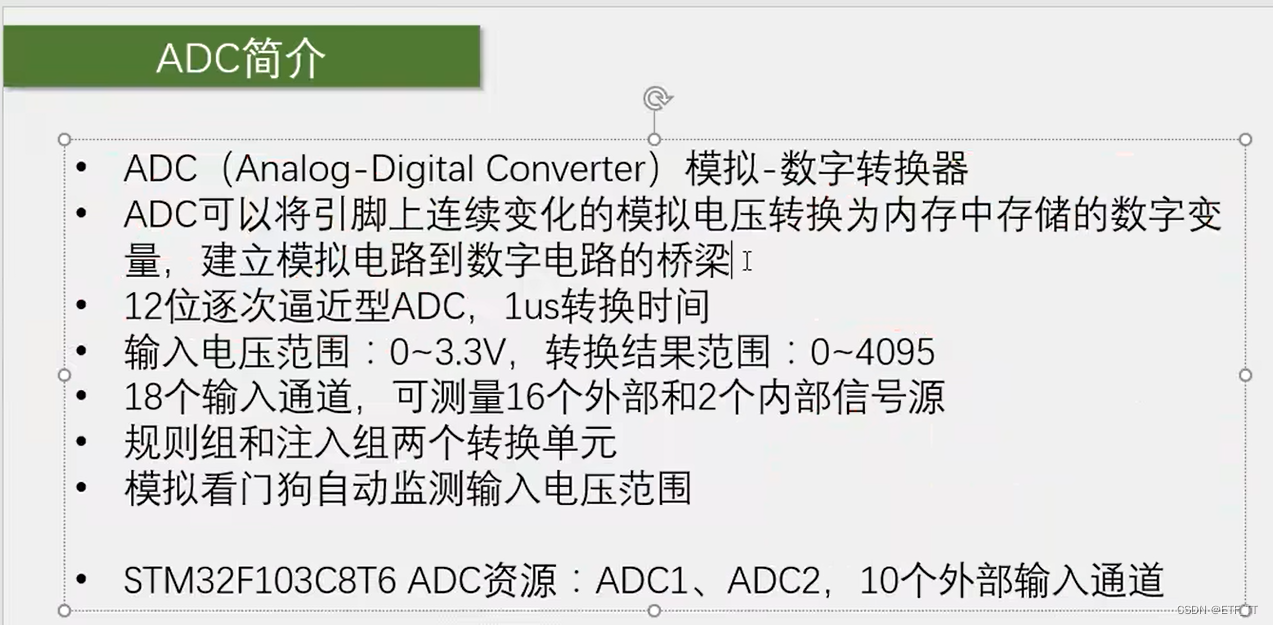
stm32-模拟数字转化器ADC








接线图:
#include "stm32f10x.h" // Device header//1: 开启RCC时钟,包括ADC和GPIO的时钟//2:配置GPIO将GPIO配置为模拟输入模式//3:配置多路开关将左边的通道接入到规则组中//4:配置ADC转换器,单次转换,连续转换,扫描还是非扫描//5:开关控制调用ADC_COM参数ADC配置完成就能正常工作
void AD_Init(void){
// void RCC_ADCCLKConfig(uint32_t RCC_PCLK2); RCC_ADCCLKConfig配置ADCCLK分频器
// void ADC_DeInit(ADC_TypeDef* ADCx); 恢复缺省配置
// void ADC_Init(ADC_TypeDef* ADCx, ADC_InitTypeDef* ADC_InitStruct); Init初始化
// void ADC_StructInit(ADC_InitTypeDef* ADC_InitStruct); 结构体初始化
// void ADC_Cmd(ADC_TypeDef* ADCx, FunctionalState NewState); 给ADC上电
// void ADC_DMACmd(ADC_TypeDef* ADCx, FunctionalState NewState); 开始DMA输出信号
// void ADC_ITConfig(ADC_TypeDef* ADCx, uint16_t ADC_IT, FunctionalState NewState); // 中断输出控制
// void ADC_ResetCalibration(ADC_TypeDef* ADCx); 复位校准
// FlagStatus ADC_GetResetCalibrationStatus(ADC_TypeDef* ADCx);获取复位校准状态
// void ADC_StartCalibration(ADC_TypeDef* ADCx); 开始校准
// FlagStatus ADC_GetCalibrationStatus(ADC_TypeDef* ADCx); 获取开始校准状态
// void ADC_SoftwareStartConvCmd(ADC_TypeDef* ADCx, FunctionalState NewState); ADC软件开始转换函数用于软件触发的函数
// FlagStatus ADC_GetSoftwareStartConvStatus(ADC_TypeDef* ADCx); ADC获取软件开始转换状态
// void ADC_DiscModeChannelCountConfig(ADC_TypeDef* ADCx, uint8_t Number); 配置间断模式每隔几个通道间断一次
// void ADC_DiscModeCmd(ADC_TypeDef* ADCx, FunctionalState NewState); 是否启用间断模式
// void ADC_RegularChannelConfig(ADC_TypeDef* ADCx, uint8_t ADC_Channel, uint8_t Rank, uint8_t ADC_SampleTime); ADC规则组通道配置
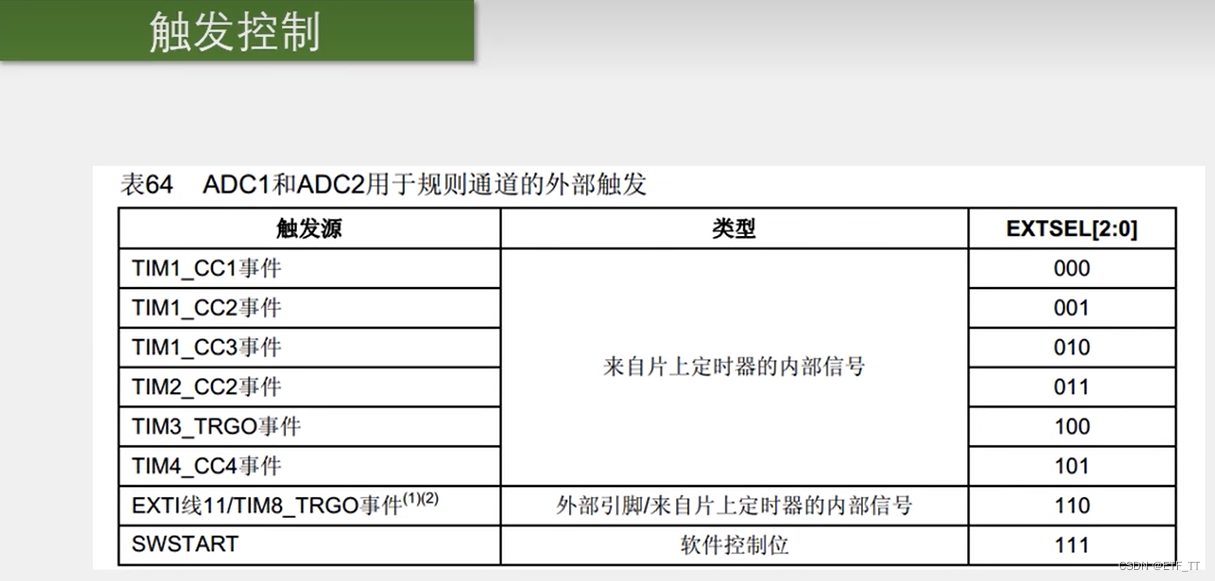
// void ADC_ExternalTrigInjectedConvCmd(ADC_TypeDef* ADCx, FunctionalState NewState); ADC外部触发转换控制是否允许外部触发转换
// uint16_t ADC_GetInjectedConversionValue(ADC_TypeDef* ADCx, uint8_t ADC_InjectedChannel); ADC获取外部触发转换值
