机器人路径规划:基于冠豪猪优化算法(Crested Porcupine Optimizer,CPO)的机器人路径规划(提供MATLAB代码)
一、机器人路径规划介绍
移动机器人(Mobile robot,MR)的路径规划是 移动机器人研究的重要分支之,是对其进行控制的基础。根据环境信息的已知程度不同,路径规划分为基于环境信息已知的全局路径规划和基于环境信息未知或局部已知的局部路径规划。随着科技的快速发展以及机器人的大量应用,人们对机器人的要求也越来越高,尤其表现在对机器人的智能化方面的要求,而机器人自主路径规划是实现机器人智能化的重要步骤,路径规划是指规划机器人从起点位置出发,无碰撞、安全到达指定目标位置的最优路径。目前,常用的移动机器人全局路径规划方法很多,如栅格法和人工势场法。对于栅格法,当空间增大时,所需存储空间剧增,决策速度下降;而人工势场法容易产生局部最优解问题和死锁现象。随着智能控制技术的发展,出现了如遗传算法算法、粒子群优化算法、麻雀搜索算法、灰狼优化算法、鲸鱼优化算法等。
参考文献:
[1]史恩秀,陈敏敏,李俊,等.基于蚁群算法的移动机器人全局路径规划方法研究[J].农业机械学报, 2014, 45(6):5.DOI:CNKI:SUN:NYJX.0.2014-06-009.
[2]朱庆保,张玉兰.基于栅格法的机器人路径规划蚁群算法[J].机器人, 2005, 27(2):5.DOI:10.3321/j.issn:1002-0446.2005.02.008.
[3]曹新亮,王智文,冯晶,等.基于改进蚁群算法的机器人全局路径规划研究[J].计算机工程与科学, 2020, 42(3):7.DOI:CNKI:SUN:JSJK.0.2020-03-027.
二、栅格地图环境搭建
首先建立移动机器人工作环境,设移动机器人的工作空间为二维空间(记为RS),工作环境中的障碍物即为机床。在机器人运动过程中,障碍物为静止且大小不发生变化。按栅格法划分RS,移动机器人在栅格间行走。无障碍物的栅格为可行栅格,有障碍物的栅格为不可行栅格。栅格集包含所有栅格。栅格标识有:直角坐标法和序号法。本文采用序号标识法。
在移动机器人工作空间下按从左到右,从上到下的顺序,依次标记为序号1,2,3,···,n,每一个序号代表一个栅格。为了避免移动机器人与障碍物发生碰撞,可以将障碍物膨胀,障碍物在占原有栅格的同时,再占多个栅格,按 个栅格算。这种划分方法简单实用,能够满足环境模型与真实情况相符。从而使移动机器人在路径规划时畅通无阻。令S={1,2,3,···,N}为栅格序号集。根据上述对应关系,可知g(0,0)的序号为1,g(1,0)序号为2,直至g(X,Y)的序号为n。规划起始位置、目标位置均为任意且都属于S(但不在同一栅格内)。
