openpnnp - 载入板子后,要确定板子的放置角度
文章目录
- openpnnp - 载入板子后,要确定板子的放置角度
- 概述
- 用openpnp提供的功能来确定被夹住的板子的左下角原点位置和板子的角度
- 备注
- END
openpnnp - 载入板子后,要确定板子的放置角度
概述
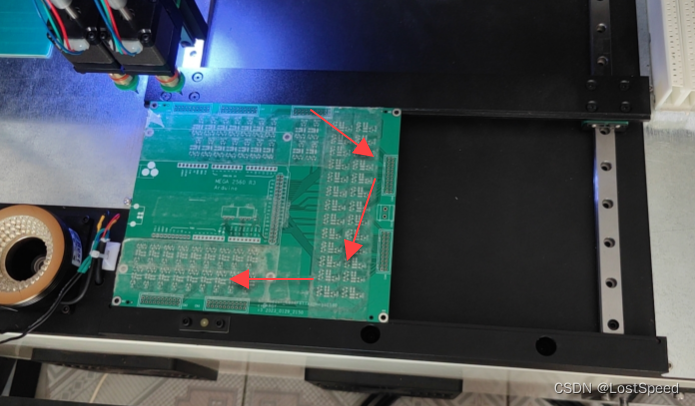
设备是有夹具的, 用百分表打过, 夹具本身在Z方向的平行度是没问题的.
但是, PCB板子的边不一定是非常平滑的, 也有可能PCB的边就不平行, 不是一个标准矩形.
这样会导致板子被夹具夹住后, 还是会在XY平面上旋转, 如果不算板子的坐标角度, 就会导致元件位置有误.
前面做的实验(openpnp - error - 微调mark点坐标后,更新板子其他原件其他坐标报错的变通方法), 没有考虑到板子装入夹具时, 导致的XY平面的角度偏移.
用openpnp提供的功能来确定被夹住的板子的左下角原点位置和板子的角度
先大致将顶部相机光标放在板子左下角.初步捕获板子原点坐标.

