【阅读笔记】Adaptive GPS/INS integration for relative navigation
Lee J Y, Kim H S, Choi K H, et al. Adaptive GPS/INS integration for relative navigation[J]. Gps Solutions, 2016, 20: 63-75.
用于相对导航的自适应GPS/INS集成
名词翻译
formation flying:编队飞行
摘要翻译
在编队飞行、防撞、协同定位和事故监测等许多应用中,都需要基于GPS接收机和惯性测量单元的相对导航。由于传感器安装在独立移动的不同车辆上,因此由于不同的车辆动力学和信号环境,相对导航中的传感器误差比单车辆导航中的更大。为了提高相对导航中对传感器误差变化的鲁棒性,提出了一种有效的自适应GPS/INS集成方法。在所提出的方法中,通过两个基本不同的滤波器的创新分别估计GPS和惯性测量的协方差。一种是位置域载波平滑码滤波器,另一种是速度辅助卡尔曼滤波器。通过所提出的双滤波器自适应估计方法,由于每个滤波器估计自己的测量噪声,因此可以有效地隔离两个传感器的协方差估计。仿真和实验结果表明,该方法通过适当的噪声协方差估计提高了相对导航精度。
关键词
GPS/INS integration;Relative navigation;Adaptive estimation;CSC(carrier-smoothed-code) filtering
GPS/INS集成;相对导航;自适应估计;CSC(载波平滑码)滤波
Introduction
相对导航运用场景:编队飞行、车对车冲突避免、协同定位和事故监测。
GPS与INS:松耦合(LC)和紧耦合(TC)。
• LC与TC:详见本页Configuration of relative GPS/INS integrationGPS/INS相对集成配置
阿隆索等人(2000)提出了一种利用多视线(LOS)矢量来估计编队中多颗卫星之间的相对位置和速度的方法。Bever等人(2002)比较了三种相对导航方法的特点;仪表系统中的独立分离测量系统、编队针和编队飞行。
由于传感器安装在独立移动的不同物体上,因此由于不同的动力学和信号环境,相对导航中的传感器误差比传统的单体导航中的更大。因此,提高精度的一个关键因素是可变误差特性的处理。为了解决这个问题,自适应估计方法传统上被用于在存在时变误差的情况下提高估计精度[Magill D (1965) Optimal adaptive estimation of sampled stochastic processes. IEEE Trans Autom Control 10(4):434–439][Mehra R (1970) On the identification of variances and adaptive Kalman filtering. IEEE Trans Autom Control 15(2):175–184][Mehra R (1971) On-line identification of linear dynamic systems with applications to Kalman filtering. IEEE Trans Autom Control 16(1):12–21]。
