ROS1通过rosbridge在局域网中控制turtle进行运动(PC和手机)
通过ROSbridge控制小海龟(turtlesim)的具体案例。使用一个简单的Python脚本通过通过局域网上连接上传ROSbridge服务器,并发送速度指令来控制小海龟的移动
功能包的结构如下:
HTML文件的编写(界面)
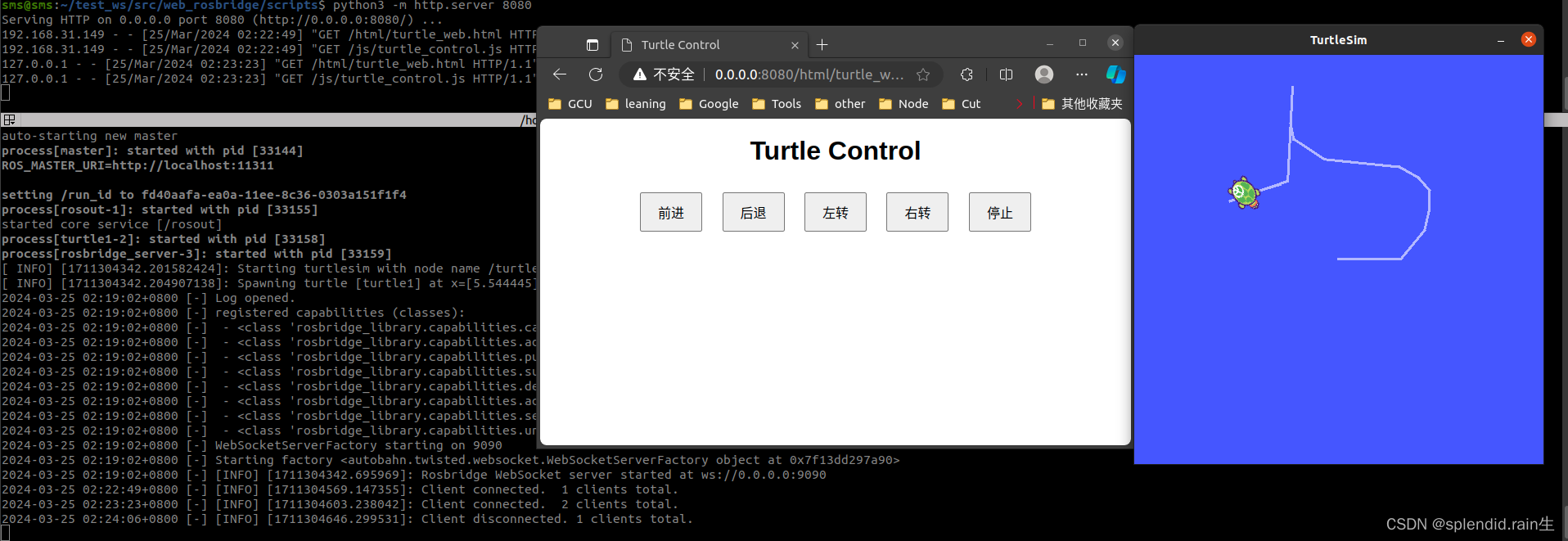
html用于存放html文件,内容包含了可以通过前进,后退,左转,右转,停止等动作,在这里已经编写好了,最后的效果如下图:
在这里附上程序源码,将源码复制自己的目录的当中即可,也不一定是要在自己的功能包当中
<!DOCTYPE html>
<html lang="en">
<head> <meta charset="UTF-8"> <meta name="viewport" content="width=device-width, initial-scale=1.0"> <title>Turtle Control</title> <style> /* 简单的样式 */ body { font-family: Arial, sans-serif; text-align: center; } button { margin: 10px; padding: 10px 20px; font-size: 16px; } </style>
</head>
<body> <h1>Turtle Control</h1> <button id="forwardButton">前进</button> <button id="backwardButton">后退</button> <button id="leftButton">左转</button> <button id="rightButton">右转</button> <button id="stopButton">停止</button> <script src="../js/turtle_control.js"></script>
</body>
</html>
在上述的html文件当中,会用到一个叫turtle_control.js的文件,这个文件就是后续需要通过编写然后给ROS系统传递信息。路径需要自行记住。
JS文件的编写(发送控制消息)
同样的通过编写js文件,语法就是经典的JavaScript,程序源码如下:
下面的程序当中,192.168.31.110要更换成自己的 ip地址,后面的9090要记住,后面调用rosbridge 的时候会用得上。
// WebSocket连接信息
const wsUri = "ws://192.168.31.110:9090";
let socket = new WebSocket(wsUri); // 定义速度消息
function createVelocityCommand(linear, angular) { return JSON.stringify({ op: "publish", type: "geometry_msgs/Twist", topic: "/turtle1/cmd_vel", msg: { linear: { x: linear, y: 0, z: 0 }, angular: { x: 0, y: 0, z: angular } } });
} // 处理WebSocket连接打开
socket.onopen = function(event) { console.log("Connected to ROSbridge");
}; // 处理WebSocket接收到的消息
