算法公式汇总
文章目录
- 三角函数
- 定义式
- 诱导公式
- 平方关系
- 两角和与差的三角函数
- 积化和差公式
- 和差化积公式
- 倍角公式
- 半角公式
- 万能公式
- 其他公式
- 反三角函数恒等式
- 三角函数
- 定义式
三角函数
定义式
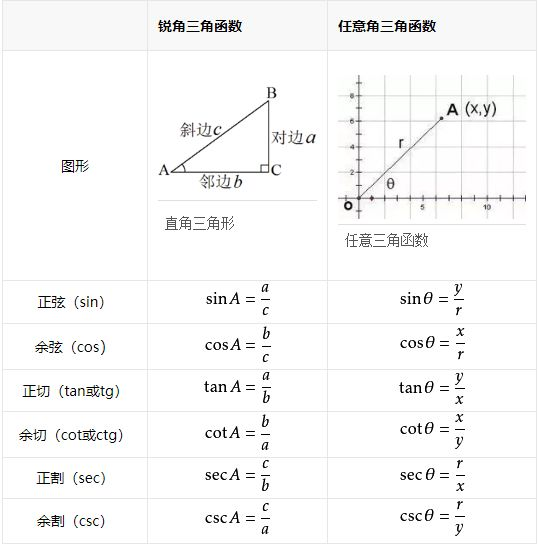
余切: c o t A = 1 t a n A \text { 余切:} \ cotA = \frac{1}{tanA} 余切: cotA=tanA1
正切: s e c A = 1 c o s A \text { 正切:} \ secA = \frac{1}{cosA} 正切: secA=cosA1
余割: c s c A = 1 s i n A \text { 余割:} \ cscA = \frac{1}{sinA} 余割: cscA=sinA1
反正切: a r c t a n ( t a n X ) = t a n ( a r c t a n X ) = X \text { 反正切:} \ arctan(tanX) = tan(arctanX) = X 反正切: arctan(tanX)=tan(arctanX)=X
诱导公式
- sin ( − α ) = − sin α
- cos ( − α ) = cos α
- sin ( π 2 − α ) = cos α
- cos ( π 2 − α ) = sin α
- sin ( π 2 + α ) = cos α
- cos ( π 2 + α ) = − sin α
- sin ( π − α ) = sin α
- cos ( π − α ) = − cos α
- sin ( π + α ) = − sin α
- cos ( π + α ) = − cos α
平方关系
1 + t a n 2 α = s e c 2 α 1 + tan^2α = sec^2α 1+tan2α=sec2α
1 + c o t 2 α = c s c 2 α 1 + cot^2α = csc^2α 1+cot2α=csc2α
s i n 2 α + c o s 2 α = 1 sin^2α + cos^2α = 1 sin2α+cos2α=1
两角和与差的三角函数
s i n ( α + β ) = s i n α c o s β + c o s α s i n β sin ( α + β ) = sin α cos β + cos α sin β sin(α+β)=sinαcosβ+cosαsinβ
c o s ( α + β ) = c o s α c o s β − s i n α s i n β cos ( α + β ) = cos α cos β − sin α sin β cos(α+β)=cosαcosβ−sinαsinβ
s i n ( α − β ) = s i n α c o s β − c o s α s i n β sin ( α − β ) = sin α cos β − cos α sin β sin(α−β)=sinαcosβ−cosαsinβ
c o s ( α − β ) = c o s α c o s β + s i n α s i n β cos ( α − β ) = cos α cos β + sin α sin β cos(α−β)=cosαcosβ+sinαsinβ
t a n ( α + β ) = t a n α + t a n β 1 − t a n α t a n β tan ( α + β ) = \frac{ tan α + tan β}{1 - tan α tan β} tan(α+β)=1−tanαtanβtanα+tanβ
t a n ( α − β ) = t a n α − t a n β 1 + t a n α t a n β tan ( α − β ) = \frac{ tan α - tan β}{1 + tan α tan β} tan(α−β)=1+tanαtanβtanα−tanβ
积化和差公式
c o s α c o s β = 1 2 [ c o s ( α + β ) + c o s ( α − β ) ] cos α cos β = \frac{1}{2} [ cos ( α + β ) + c o s ( α − β ) ] cosαcosβ=21[cos(α+β)+cos(α−β)]
c o s α s i n β = 1 2 [ s i n ( α + β ) − s i n ( α − β ) ] cos α sin β = \frac{1}{2} [ sin ( α + β ) - sin ( α − β ) ] cosαsinβ=21[sin(α+β)−sin(α−β)]
s i n α c o s β = 1 2 [ s i n ( α + β ) + s i n ( α − β ) ] sin α cos β = \frac{1}{2} [ sin ( α + β ) + sin ( α − β ) ] sinαcosβ=21[sin(α+β)+sin(α−β)]
s i n α s i n β = − 1 2 [ c o s ( α + β ) + c o s ( α − β ) ] sin α sin β = -\frac{1}{2} [ cos ( α + β ) + c o s ( α − β ) ] sinαsinβ=−21[cos(α+β)+cos(α−β)]
和差化积公式
s i n α + s i n β = 2 s i n α + β 2 c o s α − β 2 sin α + sin β = 2 sin \frac{α + β}{2} cos \frac{α - β}{2} sinα+sinβ=2sin2α+βcos2α−β
s i n α − s i n β = 2 c o s α + β 2 s i n α − β 2 sin α - sin β = 2 cos \frac{α + β}{2} sin \frac{α - β}{2} sinα−sinβ=2cos2α+βsin2α−β
c o s α + c o s β = 2 c o s α + β 2 c o s α − β 2 cos α + cos β = 2 cos \frac{α + β}{2} cos \frac{α - β}{2} cosα+cosβ=2cos2α+βcos2α−β
c o s α − c o s β = − 2 s i n α + β 2 s i n α − β 2 cos α - cos β = -2 sin \frac{α + β}{2} sin \frac{α - β}{2} cosα−cosβ=−2sin2α+βsin2α−β
倍角公式