// uint16_t ADC_GetConversionValue(ADC_TypeDef* ADCx); 获取ADC转换的数据寄存器,读取电平转换结果需要使用这个函数
// uint32_t ADC_GetDualModeConversionValue(void); ADC_获取双模式转换值,ADC双模式读取转换结果的函数
// 以下的三个函数是对模拟看门狗进行配置的函数:第一个是是否启动模拟看门狗,第二个是配置高低阈值,第三个是配置看门的通道
// void ADC_AnalogWatchdogCmd(ADC_TypeDef* ADCx, uint32_t ADC_AnalogWatchdog);
// void ADC_AnalogWatchdogThresholdsConfig(ADC_TypeDef* ADCx, uint16_t HighThreshold, uint16_t LowThreshold);
// void ADC_AnalogWatchdogSingleChannelConfig(ADC_TypeDef* ADCx, uint8_t ADC_Channel);
// void ADC_TempSensorVrefintCmd(FunctionalState NewState); ADC温度传感器,内部参考电压控制
// 以下的4个函数:第一个是获取标志位状态,第二个是清除标志位,第三个获取中断状态,第四个清除中断挂起位
// FlagStatus ADC_GetFlagStatus(ADC_TypeDef* ADCx, uint8_t ADC_FLAG);
// void ADC_ClearFlag(ADC_TypeDef* ADCx, uint8_t ADC_FLAG);
// ITStatus ADC_GetITStatus(ADC_TypeDef* ADCx, uint16_t ADC_IT);
// void ADC_ClearITPendingBit(ADC_TypeDef* ADCx, uint16_t ADC_IT);}AD.C代码
#include "stm32f10x.h" // Device header// 1: 开启RCC时钟,包括ADC和GPIO的时钟// 2:配置GPIO将GPIO配置为模拟输入模式// 3:配置多路开关将左边的通道接入到规则组中// 4:配置ADC转换器,单次转换,连续转换,扫描还是非扫描// 5:开关控制调用ADC_COM参数ADC配置完成就能正常工作void AD_Init(void){// 开启ADC的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);// 开启GPIOA的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);// 配置ADC_CLK,72MHz/6 = 12MHzRCC_ADCCLKConfig(RCC_PCLK2_Div6);// 配置GPIOGPIO_InitTypeDef GPIO_InitStructre;// 将GPIO的模式引用出来GPIO_InitStructre.GPIO_Mode =GPIO_Mode_AIN; // 选择GPIO的模式,设置为AN模拟输入的模式在AIN模式下GPIO口是没有效果的GPIO_InitStructre.GPIO_Pin = GPIO_Pin_0; // 选择GPIO的输出模式,选择输出的管脚GPIO_InitStructre.GPIO_Speed = GPIO_Speed_50MHz; // 选择GPIO的时钟频率GPIO_Init(GPIOA,&GPIO_InitStructre); // 初始化GPIO// 第二步 ---》 选择规则组的输入通道,参数二:指定通道,参数三:规则组序列器里面的次序1-16之间,参数4:指定通道的采样时间ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_239Cycles5); // 第三步 ---> 