108、3D Gaussian Splatting for Real-Time Radiance Field Rendering
简介
官网
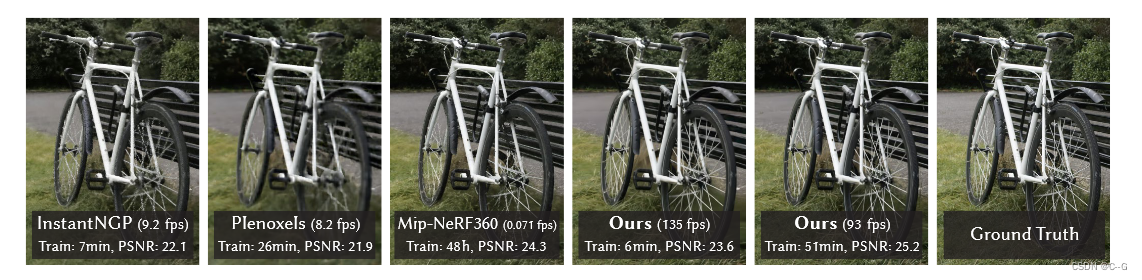
更少训练时间的同时实现最先进的视觉质量,能在1080p分辨率下实现高质量的实时(≥30 fps)新视图合成
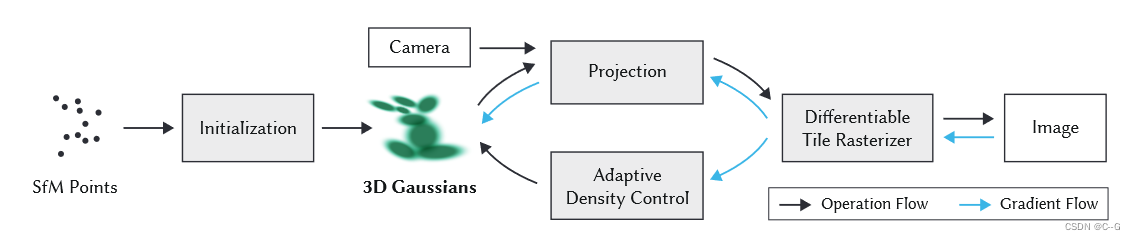
NeRF使用隐式场景表示,体素,点云等属于显示建模方法,3DGS就是显示辐射场。它用3D高斯作为灵活高效的表示方法,同时利用神经网络的特性进行参数优化,旨在以更快的训练速度和实时性能实现高质量的渲染,尤其适用于复杂场景和高分辨率输出。
nerf是一个连续的表示,隐含地表示空/占用空间;为了找到空间点的样本,需要进行昂贵的随机抽样,由此产生噪声和计算开销。相比之下,点是一种非结构化的离散表示,它具有足够的灵活性,可以创建、破坏和替换类似于NeRF的几何体。这是通过优化不透明度和位置来实现的,同时避免了完整体积表示的缺点
知识补充
协方差矩阵
方差:度量单个随机变量的离散程度,越大,越离散
V a r ( x ) = 1 n − 1 ∑ i = 1 n ( x i − μ x ) 2 \begin{align} Var(x) = \frac{1}{n-1}\sum^n_{i=1}(x_i-\mu_x)^2 \end{align} Var(x)=n−11i=1∑n(xi−μx)2
n为样本量, μ x \mu_x μx表示观测样本的均值
协方差:两个个随机变量的相似程度,负数为负相关,正数为正相关,0为无关
C o v ( a , b ) = n − 1 ∑ i = 1 n ( a i − μ a ) ( b i − μ b ) \begin{align} Cov(a,b)=\frac{n-1}\sum^n_{i=1}(a_i-\mu_a)(b_i-\mu_b) \end{align} Cov(a,b)=∑n−1i=1n(ai−μa)(bi−μb)
方差也可以看作是自己对自己求协方差
协方差矩阵
Σ = [ C o v ( x 1 , x 1 ) C o v ( x 1 , x 2 ) ⋯ C o v ( x 1 , x d ) C o v ( x 2 , x 1 ) C o v ( x 2 , x 2 ) ⋯ C o v ( x 2 , x d ) ⋮ ⋮ ⋱ ⋮ C o v ( x d , x 1 ) C o v ( x d , x 2 ) ⋯ C o v ( x d , x d ) ] ∈ R d × d \begin{align} \Sigma = \begin{bmatrix} {Cov(x_1,x_1)}&{Cov(x_1,x_2)}&{\cdots}&{Cov(x_1,x_d)}\\ {Cov(x_2,x_1)}&{Cov(x_2,x_2)}&{\cdots}&{Cov(x_2,x_d)}\\ {\vdots}&{\vdots}&{\ddots}&{\vdots}\\ {Cov(x_d,x_1)}&{Cov(x_d,x_2)}&{\cdots}&{Cov(x_d,x_d)}\\ \end{bmatrix} \in R^{d \times d} \end{align} Σ= Cov(x1,x1)Cov(x2,x1)⋮Cov(xd,x1)Cov(x1,x2)Cov(x2,x2)⋮Cov(xd,x2)⋯⋯⋱⋯Cov(x1,xd)Cov(x2,xd)⋮Cov(xd,xd) ∈Rd×d
对角线上的元素为各个随机变量的方差,非对角线上的元素为两两随机变量之间的协方差,协方差矩阵是对称矩阵
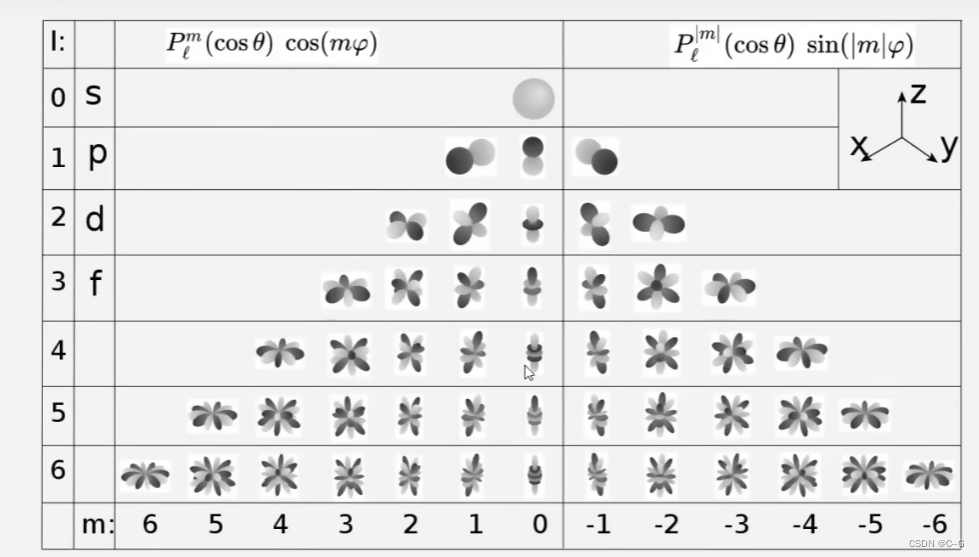
球谐函数
如高等数学中的傅里叶变换,任何一个二维函数可以分解为不同的正弦与余弦之和:
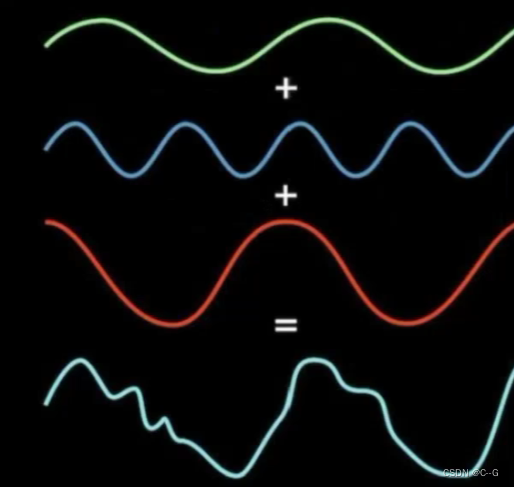
f ( x ) = a 0 + ∑ n = 1 + ∞ a n cos n π i x + b n sin n π i x \begin{align} f(x) = a_0 + \sum^{+\infty}_{n=1}a_n\cos {\frac{n\pi}{i}}x+b_n\sin {\frac{n\pi}{i}}x \end{align} f(x)=a0+n=1∑+∞ancosinπx+bnsininπx
这里的 cos n π l x \cos {\frac{n\pi}{l}}x coslnπx 和 sin n π l x \sin {\frac{n\pi}{l}}x sinlnπx叫做基函数,原则上讲当 n → + ∞ n \to +\infty n→+∞时,可以完美拟合这个函数,也可以对这个函数进行近似
f ( x ) ≈ a 0 + ∑ n = 1 i a n cos n π i x + b n sin n π i x \begin{align} f(x) \approx a_0 + \sum^{i}_{n=1}a_n\cos {\frac{n\pi}{i}}x+b_n\sin {\frac{n\pi}{i}}x \end{align} f(x)≈a0+n=1∑iancosinπx+bnsininπx
如果函数是一个有界的,闭合的,平滑的曲面呢?