socket.onmessage = function(event) { console.log("Received:", event.data);
}; // 处理WebSocket错误
socket.onerror = function(error) { console.error("WebSocket Error:", error);
}; // 处理按钮点击事件
document.getElementById('forwardButton').addEventListener('click', function() { socket.send(createVelocityCommand(1, 0)); // 前进
}); document.getElementById('backwardButton').addEventListener('click', function() { socket.send(createVelocityCommand(-1, 0)); // 后退
}); document.getElementById('leftButton').addEventListener('click', function() { socket.send(createVelocityCommand(0, 1)); // 左转
}); document.getElementById('rightButton').addEventListener('click', function() { socket.send(createVelocityCommand(0, -1)); // 右转
}); document.getElementById('stopButton').addEventListener('click', function() { socket.send(createVelocityCommand(0, 0)); // 停止
}); // 可以在这里添加更多的逻辑,比如处理关闭连接等
安装rosbridge_suite包
确保你已经安装了ROS和rosbridge_suite包。你可以通过以下命令安装它们(以ROS Noetic为例):
sudo apt-get install ros-noetic-rosbridge-suite
开始执行
然后,启动ROScore和小海龟仿真器:
roscore
rosrun turtlesim turtlesim_node
接下来,启动ROSbridge WebSocket服务器。你可以使用rosbridge_websocket包来做到这一点:
rosrun rosbridge_server rosbridge_websocket
在这里为了方便,我写成了一个launch文件同时启动这两个节点,程序内容如下:
<?xml version="1.0"?>
<launch><node pkg="turtlesim" type="turtlesim_node" name="turtle1" output="screen"/><node pkg="rosbridge_server" type="rosbridge_websocket" name="rosbridge_server" output="screen"/>
</launch>
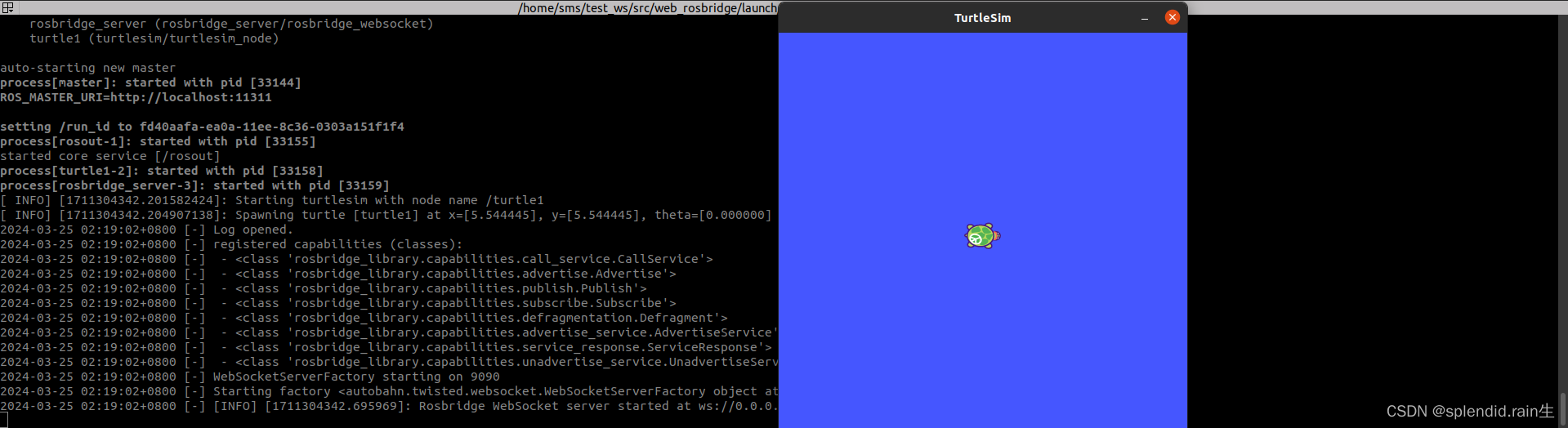
接着就可以按部就班的执行了
-
新建一个命令行终端,输入指令
roslaunch web_rosbridge web_rosbridge.launch
-
然后再新建一个命令行终端,接着输入指令
python3 -m http.server 8080