此时, 板子角度默认是0(默认假设板子是平行的, 没有旋转角度的偏移).
Z高度(吸嘴从安全高度下降到板子的距离), 采用的是Z1轴的Z方向低限位高度.
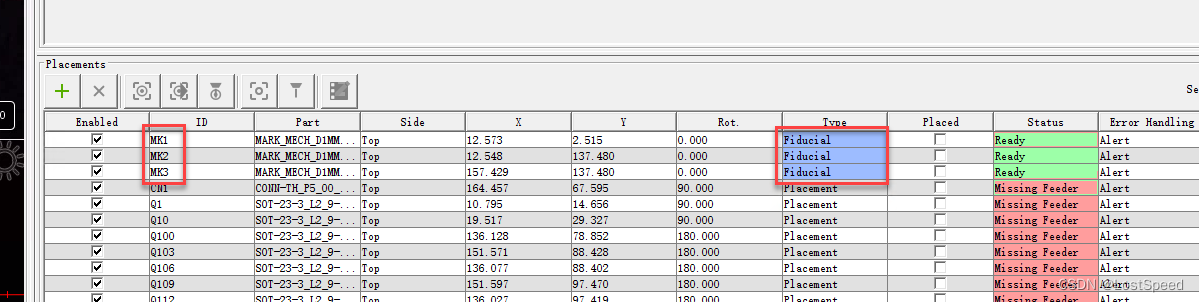
载入坐标文件(named csv), 将3个mark点原件类型选择为定位类型.
开始用多个mark点来确定板子的精确位置和角度
在左边相机界面下出现提示.
根据提示, 在placement表中, 将3个mark点都选中, 然后点击提示狂的Next按钮
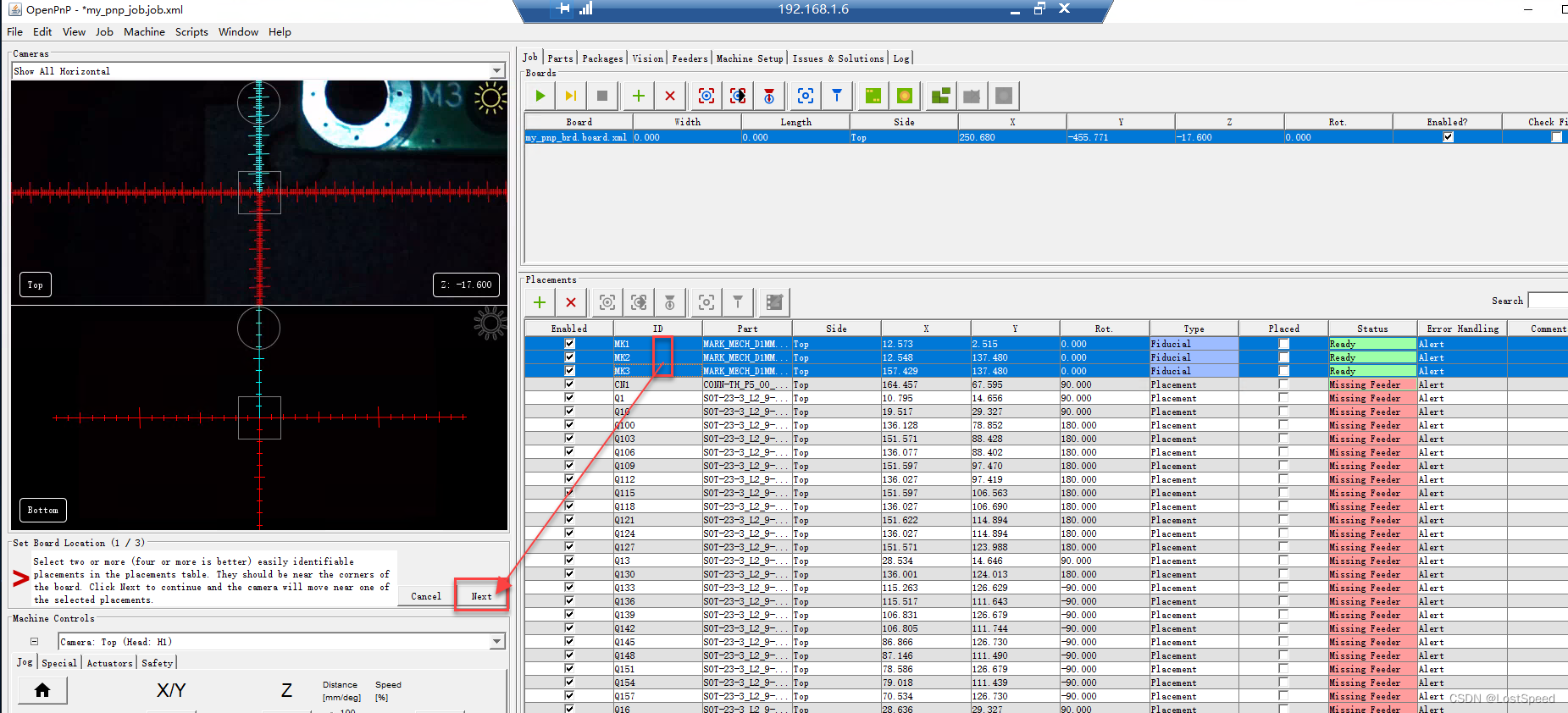
这是, openpnp会将顶部相机移动到其中的一个Mark点附近(因为我们左下角板子原点的定位就是大致确定, 差几mm), 用JOG面板移动顶部相机十字线到openpnp移动到的mark点的精确位置, 然后点击提示框上的Next按钮.