可以表示为下述坐标形式
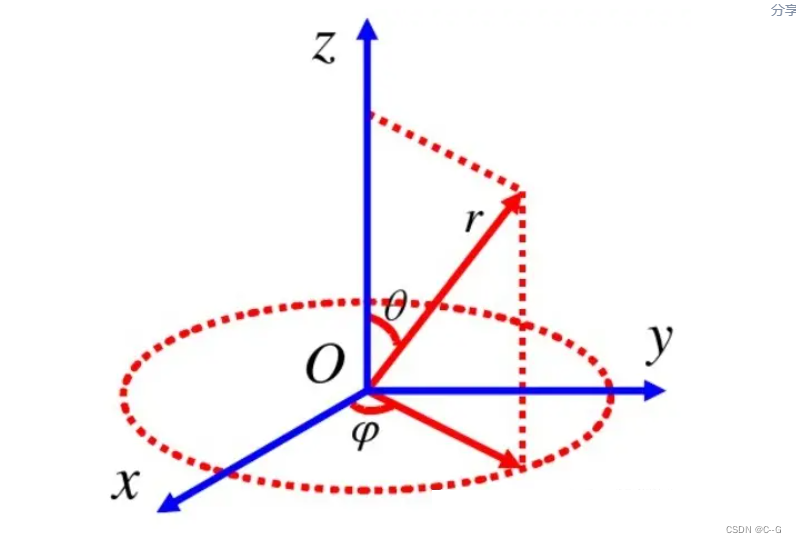
用球面函数表示方法来表示 f ( θ , ψ ) f(\theta,\psi) f(θ,ψ),这个函数也有自己基函数组成
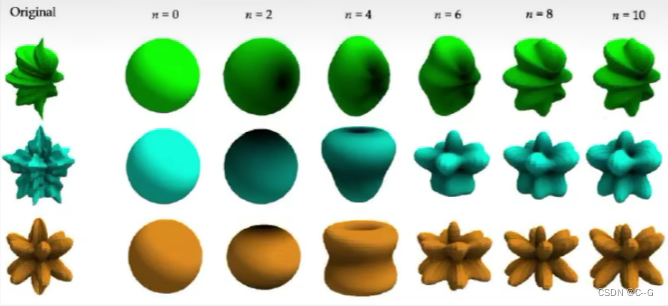
球面函数的基函数是
高斯分布
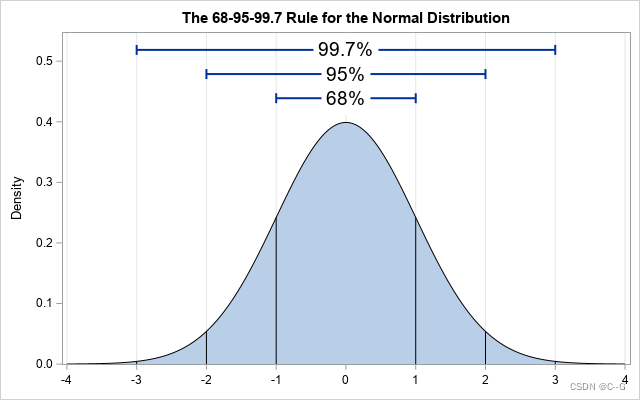
一维高斯分布
p ( x ) = 1 2 π σ e − ( x − μ ) 2 2 σ 2 \begin{align} p(x) = \frac{1}{\sqrt{2\pi}\sigma}e^{-\frac{(x-\mu)^2}{2\sigma^2}} \end{align} p(x)=2πσ1e−2σ2(x−μ)2
均值为 μ \mu μ,方差为 σ \sigma σ,数据以99%的概率落在 μ − 3 σ \begin{smallmatrix}\mu-3\sigma\end{smallmatrix} μ−3σ到 μ + 3 σ \begin{smallmatrix}\mu+3\sigma\end{smallmatrix} μ+3σ之间
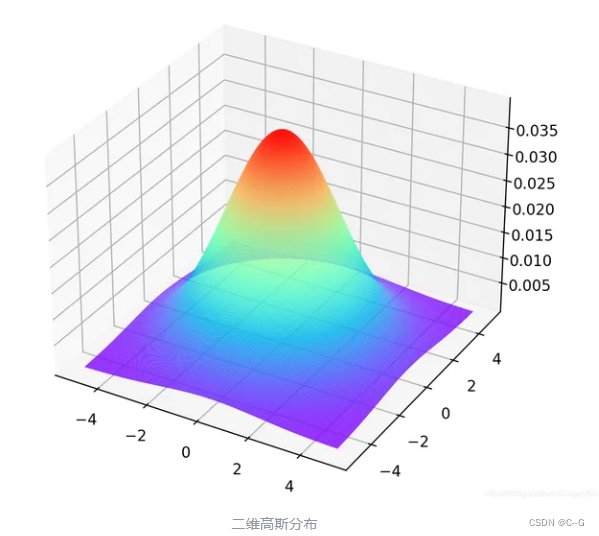
二维标准高斯分布( μ = 0 , σ = 1 \mu=0,\sigma=1 μ=0,σ=1)
因为是标准二维高斯分布,所以每个变量之间是独立的
p ( x , y ) = p ( x ) p ( y ) = 1 2 π e ( − x 2 + y 2 2 ) \begin{align} p(x,y)=p(x)p(y)=\frac{1}{2\pi}e^{(-\frac{x^2+y^2}{2})} \end{align} p(x,y)=p(x)p(y)=2π1e(−2x2+y2)
为了向量化公式,用向量 v = [ x y ] T \begin{smallmatrix}v=[x y]^T\end{smallmatrix} v=[xy]T表示
p ( v ) = 1 2 π e − 1 2 v T v \begin{align} p(v)=\frac{1}{2\pi}e^{-\frac{1}{2}v^Tv} \end{align} p(v)=2π1e−21vTv
这个时候,用 v = A ( x − μ ) \begin{smallmatrix}v=A(x-\mu)\end{smallmatrix} v=A(x−μ),其中的 A 为 V 中每个分量的线性组合系数,也就是说 A 表示了每个变量的线性关系
p ( v ) = ∣ A ∣ 2 π e − 1 2 ( x − μ ) T A T A ( x − μ ) \begin{align} p(v) = \frac{|A|}{2\pi}e^{-\frac{1}{2}(x-\mu)^TA^TA(x-\mu)} \end{align} p(v)=2π∣A∣e−21(x−μ)TATA(x−μ)
用 Σ = ( A T A ) − 1 \begin{smallmatrix}\Sigma=(A^TA)^{-1}\end{smallmatrix} Σ=(ATA)−1表示其协方差,其中 |A|为行列式
p ( v ) = 1 2 π ∣ Σ ∣ 1 2 e − 1 2 ( x − μ ) T Σ − 1 ( x − μ ) \begin{align} p(v) = \frac{1}{2\pi|\Sigma|^{\frac{1}{2}}} e^{-\frac{1}{2}(x-\mu)^T\Sigma^{-1}(x-\mu)} \end{align} p(v)=2π∣Σ∣211e−21(x−μ)TΣ−1(x−μ)
图像为
多维高斯分布
p ( x ) = 1 ( 2 π ) N 2 ∣ Σ ∣ e − 1 2 ( x − μ ) T Σ − 1 ( x − μ ) \begin{align} p(x) = \frac{1}{ (2\pi)^{\frac{N}{2}} |\Sigma| }e^{-\frac{1}{2}(x-\mu)^T\Sigma^{-1}(x-\mu)} \end{align} p(x)=(2π)2N∣Σ∣1e−21(x−μ)TΣ−1(x−μ)
假设一个向量 x 服从均值向量为 μ \mu μ 、协方差矩阵为 Σ \Sigma Σ 的多元正态分布,令 μ = 0 \begin{smallmatrix}\mu=0\end{smallmatrix} μ=0,由于指数项外面的系统 1 ( 2 π ) N 2 ∣ Σ ∣ \begin{smallmatrix}\frac{1}{ (2\pi)^{\frac{N}{2}} |\Sigma| }\end{smallmatrix} (2π)2N∣Σ∣1通常为常数,去掉后简化为:
p ( x ) ∝ e − 1 2 ( x − μ ) T Σ − 1 ( x − μ ) \begin{align} p(x) \propto e^{-\frac{1}{2}(x-\mu)^T\Sigma^{-1}(x-\mu)} \end{align} p(x)∝e−21(x−μ)TΣ−1(x−μ)
三维高斯的图像可以想象一个突起的小山坡
固定概率为 p 的三维高斯分布是什么样呢?
e − 1 2 ( x − μ ) T Σ − 1 ( x − μ ) = p ( x − μ ) T Σ ( x − μ ) = − 2 ln p \begin{align} e^{-\frac{1}{2}(x-\mu)^T\Sigma^-1(x-\mu)} &= p \\ \nonumber (x-\mu)^T\Sigma(x-\mu) &= -2\ln p \end{align} e−21(x−μ)TΣ−1(x−μ)(x−μ)TΣ(x−μ)=p=−2lnp
这里 − 2 ln p -2\ln p −2lnp是常数C, Σ \Sigma Σ是实对称矩阵,令 Σ = P T Λ P \begin{smallmatrix}\Sigma=P^T \Lambda P\end{smallmatrix} Σ=PTΛP
( x − μ ) T P T Λ P ( x − μ ) = C ( P ( x − μ ) ) T Λ P ( x − μ ) = C \begin{align} (x-\mu)^TP^T\Lambda P(x-\mu) &= C \\ \nonumber (P(x-\mu))^T \Lambda P(x-\mu) &= C \end{align} (x−μ)TPTΛP(x−μ)(P(x−μ))TΛP(x−μ)=C=C
y = P ( x − μ ) y=P(x-\mu) y=P(x−μ),令
Λ = [ σ 1 2 0 0 0 σ 2 2 0 0 0 σ 3 2 ] \begin{align} \Lambda= \begin{bmatrix} {\sigma^2_1}&{0}&{0}\\ {0}&{\sigma^2_2}&{0}\\ {0}&{0}&{\sigma^2_3} \end{bmatrix} \end{align} Λ= σ12000σ22000σ32
原子式变为
C = y T Λ y = σ 1 2 y 1 2 + σ 2 2 y 2 2 + σ 3 2 y 3 2 C=y^T\Lambda y = \sigma^2_1y^2_1 + \sigma^2_2y^2_2 + \sigma^2_3y^2_3 C=yTΛy=σ12y12+σ22y22+σ32y32
该公式是标准的椭球方程,所以原子式就是把标准椭球经过旋转变换 P − 1 P^{-1} P−1,再挪到 μ \mu μ点得到。所以对于一个三维高斯而言,同一个椭球表面其概率密度相同,离 μ \mu μ越远,其概率越小。
一个多元高斯轴的长度为 Σ \Sigma Σ的特征值。
和一维一样,有99%的概率落在 3 σ 1 3\sigma_1 3σ1, 3 σ 2 3\sigma_2 3σ2, 3 σ 3 3\sigma_3 3σ3所在的椭球内, σ 1 , σ 2 , σ 3 \sigma_1,\sigma_2,\sigma_3 σ1,σ2,σ3为 Σ \Sigma Σ的特征值
高斯分布的性质
- 高斯函数的傅里叶变换还是高斯函数
- 高斯函数与高斯函数的卷积仍是高斯函数
- 高斯分布经仿射变换后仍是高斯分布
- 多元高斯分布的边缘分布仍是高斯分布
图形学渲染——坐标变换
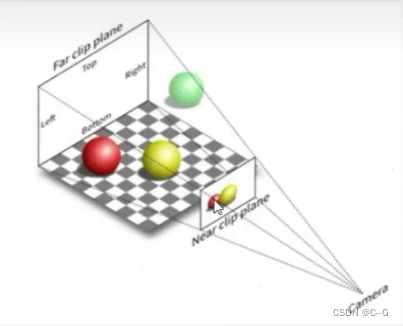
传统图形学的渲染管道里,需要把空间的物体投影到相机平面,也就是需要指导空间每个点到特点相机平面上的位置是多少,传统图形学的流程是:
先把视锥内物体进行一个透视投影,压缩到一个非透视的空间内,然后使用正交投影,将视锥内物体压缩到各维度为[-1,1]的空间内
透视投影就是最类似人眼所看东西的方式,遵循近大远小,如果说正交投影都是水平光线,那么透视投影则显然不是了(左透视,右正交)
透视投影