这两个指令的ip地址要区分开rosbridge通信的地址是的localhost:9090,而上传到本地的服务端用到的是8080端口,也就是我们只需要通过查看自己的设备在同一个局域网下的ip地址,后面跟上8080,就可以访问了,还有就是需要注意的就是输入第二个指令执行这个http.server服务的时候,尽量在自己html目录下进行执行,方便打开对应的ip地址直接可以进行查看。
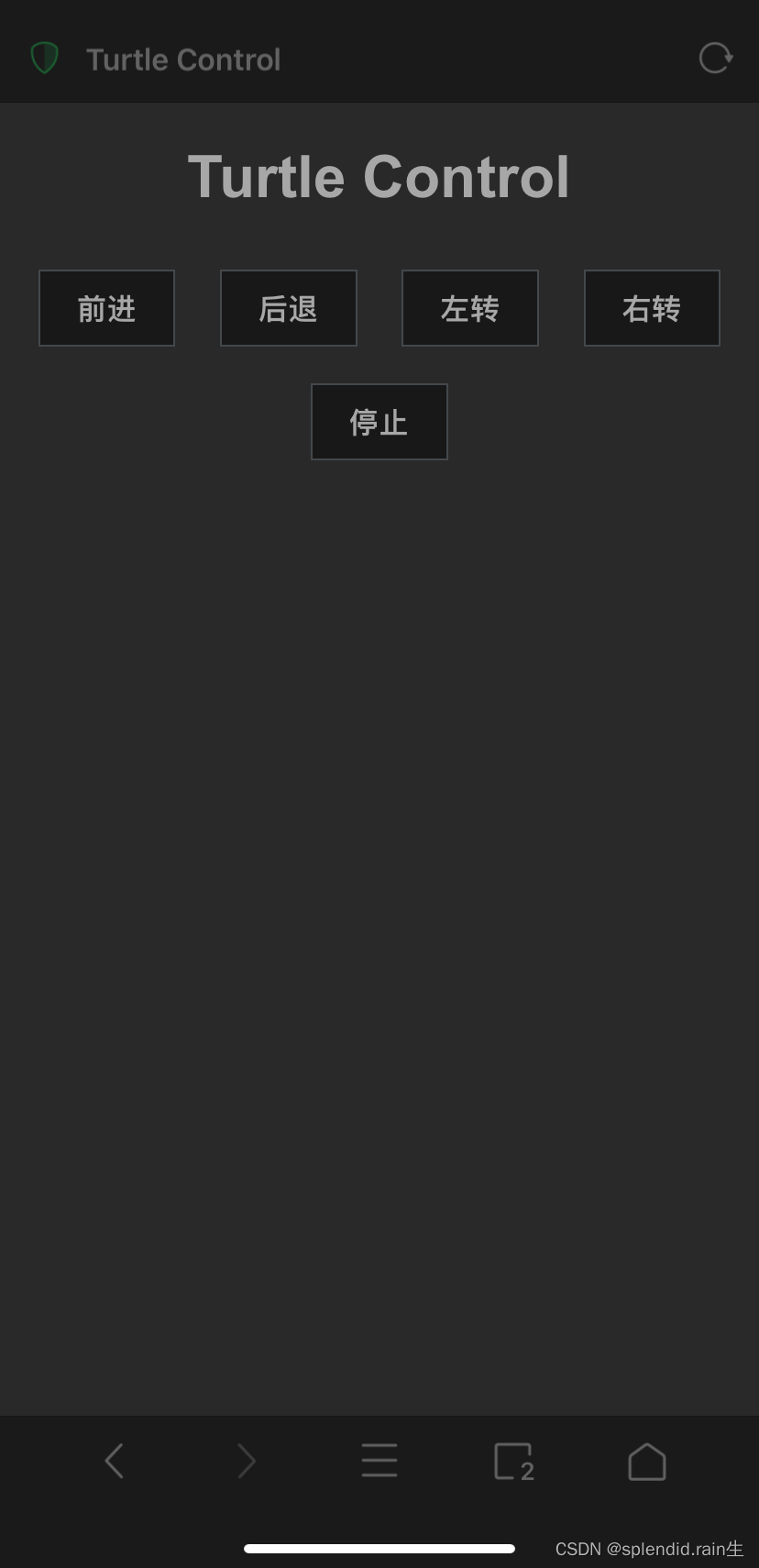
同样的我们通过手机,连接上同样的局域网之后,接着输入自己手机的ip地址到浏览器上,记得加上对应的8080号端口,效果如下:
🌸🌸🌸完结撒花🌸🌸🌸
🌈🌈Redamancy🌈🌈
相关文章:
ROS1通过rosbridge在局域网中控制turtle进行运动(PC和手机)
通过ROSbridge控制小海龟(turtlesim)的具体案例。使用一个简单的Python脚本通过通过局域网上连接上传ROSbridge服务器,并发送速度指令来控制小海龟的移动 功能包的结构如下: HTML文件的编写(界面) html用…...
MQ高级篇---消息可靠性
MQ的一些常见问题 后面内容基于springboot 2.3.9.RELEASE 消息可靠性 生产者确认机制 在publisher微服务中application.yml中添加 spring:rabbitmq:publisher-confirm-type: correlatedpublisher-returns: truetemplate:mandatory: true每个RabbitTemplate只能配置一个Return…...

