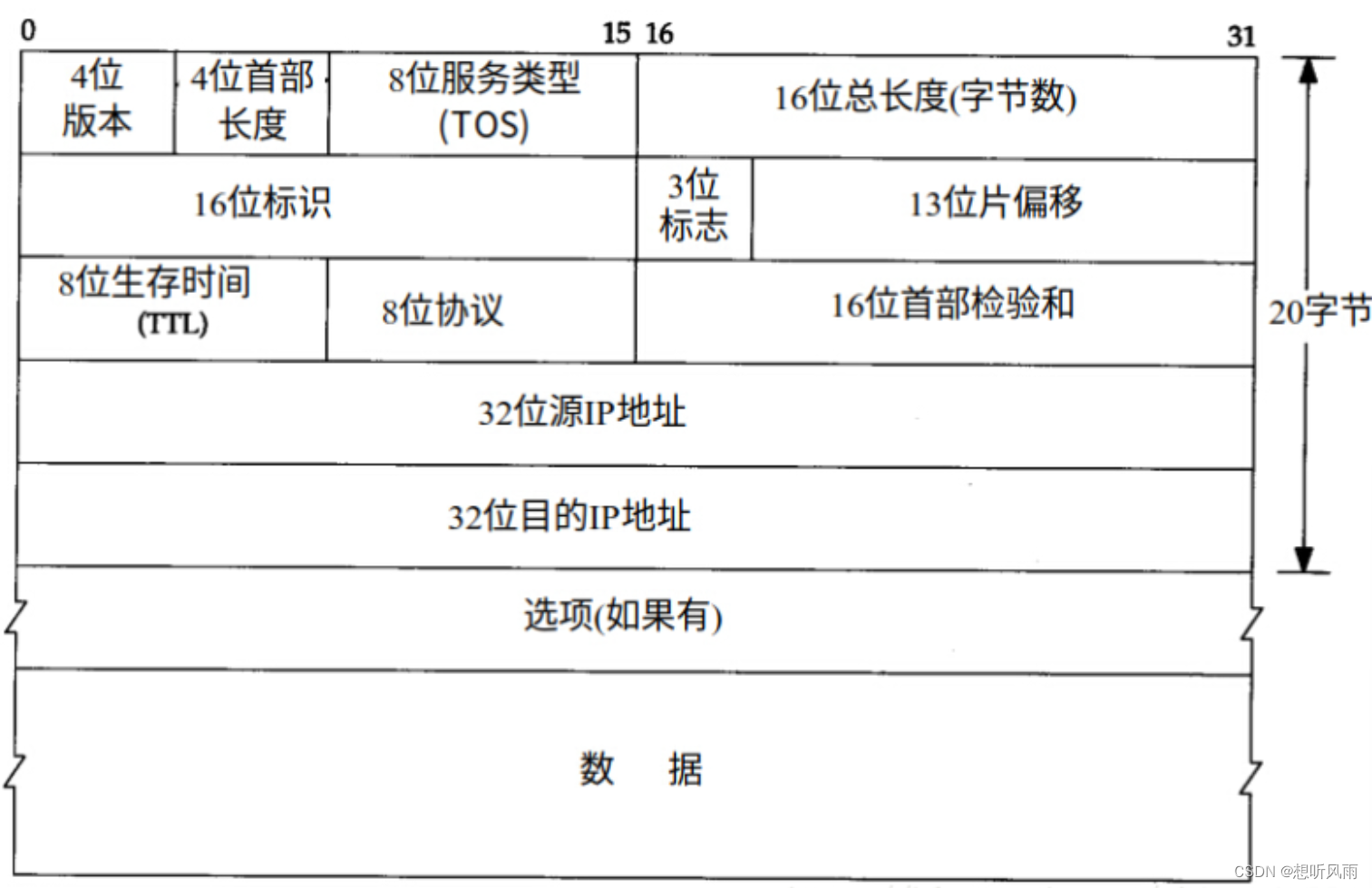
目录 初识IP协议 什么是IP协议? IP协议中的基础概念 IP协议格式 图示 4bit版本号(version) 4bit头部长度(headerlength) 8bit服务类型(TypeOfService) 16bit总长度(total l…...
【安全类书籍-2】Web渗透测试:使用Kali Linux
目录 内容简介 作用 下载地址 内容简介 书籍的主要内容是指导读者如何运用Kali Linux这一专业的渗透测试平台对Web应用程序进行全面的安全测试。作者们从攻击者的视角出发,详细阐述了渗透测试的基本概念和技术,以及如何配置Kali Linux以适应渗透测试需求。书中不仅教授读者…...
ubuntu10.04 apache2.2开启tls1.2的支持,使现代的edge和firefox浏览器能正常访问https
最近发现自己ubuntu10.04服务器上的apache https无法通过win11上的edge和firefox浏览器访问,但xp下的ie6和ie8没有问题。 firefox的错误提示为“此网站可能不支持TLS 1.2协议,而这是Firefox支持的最低版本”。 经过检查发现: IE6访问https所需的版本是SS…...
算法学习(持续更新中)
学习视频:一周刷爆LeetCode,算法大神左神(左程云)耗时100天打造算法与数据结构基础到高级全家桶教程,直击BTAJ等一线大厂必问算法面试题真题详解(马士兵)_哔哩哔哩_bilibili 时间复杂度 一个操…...