此时,投影过程可用下图解释,将 (x,y,z)一点投影至投影屏幕之后,他的坐标变为( x′ , y′ , z′ )

图中原点代表视点,z = -n 代表投影平面,利用相似三角形性质不难得出图中投影之后的坐标
那么利用齐次坐标的性质,希望找到一个矩阵完成如下变换

如果形象化的描述一下的话,就是利用这个变换矩阵将整个空间压缩了一下,使其对应了真正透视投影的坐标,最后不要忘了要利用正交转换到 [ − 1 , 1 ] 3 [-1,1]^3 [−1,1]3的空间之内
首先,这个矩阵的前两行和最后一行是能很快确定出来的,根据最后的齐次坐标,如下:

那么如何确定第三行呢,这里就要运用透视投影的一个性质:
可视空间,前后面变换之后 z 坐标不变





得最后变换矩阵为

正交投影

正交投影是相对简单的一种,坐标的相对位置都不会改变,所有光线都是平行传播,只需将物体(可视部分,即上图的那个长方体)全部转换到一个 [ − 1 , 1 ] 3 [-1,1]^3 [−1,1]3的空间之中即可(其中x,y坐标便是投影结果,保留z是为了之后的遮挡检测),这只是为了之后的计算更加的方便而已,在转换到屏幕坐标的时候就会重新拉伸回来,所有物体的相对大小位置都不会有任何变化