SpringMVC | SpringMVC中的 “文件上传和下载”
目录: 一、文件上传1.1 文件上传“概述”1.2 文件上传“具体配置” :“前端”中配置“文件上传” ( type“file” 满足3个条件 )“后端”中配置“文件上传” ( 配置id为“CommonsMultipartResolver”的bean 配置“文件上传”的“约束条件” 通过“MultipartFile接口”参数接…...
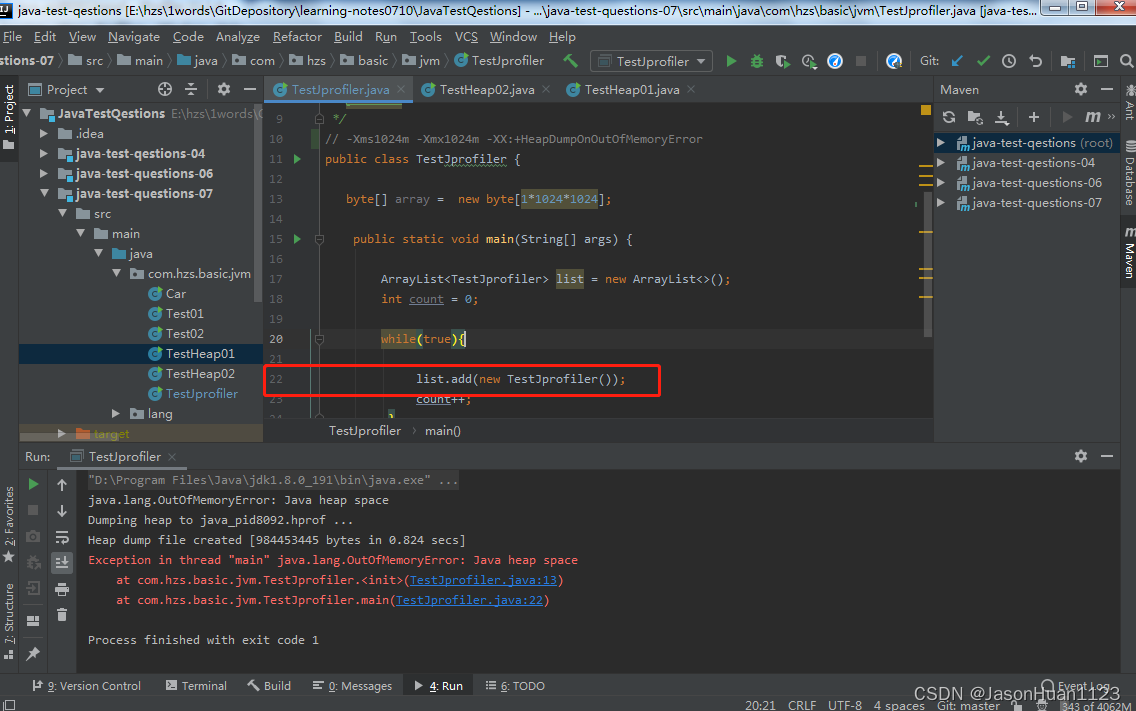
JVM快速入门(2)HotSpot和堆、新生区、永久区、堆内存调优、JProfiler工具分析OOM原因、GC(垃圾回收)、JVM经典面试笔试题整理
5.6 HotSpot和堆 5.6.1 Hotspot 三种JVM: Sun公司,HotspotBEA,JRockitIBM,J9 VM,号称是世界上最快的Java虚拟机 我们一般学习的是:HotSpot 5.6.2 堆 Heap,一个JVM只有一个堆内存,…...
我的风采——android studio
目录 实现“我的风采”页面要求理论代码生成apk文件 实现“我的风采”页面 要求 要求利用’java框架的边框布局实现“找的风采 ”页而,其中中间为你的生活照,左右和下面为按钮,上面为标签 理论 Java GUI编程是Java程序设计的重要组成部分…...
BMS设计中的短路保护和MOSFET选型(上)
电池管理系统(BMS)是一种能够对电池进行监控和管理的电子装备,是电池与用户之间的纽带。通过对电压、电流、温度以及SOC等数据采集,计算进而控制电池的充放电过程,主要就是为了能够提高电池的利用率,防止电…...
)
用go实现一个任务调度类 (泛型)
用go实现一个任务调度类 (泛型) 源码地址: https://github.com/robinfoxnan/BirdTalkServer/blob/main/server/core/workmanager.go 1.概述 实现了一个简单的任务管理系统,允许用户定义任务和工作者,并将任务分配给…...