Relative inertial navigation algorithm 相对惯导算法
两个物体的INS干扰来源有差异,所以INS算出来的位姿作差后,误差会更大。
设主动物体的框架(master-frame)和从动物体框架框架(slave-frame),主动到从动的坐标系转换为C_m^s,角速度和比例变换矩阵为:
Configuration of relative GPS/INS integrationGPS/INS相对集成配置
与LC方法相比,TC积分利用原始GPS测量值。由于利用了原始测量,能避免级联滤波问题。但TC在可见的卫星数量较多时,滤波状态量也变多,计算量很大。
Park等人[Lee JY, Kim HS, Choi KH, Park JD, Kim MW, Lee HK (2011) A study of covariance estimation to apply carrier-smoothed-code filter in GNSS. In: Proceeding of the international science and technology conference, pp 7–9]提出了一种双滤波器GPS/INS集成方法。基于两个滤波器的GPS/INS集成配置如图:
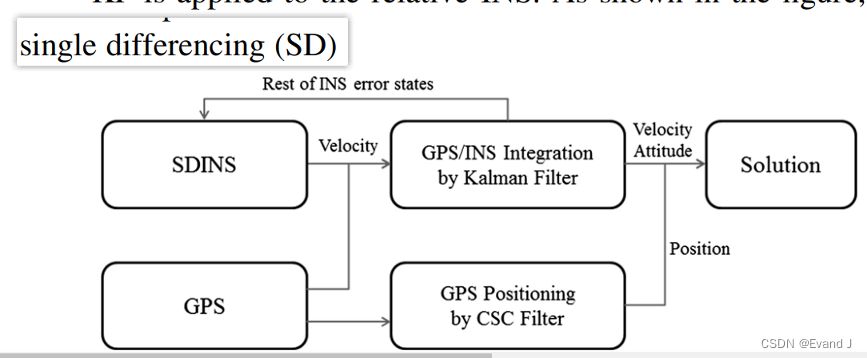
图中CSCF估计准确位置,KF估计剩余INS误差状态。
• CSCF在获得厘米级精度的相对位置方面具有优势,KF可以提供高速速度和精确输出。
• 可以通过组合CSCF提供的位置和KF提供的速度来获得高速相对位置。
由于KF利用由载波相位测量而不是预滤波器形成的精确GPS速度,所以在所提出的方法中不会出现级联滤波问题,因为原始测量被用作每个滤波器的输入。
自适应GPS/INS积分方法还实现了两种异构滤波器,即自适应单差分(SD)位置域(PD)CSCF和自适应GPS/INS-KF。所提出的自适应方法的架构如下图所示:
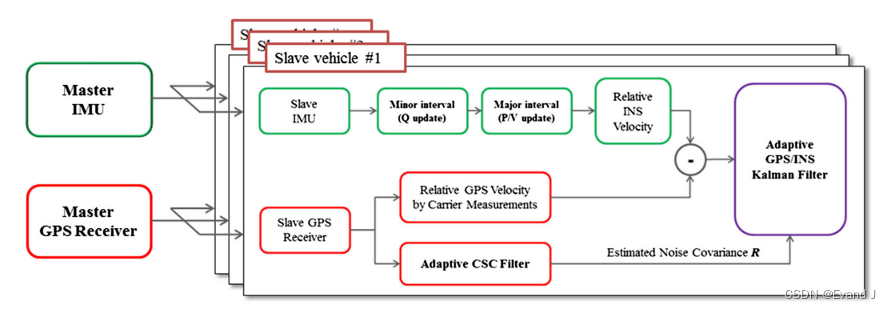
其中自适应SD PD CSCF应用于GPS测量,自适应GPS/INS KF应用于相对INS。
• 相对惯性测量值被用作相对INS算法的输入,以获得高输出速率下的相对姿态和速度。
• GPS测量值被用作自适应SD PD CSCF的输入,用于相对定位。
此外,利用GPS载波相位测量来计算GPS相对速度。最后,将相对速度和估计的噪声协方差用作自适应KF的输入,以获得准确的相对速度和姿态。
Adaptive estimation methods 自适应估计方法
CSCF
CSCF解释如下:Hatch[Hatch R (1983) The synergism of GPS code and carrier measurements. In: Proceeding of the international geodetic symposium on satellite doppler positioning, pp 1213–1231]提出了CSC滤波方法(Hatch滤波器),用于高精度GPS应用。
知乎的解释:伪距精度不如载波相位高,但是伪距可以实现绝对定位,而载波相位有一个未知的周整模糊度,无法实现绝对定位。因此,一个自然的想法时把两者结合起来,能不能得到更精确的测量值。
一种最为常见的结合方法是:载波平滑伪距 Carrier-smoothed-code(CSC)。