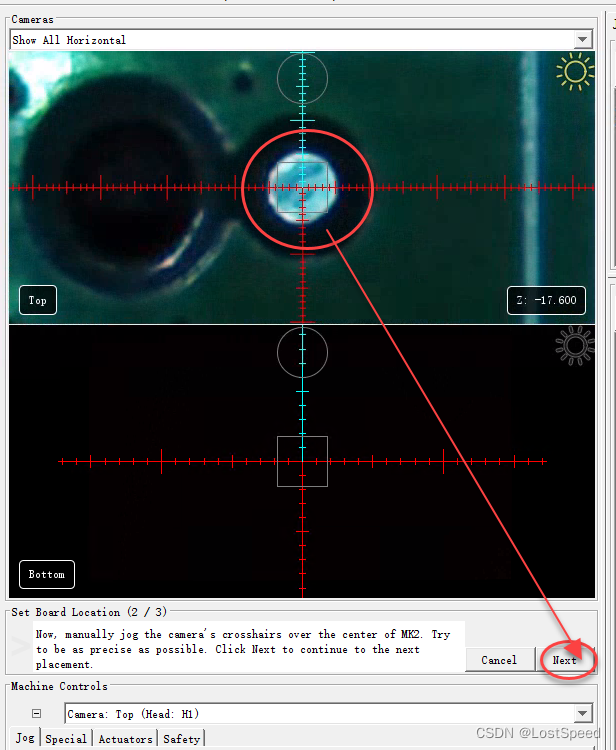
openpnp会移动到第2个mark点附近, 同样精确对中该mark点, 点击提示框的Next按钮.
openpnp会移动到第3个mark点附近, 同样精确对中该mark点, 点击提示框的Next按钮.
当我们选的3个Mark点的精确位置都选择完后, 点击提示框的Finish按钮, 就可以精确确定板子左下角的原点和板子的XY平面的旋转角度了.
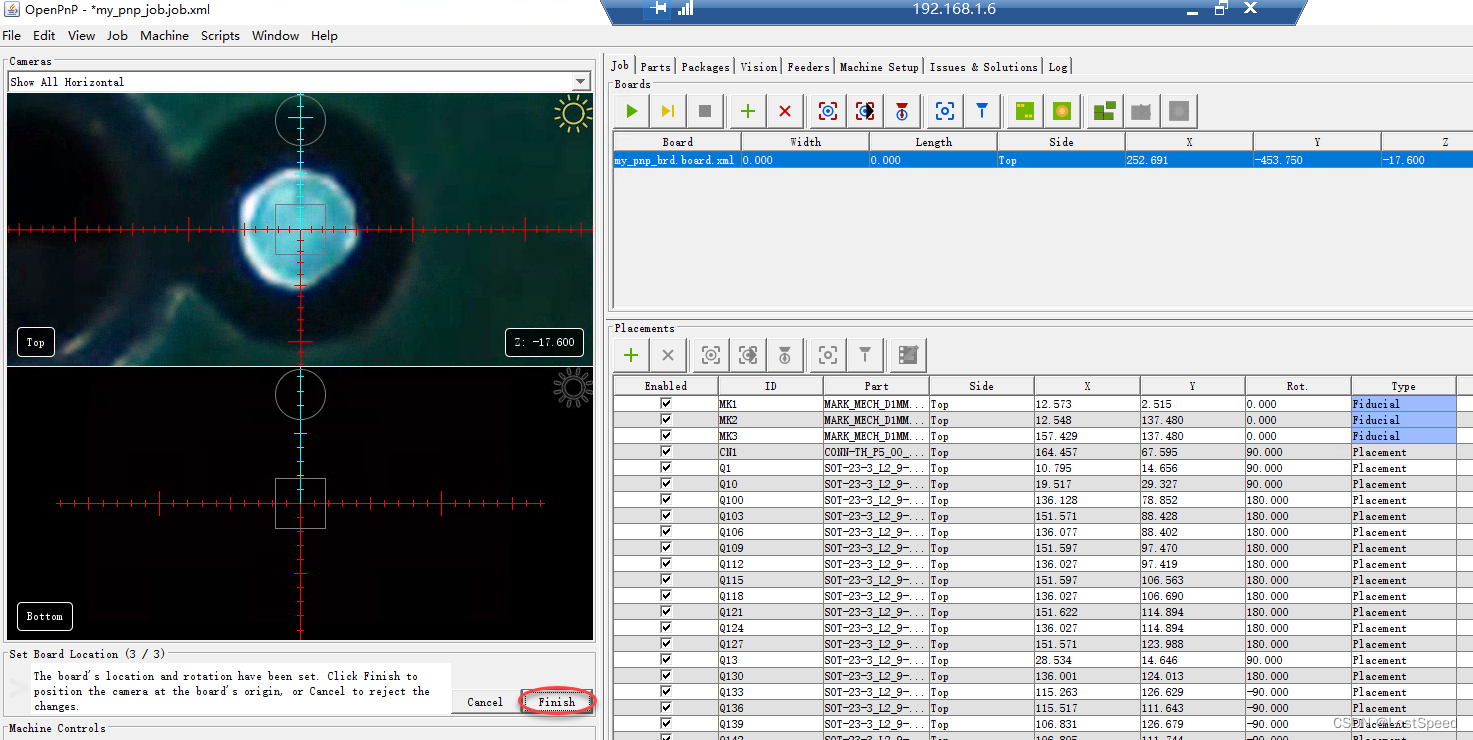
此时, 顶部相机移动到精确定位后的板子左下角原点, 并且能看到, 确实板子夹住后, 是有微小旋转角度的.