ansible 管理工具以及常用模块
一、前期准备 1、安装 yum install ansible 如果yum源没有ansible,需要提前配置yum源: mv /etc/yum.repos.d/epel.repo /etc/yum.repos.d/epel.repo.backup mv /etc/yum.repos.d/epel-testing.repo /etc/yum.repos.d/epel-testing.repo.backup wget -O…...

javaSSM公司招聘管理系统IDEA开发mysql数据库web结构计算机java编程maven项目
一、源码特点 IDEA开发SSM公司招聘管理系统是一套完善的完整企业内部系统,结合SSM框架和bootstrap完成本系统,对理解JSP java编程开发语言有帮助系统采用SSM框架(MVC模式开发)MAVEN方式加 载,系统具有完整的源代码和…...

蓝桥杯day11刷题日记
P8615 [蓝桥杯 2014 国 C] 拼接平方数 思路:先把数据范围内的平方数打上标记,然后就是遍历这个区间,转成字符串(好拆数据),用substr拆开数据,再强转成整数类型,最后查看拆开的数据是…...
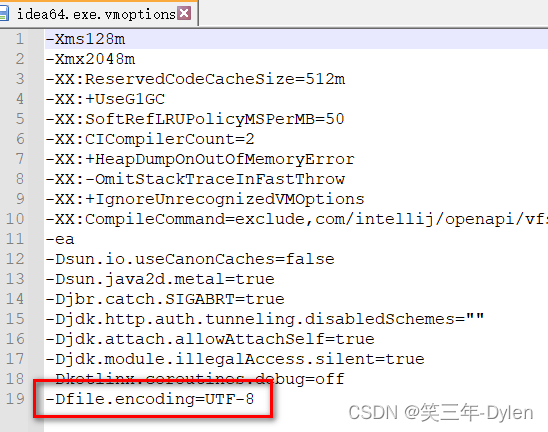
IDEA, Pycharm, Goland控制台乱码
IDEA, Pycharm, Goland控制台乱码 问题描述: 控制台出现����等乱码 复现频率: 总是 解决方案: 以IDEA为例 添加 -Dfile.encodingUTF-8位置 idea64.exe.vmoptions 在安装idea的bin目录idea.vmoptions idea客户端 示意图...
)
JavaScript单元测试jasmine学习(一)
介绍: jasmine是用于测试JavaScript的一种测试框架,BDD(Behavior Driven Development)行为驱动开发。不依赖于任何其他JavaScript框架,也不需要DOM 准备工作: 1. 首先添加jasmine到自己的项目中 npm install --save-dev jasmine 2. 在项目…...