总的变换公式为

3D Gaussian Splatting
空间点
和particle-based rendering一样,因为点没有体积,所以需要对它进行一个扩展,扩展方式与传统的particle-based rendering 不同,它用3D Gaussian表示
高斯分布由在世界空间中定义的全三维协方差矩阵 Σ \Sigma Σ定义,以点(mean)为中心
G ( x ) = e − 1 2 ( x ) T Σ − 1 ( x ) \begin{align} G(x) = e^{-\frac{1}{2}(x)^T\Sigma^{-1}(x)} \end{align} G(x)=e−21(x)TΣ−1(x)
这和前面说的3D Gaussian表示一样,省去了常数项,这种表示具有更强的灵活性,用更少的点表示更复杂的形状
3D 高斯的属性包括:
- 每个点的坐标(中心位置, μ \mu μ)
- 每个点的高斯表示中的 Σ \Sigma Σ
- 每个点的颜色
- 每个点的不透明度 α \alpha α
Σ \Sigma Σ(协方差矩阵)
正定矩阵:
若所有特征值均大于零,则称为正定
A 是 n 阶方阵,如果对任何非零向量 x,都有 x T A x > 0 x^TAx>0 xTAx>0, x T x^T xT表示x的转置,则A为正定矩阵。
半正定矩阵:
若所有特征值均不小于零,则称为半正定
A 是 实对称矩阵,如果对任何实非零列向量 x,都有 x T A x > 0 x^TAx>0 xTAx>0, x T x^T xT表示x的转置,则A为正定矩阵
这里的 Σ \Sigma Σ(协方差矩阵)是一个半正定矩阵,要保证这个半正定条件,所以不能对其随机初始化,假定:
Σ = R Λ R T = R Λ 1 2 Λ 1 2 R T = ( R Λ 1 2 ) ( R Λ 1 2 ) T \begin{align} \Sigma &= R\Lambda R^T \\ \nonumber &=R\Lambda^{\frac{1}{2}}\Lambda^{\frac{1}{2}}R^T \\ &= (R\Lambda^{\frac{1}{2}})(R\Lambda^{\frac{1}{2}})^T \end{align} Σ=RΛRT=RΛ21Λ21RT=(RΛ21)(RΛ21)T
其中R是一个正交矩阵,可以理解为旋转矩阵, Λ 1 2 \Lambda^{\frac{1}{2}} Λ21是一个全为正数的对角矩阵,可以理解为缩放矩阵,论文的表示为:
Σ = R S S T R T \begin{align} \Sigma=RSS^TR^T \end{align} Σ=RSSTRT
点的颜色 c
为了模拟高光的点,会加入方向向量,使得从不同方向得到不同的颜色,这里使用球谐函数表示。
渲染公式
NeRF体渲染公式
C = ∑ i = 1 N T i ( 1 − e − σ i δ i ) c i w i t h T i = e − ∑ j = 1 i − 1 σ j δ j \begin{align} C &= \sum^N_{i=1}T_i(1-e^{-\sigma_i\delta_i})c_i \ with \\ \nonumber T_i &= e^{-\sum^{i-1}_{j=1}\sigma_j\delta_j} \end{align} CTi=i=1∑NTi(1−e−σiδi)ci with=e−∑j=1i−1σjδj
同样的这里也使用类似的方式
C = ∑ i ∈ N c i α i ∏ j = 1 i − 1 ( 1 − α i ) \begin{align} C = \sum_{i\in N} c_i\alpha_i \prod^{i-1}_{j=1}(1-\alpha_i) \end{align} C=i∈N∑ciαij=1∏i−1(1−αi)
c i c_i ci是每个点的颜色, α i \alpha_i αi是通过对协方差 Σ \Sigma Σ乘以每个点不透明度的二维高斯函数进行评估得到
投影(泼溅splatting)
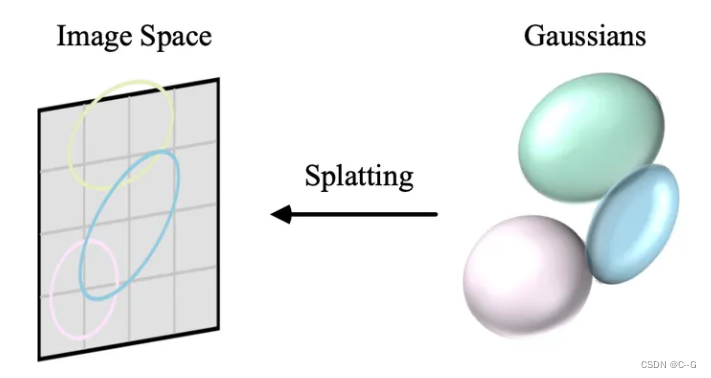
现在,空间点是3D高斯(椭球),携带了中心位置 μ \mu μ、不透明度 σ \sigma σ、3D协方差矩阵 Σ \Sigma Σ和颜色 c ,渲染方程也如上表述。那么现在就是将3D高斯(椭球)投影到2D图像空间(椭圆)进行渲染。
透视投影
给定视图变化 W ,3D协方差矩阵 Σ \Sigma Σ 从世界坐标转换到相机坐标的公式如下:
Σ c ′ = W Σ W T \begin{align} \Sigma^\prime_c = W \Sigma W^T \end{align} Σc′=WΣWT
正交投影
如上述知识补充,我们可以直接用正交投影获得相机平面投影,但是,原始正交头像不考虑z坐标,而渲染公式中需要3D高斯(椭球)的先后顺序(深度),为此,对正交投影进行修改。
假设相机坐标 ( t 1 , t 2 , t 3 ) (t_1,t_2,t_3) (t1,t2,t3),对其进行压缩到 ( x 1 , x 2 , x 3 ) (x_1,x_2,x_3) (x1,x2,x3),公式为:
x 1 = t 1 t 3 x 2 = t 2 t 3 x 3 = t 1 2 + t 2 2 + t 3 2 \begin{align} x_1&=\frac{t_1}{t_3} \\ \nonumber x_2&=\frac{t_2}{t_3} \\ \nonumber x_3&=\sqrt{t^2_1+t^2_2+t^2_3} \end{align} x1x2x3=t3t1=t3t2=t12+t22+t32
x 3 x_3 x3的设计是非线性变换,无法通过求解一个变换矩阵求解出来,但是可以用一个线性变换对这个非线性变换进行近似,如泰勒展示式那样:
f ( x ) ≈ f ( x 0 ) + f ′ ( x 0 ) ( x − x 0 ) \begin{align} f(x) \approx f(x_0)+f^\prime(x_0)(x-x_0) \end{align} f(x)≈f(x0)+f′(x0)(x−x0)
f ( x ) f(x) f(x)的情况就是为 R → R R \to R R→R的情况,为了把拓展为高维的 R m → R n R^m \to R^n Rm→Rn,使用雅可比矩阵:
f ( x ) ≈ f ( x 0 ) + J ( x − x 0 ) \begin{align} f(x) \approx f(x_0) + J(x-x_0) \end{align} f(x)≈f(x0)+J(x−x0)
J是雅可比矩阵,可以看作一阶导的多维形式,假设输入为: x 1 , x 2 , ⋯ , x m x_1,x_2,\cdots,x_m x1,x2,⋯,xm,输出为: y 1 , y 2 , ⋯ , y n y_1,y_2,\cdots,y_n y1,y2,⋯,yn:
J = [ ∂ y 1 x 1 ∂ y 1 x 2 ⋯ ∂ y 1 x m ∂ y 2 x 1 ∂ y 2 x 2 ⋯ ∂ y 2 x m ⋮ ⋮ ⋱ ⋮ ∂ y n x 1 ∂ y n x 2 ⋯ ∂ y n x m ] \begin{align} J = \begin{bmatrix} { \frac{\partial y_1}{x_1} } & { \frac{\partial y_1}{x_2} } & {\cdots} & {\frac{\partial y_1}{x_m}} \\ { \frac{\partial y_2}{x_1} } & { \frac{\partial y_2}{x_2} } & {\cdots} & {\frac{\partial y_2}{x_m}} \\ {\vdots}&{\vdots}&{\ddots}&{\vdots} \\ { \frac{\partial y_n}{x_1} } & { \frac{\partial y_n}{x_2} } & {\cdots} & {\frac{\partial y_n}{x_m}} \\ \end{bmatrix} \end{align} J= x1∂y1x1∂y2⋮x1∂ynx2∂y1x2∂y2⋮x2∂yn⋯⋯⋱⋯xm∂y1xm∂y2⋮xm∂yn
那么前面的非线性变换可以使用下述公式进行近视,其雅可比矩阵为:
[ 1 t 3 0 − t 1 t 3 0 1 t 3 − t 2 t 3 t 1 t 1 2 + t 2 2 + t 3 2 t 2 t 1 2 + t 2 2 + t 3 2 t 3 t 1 2 + t 2 2 + t 3 2 ] \begin{align} \begin{bmatrix} {\frac{1}{t_3}} & {0} &{-\frac{t_1}{t_3}} \\ {0} & {\frac{1}{t_3}} &{-\frac{t_2}{t_3}} \\ {\frac{t_1}{\sqrt{t^2_1+t^2_2+t^2_3} } } & {\frac{t_2}{\sqrt{t^2_1+t^2_2+t^2_3} } } & {\frac{t_3}{\sqrt{t^2_1+t^2_2+t^2_3} } } \end{bmatrix} \end{align} t310t12+t22+t32t10t31t12+t22+t32t2−t3t1−t3t2t12+t22+t32t3
对每个高斯在其中心点展开,得到其雅可比矩阵,就可以得到这个高斯的线性变换矩阵。根据高斯分布的性质(高斯分布经仿射变换后仍是高斯分布),如果一个线性变换 A x + b \begin{smallmatrix}Ax+b\end{smallmatrix} Ax+b,高斯分布经过这个变换之后:
μ ′ = A μ + b \begin{align} \mu^\prime = A\mu+b \end{align} μ′=Aμ+b
等同于对线性矩阵 Σ \Sigma Σ进行下面操作:
Σ ′ = A Σ A T \begin{align} \Sigma^\prime = A\Sigma A^T \end{align} Σ′=AΣAT
给定视图变化W,3D高斯(椭球)从世界坐标到相机坐标再到相机平面的变换公式为:
Σ ′ = J W Σ W T J T \begin{align} \Sigma^\prime = JW\Sigma W^TJ^T \end{align} Σ′=JWΣWTJT
J为雅可比矩阵,最终就得到了3D高斯投影到相机平面的椭圆
相机平面是2D的,z坐标是用来评估3D高斯先后顺序(深度)的,当丢弃 Σ ′ \Sigma^\prime Σ′的第三行和第三列(z坐标)就是投影到相机平面的协方差矩阵了。
像素点着色
要计算像素点的着色,首先需要知道哪些高斯投影到这个像素点上。投影部分已经知道3D高斯经过仿射变换后投影到平面的高斯,也知道了99%的概率会落在 3 σ 1 , 3 σ 2 3\sigma_1,3\sigma_2 3σ1,3σ2之内,为了简化计算,将范围扩大为 ( m a x ( 3 σ 1 , 3 σ 2 ) , m a x ( 3 σ 1 , 3 σ 2 ) ) (max(3\sigma_1,3\sigma_2),max(3\sigma_1,3\sigma_2)) (max(3σ1,3σ2),max(3σ1,3σ2)).
titles(图像块)
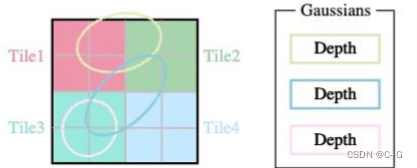
为了避免为每个像素计算有序列表的计算成本,3D GS将精度从像素级别转移到块级别细节。3D GS 将图像划分为多个不重叠的图像块(titles),每个块包含 16 × 16 16\times16 16×16像素。进一步确定哪些图像块与投影的高斯(椭圆)相交。
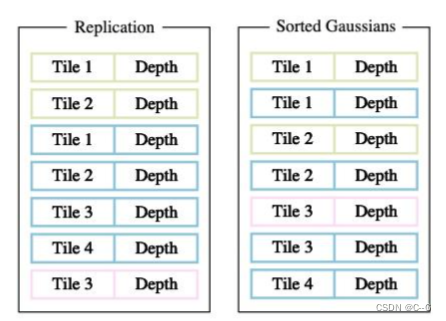
一个投影的高斯可能覆盖多个块,一种合理的方法是复制高斯,为每个副本分配一个标识符(即块ID)
3D GS 会将各自的块 ID 与每个高斯视图变换得到的深度值结合起来。这样就得到了一个未排序的字节列表,其中高位代表块 ID,低位表示深度。这样,使用快速排序后的列表就可以直接用于渲染公式。
每个块和像素的渲染都是独立进行的,因此这一过程非常适合并行计算。另外一个好处是,每个块的像素都可以访问一个公共的共享内存,并保持一个统一的读取序列,从而提高渲染的并行执行效率。在原论文的官方实现中,该框架将块和像素的处理分别视为类似于 CUDA 编程架构中的block和thread。
Adaptive Control
3D GS 是从 structure-from-motion (SfM) 或随机初始化的初始稀疏点集开始的。然后,采用点密集化和剪枝来控制场景中 3D 高斯的密度。
为了稳定,在较低分辨率下“预热”计算。具体来说,使用4倍小的图像分辨率开始优化,并在250次和500次迭代后进行两次上采样。
每100次迭代进行一次密集化,根据当前情况对高斯进行去除或增加
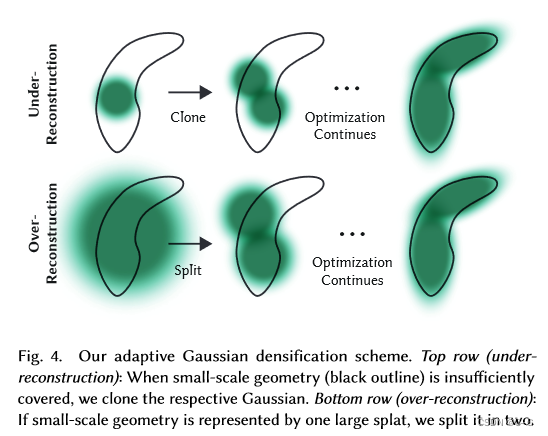
密集化:某些地方的高斯不足。坐标梯度较大(大于阈值 τ p o s \tau_{pos} τpos 0.0002)的地方就表示这里高斯不合适。这涉及到在重建不足的区域克隆小高斯,或者在重建过度的区域拆分大高斯。克隆时,创建一个高斯的副本,并向位置梯度移动。对于分割,则是用两个较小的高斯替换一个较大的高斯,将其比例缩小一个特定的系数。这一步骤旨在优化高斯在三维空间中的分布和表现,从而提高重建的整体质量
剪枝:当透明度非常低 α \alpha α低于某个阈值或者离相机距离非常近(可能是floater)则去掉。这在某种程度上可以看作是一个正则化过程。这样就能有控制地增加必要的高斯密度,同时剔除多余的高斯。这一过程不仅有助于节省计算资源,还能确保模型中的高斯保持精确,从而有效地表现场景。
参数优化
使用sigmoid激活函数将 α \alpha α约束在[0−1)范围内并获得平滑梯度,指数激活函数用于协方差的尺度。
3D GS 的损失函数与 NeRF 的略有不同。由于射线步进计算成本高昂,NeRFs通常在像素级别而不是图像级别进行 loss 的计算。
L = ( 1 − λ ) L 1 + λ L D − S S I M \begin{align} \mathcal{L} = (1-\lambda)\mathcal{L}_1 + \lambda\mathcal{L}_{D-SSIM} \end{align} L=(1−λ)L1+λLD−SSIM
λ = 0.2 \lambda=0.2 λ=0.2
SH系数优化对缺乏角度信息很敏感。对于典型的“类似nerf”的捕捉,即通过在其周围的整个半球拍摄的照片来观察中心物体,优化效果很好。然而,如果捕获有角度区域缺失(例如,当捕获场景的角落时,或执行“由内到外”),则可以通过优化产生SH的零阶分量(即基本色或漫反射色)的完全不正确的值。为了克服这个问题,首先只优化零阶分量,然后在每1000次迭代之后引入SH的一个波段,直到表示所有SH的4个波段。
3D高斯的大多数属性可以通过反向传播直接优化。需要注意的是,直接优化协方差矩阵 Σ \Sigma Σ 可能得到非半正定矩阵,这不符合通常与协方差矩阵相关联的物理解释。为了避免这个问题,3D GS 选择优化一个四元数 q 和一个三维向量 s。q 和 s 分别表示旋转和缩放。这样可以显式的将待优化的参数从9个变为4个。
q = q r + q i ⋅ i + q j ⋅ j + q k ⋅ k \begin{align} q = q_r+q_i\cdot i+q_j\cdot j+q_k\cdot k \end{align} q=qr+qi⋅i+qj⋅j+qk⋅k
为了避免自动微分的成本,3D GS 推导了 q 和 s 的梯度,以便在优化过程中直接计算它们。推导过程可参考 3D GS 原论文的附录A
相关文章:
108、3D Gaussian Splatting for Real-Time Radiance Field Rendering
简介 官网 更少训练时间的同时实现最先进的视觉质量,能在1080p分辨率下实现高质量的实时(≥30 fps)新视图合成 NeRF使用隐式场景表示,体素,点云等属于显示建模方法,3DGS就是显示辐射场。它用3D高斯作为灵活高效的表示方法&…...