记得保存job
备注
现在已经确定了精确的板子左下角原点, 3个Mark点的精确位置, 板子由于夹具和板子粗造度引起的轻微旋转角度.
下一步任务, 是根据以上数据, 更新其他原件的坐标和角度.
但是这一步, 我的设备识别这3个Mark点失败. 得再查资料, 看看咋弄? 如果其他元件不根据以上数据更新坐标和角度, 还是有误差的.
试了一下, 浏览其他元件, 误差不大, 最多差0.2mm.
END
相关文章:
openpnnp - 载入板子后,要确定板子的放置角度
文章目录openpnnp - 载入板子后,要确定板子的放置角度概述用openpnp提供的功能来确定被夹住的板子的左下角原点位置和板子的角度备注ENDopenpnnp - 载入板子后,要确定板子的放置角度 概述 设备是有夹具的, 用百分表打过, 夹具本身在Z方向的平行度是没问题的. 但是, PCB板子的…...

HCIP知识点(前三天)
复习HCIA: 一、TCP/IP模型,OSI模型 OSI 开放式系统互联参考模型 应用层 抽象语言—>编码 表示层 编码—>二进制 会话层 应用程序内部的区分地址(无标准格式) 传输层 TCP/UDP – 分段(受MTU限制)、端…...

模板学堂丨妙用Tab组件制作多屏仪表板并实现自动轮播
DataEase开源数据可视化分析平台于2022年6月正式发布模板市场(https://dataease.io/templates/)。模板市场旨在为DataEase用户提供专业、美观、拿来即用的仪表板模板,方便用户根据自身的业务需求和使用场景选择对应的仪表板模板,并…...

C++:初识函数模板和类模板
目录 一. 泛型编程 二. 函数模板 2.1 什么是函数模板 2.2 函数模板的实例化 2.2.1 函数模板的隐式实例化 2.2.1 函数模板的显示实例化 2.3 函数模板实例化的原理 2.4 模板函数调用实例化原则 三. 类模板 3.1 什么是类模板 3.2 类模板的实例化 一. 泛型编程 泛型编程…...