在实际工作环境中,移动机器人工作环境是复杂多变的,且为三维空间。为了便于研究,本文对环境进行简化建模。栅格法是一种常用的环境表示方法,因其简单方便(二维环境),环境建模的复杂性小,因而本文环境建模采用栅格法。在栅格地图中,工作环境被划分为很多栅格,其中包括有障碍物和无障碍的栅格,在仿真程序中用0表示此栅格无障碍物,机器人可以通过此栅格,用1表示栅格有障碍物,机器人无法通过,需选择其他栅格。栅格的尺寸大小可根据工作环境中的障碍物尺寸以及安全距离进行设置。为了实现程序仿真,需要对栅格进行标识,如下图所示,以20x20的栅格环境为例来说明。
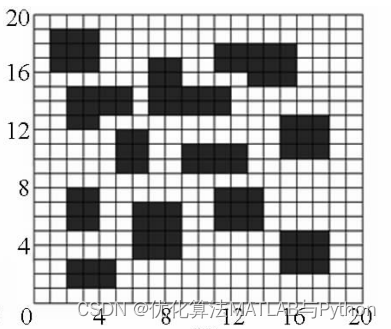
如上图所示,白色栅格表示无障碍物的栅格,黑色栅格则表示有障碍物的栅格,在地图中对每个栅格编号,不同序号的栅格在坐标系中的坐标可用下式来表示:
x=mod(Ni/N)-0.5
y=N-ceil(Ni/N)+0.5
其中,mod为取余运算,ceil表示向后取整,Ni是对应栅格的标号,N表示每 列的栅格数量,取栅格中心位置作为栅格在坐标系中的坐标。这样机器人全局路径规划的问题就转变成了利用算法在栅格地图上寻找由起始点到目标点的有序的栅格子集,这些栅格子集的中心连线便是算法寻找的路径。
参考文献:
[1]史恩秀,陈敏敏,李俊,等.基于蚁群算法的移动机器人全局路径规划方法研究[J].农业机械学报, 2014, 45(6):5.DOI:CNKI:SUN:NYJX.0.2014-06-009.
[2]曹新亮,王智文,冯晶,等.基于改进蚁群算法的机器人全局路径规划研究[J].计算机工程与科学, 2020, 42(3):7.DOI:CNKI:SUN:JSJK.0.2020-03-027.
三、冠豪猪优化算法
冠豪猪优化算法(Crested Porcupine Optimizer,CPO)由Mohamed Abdel-Basset等人于2024年提出,该算法模拟冠豪猪的四种不同保护机制:视觉、听觉、气味和物理攻击。第一和第二防御技术(视觉和听觉)反映了CPO的探索行为,而第三和第四防御策略(气味和物理攻击)反映了CPO的剥削行为。该算法提出了一种称为循环种群减少技术的新策略,以模拟并非所有CP激活其防御机制,而只激活那些受到威胁的CP的介词。这种策略促进了趋同率和种群多样性。2024最新算法:冠豪猪优化算法(Crested Porcupine Optimizer,CPO)求解23个基准函数(提供MATLAB代码)_冠豪猪优化算法与cs算法比较-CSDN博客