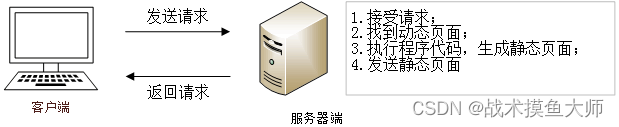
PHP之CURL和Socket
文章目录 一、CURL1.基本流程(1)初始化(2)向服务器发送请求(3)向服务器发送请求(4)关闭curl 2.CURLOPT参数记得写一个文件curl上传的例子记得写一个json上传的例子3.CURL批处理 二、…...
【Web】NKCTF 2024 个人wp(部分)
目录 my first cms 全世界最简单的CTF attack_tacooooo 属实太菜了,3/4 my first cms 一眼搜版本2.2.19 CVE -CVE-2024-27622 GitHub - capture0x/CMSMadeSimple 访问/admin/login.php 爆出弱口令,后台登录 admin Admin123 Extensions > User D…...
QT常见布局器使用
布局简介 为什么要布局?通过布局拖动不影响鼠标拖动窗口的效果等优点.QT设计器布局比较固定,不方便后期修改和维护;在Qt里面布局分为四个大类 : 盒子布局:QBoxLayout 网格布局:QGridLayout 表单布局&am…...
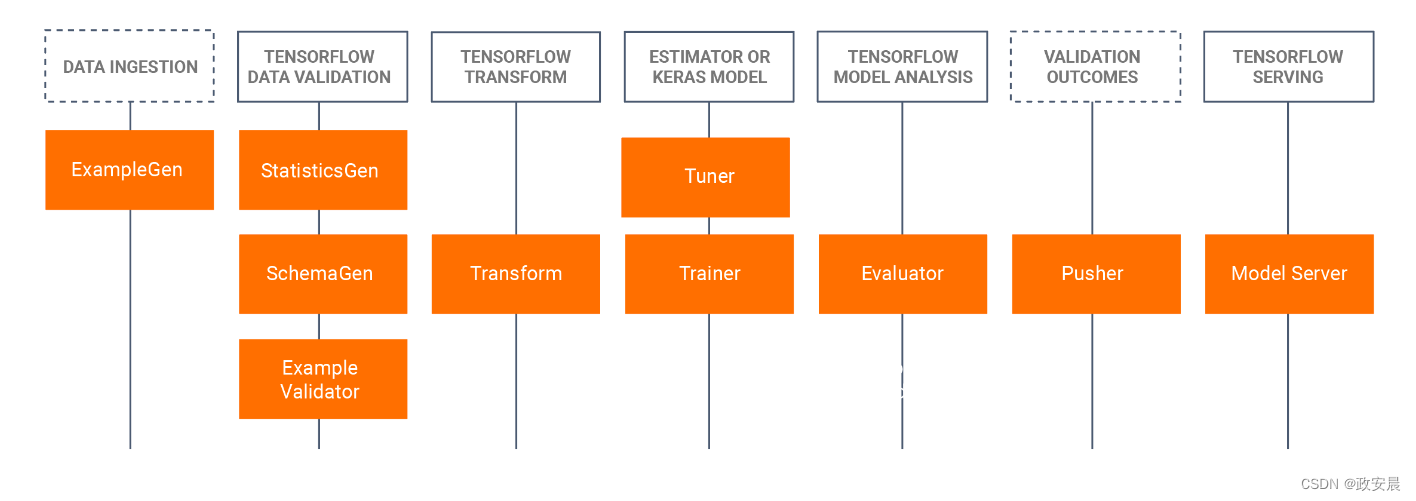
政安晨:【深度学习部署】—— TensorFlow Extended(TFX)介绍
政安晨的个人主页:政安晨 欢迎 👍点赞✍评论⭐收藏 收录专栏: TensorFlow与Keras实战演绎机器学习 希望政安晨的博客能够对您有所裨益,如有不足之处,欢迎在评论区提出指正! 前言 TensorFlow Extended(TFX&a…...

