【ROS | OpenCV】在ROS中实现多版本OpenCV、cv_bridge共存:安装与配置指南
在 Ubuntu 20.04 中,ROS Noetic 默认安装的 OpenCV 版本为 4.2.0。如果您需要确认系统中已安装的 OpenCV 版本,可以使用以下命令:
sudo find / -iname "*opencv*"
然而,许多开源算法都是基于 OpenCV 3 编写的,如果要修改代码就非常麻烦。另一方面,一些程序可能可能又依赖高版本的OpenCV,比如4.5版本。这时就需要在系统中安装多个版本的OpenCV。
为了实现多个版本的共存,我们希望在不删除自带的 OpenCV 4 的情况下,编译安装 OpenCV 3 及其 contrib 库,并使得 cv_bridge 能够支持多版本。
本教程将介绍在不影响ROS中自带的 OpenCV 和 cv_bridge 的情况下,如何实现多版本 OpenCV 和 cv_bridge 的共存,并且将说明如何修改 CMakeLists 文件来找到指定版本的OpenCV和cv_bridge。本教程理论上对Ubuntu版本与ROS版本没有限制,并且对安装的OpenCV大版本(3或4)也没有要求。只需要注意OpenCV 3 的cv_bridge对应为melodic,而OpenCV 4则为noetic,在下载源码时选择对应版本即可。
0. 安装OpenCV依赖项
首先,更新源以确保系统处于最新状态:
sudo apt update
接着,安装所需的依赖项:
sudo apt-get install build-essential cmake git pkg-config libavcodec-dev libavformat-dev libswscale-dev libatlas-base-dev gfortran zlib1g-dev ccache autoconf automake libtool checkinstall
为了解决依赖问题,需要添加新的源。然后,安装 libjasper:
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt update
sudo apt install libjasper1 libjasper-dev
接下来,安装常用的图像工具包以及视频 I/O 包:
sudo apt-get install libjpeg-dev libjpeg8-dev libtiff5-dev libjasper-dev libpng-dev
sudo apt install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
1. 编译 OpenCV 3 及其 contrib 库的源代码:
接下来,需要下载并编译 OpenCV 3 的源代码。可以从官方GitHub下载源代码,并按照以下步骤进行编译安装:
首先,下载 OpenCV 3 的源代码并切换到对应版本:
git clone https://github.com/opencv/opencv.git -b 3.4.14
mv opencv opencv3.4.14
cd opencv3.4.14
接着,下载 OpenCV contrib 模块(请注意版本的对应):
git clone https://github.com/opencv/opencv_contrib.git -b 3.4.14
然后,返回到 opencv 目录,并创建并进入 build 目录:
cd ../
mkdir build
cd build
接下来,配置 OpenCV 的编译选项:
cmake -DOPENCV_EXTRA_MODULES_PATH=../opencv_contrib/modules \-DCMAKE_BUILD_TYPE=RELEASE \-DWITH_TBB=ON \-DWITH_V4L=ON \-DCMAKE_INSTALL_PREFIX=/usr/local/opencv3.4.14 \-DBUILD_opencv_vtk=OFF \-DWITH_VTK=OFF \..
执行完毕后你大概率会看到编译出现错误:
-- Configuring incomplete, errors occurred!
See also "/home/user/libraries/opencv3.4.14/build/CMakeFiles/CMakeOutput.log".
See also "/home/user/libraries/opencv3.4.14/build/CMakeFiles/CMakeError.log".
这里的错误来自于各种各样的依赖项没有找到或者没有安装,需要翻看报错信息来确定具体问题。可以百度/谷歌相关关键词(比如Could not find xxx)查找解决办法,这里只列举我遇到的一些依赖项问题:
--- Could NOT find PythonLibs (missing: PYTHON_LIBRARIES PYTHON_INCLUDE_DIRS)
...
No package 'gstreamer-base-1.0' found
...
looking for ccache --not found
...
-- Could NOT find JNI (missing: JAVA_AWT_LIBRARY JAVA_JVM_LIBRARY JAVA_INCLUDE_PATH JAVA_INCLUDE_PATH2 JAVA_AWT_INCLUDE_PATH)