使用结构体初始化ADCADC_InitTypeDef ADC_InitStructure;// 引出结构体成员ADC_InitStructure.ADC_ContinuousConvMode = DISABLE ; // 配置扫描的模式ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; // 配置ADC的数据对齐方式ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; // 配置ADC的外部触发转换选择:这里使用内部软件触发的方式ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; // 配置ADC的工作模式为独立模式ADC_InitStructure.ADC_NbrOfChannel = 1; // 配置通道数目ADC_InitStructure.ADC_ScanConvMode = DISABLE; // 配置扫描的模式ADC_Init(ADC1,&ADC_InitStructure);// 以下还可以配置中断和模拟看门狗,根据自己的需求进行配置// 开启ADC设置,第一个ENABLE第二个开启ADC的电源ADC_Cmd(ADC1,ENABLE); // 对ADC进行校准,这里分别有四个函数可以进行配置ADC_ResetCalibration(ADC1); // 复位校准while(ADC_GetResetCalibrationStatus(ADC1) == SET); // 返回复位校准的状态ADC_StartCalibration(ADC1); // 启动校准while(ADC_GetCalibrationStatus(ADC1) == SET); // 获取校准后的状态 }
uint16_t AD_GetValue(void){// 1: 软件触发转换 2:等待触发完成也就是等待EOC标志位设置为1,3:读取ADC数据寄存器ADC_SoftwareStartConvCmd(ADC1,ENABLE); // 获取标志位状态共有5个参数,// 第一个参数AWD模拟看门狗标志位,// 第二个参数EOC规则组转换完成标志位,// 第三个参数JEOC注入组转换完成标志位,// 第四个参数:JSTRT:注入组开始转换标志位,// 第五个参数:STRT规则组开始转换标志位while(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); // 这里添加一个while空循环实现一个等待的过程// 获取ADC的结果--->使用ADC获取转换值的方式return ADC_GetConversionValue(ADC1);
}AD.H代码
#ifndef __AD_H
#define __AD_Huint16_t AD_GetValue(void);
void AD_Init(void);#endif
main函数代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "AD.h"uint16_t ADValue;
float Votage;
int main(void)
{// 初始化oledOLED_Init();AD_Init();OLED_ShowString(1,1,"ADVALUE!");OLED_ShowString(2,1,"Votage:0.00V");while (1){ADValue = AD_GetValue();Votage = (float)ADValue / 4095 * 3.3;OLED_ShowNum(1, 9, ADValue, 4); OLED_ShowNum(2, 9, Votage, 1); OLED_ShowNum(2, 11, (int)(Votage * 100) % 100, 1);Delay_ms(100);}
}
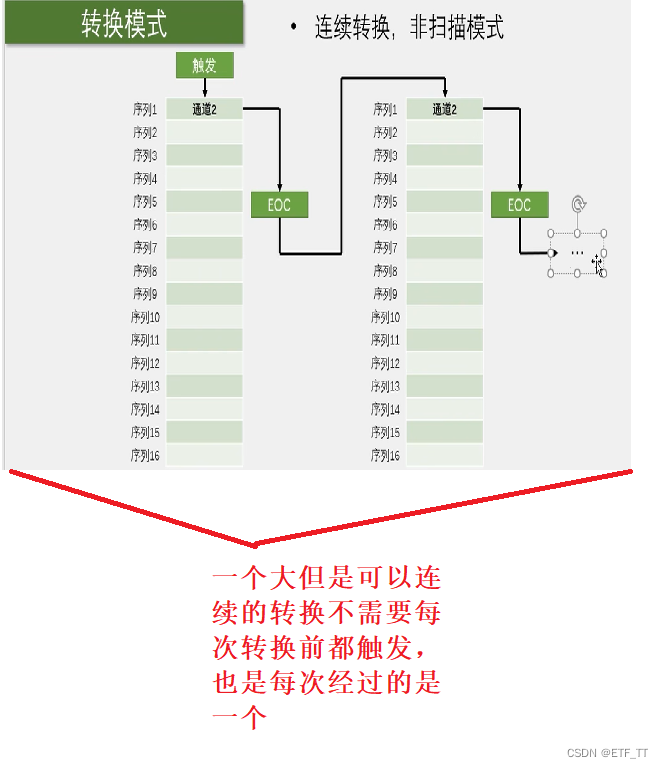
切换为连续转换模式需要修改的代码