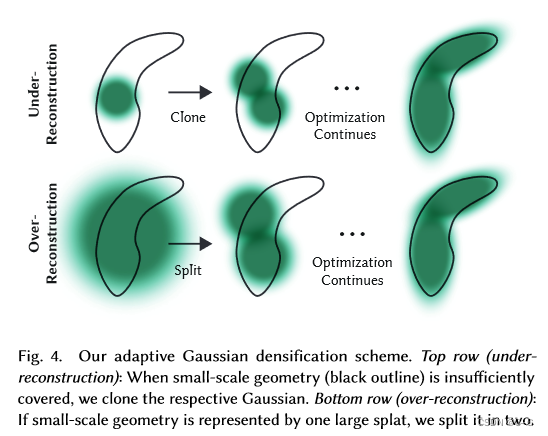
108、3D Gaussian Splatting for Real-Time Radiance Field Rendering
简介 官网 更少训练时间的同时实现最先进的视觉质量,能在1080p分辨率下实现高质量的实时(≥30 fps)新视图合成 NeRF使用隐式场景表示,体素,点云等属于显示建模方法,3DGS就是显示辐射场。它用3D高斯作为灵活高效的表示方法&…...

PHP之CURL和Socket
文章目录 一、CURL1.基本流程(1)初始化(2)向服务器发送请求(3)向服务器发送请求(4)关闭curl 2.CURLOPT参数记得写一个文件curl上传的例子记得写一个json上传的例子3.CURL批处理 二、…...
【Web】NKCTF 2024 个人wp(部分)
目录 my first cms 全世界最简单的CTF attack_tacooooo 属实太菜了,3/4 my first cms 一眼搜版本2.2.19 CVE -CVE-2024-27622 GitHub - capture0x/CMSMadeSimple 访问/admin/login.php 爆出弱口令,后台登录 admin Admin123 Extensions > User D…...
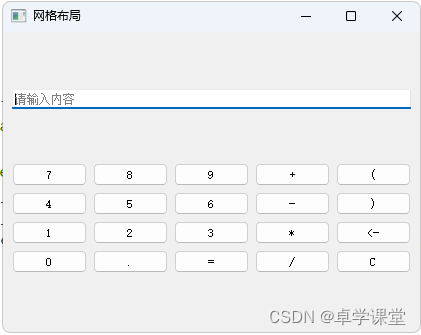
QT常见布局器使用
布局简介 为什么要布局?通过布局拖动不影响鼠标拖动窗口的效果等优点.QT设计器布局比较固定,不方便后期修改和维护;在Qt里面布局分为四个大类 : 盒子布局:QBoxLayout 网格布局:QGridLayout 表单布局&am…...
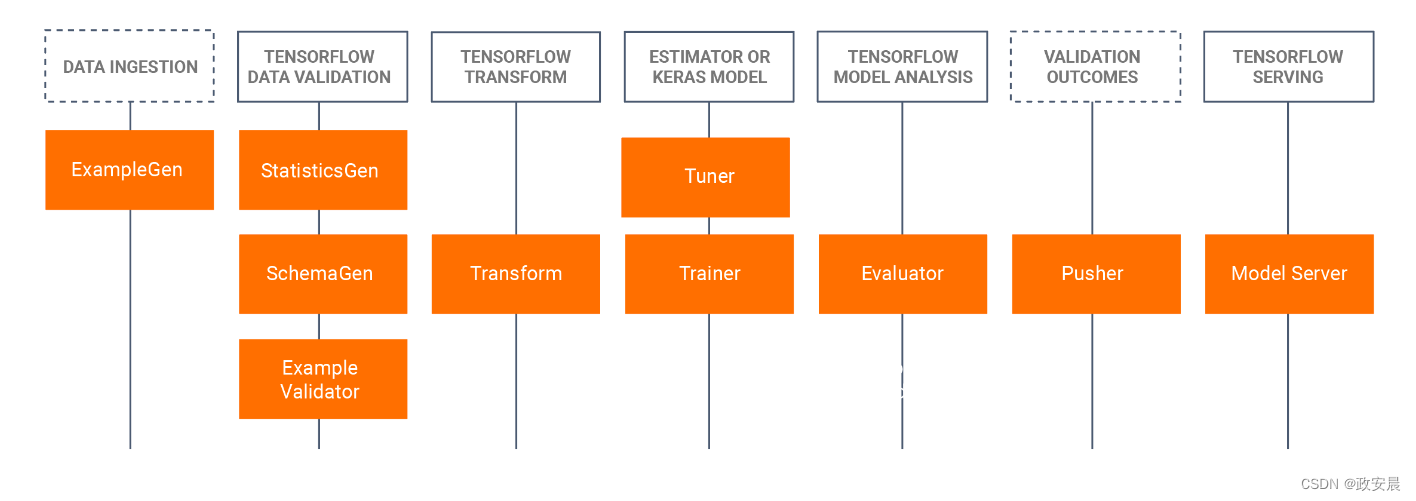
政安晨:【深度学习部署】—— TensorFlow Extended(TFX)介绍
政安晨的个人主页:政安晨 欢迎 👍点赞✍评论⭐收藏 收录专栏: TensorFlow与Keras实战演绎机器学习 希望政安晨的博客能够对您有所裨益,如有不足之处,欢迎在评论区提出指正! 前言 TensorFlow Extended(TFX&a…...