s i n 2 α = 2 s i n α c o s α sin 2 α = 2 sin α cos α sin2α=2sinαcosα
c o s 2 α = c o s 2 α − s i n 2 α = 1 − 2 s i n 2 α = 2 c o s 2 α − 1 cos 2 α = cos ^2 α − sin ^2 α = 1 − 2 sin ^2 α = 2 cos ^2 α − 1 cos2α=cos2α−sin2α=1−2sin2α=2cos2α−1
s i n 3 α = − 4 s i n 3 α + 3 s i n α sin 3 α = − 4 sin ^3 α + 3 sin α sin3α=−4sin3α+3sinα
c o s 3 α = 4 c o s 3 α − 3 c o s α cos 3 α = 4 cos ^3 α − 3 cos α cos3α=4cos3α−3cosα
s i n 2 α = 1 − c o s 2 α 2 sin ^2 α = \frac{1 − cos 2 α}{2} sin2α=21−cos2α
c o s 2 α = 1 + c o s 2 α 2 cos ^2 α = \frac{1 + cos 2 α}{2} cos2α=21+cos2α
t a n 2 α = 2 t a n α 1 − t a n 2 α tan 2 α = \frac{2 tan α}{1 − tan ^2 α } tan2α=1−tan2α2tanα
c o t 2 α = c o t 2 α − 1 2 c o t α cot 2 α = \frac{cot ^2 α − 1}{2 cot α} cot2α=2cotαcot2α−1
半角公式
s i n 2 α 2 = 1 − c o s α 2 sin ^2 \frac{α}{2} = \frac{1 − cos α}{2} sin22α=21−cosα
c o s 2 α 2 = 1 + c o s α 2 cos ^2 \frac{α}{2} = \frac{1 + cos α}{2} cos22α=21+cosα
s i n α 2 = ± 1 − c o s α 2 sin \frac{α}{2} = ±\sqrt{\frac{1 - cos α}{2}} sin2α=±21−cosα
c o s α 2 = ± 1 + c o s α 2 cos \frac{α}{2} = ±\sqrt{\frac{1 + cos α}{2}} cos2α=±21+cosα
t a n α 2 = 1 − c o s α s i n α = s i n α 1 + c o s α = ± 1 − c o s α 1 + c o s α tan \frac{α}{2} = \frac{1 - cos α}{sin α} = \frac{sin α}{1 + cos α } = ±\sqrt{\frac{1 - cos α}{1 + cos α}} tan2α=sinα1−cosα=1+cosαsinα=±1+cosα1−cosα
c o t α 2 = s i n α 1 − c o s α = 1 + c o s α s i n α = ± 1 + c o s α 1 − c o s α cot \frac{α}{2} = \frac{sin α}{1 - cos α} = \frac{1 + cos α }{sin α } = ±\sqrt{\frac{1 + cos α}{1 - cos α}} cot2α=1−cosαsinα=sinα1+cosα=±1−cosα1+cosα
万能公式
s i n α = 2 t a n α 2 1 + t a n 2 α 2 sin α = \frac{2tan \frac{α}{2}}{1 + tan ^2 \frac{α}{2}} sinα=1+tan22α2tan2α
c o s α = 1 − t a n 2 α 2 1 + t a n 2 α 2 cos α = \frac{1 - tan ^2 \frac{α}{2}}{1 + tan ^2 \frac{α}{2}} cosα=1+tan22α1−tan22α
其他公式
1 + s i n α = ( s i n α 2 + c o s α 2 ) 2 1 + sin α = ( sin \frac{α}{2} + cos \frac{α}{2}) ^2 1+sinα=(sin2α+cos2α)2
1 − s i n α = ( s i n α 2 − c o s α 2 ) 2 1 - sin α = ( sin \frac{α}{2} - cos \frac{α}{2}) ^2 1−sinα=(sin2α−cos2α)2
反三角函数恒等式
a r c s i n x + a r c c o s x = π 2 arcsin x + arccos x = \frac{π}{2} arcsinx+arccosx=2π
a r c t a n x + a r c c o t x = π 2 arctan x + arccot x = \frac{π}{2} arctanx+arccotx=2π
s i n ( a r c c o s x ) = 1 − x 2 sin ( arccos x ) = \sqrt{1 − x ^2} sin(arccosx)=1−x2
c o s ( a r c s i n x ) = 1 − x 2 cos ( arcsin x ) = \sqrt{1 − x ^2} cos(arcsinx)=1−x2
s i n ( a r c s i n x ) = x sin ( arcsin x ) = x sin(arcsinx)=x
a r c s i n ( s i n x ) = x arcsin ( sin x ) = x arcsin(sinx)=x
c o s ( a r c c o s x ) = x cos ( arccos x ) = x cos(arccosx)=x
a r c c o s ( c o s x ) = x arccos ( cos x ) = x arccos(cosx)=x
a r c c o s ( − x ) = π − a r c c o s x arccos ( − x ) = π − arccos x arccos(−x)=π−arccosx
三角函数
定义式
相关文章:
算法公式汇总
文章目录 三角函数定义式诱导公式平方关系两角和与差的三角函数积化和差公式和差化积公式倍角公式半角公式万能公式其他公式反三角函数恒等式 三角函数定义式 三角函数 定义式 余切: c o t A 1 t a n A \text { 余切:} \ cotA \frac{1}{tanA} 余切&a…...