宝石与石头
宝石与石头 链接:https://leetcode.cn/problems/jewels-and-stones/description/ 给你⼀个字符串 jewels 代表石头中宝石的类型,另有⼀个字符串 stones 代表你拥有的石头。 stones 中每个字符代表了⼀种你拥有的石头的类型,你想知道你拥有的石头中有多…...
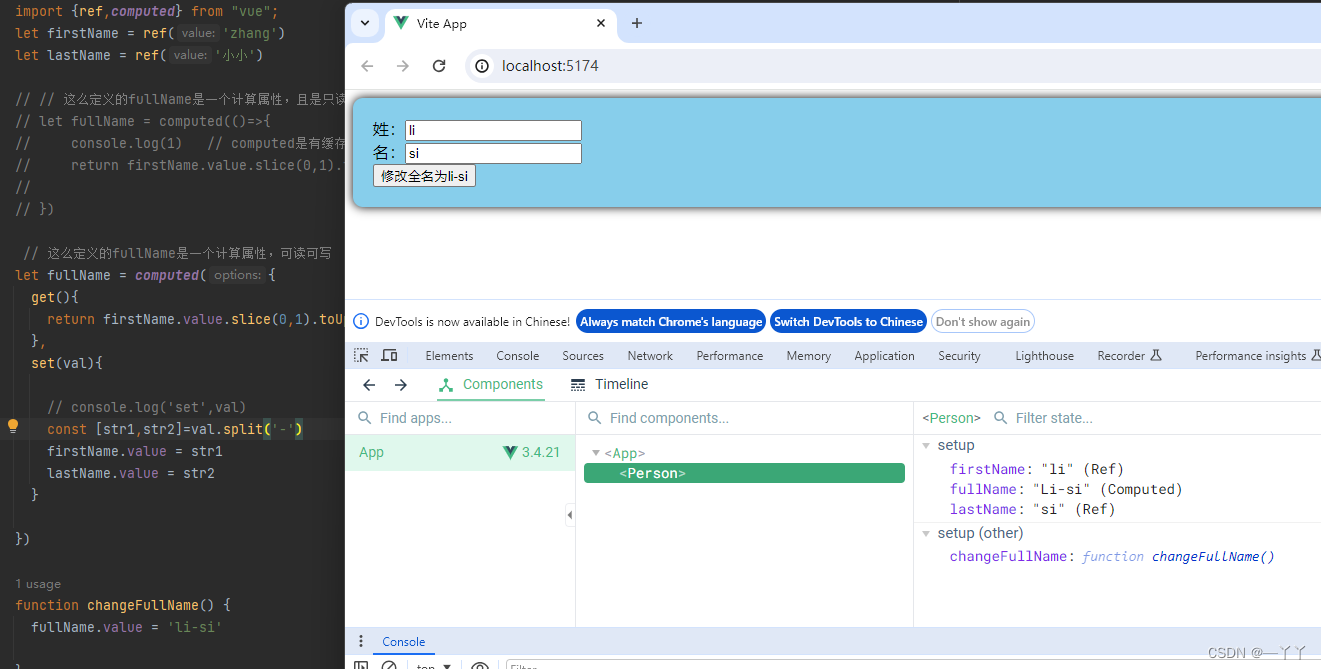
【Vue3之computed属性(四)】
文章目录 前言一、computed属性有缓存二、使用方法三、修改全名 前言 理解computed属性,实现输入姓和名得出全名并双向绑定,区分单向绑定和双向绑定。测试computed属性和方法的区别 一、computed属性有缓存 先引入computed,写箭头函数定义并…...