CSC算法可以减轻计算负担并减少所需的通信带宽传输GPS观察。 因此,众多不同CSC算法已为运动GPS所设计出来。 在所有现有CSC算法中,Hatch Filter 是最着名的,最简单的过滤器方案。 但是,对于双频GPS数据并不能得到一个最优的效果。
优点:与卡尔曼滤波相比,CSCF不需要状态转移方程。它利用高精度载波相位测量来计算两个连续时刻之间的增量位置。
由于CSCF不使用任何动力学模型,载波相位测量噪声成为时间传播的主要误差源。因此,CSC滤波中的精确时间传播需要载波相位测量的精确协方差估计。
KF
不再赘述:
Simulation and experiment
位置误差
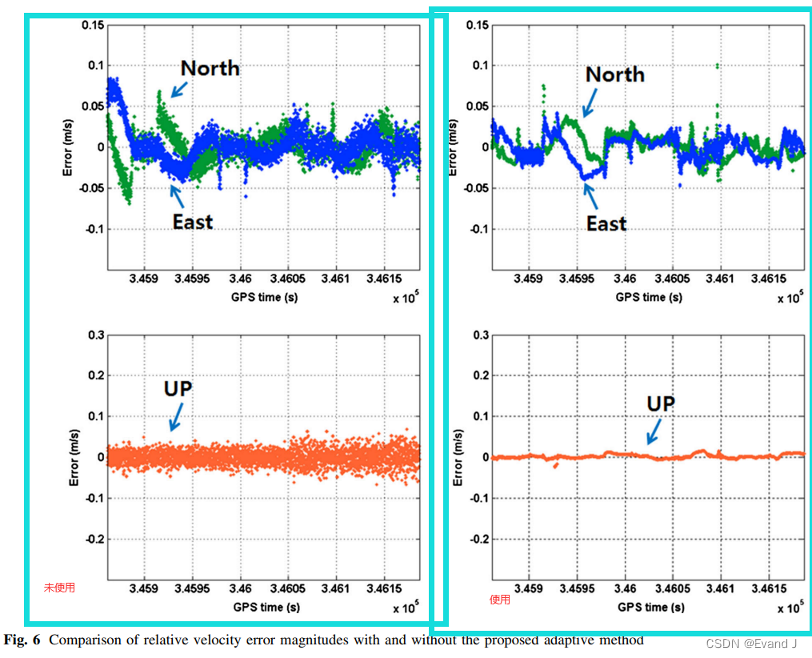
与没有使用自适应滤波的传统方法相比,使用所提出的自适应方法时,生成了更准确的相对速度估计。尤其:垂直方向的精度比水平方向的精度提高得多:
姿态误差
与位置差不多。
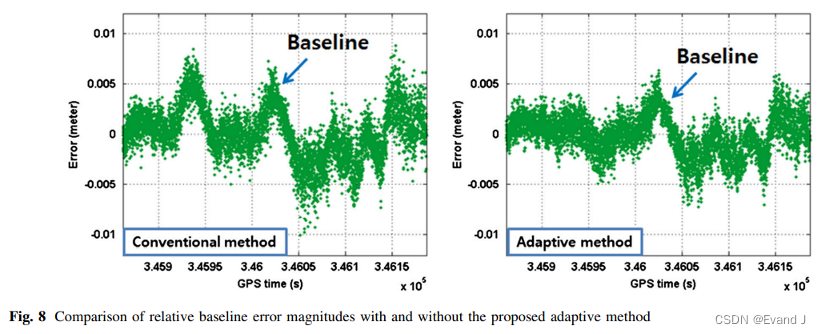
相对基线误差
相对基线:
实验部分略,有需要再添加。
Conclusions
针对自适应相对导航,提出了一种有效的GPS/INS组合方法。
两个基本不同的滤波器(自适应SD PD CSCF、自适应速度辅助GPS/INS KF)避免了级联滤波问题。
• 自适应SD PD CSCF利用载波相位和伪距测量的噪声协方差估计生成GPS位置。
• 自适应KF利用惯性传感器的噪声协方差估计以高输出速率生成准确的相对速度和姿态信息。
仿真和实验结果表明:适当的噪声协方差估计提高了导航解的精度。
进一步:需要通过更多的现场实验来开发多星座GNSS的协方差估计技术。
思路+绘图+句式
思路
GPS和INS相结合时,除了传统的KF,还可以考虑GPS自身使用CSCF,甚至像本文一样再将两个滤波结合起来。
算法验证部分:仿真+实验(Simulation and experiment )
绘图
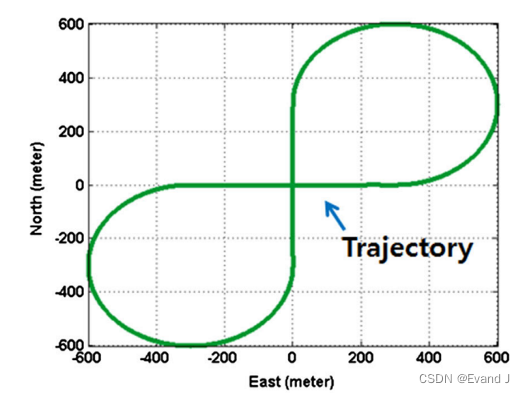
轨迹:
句式
基线:the baseline between GPS antennas(天线), and the relative velocity generated for the simulation.
相关文章:
【阅读笔记】Adaptive GPS/INS integration for relative navigation
Lee J Y, Kim H S, Choi K H, et al. Adaptive GPS/INS integration for relative navigation[J]. Gps Solutions, 2016, 20: 63-75. 用于相对导航的自适应GPS/INS集成 名词翻译 formation flying:编队飞行 摘要翻译 在编队飞行、防撞、协同定位和事故监测等许多…...
Java版直播商城免 费 搭 建:电商、小程序、三级分销及免 费 搭 建,平台规划与营销策略全掌握
随着互联网的快速发展,越来越多的企业开始注重数字化转型,以提升自身的竞争力和运营效率。在这个背景下,鸿鹄云商SAAS云产品应运而生,为企业提供了一种简单、高效、安全的数字化解决方案。 鸿鹄云商SAAS云产品是一种基于云计算的软…...