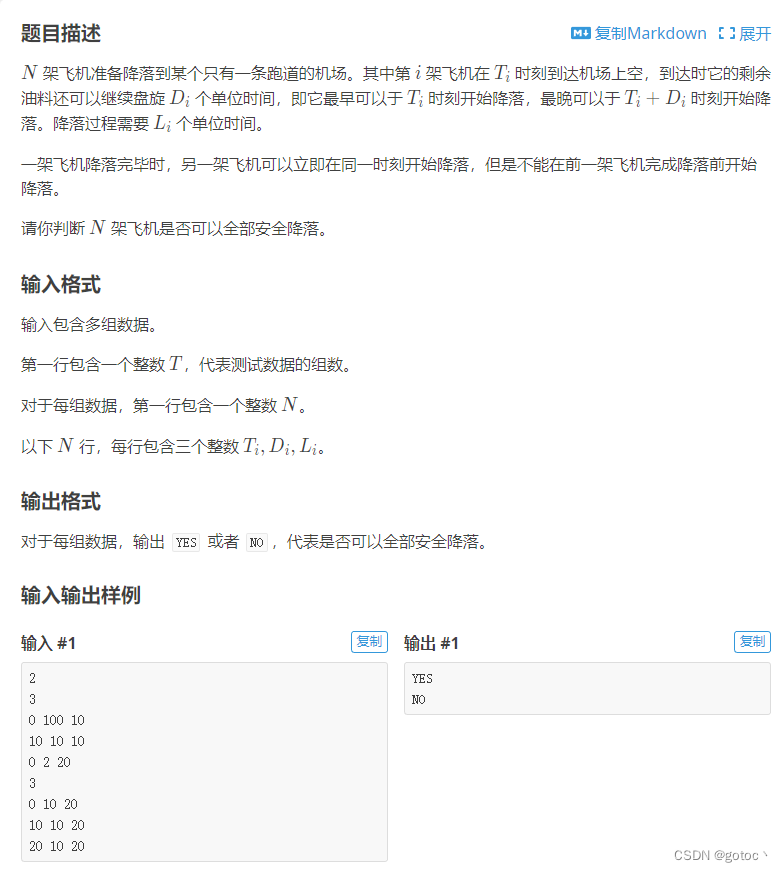
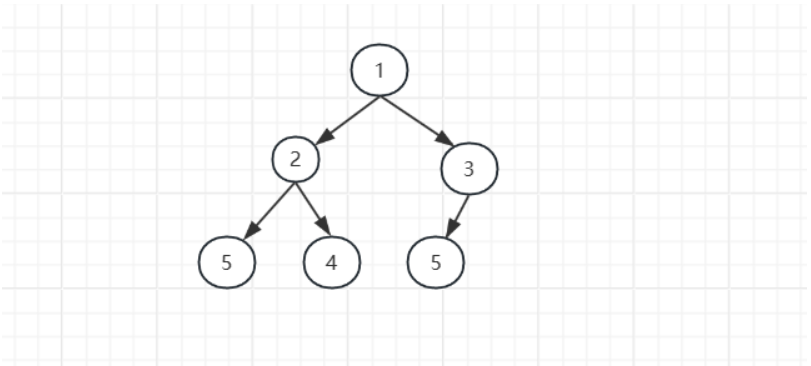
蓝桥杯 2023 省B 飞机降落
首先,这题要求的数据量比较少,我们可以考虑考虑暴力解法。 这题可能难在很多情况的考虑,比如说: 现在时间是10,有个飞机20才到,我们是可以干等10分钟。 #include <iostream> #include <…...
基于python的变配电室运行状态评估与预警系统flask-django-nodejs-php
近年来,随着我国工业化、城镇化步伐的不断加快,城市配电网络取得令人瞩目的发展成果。变配电室是供配电系统的核心,在供配电系统中占有特殊的重要地位[1]。变配电室电气设备运行状态和环境信息缺乏必要的监测评估预警手段,如有一日遭遇突发情…...
,右键单击展示操作菜单,可编辑单元格高亮展示)
el-table左键双击单元格编辑内容(输入框输入计算公式可直接得出结果),右键单击展示操作菜单,可编辑单元格高亮展示
vue2点击左侧的树节点(el-tree)定位到对应右侧树形表格(el-table)的位置,树形表格懒加载 表格代码 <el-table ref"singleTable" :data"detailsList" highlight-current-row"" row-key"detailId"…...