解决方法是安装 Python 相关的开发库、gstreamer 相关库、ccache、OpenBLAS 或者 Atlas 、JNI(Java Native Interface)……:
sudo apt-get install python-dev
sudo apt install libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev
sudo apt-get install ccache
sudo apt-get install liblapack-dev liblapacke-dev libopenblas-dev
sudo apt install default-jdk
最后,可能会遇到关于 vtkParseOGLExt 的错误,可以通过复制 vtk7 文件解决:
sudo cp ./vtk7 ./vtk
完成以上步骤并且确认没有任何依赖性的问题之后,可以继续进行编译并安装 OpenCV:
make -j12
sudo make install
最好不要满线程!!!可能会卡死。可以先用htop看自己电脑最高可以多线程,然后适当减少一些编译用的线程数
2. 安装cv_bridge
cv_bridge 是用于在ROS和OpenCV图像之间进行转换的重要工具。在ROS Noetic中,默认的 cv_bridge 链接到了 OpenCV 4。为了确保ROS的完整性,并且保持 OpenCV 4 的正常使用,我们不建议卸载默认的 cv_bridge。
为了额外安装适配于 OpenCV 3 的 cv_bridge,首先需要从 cv_bridge 的 GitHub 仓库下载 ros_melodic 版本的 cv_bridge:cv_bridge GitHub
下载后,进入 vision_opencv-melodic/cv_bridge 目录,并修改其中的 CMakeLists.txt 文件,有以下两个目的:
(1)将寻找 Boost 的方式改为不区分 Python 版本,防止编译时找不到 boost_python3
(2)添加对自己安装的 OpenCV 3 的路径的设置,防止找不到与 OpenCV 版本兼容的配置文件
具体修改方式如下,注意修改的是下载的cv_bridge中CMakeLists.txt。
在文件开头添加以下内容
cmake_minimum_required(VERSION 2.8)
project(cv_bridge)# 添加下面的内容
set(OpenCV_DIR /usr/local/opencv3.4.14/share/OpenCV)
set(OpenCV_INCLUDE_DIRS "/usr/local/opencv3.4.14/include")
set(OpenCV_LIBRARIES "/usr/local/opencv3.4.14/lib")
在文件中找到以下代码:
if(NOT ANDROID)find_package(PythonLibs)if(PYTHONLIBS_VERSION_STRING VERSION_LESS 3)find_package(Boost REQUIRED python)else()find_package(Boost REQUIRED python3)endif()
else()find_package(Boost REQUIRED)
endif()
修改为:
if(NOT ANDROID)find_package(PythonLibs)find_package(Boost REQUIRED python)
else()find_package(Boost REQUIRED)
endif()
完成以上修改后,保存并退出 CMakeLists.txt 文件。
接下来,需要在 vision_opencv-melodic/cv_bridge 目录中编译 cv_bridge:
cd vision_opencv-melodic/cv_bridge
mkdir build
cd build
cmake ..
make -j12
最后,使用 make install 命令将 cv_bridge 安装到系统中:
sudo make install DESTDIR=/usr/local/cv_bridge_melodic
这样就完成了 cv_bridge 的安装。现在,您可以在您的 ROS 系统中同时使用适配于 OpenCV 3 的 cv_bridge 和系统自带的 cv_bridge(链接到 OpenCV 4)了。
3. 修改ROS包中的CMakeLists.txt来指定OpenCV和cv_bridge版本
最后,需要在 ROS 包的 CMakeLists.txt 文件中设置 OpenCV 和 cv_bridge 的链接路径。可以按照以下方式设置:
# 在 project(xxx) 后面添加以下两行
set(cv_bridge_DIR /usr/local/cv_bridge_melodic/usr/local/share/cv_bridge/cmake)
set(OpenCV_DIR /usr/local/opencv3.4.14/share/OpenCV)
需要注意的是,对所有使用了 OpenCV 或者 cv_bridge 的 CMakeLists 都需要进行相应的修改,以确保正确链接到指定版本的库。
本教程到此结束。如果在安装过程中遇到任何问题,欢迎在评论中提出。
相关文章:

【ROS | OpenCV】在ROS中实现多版本OpenCV、cv_bridge共存:安装与配置指南
在 Ubuntu 20.04 中,ROS Noetic 默认安装的 OpenCV 版本为 4.2.0。如果您需要确认系统中已安装的 OpenCV 版本,可以使用以下命令: sudo find / -iname "*opencv*"然而,许多开源算法都是基于 OpenCV 3 编写的࿰…...

Docker容器化技术(docker-compose示例:部署discuz论坛和wordpress博客,使用adminer管理数据库)
安装docker-compose [rootservice ~]# systemctl stop firewalld [rootservice ~]# setenforce 0 [rootservice ~]# systemctl start docker[rootservice ~]# wget https://github.com/docker/compose/releases/download/v2.5.0/docker-compose-linux-x86_64创建目录 [rootse…...

微分学<6>——Taylor公式
索引 Taylor公式Taylor公式的定性分析定理6.1 Taylor公式(Peano余项) Taylor公式的定量分析定理6.2 Taylor公式(Lagrange余项) Taylor公式 Taylor公式的定性分析 定理6.1 Taylor公式(Peano余项) 若函数 f ( x ) f\left ( x \right ) f(x)在 x 0 x_{0} x0处的 n n n阶导数均…...

检索增强生成(RAG)应用的构建:LangChain与LlamaIndex的比较与选择
对于我要做RAG应用,我应该使用两者中的哪一个。或者说还是都使用? 在人工智能领域,检索增强生成(RAG)应用正变得越来越受欢迎,因为它们能够结合大型语言模型(LLMs)的自然语言处理能力…...
免费PDF转换和编辑工具 PDFgear 2.1.4
PDFgear是一款功能强大的 PDF 阅读及转换软件。 它支持多种文件格式的转换和编辑,同时还提供了丰富的功能模块,如签名、表单填写等,方便用户进行多样化的操作。 该软件界面简洁美观,操作简单易懂,适合不同层次的用户…...

uniapp,导航栏(切换项)有多项,溢出采取左滑右滑的形式展示
一、实现效果 当有多项的导航,或者说切换项,超出页面的宽度,我们采取可滑动的方式比较好一些!并且在页面右边加个遮罩,模拟最右边有渐变效果! 二、实现代码 html代码: <!-- 头部导航栏 --…...

计算机网络面经-什么是IPv4和IPv6?
前言 Internet协议(IP)是为连接到Internet网络的每个设备分配的数字地址。它类似于电话号码,是一种独特的数字组合,允许用户与他人通信。IP地址主要有两个主要功能。首先,有了IP,用户能够在Internet上被识别…...

彻底讲透:如何写sql能够有效的使用到复合索引?
在MySQL中,有效的使用复合索引需要确保查询条件按照索引定义的列顺序进行。以下是一个具体的例子: 假设我们有一个sales表,它有四个字段:customer_id、product_category、sale_date和amount。为了优化包含这些字段查询的性能&…...
?)
在Spring Boot中如何处理跨域请求(CORS)?
什么是跨域? 跨域(Cross-Origin Resource Sharing,CORS)是一种机制,它允许在 Web 页面上运行的脚本能够请求从不同源(域名、协议或端口)的资源。在浏览器安全策略中,有一条称为同源…...
好就业三种专业#信息安全#云计算#网络工程
一、信息安全专业 根据2021年网络安全宣传周白皮书的观察结果,网络安全产业对于人才的需求正以高速增长的趋势呈现,当前网络安全行业存在着巨大的人才缺口,平均供求比例约为1:2。这一现象导致了资深人才的储备不足,并且新人才的培…...

electron-builder打包
打包配置: "build": {"appId": "cc11001100.electron.example-001", // 程序包名"copyright": "CC11001100", // 版权相关信息"productName": "example-001", // 安装包文件名"direct…...

SQLiteC/C++接口详细介绍sqlite3_stmt类(四)
返回:SQLite—系列文章目录 上一篇:SQLiteC/C接口详细介绍sqlite3_stmt类(三) 下一篇:SQLiteC/C接口详细介绍sqlite3_stmt类(五) 7. sqlite3_bind_parameter_count函数 sqlite3_bind_param…...