经典Bug永流传---每周一“虫”(四十五)
如果有人错过机会,多半不是机会没来,而是因为机会过来时,没有一伸手抓住它。 大写W惹的祸 前提: A账号已登录 步骤: 打开某商品链接,然后在商品的评论区任意一条评论,点击回复,回…...

蓝桥杯-礼物-二分查找
题目 思路 --刚开始想到暴力尝试的方法,但是N太大了,第一个测试点都超时。题目中说前k个石头的和还有后k个石头的和要小于s,在这里要能想到开一个数组来求前n个石头的总重,然后求前k个的直接将sum[i]-sum[i-k-1]就行了࿰…...

设计原则、工厂、单例模式
什么是设计模式 简单来说,设计模式就是很多程序员经过相当长的一段时间的代码实践、踩坑所总结出来的一套解决方案,这个解决方案能让我们少写一些屎山代码,能让我们写出来的代码写出来更加优雅,更加可靠。所以设计模式的好处是显而…...

笔记:Mysql 主从搭建
主库 创建用户并授权 create user slave identified with mysql_native_password by 123456 GRANT REPLICATION SLAVE ON *.* to slave%; FLUSH PRIVILEGES;主库配置文件 /etc/my.cnf #日志路径及文件名,目录要是mysql有权限写入 log-bin/var/lib/mysql/binlog …...

HTTP Error 400. The request hostname is invalid.
异常信息 <!DOCTYPE HTML PUBLIC "-//W3C//DTD HTML 4.01//EN""http://www.w3.org/TR/html4/strict.dtd"> <HTML><HEAD><TITLE>Bad Request</TITLE> <META HTTP-EQUIV"Content-Type" Content"text/html;…...
)
mysql日志( Redo Log 、Undo Log、Bin Log)
InnoDB是一个带有ACID事务支持的存储引擎,其中redo log和undo log是其实现原子性、一致性、隔离性和持久性(ACID)的重要机制。 Redo Log(重做日志) Redo log主要用于实现事务的持久性。它记录了后续可以用来恢复数据…...
HarmonyOS如何创建及调用三方库
介绍 本篇主要向开发者展示了在Stage模型中,如何调用已经上架到三方库中心的社区库和项目内创建的本地库。效果图如下: 相关概念 Navigation:一般作为Page页面的根容器,通过属性设置来展示页面的标题、工具栏、菜单。Tabs&#…...