ADC多通道实现
接线图:

#include "stm32f10x.h" // Device header// 1: 开启RCC时钟,包括ADC和GPIO的时钟// 2:配置GPIO将GPIO配置为模拟输入模式// 3:配置多路开关将左边的通道接入到规则组中// 4:配置ADC转换器,单次转换,连续转换,扫描还是非扫描// 5:开关控制调用ADC_COM参数ADC配置完成就能正常工作void AD_Init(void){// 开启ADC的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);// 开启GPIOA的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);// 配置ADC_CLK,72MHz/6 = 12MHzRCC_ADCCLKConfig(RCC_PCLK2_Div6);// 配置GPIOGPIO_InitTypeDef GPIO_InitStructre;// 将GPIO的模式引用出来GPIO_InitStructre.GPIO_Mode =GPIO_Mode_AIN; // 选择GPIO的模式,设置为AN模拟输入的模式在AIN模式下GPIO口是没有效果的GPIO_InitStructre.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_2 | GPIO_Pin_3; // 选择GPIO的输出模式,选择输出的管脚GPIO_InitStructre.GPIO_Speed = GPIO_Speed_50MHz; // 选择GPIO的时钟频率GPIO_Init(GPIOA,&GPIO_InitStructre); // 初始化GPIO// 第三步 ---> 使用结构体初始化ADCADC_InitTypeDef ADC_InitStructure;// 引出结构体成员ADC_InitStructure.ADC_ContinuousConvMode = ENABLE ; // 配置扫描的模式ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; // 配置ADC的数据对齐方式ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; // 配置ADC的外部触发转换选择:这里使用内部软件触发的方式ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; // 配置ADC的工作模式为独立模式ADC_InitStructure.ADC_NbrOfChannel = 1; // 配置通道数目ADC_InitStructure.ADC_ScanConvMode = DISABLE; // 配置扫描的模式ADC_Init(ADC1,&ADC_InitStructure);// 以下还可以配置中断和模拟看门狗,根据自己的需求进行配置// 开启ADC设置,第一个ENABLE第二个开启ADC的电源ADC_Cmd(ADC1,ENABLE); // 对ADC进行校准,这里分别有四个函数可以进行配置ADC_ResetCalibration(ADC1); // 复位校准while(ADC_GetResetCalibrationStatus(ADC1) == SET); // 返回复位校准的状态ADC_StartCalibration(ADC1); // 启动校准while(ADC_GetCalibrationStatus(ADC1) == SET); // 获取校准后的状态 // 1: 软件触发转换 2:等待触发完成也就是等待EOC标志位设置为1,3:读取ADC数据寄存器ADC_SoftwareStartConvCmd(ADC1,ENABLE);}
uint16_t AD_GetValue(uint8_t ADC_Channel){// 第二步 ---》 选择规则组的输入通道,参数二:指定通道,参数三:规则组序列器里面的次序1-16之间,参数4:指定通道的采样时间ADC_RegularChannelConfig(ADC1, ADC_Channel, 1, ADC_SampleTime_55Cycles5); ADC_SoftwareStartConvCmd(ADC1,ENABLE);while(ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC) == RESET);return ADC_GetConversionValue(ADC1);
}main函数部分代码编译和下载
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "AD.h"uint16_t AD0,AD1,AD2,AD3;
float Votage;
int main(void)
{// 初始化oledOLED_Init();AD_Init();OLED_ShowString(1,1,"AD0:");OLED_ShowString(2,1,"AD1:");OLED_ShowString(3,1,"AD3:");OLED_ShowString(4,1,"AD4:");while (1){AD0 = AD_GetValue(ADC_Channel_0);AD1 = AD_GetValue(ADC_Channel_1);AD2 = AD_GetValue(ADC_Channel_2);AD3 = AD_GetValue(ADC_Channel_3);OLED_ShowNum(1, 5, AD0, 4);OLED_ShowNum(2, 5, AD1, 4);OLED_ShowNum(3, 5, AD2, 4);OLED_ShowNum(4, 5, AD3, 4);Delay_ms(100);}
}
相关文章:
stm32-模拟数字转化器ADC
接线图: #include "stm32f10x.h" // Device header//1: 开启RCC时钟,包括ADC和GPIO的时钟//2:配置GPIO将GPIO配置为模拟输入模式//3:配置多路开关将左边的通道接入到规则组中//4:配置ADC转…...

[Repo Git] manifests的写法
manifests是个啥 在Repo中manifests描述了Repo客户端的结构,也就是可以从manifests中知道各个模块的代码应该从代码管理仓库当中哪个位置去获取。 manifests的基本结构是一个Git存储库,在顶层目录中持有一个default.xml文件。 由于m…...

位置编码与长度外推
位置编码 位置编码从前到后包括:绝对位置编码、余弦位置编码、旋转位置编码、ALiBi相对位置编码。 1 绝对位置编码(Absolute Positional Encoding) 应用的模型:BERT、GPT等Transformer基础模型广泛使用绝对位置编码来处理序列数据。 算法思想:绝对位置编码通过为序列中的…...

Linux信号补充——信号发送和保存
三、信号的发送与保存 3.1信号的发送 必须有操作系统来保存信号,因为他是管理者; 信号给进程的task_struct发送信号,在task_struct中维护了一个整数signal有0-31位,共32个bit位;对于信号的管理使用的是位图结…...