实现HBase表和RDB表的转化(附Java源码资源)
实现HBase表和RDB表的转化 一、引入 转化为HBase表的三大来源:RDB Table、Client API、Files 如何构造通用性的代码模板实现向HBase表的转换,是一个值得考虑的问题。这篇文章着重讲解RDB表向HBase表的转换。 首先,我们需要分别构造rdb和hba…...

10:00面试,10:06就出来了,问的问题有点变态。。。
从小厂出来,没想到在另一家公司又寄了。 到这家公司开始上班,加班是每天必不可少的,看在钱给的比较多的份上,就不太计较了。没想到8月一纸通知,所有人不准加班,加班费不仅没有了,薪资还要降40%…...
【Python】: Django Web开发实战(详细教程)
Python Django全面介绍 Django是一个非常强大的Python Web开发框架,它以"快速开发"和"干净、实用的设计"为设计宗旨。本文将从Django的基本概念开始,逐渐引导大家理解如何使用Django构建复杂的web应用程序。 Django基本概念与原理…...
)
突破编程_C++_C++11新特性(tuple)
1 std::tuple 简介 1.1 std::tuple 概述 std::tuple 是一个固定大小的不同类型值的集合,可以看作 std::pair 的泛化,即 std::pair 是 std::tuple 的一个特例,其长度受限为 2。与 C# 中的 tuple 类似,但 std::tuple 的功能更为强…...
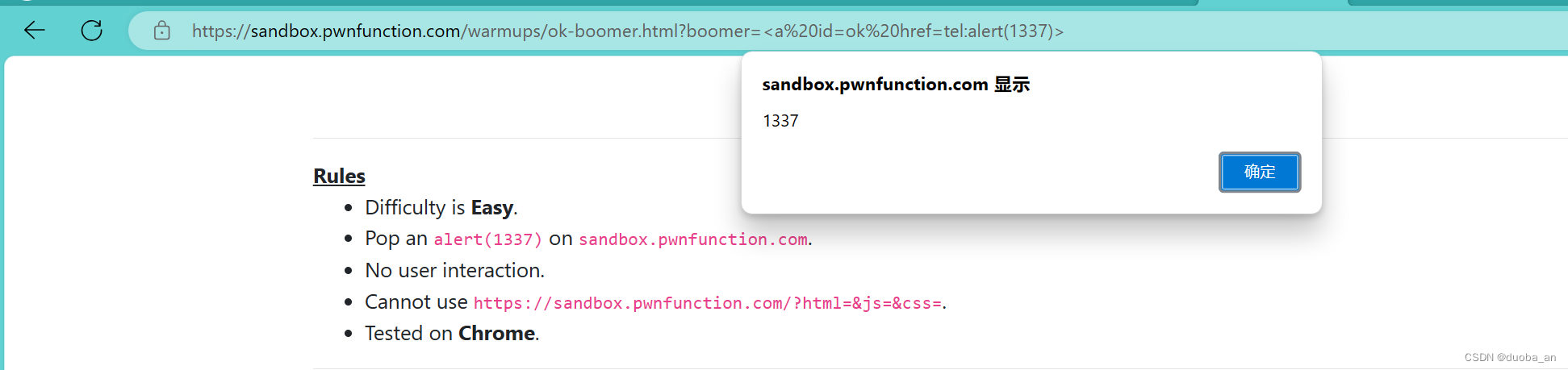
xss.pwnfunction(DOM型XSS)靶场
环境进入该网站 Challenges (pwnfunction.com) 第一关:Ma Spaghet! 源码: <!-- Challenge --> <h2 id"spaghet"></h2> <script>spaghet.innerHTML (new URL(location).searchParams.get(somebody) || "Somebo…...