我手写的轮子开源了
我手写的轮子开源了 文章目录 1.gitee坐标和地址1.1.gitee坐标1.2.gitee地址 2.github坐标和地址2.1.github坐标2.2.github地址 3.总结 1.gitee坐标和地址 1.1.gitee坐标 <dependency><groupId>io.gitee.bigbigfeifei</groupId><artifactId>es-sprin…...
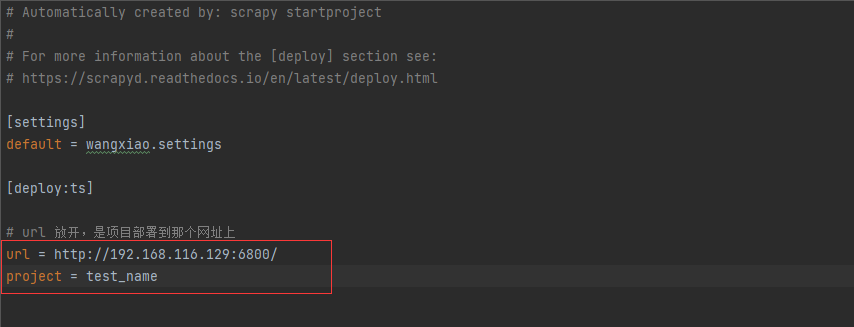
第十九章 linux部署scrapyd
文章目录 1. linux部署python环境1. 部署python源文件环境2. 下载python3. 解压安装包4. 安装5. 配置环境变量6. 检查是否安装成功7. 准备python使用的包8. 安装scrapyd9. 配置scrapyd10. 开放6800端口 2. 部署gerapy1. 本机下载包2. 初始化3. 进入gerapy同步数据库4. 创建用户…...

微信打卡小程序怎么做_用户的每日习惯培养神器
微信打卡小程序:你的每日习惯培养神器 在这个快节奏的现代社会,我们每天都在忙碌中度过,有时候甚至会忘记自己曾经立下的那些小目标、小习惯。然而,随着科技的不断发展,微信打卡小程序的出现,为我们的生活…...
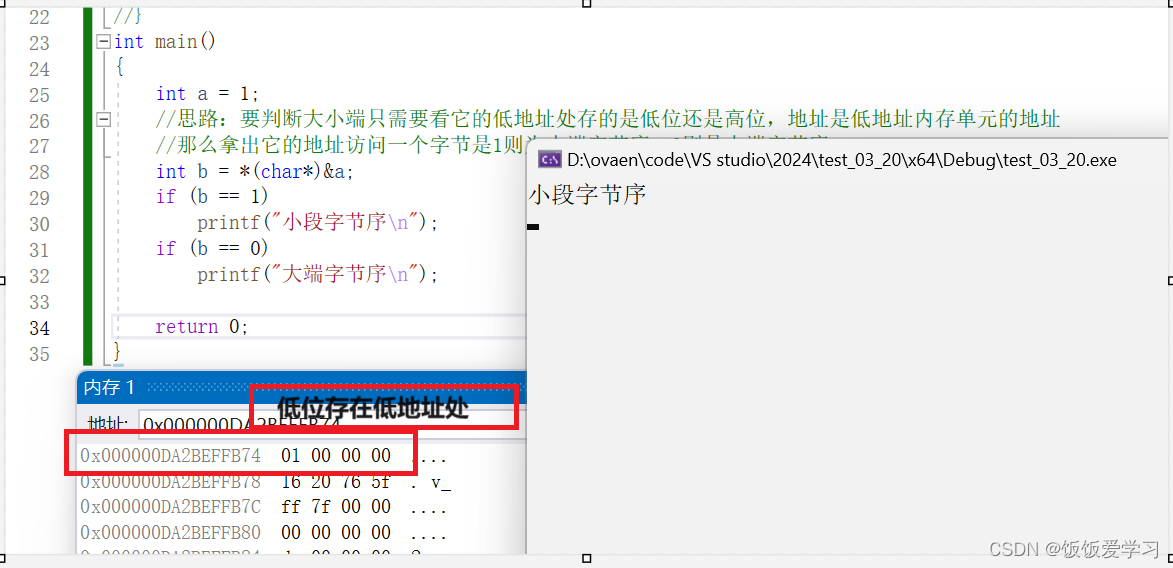
C语言数据在内存中的存储
reference n.提及,谈到;参考,查阅;(引自书或诗歌的)引言,引文; 引文的作者,参考书目;(帮助或意见的)征求,征询;…...