微信小程序自定义组件
微信小程序中的自定义组件是指在微信小程序中创建的可重用的、可复用的组件,它可以被多个页面使用。自定义组件可以帮助我们提高开发效率,提高代码的可维护性和可重用性。以下是微信小程序中自定义组件的使用方法: 一. 创建自定义组件 首先…...

python练习3
用户登录注册案例 while True: print("\t\t\t英雄商城登录界面\n") print("~*"*38) print("\t\t\t1.用户登录\n") print("\t\t\t2.用户注册\n") print("\t\t\t3.退出系统\n") print("~*"*38) choice input("…...

docker离线安装并修改存储目录
docker下载 根据cpu选择不同版本,正常x86就选x86_64 下载地址:https://download.docker.com/linux/static/stable/ docker安装 tar -zxvf arm-docker-25.0.4.tgz sudo cp docker/* /usr/bin/ rm -rf docker/* mkdir /etc/docker vi /etc/docker/daemo…...
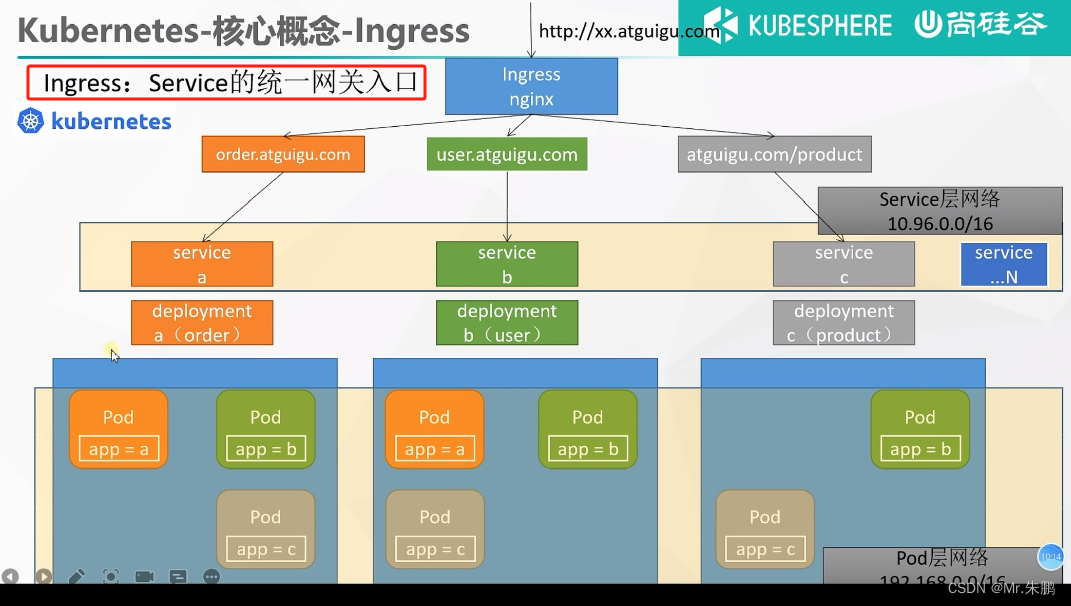
【云原生 • Kubernetes】认识 k8s、k8s 架构、核心实战
文章目录 Kubernetes基础概念1. 是什么2. 架构2.1 工作方式2.2 组件架构 3. k8s组件创建集群步骤一 基础环境步骤二 安装kubelet、kubeadm、kubectl步骤三 主节点使用kubeadm引导集群步骤四 副节点加入主节点步骤五 部署dashboard Kubernetes核心实战1. 资源创建方式2. Namespa…...

墨菲安全在软件供应链安全领域阶段性总结及思考
向外看:墨菲安全在软件供应链安全领域的一些洞察、思考、行动 洞察 现状&挑战: 过去开发安全体系是无法解决软件供应链安全问题的;一些过去专注开发安全领域的厂商正在错误的引导行业用开发安全思维解决软件供应链安全问题,治…...