Vue3 中应该使用 Ref 还是 Reactive?
一、引言 在Vue 3中,构建响应式数据结构是构建用户界面和交互体验的核心部分。而在创建这些响应式数据时,我们有两个主要工具:reactive和ref。选择使用哪一个,实际上取决于你的数据结构和访问需求。 reactive主要用于处理复杂的数…...
红外相机和RGB相机标定:实现两种模态数据融合
1. 前期准备 RGB相机:森云智能SG2-IMX390,1个红外相机:艾睿光电IR-Pilot 640X-32G,1个红外标定板:https://item.taobao.com/item.htm?_ujp3fdd12b99&id644506141871&spma1z09.2.0.0.5f822e8dKrxxYI 2.操作步…...
前端项目,个人笔记(五)【图片懒加载 + 路由配置 + 面包屑 + 路由行为修改】
目录 1、图片懒加载 步骤一:自定义全局指令 步骤二:代码中使用 编辑步骤三:效果查看 步骤四:代码优化 2、封装组件案例-传对象 3、路由配置——tab标签 4、根据tab标签添加面包屑 4.1、实现 4.2、bug:需要…...
【MySQL】2.MySQL数据库的基本操作
目录 数据库基本操作 查看数据库信息 查看数据库结构 显示数据表的结构(字段) 常用的数据类型 数据库管理操作 SQL语句概述 SQL分类 1.DDL:数据定义语言 1.1创建数据库和表 创建数据库 创建数据表 1.2删除数据库和表 删除数据表…...
常见技术难点及方案
1. 分布式锁 1.1 难点 1.1.1 锁延期 同一时间内不允许多个客户端同时获得锁; 1.1.2 防止死锁 需要确保在任何故障场景下,都不会出现死锁; 1.2.3 可重入 特殊的锁机制,它允许同一个线程多次获取同一个锁而不会被阻塞。 1.2…...

c#关键字 static
static 修饰符可用于声明 static 类。 在类、接口和结构中,可以将 static 修饰符添加到字段、方法、属性、运算符、事件和构造函数。 static 修饰符不能用于索引器或终结器 尽管类的实例包含该类的所有实例字段的单独副本,但每个 static 字段只有一个副…...
)
redis 如何保证数据同步(数据变化时)
redis 如何保证数据同步(数据变化时) 思路 1.新增、删除和修改都先对数据库进行操作,这时数据库的数据将域缓存中数据不同。 2.数据库进行变动后,返回结果,根据返回的结果判断数据库操作是否成功。 3.如果数据库操…...

Ubuntu18.04桌面版设置静态IP地址
引用: Ubuntu配置静态IP_ubuntu配置静态ip地址-CSDN博客 正文 默认Unbuntu 18.04 Desktop桌面版使用 netplan 管理网卡网络地址。使用Unbuntu 18.04 桌面版配置,可以通过桌面上的设置图标配置网卡的静态IP地址。 点击桌面右上角下拉框,点击“设置”按…...
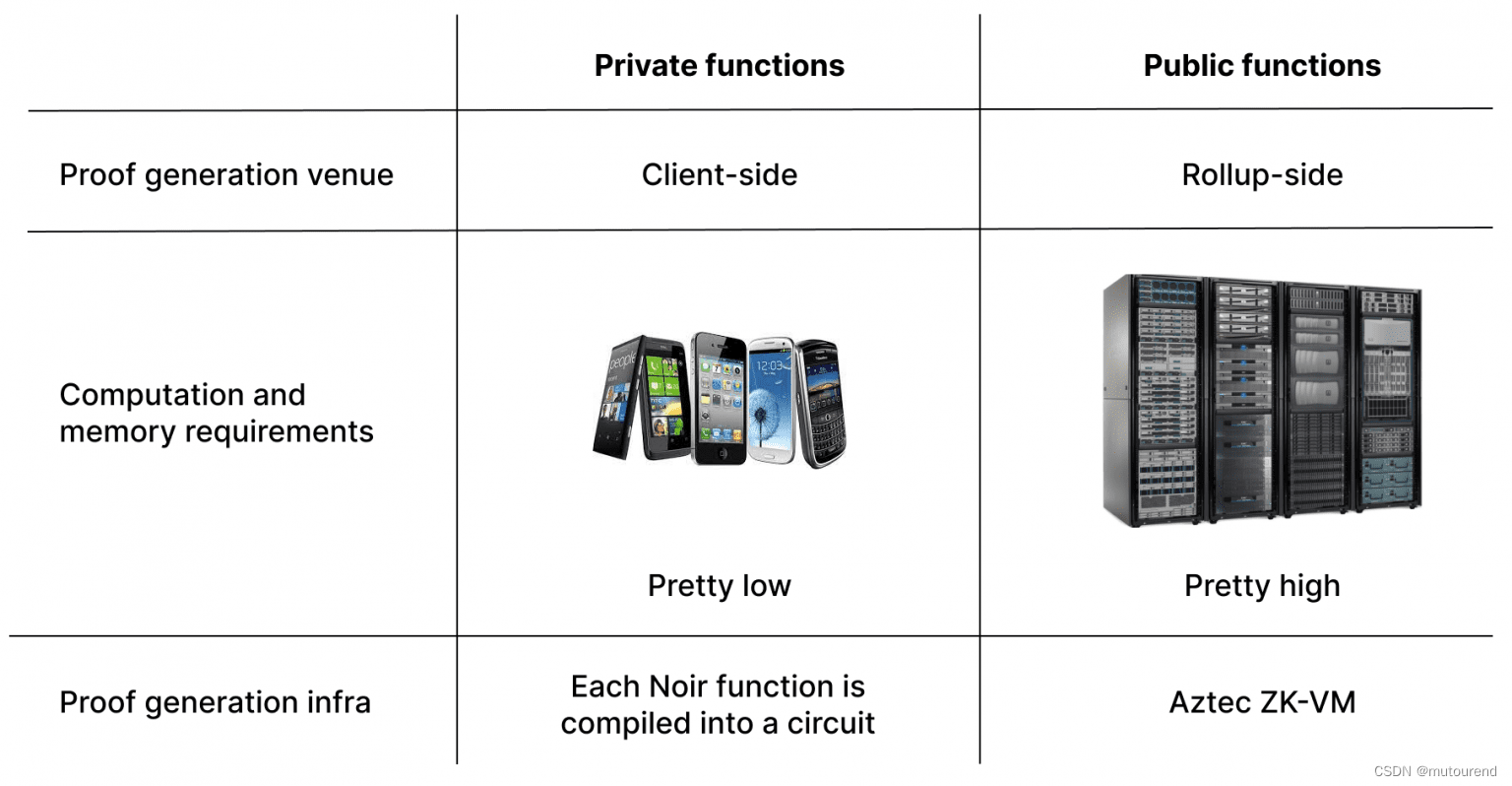
Aztec的客户端证明
1. 引言 隐私保护 zk-rollup 的证明生成与通用 zk-rollup 的证明生成有很大不同。原因是给定交易中存在特定数据(由私有函数处理),我们希望保持完全私有。在本文中,我们探讨了用于证明私有函数正确执行的客户端证明生成ÿ…...