3.8妇女节如何做好TikTok网红营销?
3月8日是国际妇女节,这一节日已经成为全球关注女性权益和平等的标志性日子,TikTok上话题#internationalwomensday累计播放超10亿次,话题#WomensDay2023累计播放量也将近300万次。 这个特别的日子为品牌提供了一个很好的营销机会。据Nox聚星了…...
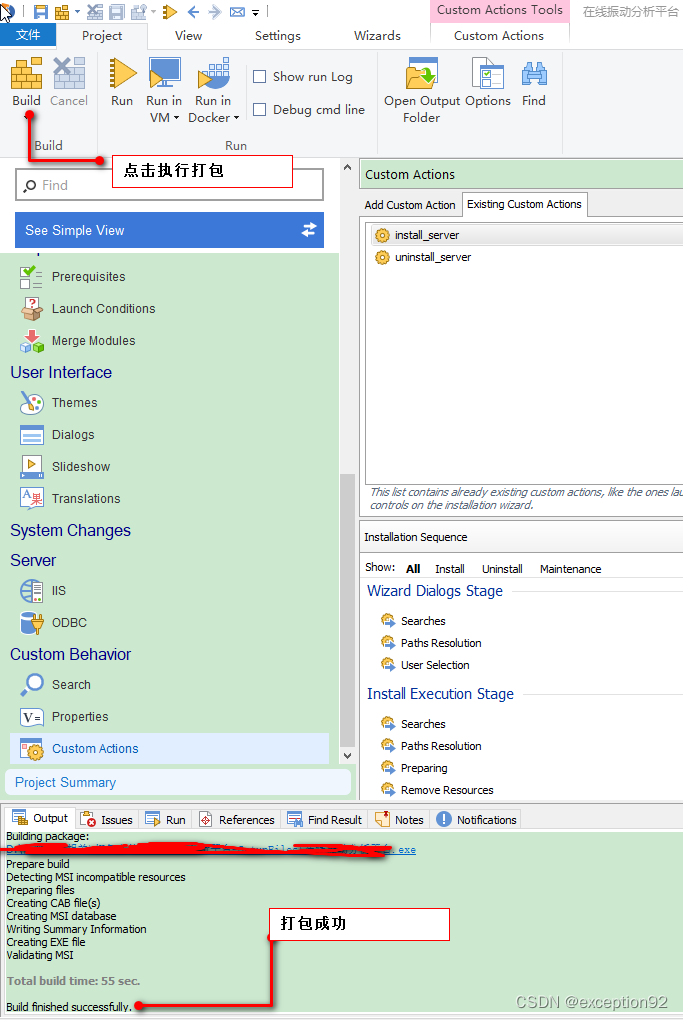
使用Advanced Installer打包程序及运行环境
Advanced Installer 工具版本:20.1.1 设置产品信息 选中右侧【Product Details】输入产品信息 设置文件和文件夹 添加使用VS发布之后的程序文件夹 设置文件夹刷新 选中文件夹,右键选择属性,选中Synchronize标签。启用“Synchronize conten…...
)
华为OD机试真题Python实现【计算堆栈中的剩余数字】真题+解题思路+代码(20222023)
计算堆栈中的剩余数字 题目 向一个空栈中依次存入正整数 假设入栈元素N(1<=N<=2^31-1) 按顺序依次为Nx … N4、N3、N2、N1, 当元素入栈时,如果N1=N2+...Ny(y的范围[2,x],1 <= x <= 1000) 则 N1 到 Ny 全部元素出栈,重新入栈新元素M(M=2*N1) 如依次向栈存储6、1、…...

企业文件数据泄露防护(DLP)
什么是数据丢失防护 数据丢失防护 (DLP) 是保护数据不落入坏人之手的做法。如今,数据传输的主要问题是使大量数据容易受到未经授权的传输。通过设置足够的安全边界,您可以控制数据在网络中的移动。由于您的数据非常有价值&#x…...
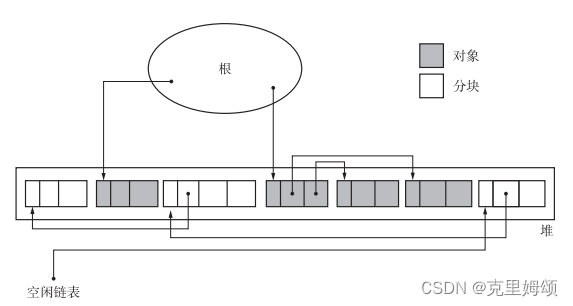
不考虑分配与合并情况下,GO实现GCMarkSweep(标记清楚算法)
观前提醒 熟悉涉及到GC的最基本概念到底什么意思(《垃圾回收的算法与实现》)我用go实现(因为其他的都忘了,(╬◣д◢)ムキー!!) 源码地址(你的点赞,是我开源的…...