c语言管理课程信息系统
定制魏:QTWZPW,获取更多源码等 目录 题目要求 数据结构 函数设计 结构设计 管理员功能: 学生功能: 效果展示 总结 主函数代码 题目要求 管理课程信息系统,允许管理员和学生执行不同的操作。管理员可以添加、浏览、查询、删除、修改和排序课程信息。学生可以…...

大模型在天体物理学研究中的辅助作用与案例分析
大模型在天体物理学研究中的辅助作用与案例分析 1. 背景介绍 天体物理学是研究宇宙中各种天体的物理性质和运动规律的科学。随着观测技术的进步,天体物理学家们获得了大量的数据,这些数据往往具有高维度、非线性、非平稳等特点,给传统的数据…...

洛谷_P1873 [COCI 2011/2012 #5] EKO / 砍树_python写法
P1873 [COCI 2011/2012 #5] EKO / 砍树 - 洛谷 | 计算机科学教育新生态 (luogu.com.cn) n, m map(int,input().split())data list(map(int,input().split())) h 0 def check(mid):h 0for i in data:if i>mid:h (i-mid)if h < m:return Trueelse:return Falsel 0 r …...

Android_NDK调试
第一步: 链接log动态库 在Android.mk文件中添加 LOCAL_LDLIBS -llog 注意:一定要在 include $(BUILD_SHARED_LIBRARY) 之上添加,因为当执行到这句话的时候就表示所有的lib动态库已经加载完毕了,所以当你在这句代码之后再添加…...
)
全量知识系统 概要设计(SmartChat回复)
以下是根据我给出的 系统概要 “提要和纪要”,SmartChat给出的概要设计。我给出的“提要和纪要”可参考链接: https://blog.csdn.net/ChuanfangChen/article/details/136861822 -------------------------------- 概要设计文档 1. 简介 全量知识系统…...
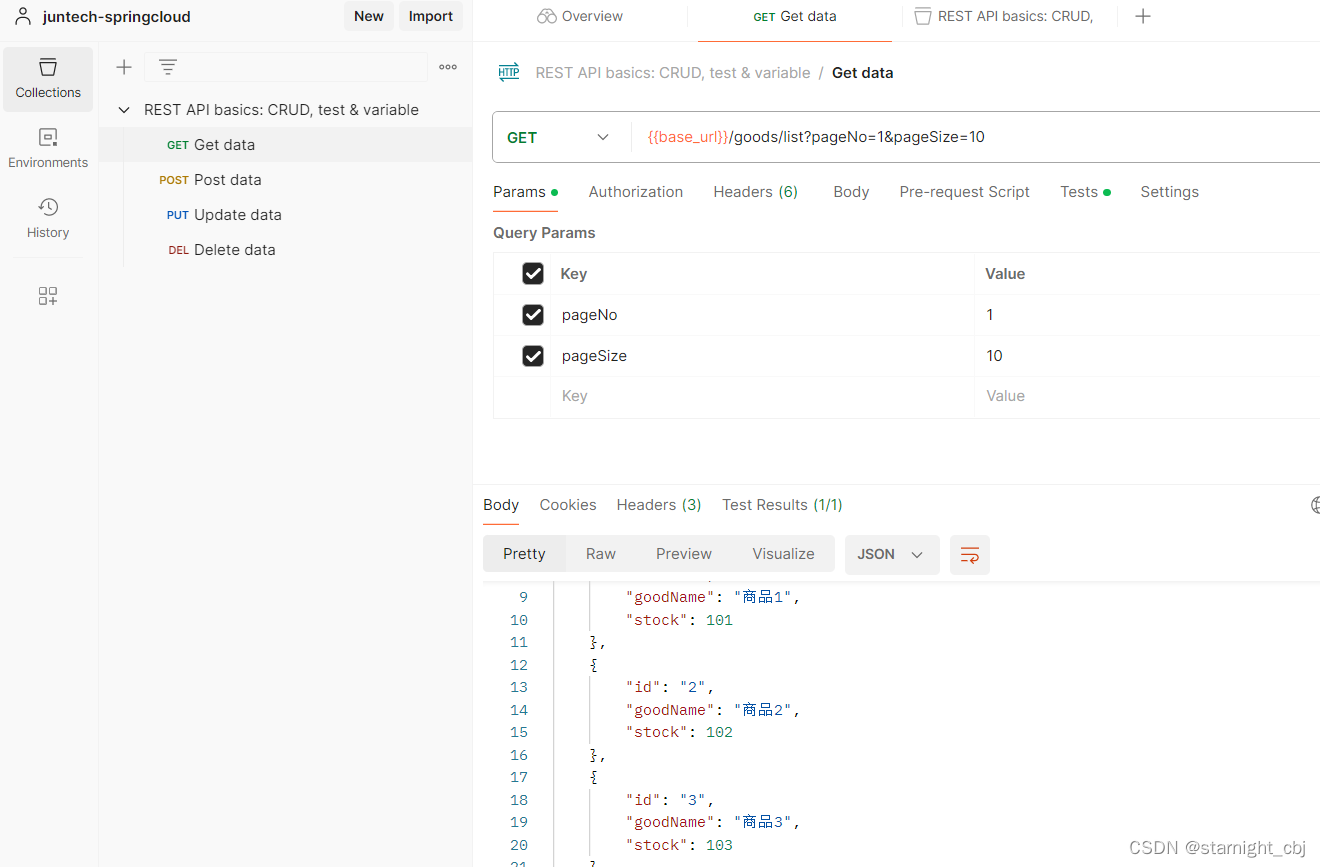
一、SpringBoot基础搭建
本教程主要给初学SpringBoot的开发者,通过idea搭建单体服务提供手把手教学例程,主要目的在于理解环境的搭建,以及maven模块之间的整合与调用 源码:jun/learn-springboot 以商城项目为搭建例子,首先计划建1个父模块&…...
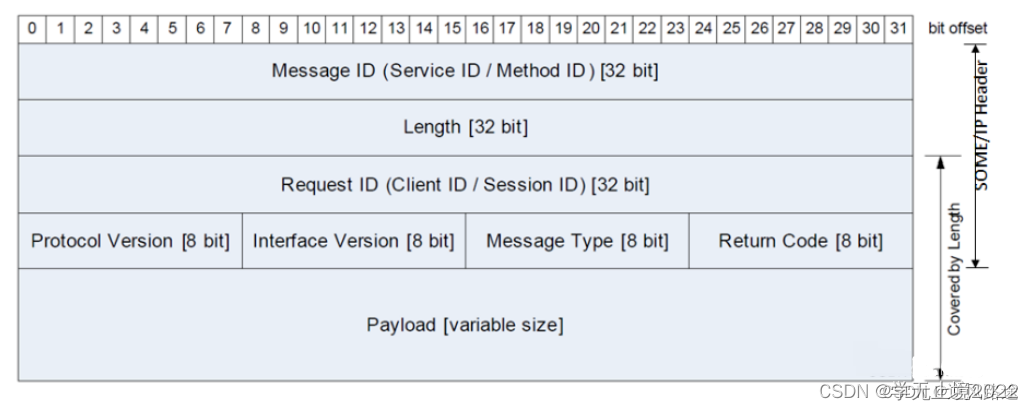
some/ip CAN CANFD
关于SOME/IP的理解 在CAN总线的车载网络中,通信过程是面向信号的 当ECU的信号的值发生了改变,或者发送周期到了,就会发送消息,而不考虑接收者是否需要,这样就会造成总线上出现不必要的信息,占用了带宽 …...