安装 docker 和 jenkins
安装 docker #安装 软件包 docker yum install -y yum-utils device-mapper-persistent-data lvm2#设置 yum 源 yum-config-manager --add-repo https://download.docker.com/linux/centos/docker-ce.repo yum-config-manager --add-repo http://mirrors.aliyun.com/docker-c…...

jni入门学习 CMakeLists脚本
在 Android Studio 中使用 CMake 可以编译 C/C 代码,这为开发者提供了在 Android 应用中嵌入本地代码的能力。下面是关于在 Android Studio 中使用 CMake 编译的详细说明: 1. 创建 CMakeLists.txt 文件: 首先,你需要在项目的根目…...

如何在没有向量数据库的情况下使用知识图谱实现RAG
引言 传统上,为大型语言模型(LLMs)提供长期记忆通常涉及到使用检索增强生成(RAG)解决方案,其中向量数据库作为长期记忆的存储机制。然而,我们是否能在没有向量数据库的情况下达到相同效果呢&am…...
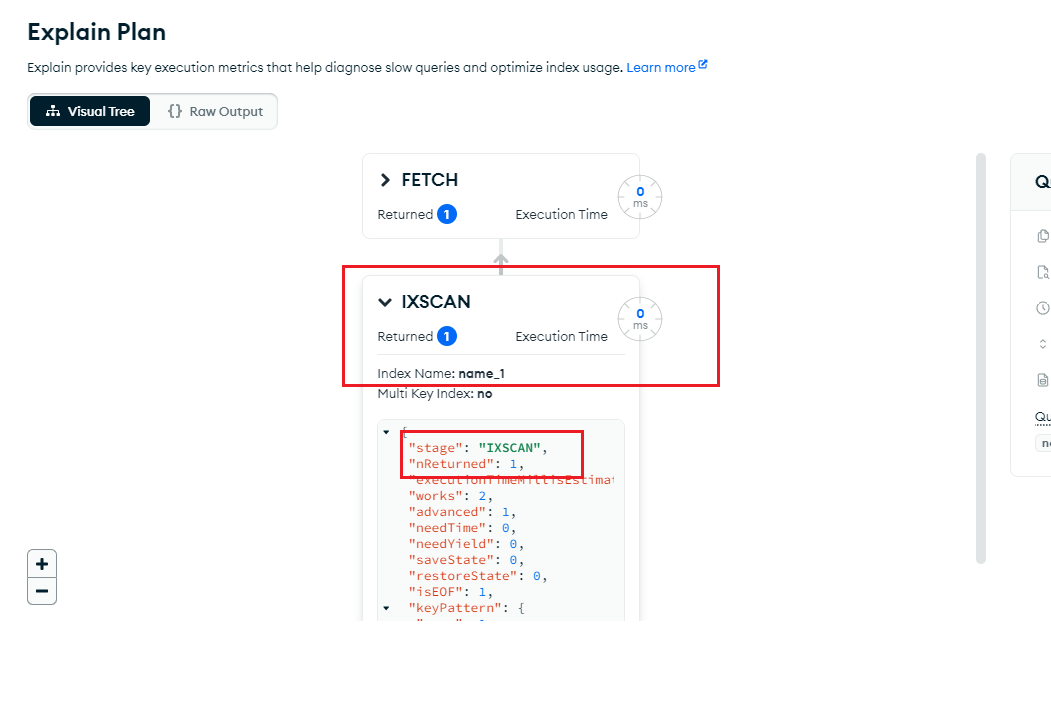
6.如何判断数据库搜索是否走索引?
判断是否使用索引搜索 索引在数据库中是一个不可或缺的存在,想让你的查询结果快准狠,还是需要索引的来帮忙,那么在mongo中如何判断搜索是不是走索引呢?通常使用执行计划(解释计划、Explain Plan)来查看查询…...