参考文献
[1]Abdel-Basset M, Mohamed R, Abouhawwash M. Crested Porcupine Optimizer: A new nature-inspired metaheuristic[J]. Knowledge-Based Systems, 2024, 284: 111257.
四、冠豪猪优化算法求解机器人路径规划
4.1部分代码
%%
S = [1 1]; %起点
E = [20 20]; %终点
[ub,dimensions] = size(G);
dim = dimensions - 2;
%% 参数设置
Max_iter= 100; % 最大迭代次数
SearchAgents_no = 50; % 种群数量
X_min = 1;
lb=1;
fobj=@(x)fitness(x);
[Best_score,Best_NC,Convergence_curve]=CPO(SearchAgents_no,Max_iter,lb,ub,dim,fobj);toc
%% 结果分析
global_best = round(Best_NC);
figure(1)
plot(Convergence_curve,'r-','linewidth',2.5)
xlabel('Iteration');
ylabel('Fitness');
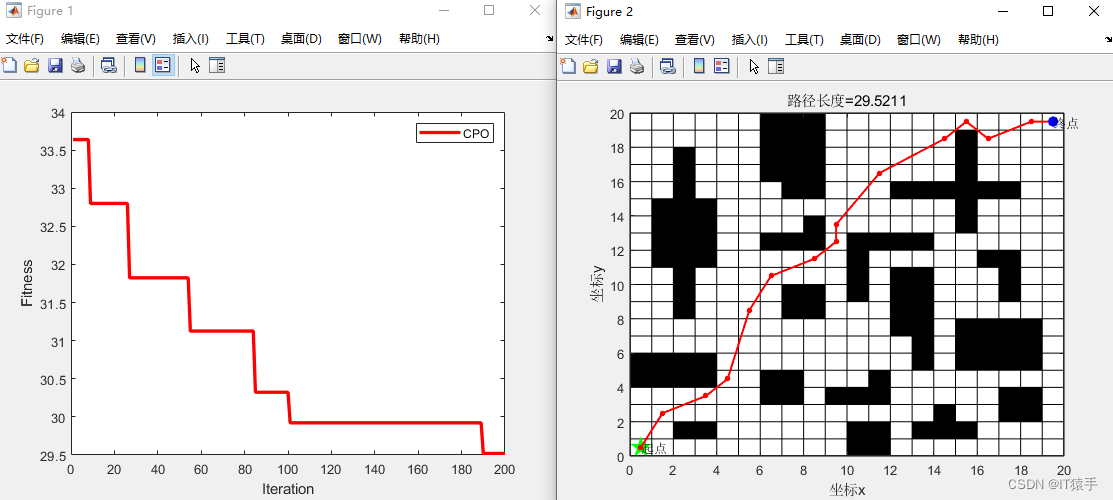
legend('CPO')4.2部分结果
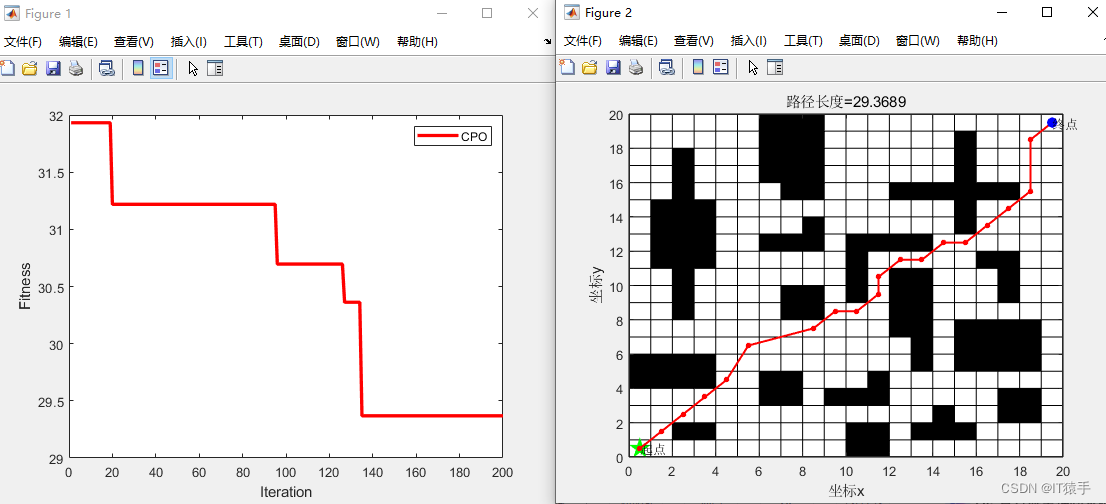
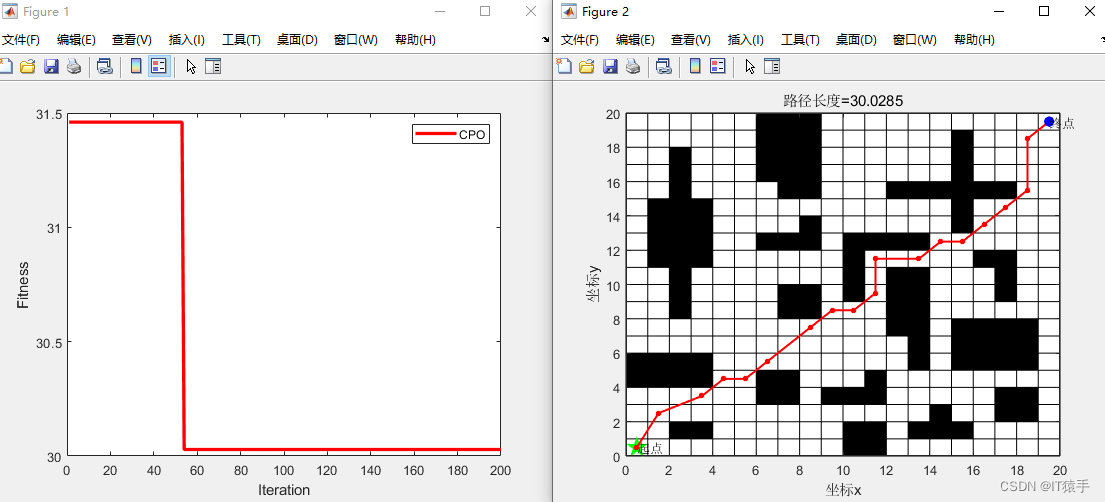
五、完整MATLAB代码
机器人路径规划:基于冠豪猪优化算法(CPO)的机器人路径规划(matlab代码)
相关文章:
机器人路径规划:基于冠豪猪优化算法(Crested Porcupine Optimizer,CPO)的机器人路径规划(提供MATLAB代码)
一、机器人路径规划介绍 移动机器人(Mobile robot,MR)的路径规划是 移动机器人研究的重要分支之,是对其进行控制的基础。根据环境信息的已知程度不同,路径规划分为基于环境信息已知的全局路径规划和基于环境信息未知或…...