面试官:小伙子知道synchronized的优化过程吗?我:嘚吧嘚吧嘚,面试官:出去!
写在开头 面试官:小伙子,多线程中锁用过吗? 我:那是自然! 面试官:那你知道synchronized的优化吗? 我:synchronized作为重锁,开销大,在早期不被推荐使用&…...
——第23天:风控建模中的贝叶斯优化是什么?怎么实现?)
100天精通风控建模(原理+Python实现)——第23天:风控建模中的贝叶斯优化是什么?怎么实现?
在当今风险多变的环境下,风控建模已经成为金融机构、企业等组织的核心工作之一。在各大银行和公司都实际运用于业务,用于营销和风险控制等。本文以视频的形式阐述风控建模中的召回率是什么,怎么实现。并提供风控建模原理和Python实现文章清单。 之前已经阐述了100天精通…...
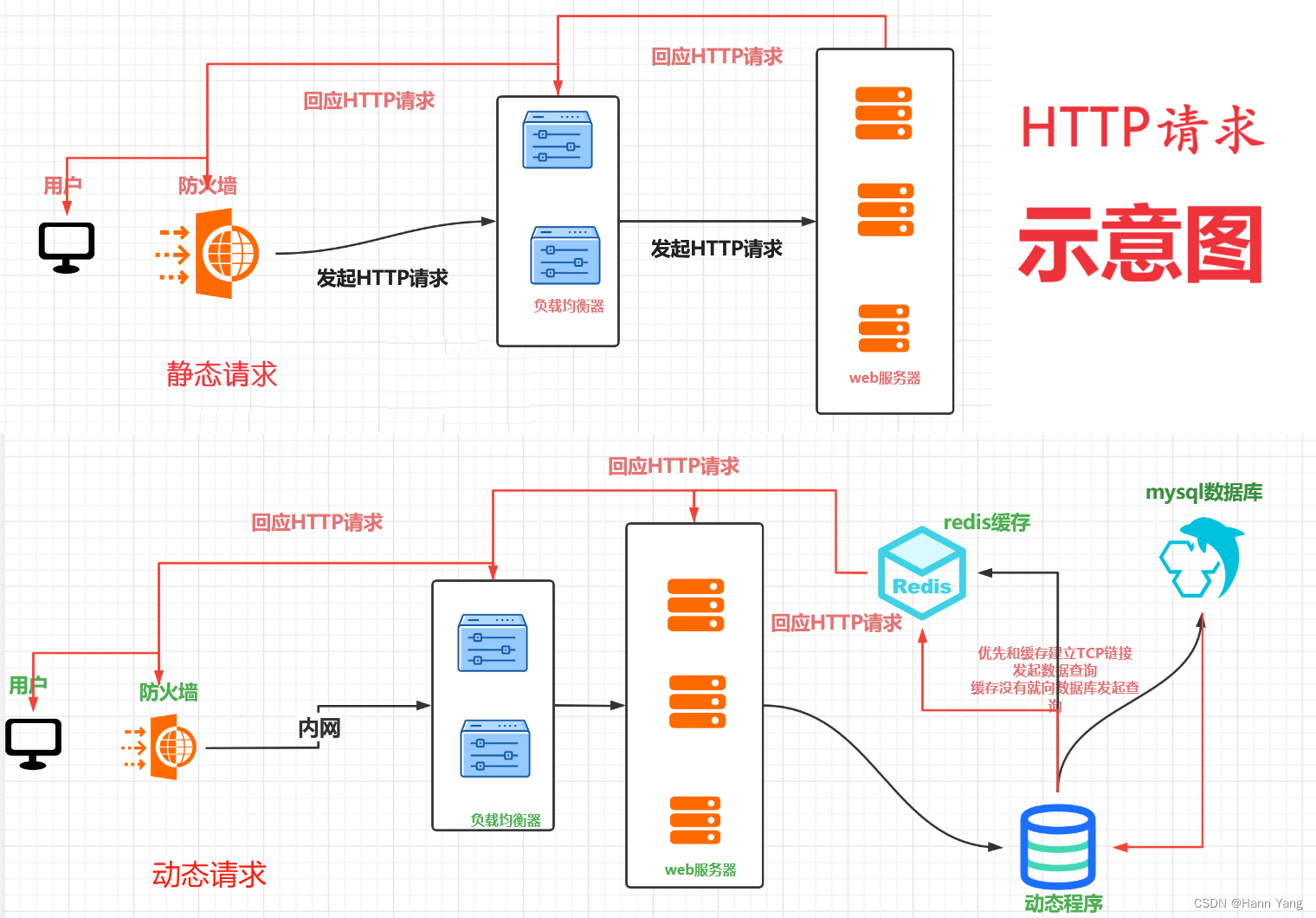
Http 超文本传输协议基本概念学习摘录
目录 HTTP协议 超文本传输协议 HyperText超文本 HTML超文本标记语言 HTTP协议原理 请求发送 服务器处理 响应发送 连接关闭或保持 HTTP协议版本 HTTP/0.9 HTTP/1.0 HTTP/1.1 HTTP/2 HTTP/3 HTTP请求方法 GET POST PUT DELETE HEAD OPTIONS HTTP请求头字…...