管理公司员工上网行为的软件都有哪些?
随着互联网的飞速发展,企业面临的网络安全威胁也日益加剧。为了保护企业数据安全、提高工作效率,上网行为管理系统及其相关管理软件应运而生。 未来,随着技术的不断进步和网络安全威胁的不断演变,上网行为管理系统及其管理软件将不…...

手撕C语言题典——逆序输出
有这样一个问题:读入一些整数,逆序输出到一行中。已知的是该整数不超过100个。我们该怎么办呢?我们先将这些整数循环输入,输入每个整数之后,我们只能将数组存下来,而这个地方就是数组。 本章可能用到的知识…...

如果保障服务器的安全
如果保障服务器的安全 一、修改它最开始的密码,后期也要一直更换。一般如果有客户来了服务器的话,服务器厂商都会提前把所有的系统都装好,之后再把这个权限交到用户的手里。很多用户可能在这方面不会特别注意,密码也不修改&#x…...
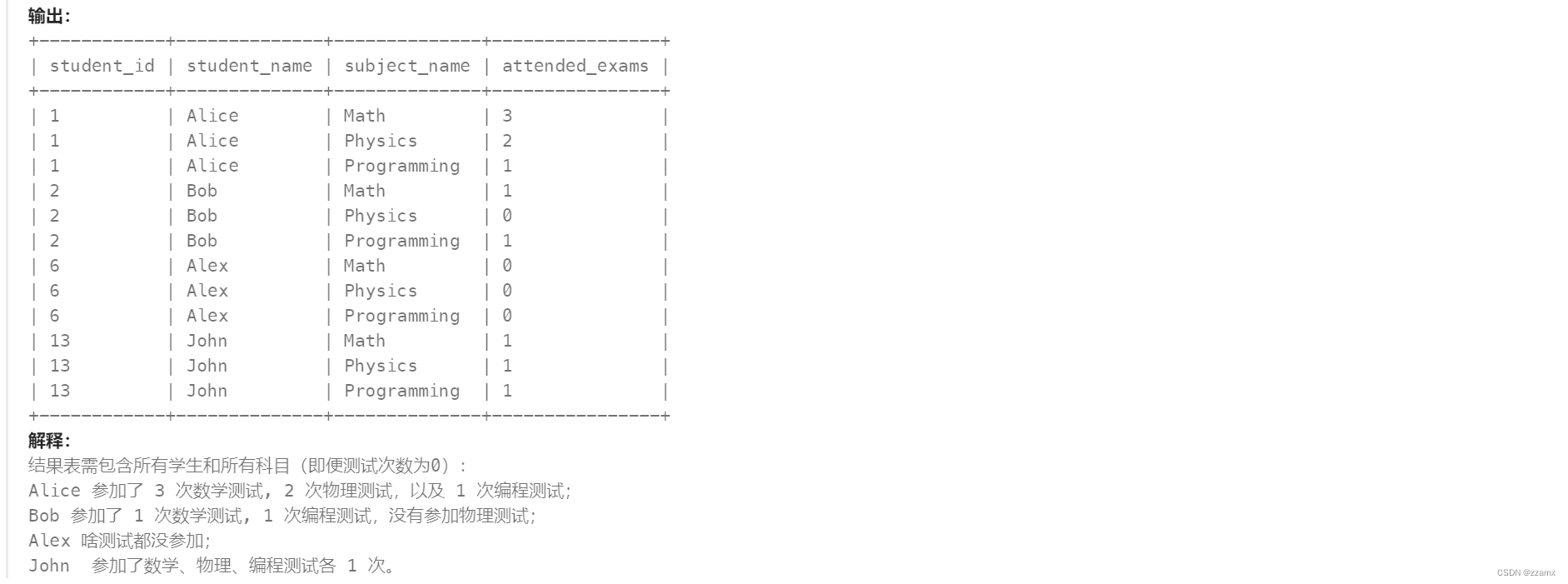
【SQL】1280. 学生们参加各科测试的次数 (笛卡尔积)
前述 知识点回顾:数据库中的四大join & 笛卡尔乘积(以MySQL为例) 笛卡尔积的两种写法 select * from stu,class; select * from stu cross join class; 题目描述 leetcode题目:1280. 学生们参加各科测试的次数 Code 写法…...