探索.NET中的定时器:选择最适合你的应用场景
概述:.NET提供多种定时器,如 System.Windows.Forms.Timer适用于UI,System.Web.UI.Timer用于Web,System.Diagnostics.Timer用于性能监控,System.Threading.Timer和System.Timers.Timer用于一般定时任务。在.NET 6及以上…...

5467: 【搜索】流浪奶牛
题目描述 吃不到饭的奶牛Bessie一气之下决定离开农场,前往阿尔费茨山脉脚底下的农场(听说那儿的草极其美味)投靠她的亲戚Jimmy。但是前往目的地的山路崎岖,Bessie又没有吃饭,她需要尽量保存体力,以最轻松的…...

spring boot整合elasticsearch实现查询功能
第一步、添加依赖(注意版本对应关系)根据spring boot版本选择合适的版本 <dependency><groupId>org.elasticsearch</groupId><artifactId>elasticsearch</artifactId><version>7.6.2</version></dependenc…...

白嫖阿里云程序员日历
https://developer.aliyun.com/topic/lingma/activities/202403?taskCode14508&recordId44f3187f7950776f494eec668a62c65f#/?utm_contentm_fission_1 「通义灵码 体验 AI 编码,开 AI 盲盒」 打开链接直接领就行了...
ubuntu20.04搭建rtmp视频服务
1.安装软件 sudo apt-get install ffmpeg sudo apt-get install nginx sudo apt-get install libnginx-mod-rtmp 2.nginx配置 修改/etc/nginx/nginx.conf文件,在末尾添加: rtmp {server {listen 1935;application live {live on;}} } 3.视频测试 本…...

Request failed with status code 504,Gateway time out
问题描述: 部署在测试环境的项目在执行某功能时,后台程序在执行过程中,前端控制台在一分钟左右会报出Request failed with status code 504,Gateway time out异常。但是在本地开发环境会正常运行,并不会报出异常。 问题…...

四、Elasticsearch 进阶
自定义目录 4.1 核心概念4.1.1 索引(Index)4.1.2 类型(Type)4.1.3 文档(Document)4.1.3 字段(Field)4.1.5 映射(Mapping)4.1.6 分片(Shards&#…...

海外云手机如何帮助亚马逊引流?
随着全球化的推进,出海企业和B2B外贸企业越来越注重海外市场的开拓,这已成为企业争夺市场份额的重要策略。本文将重点探讨海外云手机在优化亚马逊店铺引流方面的作用和优势。 海外云手机是一种在云端运行的虚拟手机,能够在单一芯片上多开几个…...
Gateway新一代网关
Gateway新一代网关 1、概述 Cloud全家桶中有个很重要的组件就是网关,在1.x版本中都是采用的Zuul网关; 但在2.x版本中,zuul的升级一直跳票,SpringCloud最后自己研发了一个网关SpringCloud Gateway替代Zuul。 官网&…...
Simulink中Scope图像导出在MATLAB上重新画
在Simulink中,Scope是一个常用的可视化工具,用于实时显示仿真过程中的信号波形。 1. 从Simulink Scope中导出数据 首先,您需要在Simulink的Scope中捕获或记录想要导出的数据。这通常通过配置Scope的“Logging”选项来实现。确保在仿真过程中…...

利用opencv获取系统时间
前一篇《c获取系统时间的方法-CSDN博客》博客介绍了如何在不同系统中获取系统时间的方法,但这些方法受系统的限制,如time.h就只能在Linux系统中使用。而opencv则不受系统限制,示例代码如下, #include <opencv2/opencv.hpp>…...
Go环境变量配置,及GOROOT、GOPATH的区别
一、安装Go go下载地址: https://golang.google.cn/dl/ windows下载安装,有两种方式。解压和直接安装 方式一:直接下载安装包。以.msi结尾的文件。例如: go1.22.1.windows-amd64.msi 下载后,双击后一直点下一步即…...

爬虫系列-CSS基础语法
🌈个人主页:会编程的果子君 💫个人格言:“成为自己未来的主人~” CSS全称层叠样式表 ,主要用来定义页面内容展示效果的一门语言,HTML:页面骨架,素颜CSS:页面效果美化:…...

获取比特币和莱特币的实时价格
数据来源: https://datacenter.jin10.com/reportType/dc_bitcoin_current 代码: import akshare as ak import pandas as pd pd.set_option(display.max_columns, None) pd.set_option(display.max_rows, None) pd.set_option(display.width, 1000)cr…...