模拟-算法
文章目录 替换所有的问号提莫攻击Z字形变换外观数列数青蛙 替换所有的问号 算法思路: 从前往后遍历整个字符串,找到问号之后,就遍历 a ~ z 去尝试替换即可。 class Solution {public String modifyString(String s) {char[] ss s.toCharA…...
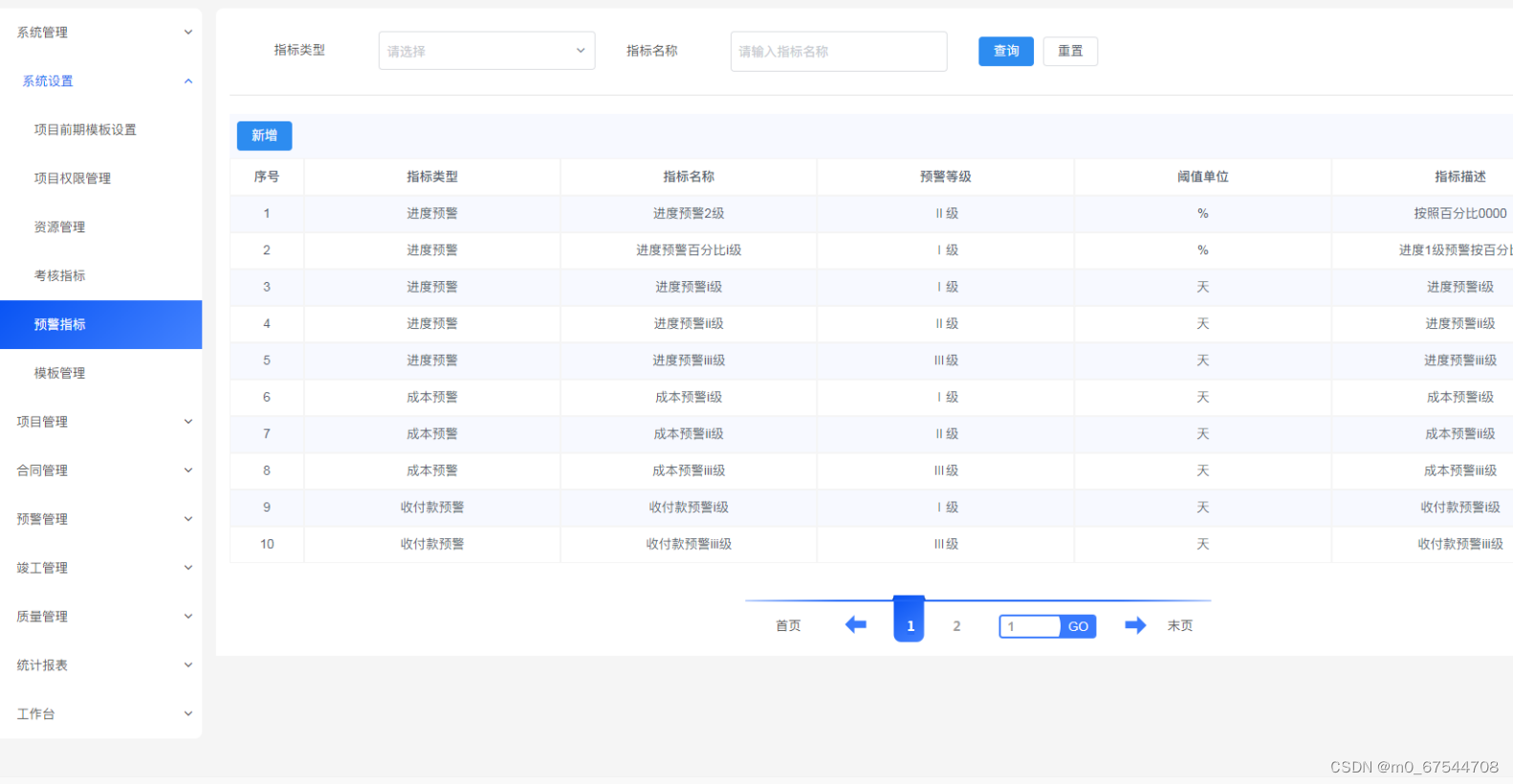
深入了解鸿鹄工程项目管理系统源码:功能清单与项目模块的深度解析
工程项目管理软件是现代项目管理中不可或缺的工具,它能够帮助项目团队更高效地组织和协调工作。本文将介绍一款功能强大的工程项目管理软件,该软件采用先进的Vue、Uniapp、Layui等技术框架,涵盖了项目策划决策、规划设计、施工建设到竣工交付…...
Unbuntu20.04 git push和pull相关问题
文章目录 Unbuntu20.04 git push和pull使用1.下载[Git工具包](https://git-scm.com/downloads)2.建立本地仓库3.将本地仓库与github远程仓库关联4.将本地仓库文件上传到github远程仓…...