高企认定中科技成果转化是什么呢?
其实,这是一个流程,可以用下面的分段进程来表示:企业开展科研立项—科研立项得到科研结果—科研结果用于产品的生产—新产品品质提高带动了销售的增加。 上面的流程,其实是高企审核的核心,不仅仅关系到了量化打分。更…...
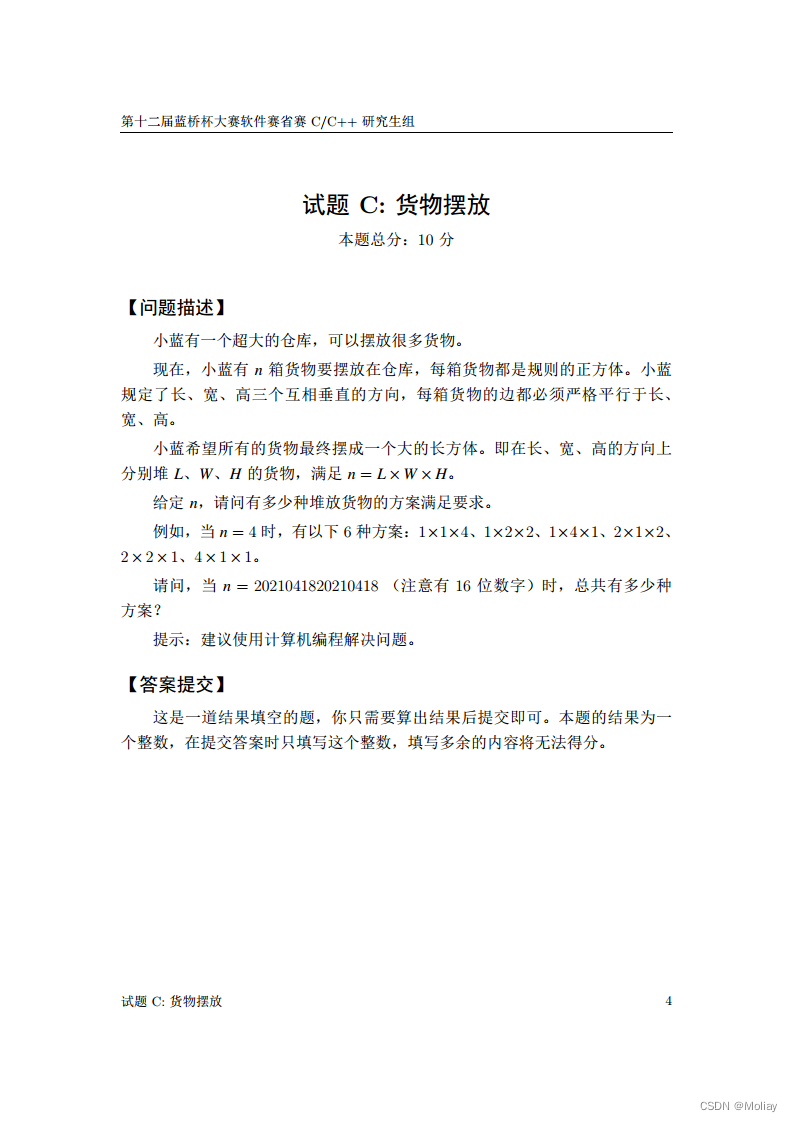
第十二届蓝桥杯省赛CC++ 研究生组-货物摆放
还是整数分解问题,注意n本身也是约数 #include <iostream> int main(){printf("2430");return 0; }#include <iostream> #include<cmath> #include<algorithm> using namespace std; typedef long long ll; const ll n 2021041820210418LL…...
基于SpringBoot的学生成绩管理系统
基于SpringBootVue的家教管理系统的设计与实现~ 开发语言:Java 数据库:MySQL 技术:SpringBoot 系统功能结构展示 登录界面图 现今,越来越多的人乐于选择一项合适的管理方案,但是普通用户往往受到管理经验地限制&…...