宝石与石头
宝石与石头 链接:https://leetcode.cn/problems/jewels-and-stones/description/ 给你⼀个字符串 jewels 代表石头中宝石的类型,另有⼀个字符串 stones 代表你拥有的石头。 stones 中每个字符代表了⼀种你拥有的石头的类型,你想知道你拥有的石头中有多…...
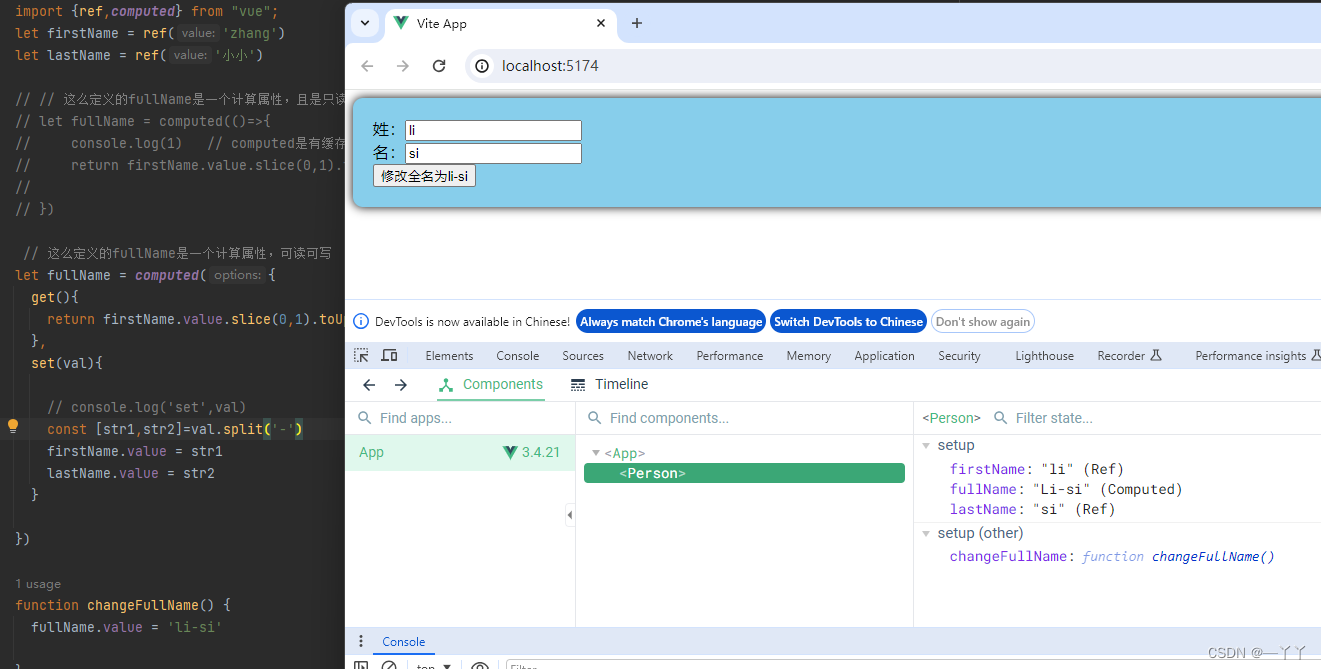
【Vue3之computed属性(四)】
文章目录 前言一、computed属性有缓存二、使用方法三、修改全名 前言 理解computed属性,实现输入姓和名得出全名并双向绑定,区分单向绑定和双向绑定。测试computed属性和方法的区别 一、computed属性有缓存 先引入computed,写箭头函数定义并…...