Axure案例分享—折叠面板(附下载地址)
今天和大家分享的Axure案例是折叠面板 折叠面板是移动端APP中常见的组件之一,有时候也称之为手风琴。咱们先看下Axure画出的折叠面板原型效果,然后再对该组件进行详细讲解。 一、功能介绍 折叠或展开多个面板内容,默认为展开一项内容&…...

SQLiteC/C++接口详细介绍sqlite3_stmt类(五)
返回:SQLite—系列文章目录 上一篇:SQLiteC/C接口详细介绍sqlite3_stmt类(四)- 下一篇: 无 12. sqlite3_bind_text16函数 sqlite3_bind_text16函数用于将UTF-16编码的文本数据(字符串)绑定…...
单片机-- 数电(3)
编码器与译码器 译码 :将二进制代码转化为其他进制的代码 编码 :就是将其他代码转换为二进制码 编码器的类型 1二进制编码器 用n位二进制数码对2的n次方个输入信号进行编码的电路 2二-十进制编码器 将0到9十个十进制数转化为二进制代码的电路 2…...
基于Java中的SSM框架实现在线通用旅游平台网站系统项目【项目源码+论文说明】计算机毕业设计
基于Java中的SSM框架实现在线通用旅游平台网站系统演示 摘要 近几年来,计算机网络的发展得到了飞速的提升,由此展开的一系列行业大洗牌也由此开始。早些年只是人们只是对于计算机和互联网有了些基础的认识,现在它正在悄悄的改变着我们生活的…...
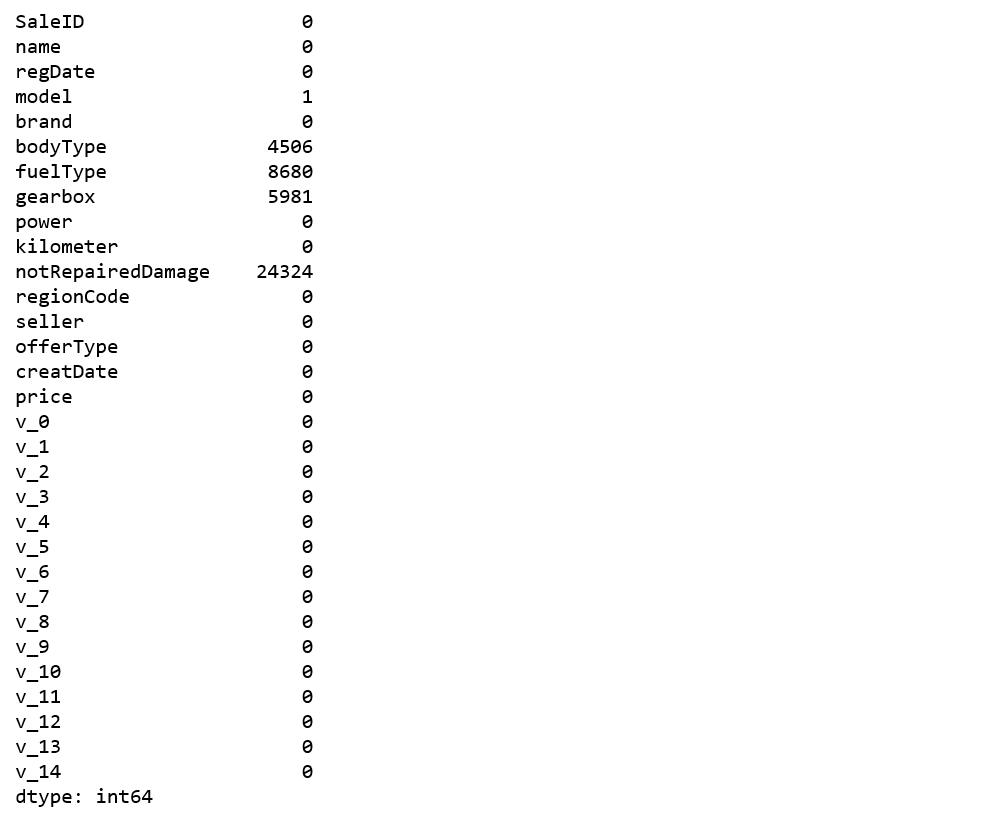
「数据分析」之零基础入门数据挖掘
摘要:对于数据挖掘项目,本文将学习应该从哪些角度分析数据?如何对数据进行整体把握,如何处理异常值与缺失值,从哪些维度进行特征及预测值分析? 探索性数据分析(Exploratory Data Analysis&#…...