生产力工具|安装更新R软件(R、studio)
内容介绍: 安装R软件: 下载 R X64 3.5.1: 访问官方R网站 https://cran.r-project.org/。选择适合Windows版本的安装包。将安装包下载到您的计算机。 本地安装: 运行下载的“R-3.5.1-win.exe”文件。按照安装向导,选择安装路径,取消…...
ffmpeg实现媒体流解码
本期主要讲解怎么将MP4媒体流的视频解码为yuv,音频解码为pcm数据;在此之前我们要先了解解复用和复用的概念; 解复用:像mp4是由音频和视频组成的(其他内容流除外);将MP4的流拆分成视频流(h264或h265等)和音频流(AAC或mp3等); 复用:就是将音频和视频打包成MP4或者fl…...
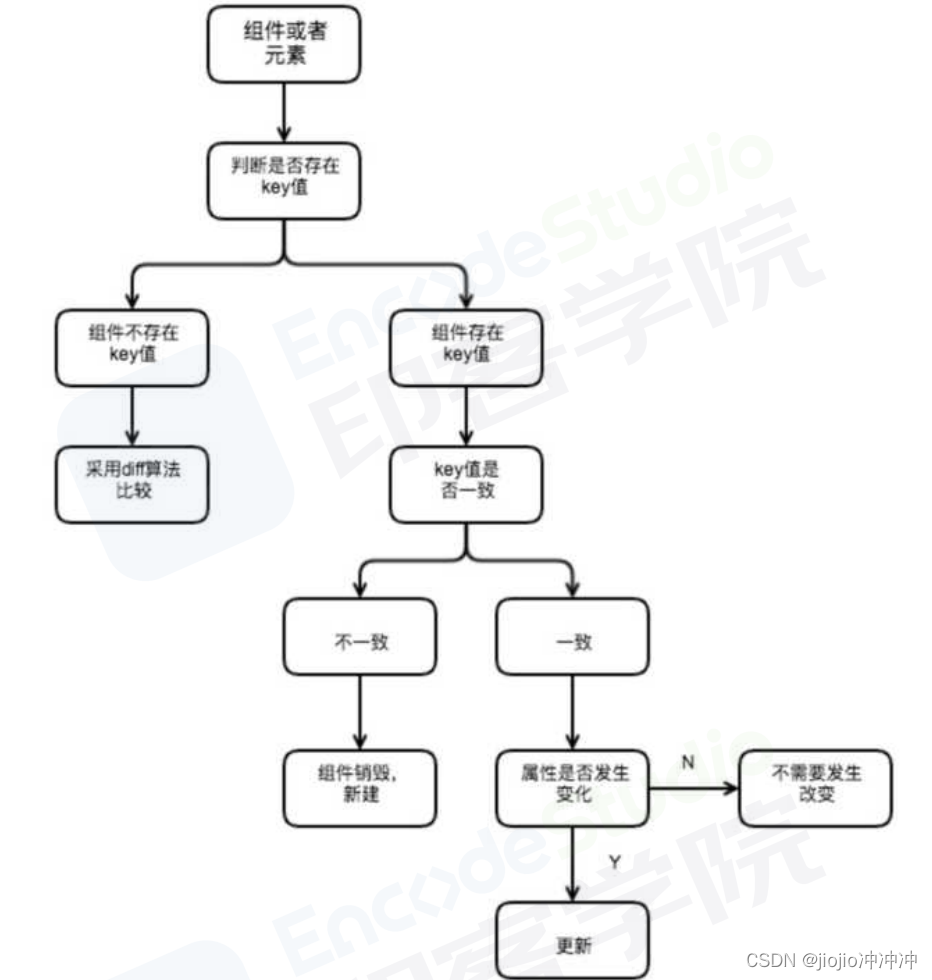
面试题 之 react
1.说说对react的理解 1️⃣是什么 React是用于构建用户界面的 JavaScript 库,遵循组件设计模式、声明式编程范式和函数式编程概念,更高效使用虚拟 DOM 来有效地操作 DOM ,遵循从高阶组件到低阶组件的单向数据流。 react 类组件使用一个名为 render() 的方…...

k8s笔记27--快速了解 k8s pod和cgroup的关系
k8s笔记27--快速了解 k8s pod和 cgroup 的关系 介绍pod & cgroup注意事项说明 介绍 随着云计算、云原生技术的成熟和广泛应用,K8S已经成为容器编排的事实标准,学习了解容器、K8S技术对于新时代的IT从业者显得极其重要了。 之前在文章 docker笔记13–…...
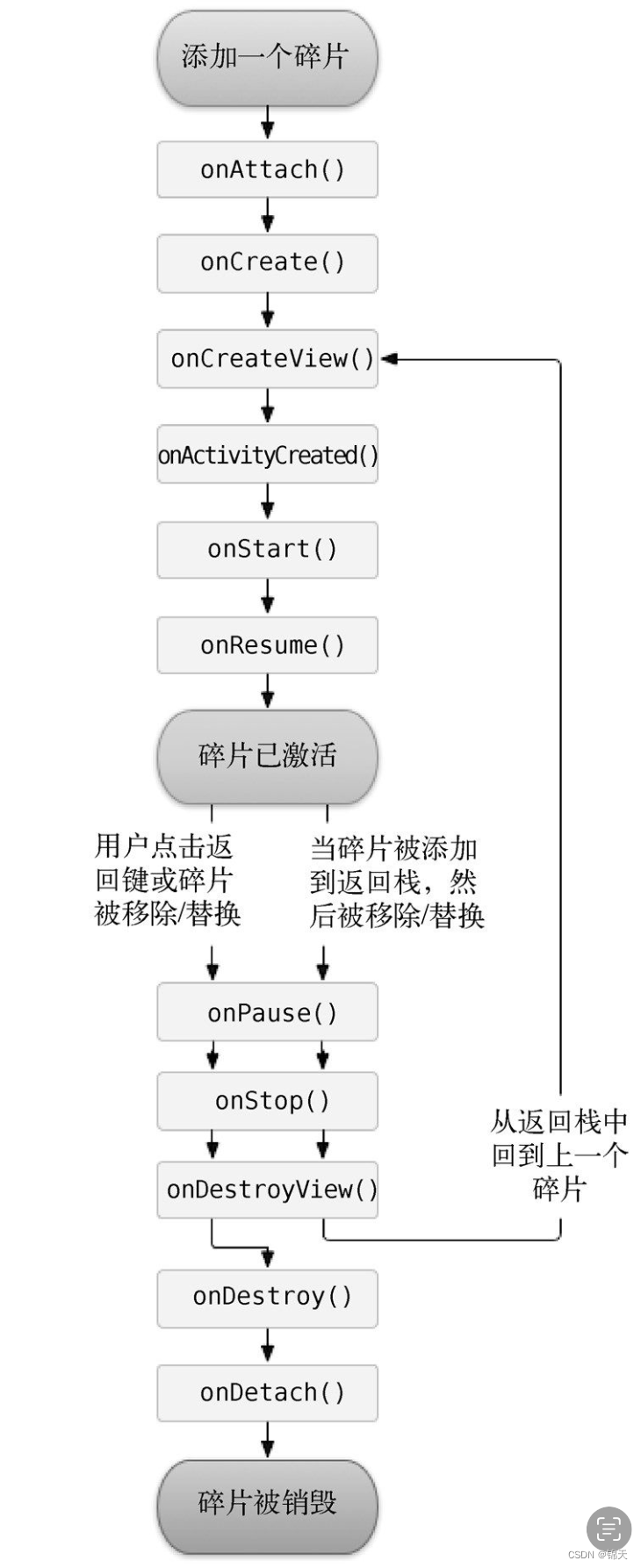
android Fragment 生命周期 方法调用顺序
文章目录 Introlog 及结论代码 Intro 界面设计:点击左侧按钮,会将右侧 青色的RightFragment 替换成 黄色的AnotherRightFragment,而这两个 Fragment 的生命周期方法都会打印日志。 所以只要看执行结果中的日志,就可以知道 Fragme…...
python写爬虫爬取京东商品信息
工具库 爬虫有两种方案: 第一种方式是使用request模拟请求,并使用bs4解析respond得到数据。第二种是使用selenium和无头浏览器,selenium自动化操作无头浏览器,由无头浏览器实现请求,对得到的数据进行解析。 第一种方…...