HTTP Header Fields
HTTP(超文本传输协议)中包含多种类型的头部字段(Header Fields),以下是常见的HTTP头部字段及其作用: ### 通用头字段(General Header Fields) - **Cache-Control**: 控制缓存行为&a…...
基于FPGA的FFT图像滤波设计
1.FFT滤波算法介绍 FFT滤波就是通过傅里叶运算将图像转换到频域空间,然后在频域中对图像进行处理,最后将处理后的图像通过傅里叶逆运算将图像转会到时域空间。 在频域空间中,我们能够更好的对图像的噪声进行分析,然后找出相关规律…...
WPF 立体Border
WPF 立体Border ,用来划分各个功能区块 在资源文件中,添加如下样式代码: <Style x:Key"BaseBorder" TargetType"Border"><Setter Property"Background" Value"White" /><Setter Prop…...

java.lang.ClassNotFoundException: kotlin.jvm.internal.Intrinsics
今天在使用springBoot连接influxdb报错 java.lang.ClassNotFoundException: kotlin.jvm.internal.Intrinsics 详细报错如下,提出我们缺少一个依赖 原因是由于创建influxdb客户端缺少Kotlin运行时库 解决办法就是 1.显示的添加okhttp的依赖 <dependency>…...
代码随想录(day8)——字符串
Leetcode.344 反转字符串: 344. 反转字符串 - 力扣(LeetCode) 原理过于简单,没什么好说的,直接给出代码: class Solution { public:void reverseString(vector<char>& s) {int end s.size()-1…...
JavaScript 权威指南第七版(GPT 重译)(二)
第四章:表达式和运算符 本章记录了 JavaScript 表达式以及构建许多这些表达式的运算符。表达式 是 JavaScript 的短语,可以 评估 以产生一个值。在程序中直接嵌入的常量是一种非常简单的表达式。变量名也是一个简单表达式,它评估为分配给该变…...
【python_往企业微信群中发送文件】
python_往企业微信群中发送文件 这个是用企业微信群机器人的功能,没有用到后台应用。群机器人 #-*- coding:utf-8-* import requests#类型:voice,file file_type"file" file_path"D:\desktop\不过.jpg" webhookkey"xxxx"#…...
)
华为校招机试 - 循环依赖(20240320)
题目描述 给定一组元素,及其依赖关系,一个元素可以依赖于多个元素(不包括自己,被依赖元素不会重复),一个元素也可被多个元素依赖。 假定总是存在唯一的循环依赖,请输出该循环依赖。 输入描述 第一行是个正整数 N (1 < N < 100),表示依赖关系的个数。 下面每…...
基于Spring Boot技术的幼儿园管理系统
摘 要 随着信息时代的来临,过去的传统管理方式缺点逐渐暴露,对过去的传统管理方式的缺点进行分析,采取计算机方式构建幼儿园管理系统。本文通过课题背景、课题目的及意义相关技术,提出了一种活动信息、课程信息、菜谱信息、通知公…...