智慧公厕:卫生、便捷、安全的新时代厕所变革
在城市快速发展的背景下,公共厕所的建设和管理变得越来越重要。智慧公厕作为厕所变革的一项全新举措,通过建立公共厕所全面感知监测系统,以物联网、互联网、大数据、云计算、自动化控制技术为支撑,实现对公共厕所的智能化管理和运…...
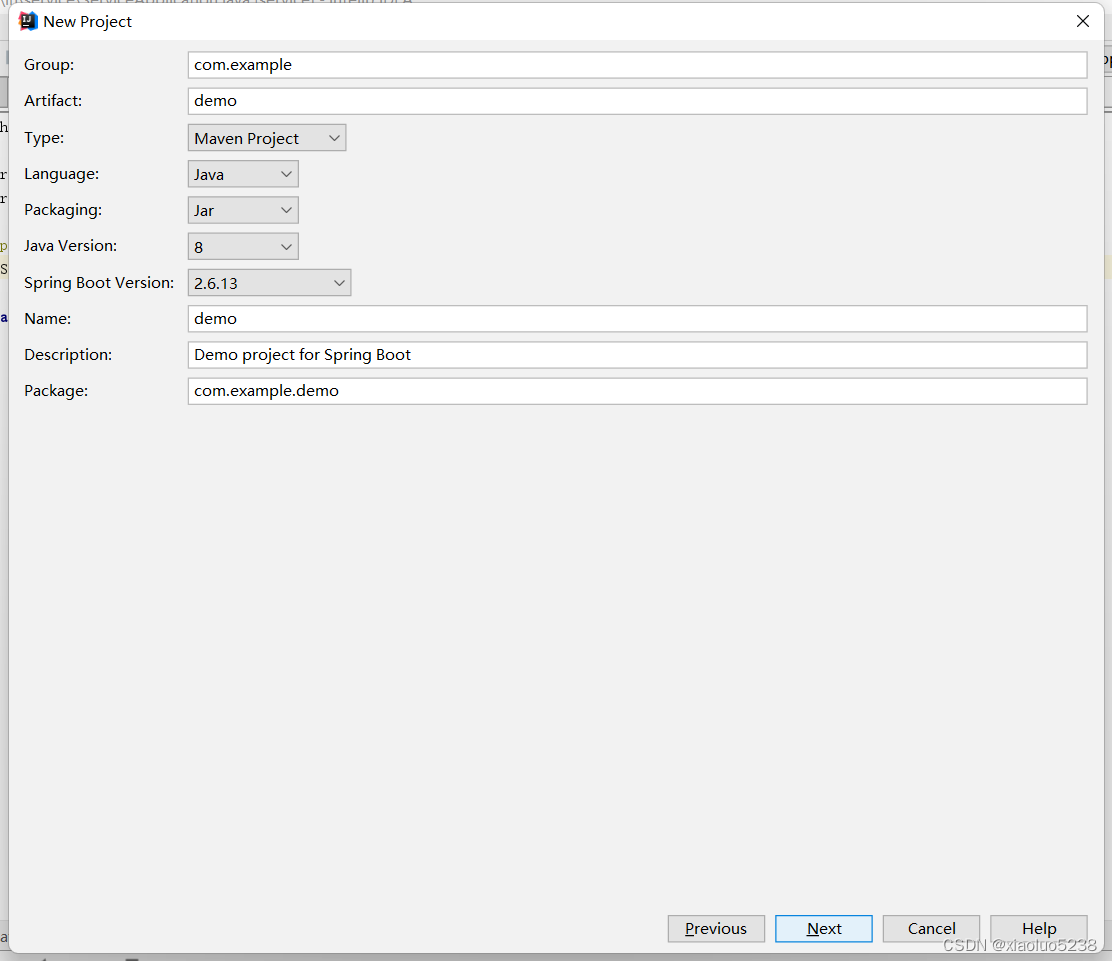
Idea 不能创建JDK1.8的spring boot项目
由于https://start.springboot.io/ 不支持JDK1.8,那么我们需要换idea的springboot创建源,需要换成 https://start.aliyun.com,这也是网上大部分教程说的,但是我这边会报这样的错误: Initialization failed for https:…...