使用Linux别名简化命令输入
Linux定义命令别名,解决经常重复输入长命令 在Linux环境下工作时,我们经常需要输入长长的命令,这不仅耗时而且容易出错。Linux提供了一种名为“别名(alias)”的功能,可以让我们为这些长命令定义简短的名称…...
34.网络游戏逆向分析与漏洞攻防-游戏网络通信数据解析-登录数据包的监视与模拟
免责声明:内容仅供学习参考,请合法利用知识,禁止进行违法犯罪活动! 如果看不懂、不知道现在做的什么,那就跟着做完看效果 内容参考于:易道云信息技术研究院VIP课 上一个内容:33.游戏登录数据…...

rust - 对文件夹进行zip压缩加密
本文提供了一种对文件夹进行zip压缩并加密的方法。 添加依赖 cargo add anyhow cargo add walkdir cargo add zip cargo add zip-extensions计算文件夹的大小 目的是对需要压缩的文件夹的大小做一个限制。当然如果资源足够的话,可以去掉此限制。 let mut total_s…...
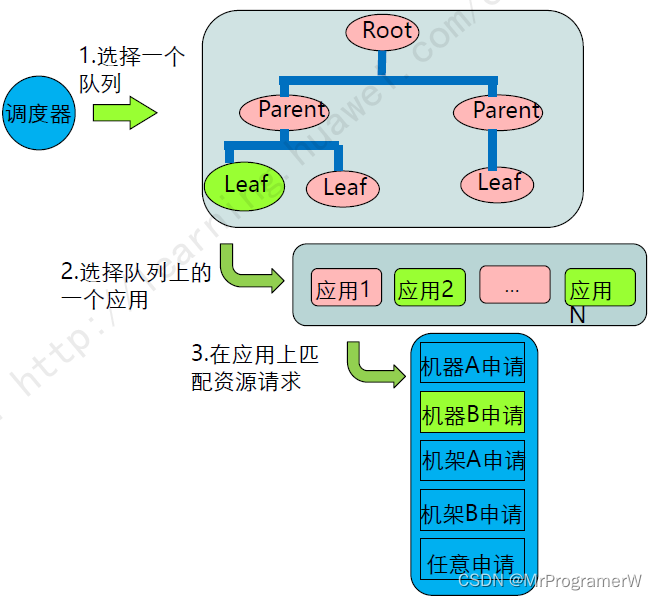
ETL数据倾斜与资源优化
1.数据倾斜实例 数据倾斜在MapReduce编程模型中比较常见,由于key值分布不均,大量的相同key被存储分配到一个分区里,出现只有少量的机器在计算,其他机器等待的情况。主要分为JOIN数据倾斜和GROUP BY数据倾斜。 1.1GROUP BY数据倾…...

Python的asyncio:异步编程的利器
在Python中,asyncio模块为开发者提供了强大的异步编程支持,使得编写高效且并发的代码变得更加容易。本文将深入探讨asyncio的核心概念、工作原理以及如何快速入门,通过文字与代码结合,带您领略异步编程的魅力。 1. 协程与事件循环…...

nodejs+vue高校奖助学金系统python-flask-django-php
高校奖助学金系统的目的是让使用者可以更方便的将人、设备和场景更立体的连接在一起。能让用户以更科幻的方式使用产品,体验高科技时代带给人们的方便,同时也能让用户体会到与以往常规产品不同的体验风格。 与安卓,iOS相比较起来,…...

已解决redis.clients.jedis.exceptions.JedisMovedDataException异常的正确解决方法,亲测有效!!!
已解决redis.clients.jedis.exceptions.JedisMovedDataException异常的正确解决方法,亲测有效!!! 目录 问题分析 报错原因 解决思路 解决方法 使用JedisCluster自动处理MOVED错误 手动更新客户端缓存 总结 博主vÿ…...

PA100K数据集实战:从下载到结构化解析全流程
1. PA100K数据集初探:为什么选择它?如果你正在研究行人属性识别,PA100K绝对是个绕不开的宝藏数据集。这个数据集包含了10万张真实监控场景下的行人图像,每张图都标注了26种常见属性——从衣着风格(比如是否穿T恤、裙子…...

DMA-330地址空间限制与扩展方案解析
1. DMA-330地址空间限制解析DMA-330作为Arm CoreLink系列中的直接内存访问控制器,其物理寻址能力直接由AxADDR信号宽度决定。这个32位地址总线宽度意味着它原生仅支持4GB(2^32字节)的物理地址空间访问。在实际嵌入式系统设计中,这…...

2026年,本地精准营销高性价比服务商来袭,你还不了解一下?
在本地商业竞争日益激烈的2026年,实体店面临着诸多挑战,引流难、成本高、复购率低等问题困扰着众多商家。而中粤(广州)信息科技有限公司作为本地精准营销的高性价比服务商,正以其独特的优势和卓越的服务,为…...

森优时铁锌维发根养黑用三个月真实效果实测:内服营养养黑的客观测评
"森优时铁锌维发根养黑用三个月真实效果实测显示,针对压力、熬夜引发的早白问题,通过内服补充毛囊所需营养的方式,多数使用者能感受到发根韧性提升、新生发色素沉淀改善,整体改善效果因人而异,合规的营养补充是目…...
)
ROS Noetic实战:从bag包里‘抠’出雷达点云和IMU数据的保姆级教程(Ubuntu 20.04)
ROS Noetic实战:从bag包里提取雷达点云和IMU数据的完整指南(Ubuntu 20.04)在机器人开发中,ROS bag文件就像是一个装满珍贵数据的宝箱,而雷达点云和IMU数据则是其中最闪亮的宝石。作为一名长期与ROS打交道的开发者&…...

基于ESP32的AIS转WiFi转换器:实现NMEA 0183数据无线传输
1. 项目概述:从VHF-AIS接收器到iPad的无线桥梁作为一名经常在海上折腾电子设备的航海爱好者,我最近遇到了一个挺实际的需求:我的主力导航设备是iPad上的iSailor应用,它功能强大、界面友好,但有个“硬伤”——它需要通过…...

WebSocket实时通信架构进阶:Room、命名空间与集群部署
WebSocket实时通信架构进阶:Room、命名空间与集群部署 作者:Crown_22 | AI Agent & Hermes Agent 桌面程序开发者 前言 WebSocket已经成为实时应用的标准技术,但大多数教程只停留在"建立连接、发送消息"的基础阶段。在生产环境中,你需要处理Room管理、命名空…...

基于ESP8266与MQTT的家庭水压自动控制系统设计与实现
1. 项目概述与核心需求解析家里水压不稳、供水时断时续,这大概是很多朋友都遇到过的烦心事。我所在的城市供水情况就很不理想,为了解决这个问题,我不得不自己动手,搭建了一套基于ESP8266微控制器的家庭水压增压与储水自动控制系统…...

BiliBiliCCSubtitle终极指南:5个实战技巧高效下载B站字幕
BiliBiliCCSubtitle终极指南:5个实战技巧高效下载B站字幕 【免费下载链接】BiliBiliCCSubtitle 一个用于下载B站(哔哩哔哩)CC字幕及转换的工具; 项目地址: https://gitcode.com/gh_mirrors/bi/BiliBiliCCSubtitle 还在为无法保存B站视频字幕而烦恼࿱…...

猫抓浏览器扩展终极指南:5分钟掌握全网视频资源下载技巧
猫抓浏览器扩展终极指南:5分钟掌握全网视频资源下载技巧 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 你是否经常遇到心仪的视频无法…...