利用HGT聚类单细胞多组学数据并推理生物网络
单细胞多组学数据允许同时对多种组学数据进行定量分析,以捕捉复杂的分子机制和细胞异质性。然而现有的工具不能有效地推断不同细胞类型的活性生物网络以及这些网络对外部刺激的反应。 来自:Single-cell biological network inference using a heterogen…...
杂记——18.VSCode的下载及使用
这篇文章,我们来讲一下VSCode,讲一下如何下载及使用VSCode 目录 1.VSCode的下载 1.1VSCode的简介 1.2VSCode的下载与安装 1.2.1下载 1.2.2安装 2.VSCode的使用 2.1界面 2.2基础设置 2.3禁用自动更新 2.3自动保存设置 2.4Vscode更换主题 2.5…...
)
【独家】华为OD机试 - 最少停车数(C 语言解题)
最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南)华为od机试,独家整理 已参加机试人员的实战技巧文章目录 最近更新的博客使用说明本期…...

顶级动漫IP加持之下,3A策略游戏Mechaverse如何改变GameFi
2021年是元宇宙发展的元年,元宇宙与GameFi创造了一波又一波市场热点。在经历第一波热潮之后,元宇宙的到来让不少人看到了加密市场的潜力,同时大家也意识到这将是未来的重要方向。如何将元宇宙推向更广阔的市场,让更多人能够轻松进…...

一款丧心病狂的API测试工具:Apifox!
你好,我是测试开发工程师——凡哥。欢迎和我交流测试领域相关问题(测试入门、技术、python交流都可以) 我们平时在做接口测试的时候,对于一些常用的接口测试工具的使用应该都非常熟悉了: 接口文档:Swagge…...
【前端学习】D2-2:CSS基础
文章目录前言系列文章目录1 Emmet语法1.1 快速生成HTML语法结构1.2 快速生成CSS样式语法1.3 快速格式化代码2 CSS复合选择器2.1 什么是复合选择器2.2 后代选择器(*)2.3 子选择器2.4 并集选择器(*)2.5 伪类选择器2.6 链接伪类选择器…...

Flink / Scala 实战 - 19.ProcessFunction 删除 key 的上一个定时器 TimeTimer
一.引言 ProcessFunction 原始执行状态为每个 key 注册一个较长时间 TimeTimer 并在这期间将所有对应 key 的数据都收集起来,到期完成触发。现在接到新的需求,要求判断数据类型,当特殊标识的数据到达后,需要将 TimeTimer 到期的时间提前。因此需要删掉当前 key 之前注册的老…...

MSTP基础
MSTP基础引入背景技术概览PVSTP(过渡)MSTP单生成树的缺陷1:部分VLAN不通单生成树的缺陷2:无法实现流量的负载分担多生成树解决单生成树实例引入背景 RSTP在STP基础上进行了改进,实现了网络拓扑快速收敛。但由于局域网…...
当ChatGPT遇见stable-diffusion,你不敢相信的创意艺术之旅!
前言 欢迎来到一场创意的旅程,这里将聚焦于 ChatGPT 和 stable-diffusion 这两个令人激动的技术。在这篇文章中,我们将会探索这两种技术如何结合使用,为艺术创作带来全新的可能性。我们将探讨如何利用 ChatGPT 生成富有想象力的创意…...
一文搞定!postman接口自动化测试【附项目实战详解】
目录:导读 | 接口结果判断 功能区 脚本相关 代码模板 | 集合(批量)测试 变化的参数数据 定期任务 接口执行顺序 数据传递 | 解决依赖问题 假设场景 Postman 中的操作 运行 写在最后 附带项目实战教程地址:postman接口自动化测试使用教程项…...

ctfshow【菜狗杯】wp
文章目录webweb签到web2 c0me_t0_s1gn我的眼里只有$抽老婆一言既出驷马难追TapTapTapWebshell化零为整无一幸免无一幸免_FIXED传说之下(雾)算力超群算力升级easyPytHon_P遍地飘零茶歇区小舔田?LSB探姬Is_Not_Obfuscateweb web签到 <?ph…...