【docker】Docker学习收集
写在前面 新公司开发使用docker来部署和统一大家的开发环境,故再次记录好用的学习链接和自己遇到的奇怪问题 实用链接 Docker教程详细 常用命令 个例问题 Q: docker在终端多开,A终端的修改会影响B吗 A: 会...

混合求解器:用神经网络增强传统微分方程数值方法
1. 项目概述:当数值方法遇到机器学习在科学计算和工程仿真领域,求解常微分方程(ODE)和偏微分方程(PDE)是绕不开的核心任务。无论是模拟电路中的电流变化、预测天气系统的演变,还是分析机械结构的…...

Kerberos身份认证原理与企业级排错实战指南
1. 这不是“另一个登录框”,而是一套精密运转的身份验证齿轮系统很多人第一次听说 Kerberos,是在公司内网登录邮箱或访问内部系统时,看到那个带小盾牌图标的弹窗——“正在使用 Kerberos 协议进行身份验证”。于是下意识觉得:“哦…...

告别C盘战士!ArcGIS 10.6安装路径选择与磁盘空间优化全攻略
告别C盘战士!ArcGIS 10.6安装路径选择与磁盘空间优化全攻略当GIS初学者第一次安装ArcGIS 10.6时,往往会被其庞大的安装体积所震惊。许多用户习惯性地点击"下一步",结果发现C盘空间被迅速吞噬,系统运行变得迟缓。本文将深…...

智慧树自动刷课助手:3步告别手动操作的学习效率工具
智慧树自动刷课助手:3步告别手动操作的学习效率工具 【免费下载链接】zhihuishu 智慧树刷课插件,自动播放下一集、1.5倍速度、无声 项目地址: https://gitcode.com/gh_mirrors/zh/zhihuishu 还在为智慧树平台的重复刷课操作而烦恼吗?智…...

【深度解析】AI Coding 模型竞速:从 Claude Mythos 安全编码到 GPT-5.6 传闻,如何落地代码审查智能体
摘要 AI 编码模型正在从“代码补全”进入“复杂代码库理解、漏洞发现与自动修复”阶段。本文结合 Claude Mythos、Claude Opus 4.8 与 GPT-5.6 相关信息,解析新一代 Coding Agent 的技术趋势,并给出基于大模型 API 的代码安全审查实战方案。背景介绍&…...

skills CANN开源社区贡献技能包开发指南
前言 开源社区的健康运转,不仅依赖核心代码的贡献,还需要降低贡献门槛、提供清晰的指南和自动化工具。skills仓库是CANN开源社区的"贡献技能包",提供了一系列辅助脚本、代码模板、CI检查和文档生成工具,帮助新手快速上…...

氘可来昔替尼常见副作用为鼻咽炎头痛及腹泻,如何应对
任何口服药物的临床价值,都必须在疗效与安全性的天平上找到精准的平衡点。氘可来昔替尼以PASI 75应答率的全面胜出证明了自己在银屑病治疗中的卓越地位,而其不良反应谱同样经过了严苛的临床验证。鼻咽炎、头痛和腹泻构成了这款药物最需关注的三大安全信号…...

终极指南:用D2DX让《暗黑破坏神2》在现代电脑上焕发新生
终极指南:用D2DX让《暗黑破坏神2》在现代电脑上焕发新生 【免费下载链接】d2dx D2DX is a complete solution to make Diablo II run well on modern PCs, with high fps and better resolutions. 项目地址: https://gitcode.com/gh_mirrors/d2/d2dx 还在为经…...

BetterJoy终极指南:3分钟让你的Switch手柄变身PC游戏神器
BetterJoy终极指南:3分钟让你的Switch手柄变身PC游戏神器 【免费下载链接】BetterJoy Allows the Nintendo Switch Pro Controller, Joycons and SNES controller to be used with CEMU, Citra, Dolphin, Yuzu and as generic XInput 项目地址: https://gitcode.c…...

Arduino ADC自检:用RC电路诊断模数转换器故障
1. 项目概述:当你的体重秤开始“说谎”你有没有遇到过这样的情况:站上家里的电子体重秤,屏幕上跳出来的数字让你瞬间怀疑人生?要么是轻得离谱,要么是重得吓人,更诡异的是,它可能只在两个固定的、…...