生产力工具|安装更新R软件(R、studio)
内容介绍: 安装R软件: 下载 R X64 3.5.1: 访问官方R网站 https://cran.r-project.org/。选择适合Windows版本的安装包。将安装包下载到您的计算机。 本地安装: 运行下载的“R-3.5.1-win.exe”文件。按照安装向导,选择安装路径,取消…...

3分钟快速上手:用BetterNCM安装器彻底改造你的网易云音乐
3分钟快速上手:用BetterNCM安装器彻底改造你的网易云音乐 【免费下载链接】BetterNCM-Installer 一键安装 Better 系软件 项目地址: https://gitcode.com/gh_mirrors/be/BetterNCM-Installer 还在使用功能单一的网易云音乐吗?想不想让你的播放器拥…...

销售怎么通过各种方法获取电话号码
第一种就是那个用爬虫电话号码,然后再打电话给客户。第二种是在别人的挪车电话看车挪车电话,然后再打电话找客户。第三就是。扫楼一顿顿的扫,第四就是这个那种商店,一个个的去问陌拜地推一个个的问店子要不要贷款,去问…...

WarcraftHelper:魔兽争霸III现代兼容性问题的终极解决方案指南
WarcraftHelper:魔兽争霸III现代兼容性问题的终极解决方案指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 魔兽争霸III作为经典即时战…...

Taotoken如何帮助教育科技产品实现个性化学习辅导
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken如何帮助教育科技产品实现个性化学习辅导 1. 场景与挑战 教育科技公司在开发个性化学习助手时,常常面临一个核…...

LangGraph状态机工程:构建复杂AI工作流的完整指南
传统RAG(检索增强生成)在处理简单的"单跳"问题时表现良好——“文章里提到了什么” “这个概念是什么意思”——但当问题涉及多个实体之间的关系、需要跨多个文档推理时,传统RAG就显得力不从心。GraphRAG(Graph-based R…...

巨量投放总结
巨量商务管理平台 : https://business.oceanengine.com 巨量广告投放平台: https://ad.oceanengine.com 商务管理平台 账户 广告组 计划 广告投放平台 层级关系: 广告组 -> 计划 -> 创意 对应FB: 系列 - > 广告组 -> 广告...

淘宝淘金币自动化脚本终极指南:如何每天节省25分钟实现智能任务管理
淘宝淘金币自动化脚本终极指南:如何每天节省25分钟实现智能任务管理 【免费下载链接】taojinbi 淘宝淘金币自动执行脚本,包含蚂蚁森林收取能量,芭芭农场全任务,解放你的双手 项目地址: https://gitcode.com/gh_mirrors/ta/taoji…...

榨干Codex!OpenAI工程师亲授Codex真正用法
你可能把 Codex 当编程助手用,改改代码,跑跑测试。但它的能力远不止于此。OpenAI 的客户支持工程师 Jason(jxnlco)告诉你,Codex 其实是一套完整的电脑工作系统,从语音输入到自动化,从浏览器操控…...

3分钟告别英文恐惧:Android Studio中文界面轻松切换指南
3分钟告别英文恐惧:Android Studio中文界面轻松切换指南 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack 你是否曾经因…...

ModernWMS核心功能详解:从ASN入库到Dispatch出库的完整工作流
ModernWMS核心功能详解:从ASN入库到Dispatch出库的完整工作流 【免费下载链接】ModernWMS The open source simple and complete warehouse management system is derived from our many years of experience in implementing erp projects. We stripped the origin…...