Visual Paradigm 17.0 团队协作新功能实测:手把手教你用项目模板和文件夹管理提效
Visual Paradigm 17.0 团队协作实战指南:从模板配置到文件夹管理的高效工作流在敏捷开发团队中,项目启动速度和资产管理的规范性往往直接影响整体效率。Visual Paradigm 17.0针对这一痛点推出的团队协作增强功能,特别是服务器端项目模板和文件…...

腾讯 Marvis 初级使用教程——从安装到上手
腾讯最新系统级AI助手Marvis(2026年5月20日发布),官网 https://marvis.qq.com,主打“一句话操作电脑”、跨端协同、GUI Agent执行。虽然是个【小龙虾】,但上手其实不难。这篇就简单写写 Marvis 的安装和基础使用&#…...

AI圈神秘领袖Ilya一幅画引爆全网,OpenAI三件大事暗示AGI时代将至?
AI圈神秘精神领袖Ilya在Instagram上传一幅画引发疯狂解读,与此同时,OpenAI连续公布数学成果、升级Codex、筹备IPO,释放AGI到来的强烈信号。Ilya画作引猜测Ilya上传的画中,罗丹的「思考者」踩在芯片Die Shot上,右下角签…...

【紧急预警】Lindy衰减临界点已提前至第8.3个月!2024最新《营销自动化寿命健康度白皮书》限时开放前500份
更多请点击: https://kaifayun.com 第一章:Lindy衰减临界点的理论重构与实证突破 Lindy效应传统上描述“越老越长寿”的非线性生存规律,但其在现代软件系统、开源生态与协议层技术栈中的适用边界正遭遇结构性挑战。本文首次将Lindy模型从静…...

武汉国电华美串联谐振试验装置,现场用着心里有底
在高压试验现场干了这么多年,这位老师傅常说,一台好的串联谐振装置,就是试验人员的胆。面对GIS、大型变压器、超高压电缆这些大电容试品,没有趁手的谐振设备,交流耐压试验根本没法干。16875kVA/225kV这个规格ÿ…...

NBTExplorer:让Minecraft数据编辑从专业工具变成人人可用的可视化平台
NBTExplorer:让Minecraft数据编辑从专业工具变成人人可用的可视化平台 【免费下载链接】NBTExplorer A graphical NBT editor for all Minecraft NBT data sources 项目地址: https://gitcode.com/gh_mirrors/nb/NBTExplorer 你是否曾经面对Minecraft世界文件…...

基于Cynthion逆向USB协议,为DP100电源开发Linux控制软件
1. 项目概述:用Cynthion嗅探USB,为DP100电源打造Linux软件作为一名长期在Linux环境下折腾硬件和嵌入式开发的爱好者,我经常遇到一个头疼的问题:很多不错的桌面小设备,比如电源、示波器、逻辑分析仪,它们的官…...
)
ArduPilot飞行模式实战:从代码角度看Stabilize、Acro、Loiter模式如何切换(附避坑指南)
ArduPilot飞行模式深度解析:从状态机到实战避坑指南 在开源飞控领域,ArduPilot以其强大的飞行模式系统著称。不同于普通用户只需了解模式功能,开发者更需要掌握模式切换的底层机制——这直接关系到飞行安全与二次开发效率。本文将带您深入Sta…...

【RT-DETR实战】070、模型分析工具:PyTorch Profiler性能分析
上周在部署RT-DETR到边缘设备时遇到一个诡异现象:模型推理时延波动极大,有时30ms,偶尔突然跳到200ms。 盯着代码看了半天没发现逻辑问题,数据流也正常。这种时候,靠猜是没用的,必须上性能分析工具——PyTorch Profiler。 今天我们就来聊聊怎么用它揪出那些藏在细节里的…...

机器学习加速分子晶体偏振拉曼光谱模拟:非谐效应与准谐效应的分离
1. 项目概述:当机器学习遇见偏振拉曼光谱 偏振-取向拉曼光谱(PO-Raman)一直是我在材料光谱分析领域里觉得既迷人又头疼的技术。它就像给材料的“分子指纹”加上了方向滤镜,能揭示出振动模式在空间中的对称性和各向异性,…...