Java并发编程的性能优化方案中,哪些方法比较常用
在Java并发编程的性能优化方案中,以下是一些常用的方法: 线程池的使用: 线程池可以复用线程,避免频繁地创建和销毁线程,从而提高系统性能。常用的线程池有FixedThreadPool、CachedThreadPool等。根据任务特性选择合适…...

C语言学习日志
大家好,我是一名物联网工程专业的大学生,很高兴认识大家,同时这也是我的第一篇博客。1.我的编程目标: 学习c语言主要是为了对后面c的学习做铺垫,完善我的大创项目,为我的简历增添色彩,收到一份好…...

王杨安企cms:批量3000个游戏下载指定链接导入方法!
我只做游戏下载站和其他管道项目,今天就简单讲解一下如何用安企cms下载站模板,批量导入几千个游戏指定下载链接!其他老站长一般都是用api接口,但是接口对于入门的新手有难度,我也是入门级的新手,所以只说入…...

OneNet平台生成token注意事项
1、如果生成的是设备级鉴权 设备级鉴权时,res字段为products/{产品id}/devices/{设备名},key为设备级key key里面填的应该是设备的密钥生成token的工具截图2、如果生成的是产品/用户级鉴权 产品级鉴权时,res字段为products/{产品id}ÿ…...

一根网线搞定光猫供电:用TP-LINK TL-POE150S+TL-POE10R实现千兆POE分离的保姆级教程
一根网线搞定光猫供电:用TP-LINK TL-POE150STL-POE10R实现千兆POE分离的保姆级教程 家里只有一根网线入户,却要同时解决光猫供电和千兆网络传输?这个看似无解的难题,其实只需要两件标准POE设备就能完美解决。作为一名折腾过无数家…...

别再死记硬背了!用‘冯诺依曼’和‘TCP/IP’模型,手把手拆解你浏览器访问GitHub的全过程
从输入URL到页面加载:浏览器访问GitHub的完整技术解析 当你在浏览器地址栏输入"https://github.com"并按下回车时,这台看似简单的操作背后隐藏着一系列精密的计算机系统协作。本文将用技术视角还原这个过程的每个关键环节,让你理解…...

从ZkClient到Curator:Spring Boot项目里ZooKeeper客户端选型与实战避坑指南
从ZkClient到Curator:Spring Boot项目中ZooKeeper客户端的技术选型与实战指南 在分布式系统架构设计中,服务协调与状态管理一直是核心挑战之一。作为分布式协调服务的经典解决方案,ZooKeeper凭借其强一致性、高可用性和丰富的通知机制&#x…...

为什么你的RTX 4090只能同时编码3路视频?聊聊NVENC限制背后的商业逻辑与‘曲线救国’方案
为什么RTX 4090只能同时编码3路视频?解码NVENC限制的商业密码与技术突围 当你在直播推流、影视渲染或AI训练场景中,突然遭遇"RuntimeError: NvEncoder : m_nvenc.nvEncOpenEncodeSessionEx returned error 10"的红色警告,这很可能触…...
)
OpenSfM实战调优:如何通过修改config.yaml提升三维重建精度与速度(以Model House数据集为例)
OpenSfM实战调优:通过config.yaml精准控制三维重建质量与效率 当你的OpenSfM项目已经能够跑通基础流程,却在重建质量或运行速度上遇到瓶颈时,真正的挑战才刚刚开始。Model House这类包含丰富纹理但结构复杂的数据集,往往能暴露出参…...
)
告别龟速:最新版cnpm淘宝镜像配置全攻略(单次/永久/场景化指南)
1. 为什么你需要淘宝镜像? 如果你经常使用npm安装前端依赖,大概率遇到过这样的场景:盯着命令行界面,看着进度条像蜗牛一样缓慢前进,甚至时不时卡住报错。这种情况在国内开发者中非常普遍,因为npm默认的仓库…...

你的 Vue v-model,VuReact 会编译成什么样的 React 代码?
VuReact 是一个能将 Vue 3 代码编译为标准、可维护 React 代码的工具。今天就带大家直击核心:Vue 中常见的 v-model 指令经过 VuReact 编译后会变成什么样的 React 代码? 前置约定 为避免示例代码冗余导致理解偏差,先明确两个小约定&#x…...