hive SQL 移位、运算符、REGEXP正则等常用函数
orderflag & shiftleft(1,14) shiftleft(1,14) SQL中使用的运算符号详解_sql中各种符号-CSDN博客 Hive函数_hive shift-CSDN博客 (内建函数(类型排序)_云原生大数据计算服务 MaxCompute(MaxCompute)-阿里云帮助中心)...
)
Python基础语法:生成器 generator(yield)
一、简介根据指定的规则循环生成数据,当条件不成立时则生成数据结束。数据不是一次性全部生成出来,而是使用一个,再生成一个,好处是可以节约大量的内存。就像设计模式中的懒汉式。适合处理大数据或流数。生成器是一种特殊的迭代器…...

贵阳婚礼西服定制攻略:面料、工艺、版型避坑指南
婚礼西装是男士婚礼造型的核心,区别于日常商务正装,婚礼西服更看重版型精致度、面料质感、上身挺拔感以及镜头适配度。在贵阳备婚的新人,大多会放弃成品西装,选择专属定制服务。但本地婚礼西服定制市场参差不齐,很多新…...

厨房空调技术白皮书:从风冷到水冷,制冷系统在厨房场景中的工程化演进
厨房空调是暖通行业近三年技术迭代最密集的细分品类。从最初的"凉霸"(本质是风扇),到风冷分体式,再到水冷一体式,每代技术都在解决上一代没有覆盖的用户痛点。本文以工程技术视角,梳理四代厨房制…...

当 AI Coding 进入复杂企业系统,为什么提效远没有宣传里那么美好 ?
以 Claude Code、Codex 为代表的自主编码智能体(Coding Agents),正在以惊人的速度席卷软件开发者生态。与此同时,类似“10 倍开发效率”“普通人也能随手构建软件”“程序员即将失业”的说法,也随处可见。这种不分场景…...

用图神经网络做缺陷定位,准确率比传统方法高出30%
在现代软件工程的复杂迷宫中,缺陷定位始终是测试团队面临的核心挑战。想象这样一个场景:一个电商系统在特定压力条件下偶发订单丢失,日志中只留下泛泛的超时错误,问题可能深藏在上百个微服务的调用链、分布式事务的竞态条件或某个…...

揭秘Midjourney云雾渲染失效真相:3大隐性提示词冲突、2类SDXL迁移兼容漏洞及实时雾浓度校准公式
更多请点击: https://intelliparadigm.com 第一章:揭秘Midjourney云雾渲染失效真相:3大隐性提示词冲突、2类SDXL迁移兼容漏洞及实时雾浓度校准公式 Midjourney V6 在启用云雾(mist/fog/haze)类视觉效果时,…...

3分钟掌握抖音视频批量下载:解放双手的素材收集革命
3分钟掌握抖音视频批量下载:解放双手的素材收集革命 【免费下载链接】douyinhelper 抖音批量下载助手 项目地址: https://gitcode.com/gh_mirrors/do/douyinhelper 还在为一个个手动保存抖音视频而烦恼吗?想要高效收集创作者素材却苦于没有合适的…...

OpenPLC虚拟PLC:5分钟搭建开源工业控制器的完整指南
OpenPLC虚拟PLC:5分钟搭建开源工业控制器的完整指南 【免费下载链接】OpenPLC Software for the OpenPLC - an open source industrial controller 项目地址: https://gitcode.com/gh_mirrors/op/OpenPLC 想要零成本学习工业自动化?OpenPLC虚拟PL…...

基于A2A协议将智能体注册到Nacos3.x
1.配置和简介Nacos3.x比Nacos2.x多了可以注册智能体的功能。配置密钥,32位即可启动分为集群模式和单机模式,单机模式下,默认存储在derby下。2.智能体注册中心:AgentScope也是自带注册中心的,叫AgentScopeA2aServer。现…...

终极空洞骑士模组管理器 Lumafly:跨平台一键安装与智能依赖管理指南
终极空洞骑士模组管理器 Lumafly:跨平台一键安装与智能依赖管理指南 【免费下载链接】Lumafly A cross platform mod manager for Hollow Knight written in Avalonia. 项目地址: https://gitcode.com/gh_mirrors/lu/Lumafly Lumafly 是一款基于 Avalonia 框…...