Unity UGUI轻量UI框架:200行代码实现零GC界面管理
1. 为什么还要自己手写UI框架?——当UGUI原生方案开始“卡脖子”很多人看到这个标题第一反应是:“都2024年了,还手写UI框架?Asset Store里几十个成熟方案,NGUI、FairyGUI、TextMeshPro配套的UI系统一抓一大把ÿ…...

从理论推导到代码实现:手把手教你用Python/Numpy写出守恒形式的NS方程求解器
从理论推导到代码实现:手把手教你用Python/Numpy写出守恒形式的NS方程求解器计算流体力学(CFD)的魅力在于它将抽象的数学方程转化为可执行的代码,让流体运动的奥秘在计算机中重现。对于已经掌握流体力学理论的中高级学习者来说&am…...

Codex使用API Key授权无法使用插件?
小伙伴们,大家好,我是小溪,见字如面。对于没有ChatGPT账号的小伙伴来说,虽然可以通过API Key授权的方式使用Codex桌面端,但是会有一些限制。比如无法使用插件功能,无法使用Codex移动端进行远程控制等。为了…...

百度深度学习研究院的“叛将“,带着一颗芯片改变了中国智能驾驶——地平线余凯,从ImageNet冠军到征程出货1000万
大家好,我是写代码的篮球球痴。这篇文章跟我自己有点关系——我开的是理想汽车。理想的智驾系统 AD Pro,搭载的就是地平线征程 5 芯片。2026 年 1 月理想 AD Pro 4.0 推送,基于单颗征程 6M 实现了城市 NOA——这是行业里第一个用单颗 128TOPS…...

特定任务需求场景下的过约束并联机构构型设计与控制方法【附代码】
✨ 长期致力于曲面加工、构型综合、运动学和动力学建模、性能评价、多目标优化、滑模控制、鲁棒控制、视觉传感技术研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (…...

保姆级教程:在Ubuntu上配置Frida环境,搞定Android App的IO重定向与签名绕过
在Ubuntu上构建Android逆向工程环境:Frida实战与IO重定向技术解析 对于习惯Linux环境的安全研究人员而言,Windows-centric的逆向工具链往往带来诸多不便。本文将系统性地介绍如何在Ubuntu上搭建完整的Android逆向环境,并深入探讨如何利用Frid…...

万星easy-vibe:描述需求即发布 零基础无需学语法
开源Easy-Vibe是一套开源AI编程学习方案,把学习顺序从先学语法再做项目翻转为直接做项目。文章拆解了项目驱动、提示词编写、AI编辑器和多Agent协作的完整流程,解释了为什么想法比语法更重要。 github上datawhalechina/easy-vibe:它在GitHub…...

Autodesk Fusion 360在Linux上的技术实现与性能优化深度解析
Autodesk Fusion 360在Linux上的技术实现与性能优化深度解析 【免费下载链接】Autodesk-Fusion-360-for-Linux This is a project, where I give you a way to use Autodesk Fusion 360 on Linux! 项目地址: https://gitcode.com/gh_mirrors/au/Autodesk-Fusion-360-for-Linu…...

如何快速上手Redux Dynamic Modules:5分钟完成Redux模块化改造
如何快速上手Redux Dynamic Modules:5分钟完成Redux模块化改造 【免费下载链接】redux-dynamic-modules Modularize Redux by dynamically loading reducers and middlewares. 项目地址: https://gitcode.com/gh_mirrors/re/redux-dynamic-modules Redux Dyn…...

PrediPrune:机器学习驱动的编译器超级优化候选剪枝策略
1. 项目概述与核心挑战在编译器优化的世界里,我们总在追求极致的性能。传统的编译器优化器,比如LLVM的Pass,依赖于一系列预定义的、经过验证的转换规则。它们很高效,但想象力也受限于这些规则。超级优化器(Superoptimi…...