查找众数及中位数 - 华为OD统一考试(C卷)
OD统一考试(C卷) 分值: 100分 题解: Java / Python / C++ 题目描述 众数是指一组数据中出现次数量多的那个数,众数可以是多个。 中位数只是指把一组数据从小到大排列,最中间的那个数,如果这组数据的个数是奇数,那最中间那个就是中位数,如果这组数据的个数为偶数,那…...

bash命令执行.sh文件 windows python环境
报错: bash : 无法将“bash”项识别为 cmdlet、函数、脚本文件或可运行程序的名称。请检查名称的拼写,如果包括路径,请确保路径正确,然后再试一次。 所在位置 行:1 字符: 1 ’ bash fetch_data.sh ‘ ~~~~ CategoryInfo : Object…...

refreactive vue3
ref 可以定义:基本类型、对象类型的响应式数据 reactive 只能定义:对象类型的响应式数据 <template><div class"person"><h2>Name: {{ name }}</h2><h2>Age: {{ age }}</h2><h2>Tel: {{ tel }}</h2><button cl…...

四旋翼变形控制:RL与MPC在混合动力学中的对比
1. 四旋翼变形控制的技术挑战与解决方案四旋翼变形控制(Quadrotor Morpho-Transition)是当前机器人领域最具挑战性的前沿技术之一。这项技术使机器人能够在空中完成形态变换,实现从飞行模式到地面模式的平滑切换。想象一下,一架四…...

Kerberos身份认证原理与企业级排错实战指南
1. 这不是“另一个登录框”,而是一套精密运转的身份验证齿轮系统很多人第一次听说 Kerberos,是在公司内网登录邮箱或访问内部系统时,看到那个带小盾牌图标的弹窗——“正在使用 Kerberos 协议进行身份验证”。于是下意识觉得:“哦…...

Taotoken的TokenPlan套餐如何实现更经济的模型调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的TokenPlan套餐如何实现更经济的模型调用 1. 理解TokenPlan的计费模式 在模型应用开发过程中,成本的可预测性…...
)
别再乱用npm install了!手把手教你用npx only-allow为项目指定包管理器(支持pnpm/yarn/npm)
用only-allow统一团队包管理器:从配置到CI的全流程指南 你是否曾经在拉取一个新项目后,面对npm install、yarn还是pnpm i的抉择感到困惑?或者更糟的是,团队成员混用不同包管理器导致node_modules结构不一致,引发各种诡…...

AArch64内存管理:MAIR_EL3寄存器详解与应用
1. AArch64内存管理基础与MAIR_EL3寄存器定位 在Armv8-A/v9-A架构中,内存管理单元(MMU)通过多级页表实现虚拟地址到物理地址的转换。当处理器执行内存访问时,MMU会遍历页表条目(Translation Table Entry),其中包含两个关键信息:目…...

内网环境下Win7系统批量离线补丁部署实战指南
1. 内网Win7补丁部署的挑战与解决方案老旧Win7系统在内网环境中的安全隐患就像漏雨的屋顶,看似不影响日常使用,但随时可能引发严重后果。我经手过几十家单位的系统加固项目,发现这些场景存在三个典型痛点:首先是补丁来源问题&…...
)
Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析)
更多请点击: https://intelliparadigm.com 第一章:Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析) 自2024年V6.2版本起,大量用户反馈 --stylize 与 --sharp 参数组合下图像边缘锐化效果显著弱化&am…...

【紧急预警】Lindy衰减临界点已提前至第8.3个月!2024最新《营销自动化寿命健康度白皮书》限时开放前500份
更多请点击: https://kaifayun.com 第一章:Lindy衰减临界点的理论重构与实证突破 Lindy效应传统上描述“越老越长寿”的非线性生存规律,但其在现代软件系统、开源生态与协议层技术栈中的适用边界正遭遇结构性挑战。本文首次将Lindy模型从静…...
)
别再手动编译了!Matlab一键调用CEC2017测试函数的完整配置指南(附30个函数调用示例)
别再手动编译了!Matlab一键调用CEC2017测试函数的完整配置指南(附30个函数调用示例) 算法研究者们常常需要借助标准测试函数来验证优化算法的性能,而CEC2017测试函数集因其复杂性和多维度的挑战性,成为评估算法鲁棒性的…...

差分隐私GDP机制紧密度量化:从隐私剖面到∆度量的实践指南
1. 差分隐私GDP机制:从理论到实践,如何量化隐私保护紧密度在差分隐私(Differential Privacy, DP)的实际部署中,尤其是在机器学习的隐私保护训练(如DP-SGD)场景里,我们常常面临一个核…...