游戏开发资源宝库:从计算机图形学到Unity生态的全栈知识索引
1. 项目概述:一份游戏开发者的“藏宝图”如果你是一名游戏开发者,无论是刚入行的新人,还是摸爬滚打多年的老兵,大概都经历过这样的时刻:为了实现一个特定的效果,或是解决一个棘手的技术难题,在搜…...

Muse:现代化多仓库管理工具,提升开发效率与协作体验
1. 项目概述:一个面向开发者的现代化代码库管理工具最近在和一些团队交流时,发现一个挺普遍的现象:大家手头的项目代码库越来越多,有的是自己维护的开源项目,有的是公司内部的核心业务模块,还有一堆实验性的…...

Claude API代理网关:开源项目newaiproxy/claude-api架构解析与部署实战
1. 项目概述:一个连接Claude的API代理网关如果你正在尝试将Claude的对话能力集成到自己的应用里,或者想绕过官方Web界面的一些限制,那么你很可能已经听说过或者正在寻找一个可靠的API代理方案。newaiproxy/claude-api这个项目,本质…...

Java集成OpenAI全攻略:从SDK选型到企业级应用实战
1. 项目概述与核心价值最近在折腾一个内部的知识库问答机器人,后端服务用Java写的,自然就想找个好用的OpenAI SDK来对接。市面上Java的客户端库不少,但要么封装得过于简单,很多高级功能没有,要么就是更新不及时&#x…...

管理幅度怎样设置才合理?
https://mp.weixin.qq.com/s/aoUgKUmsOUyC7wWOONMIIw...

怎样高效使用Mac微信插件:5大实用功能完全指南
怎样高效使用Mac微信插件:5大实用功能完全指南 【免费下载链接】WeChatExtension-ForMac A plugin for Mac WeChat 项目地址: https://gitcode.com/gh_mirrors/we/WeChatExtension-ForMac 想让你的Mac微信变得更加强大吗?WeChatExtension-ForMac正…...

暗黑破坏神2存档编辑器完整指南:快速免费修改d2s文件终极方案
暗黑破坏神2存档编辑器完整指南:快速免费修改d2s文件终极方案 【免费下载链接】d2s-editor 项目地址: https://gitcode.com/gh_mirrors/d2/d2s-editor 你是否曾经在暗黑破坏神2中因为技能点分配错误而懊悔?是否因为刷不到心仪的装备而浪费时间&a…...

AutoDock-Vina终极指南:快速掌握分子对接的完整教程
AutoDock-Vina终极指南:快速掌握分子对接的完整教程 【免费下载链接】AutoDock-Vina AutoDock Vina 项目地址: https://gitcode.com/gh_mirrors/au/AutoDock-Vina AutoDock-Vina是一款开源的分子对接工具,专门用于模拟小分子(配体&…...

从Concur到特斯拉:为什么伟大产品始于“丑陋”的1.0版本
1. 从一笔74亿美元的收购案说起:为什么别急着给1.0产品判死刑 前几天翻看一些旧资料,看到一篇2014年的行业评论,讲的是德国软件巨头SAP以74亿美元的天价,收购了一家名叫Concur的西雅图公司。当时很多人觉得不可思议,Co…...

短视频矩阵系统技术选型:从自研到 SaaS 的成本与收益分析
前言在短视频运营规模化的今天,几乎所有有一定规模的团队都面临着一个关键的技术决策:是自研矩阵管理系统,还是选择成熟的 SaaS 解决方案。很多团队在初期都会选择自研,认为这样可以更好地满足个性化需求,但最终往往陷…...