目标检测+车道线识别+追踪
一种方法:
车道线检测-canny边缘检测-霍夫变换
一、什么是霍夫变换
霍夫变换(Hough Transform)是一种在图像处理和计算机视觉中广泛使用的特征检测技术,主要用于识别图像中的几何形状,尤其是直线、圆和椭圆等常见形状。霍夫变换的核心思想是将图像空间中的形状检测问题转化为参数空间中的峰值检测问题,通过在参数空间中投票累积的方式寻找满足特定形状条件的参数组合,从而有效地识别出图像中的几何特征。
以下是霍夫变换的基本工作原理和步骤:
-
图像空间到参数空间的映射: 霍夫变换的关键在于它将图像中的点与参数空间中的曲线参数对应起来。对于直线检测,通常使用极坐标形式表示直线:ρ = xcosθ + ysinθ,其中ρ是直线到原点(通常取图像左上角)的距离,θ是直线的斜率角。对于每个图像中的边缘点(x, y),都可以在ρ-θ参数空间中对应一条曲线。同样,对于圆或椭圆的检测,也有对应的参数表示形式。
-
投票累积: 对于图像中的每一个边缘点,计算其在参数空间中对应的所有可能参数组合,并在对应的参数值处进行投票(通常是增加计数或累加)。这意味着在参数空间中,每一条可能的直线(或圆、椭圆)都会有一个累积值。这个过程可以形象地理解为,每个边缘点都在参数空间中“投出”一系列票,支持其可能属于的几何形状。
-
峰值检测: 在投票累积完成后,参数空间中会出现一些局部峰值,这些峰值对应于图像中具有大量支持点(即边缘点)的几何形状参数。通过设定阈值或寻找全局/局部极大值,可以识别出这些峰值,即找到了图像中最可能存在的几何形状的参数表示。
-
形状重构: 根据识别出的参数,可以在原始图像空间中画出相应的直线、圆或椭圆,完成形状的检测。对于直线,可以使用ρ和θ计算出直线的方程;对于圆或椭圆,根据找到的参数可以直接绘制出来。
霍夫变换的优点包括:
- 抗噪声:由于采用累加投票的方式,少量噪声点不会对最终结果产生显著影响,除非它们恰好在同一条可能的形状参数线上大量聚集。
- 对形状完整性的要求较低:即使图像中的几何形状部分遮挡或断裂,只要存在足够多的边缘点支持同一参数,霍夫变换仍能有效识别。
其局限性包括:
- 计算复杂度较高:尤其在处理高分辨率图像或检测复杂形状时,参数空间的维数增加,导致投票累积和峰值检测的计算成本增大。
- 对参数选择敏感:霍夫变换的效果很大程度上取决于参数空间的分辨率设置,选择不当可能导致真实形状未能有效识别或产生大量假阳性结果。
尽管现代计算机视觉中出现了许多基于深度学习的高效检测方法,霍夫变换因其简单、直观和鲁棒性,在特定应用场合(如工业检测、低复杂度硬件实现等)中仍然具有实用价值。
1. 基本思想
将传统的图像从X,Y轴坐标系变化到参数空间(m,b)或者霍夫空间(hough space)中,通过参数空间(可称为累加空间)计算局部最大值从而确定原始图像中直线或圆的位置。
二、边缘检测算法
边缘检测算法本质上就是一种滤波算法,区别在于滤波器的选择,其与滤波的规则是一致的。为了理解边缘检测算子,我们引入梯度这个概念,梯度在数字图像处理领域可以理解为像素灰度值变化速度,但在数字图像处理中,实际的应用是不需要求导的,只需要进行简单的加减运算。
几种基本的边缘检测滤波器:sobel、prewitt、roberts算子。
问题:直接使用基本的边缘算子求得的边缘图存在很多问题,如噪声污染没有被排除、边缘线太过粗宽等。因此我们介绍一个先进的边缘检测算子——canny算子。
目前流行的canny算法的具体步骤:
1. 高斯滤波
高斯滤波的原理:根据待滤波的像素点及其邻域点的灰度值按照高斯公式生成的参数规则进行加权平均。
2. 计算梯度图像与角度图像
canny中使用的梯度检测算子是使用高斯滤波器进行梯度计算得到的滤波器,得到的结果也类似于sobel算子,即距离中心点越近的像素点权重越大。
角度图像的计算则较为简单,其作用为非极大值抑制的方向提供指导。
3. 对梯度图像进行非极大值抑制
上一步得到的梯度图像存在边缘粗宽、弱边缘干扰等众多问题,现在可以使用非极大值抑制来寻找像素点局部最大值,将非极大值所对应的灰度值置0,极大值点置1,这样可以剔除一大部分非边缘的像素点,因此最后生成的图像应为一副二值图像,边缘理想状态下都为单像素边缘。
4. 使用双阈值进行边缘连接
经过以上三步得到的边缘质量已经很高了,但是还是存在许多伪边缘,因此canny算法采用的算法是双阈值法,具体思路是:选取两个阈值,将小于低阈值的点认为是假边缘置0,将大于高阈值的点认为是强边缘置1,介于中间的像素点需要进一步的检查。

第二种方法:
利用边缘与颜色提取车道线,利用仿射变换转换成鸟瞰图,并利用直方图和滑动窗口的算法精确定位车道线,利用最小二乘法进行拟合,实现车道线的检测,并计算车辆偏离车道中心的距离,触发报警装置。

第三种方法:
深度学习车道线检测
第三种方法:
需要实现的yolo+车道线检测

大致思路
目标检测+车道线识别+追踪+测距
数据获取和预处理:
首先,从摄像头或传感器获取图像或视频流,并进行预处理。预处理步骤可能包括图像去噪、色彩校正和尺度调整等。
目标检测:
使用深度学习的目标检测算法YOLO对图像或视频中的目标进行检测和定位。这些算法可以输出每个目标的类别、位置和置信度等信息。
车道线识别:
对于每个图像帧,利用图像处理技术(如边缘检测和霍夫变换)来识别图像中的车道线。这可以提供关于道路结构和车道位置的信息。
追踪:
将目标检测结果与前一帧的跟踪结果进行匹配,以实现目标的连续追踪。使用运动模型和特征匹配等技术来预测和更新目标的位置。这可以提供目标的运动轨迹和速度等信息。
测距:
利用单目视觉或其他深度估计技术,根据目标在图像中的大小、形状和视差等信息,计算目标与相机之间的真实距离。这可以提供关于目标与车辆的相对距离,从而帮助系统做出更准确的决策。
集成和决策:
将目标检测、车道线识别、追踪和测距的结果进行集成,并进行高级决策和规划。例如,根据目标的类别、位置和速度等信息,进行避障、路径规划和车辆控制等决策。
参考文章:目标检测+车道线识别+追踪+测距(代码+部署运行)_车道目标检测和跟踪-CSDN博客
相关文章:
目标检测+车道线识别+追踪
一种方法: 车道线检测-canny边缘检测-霍夫变换 一、什么是霍夫变换 霍夫变换(Hough Transform)是一种在图像处理和计算机视觉中广泛使用的特征检测技术,主要用于识别图像中的几何形状,尤其是直线、圆和椭圆等常见形状…...
非wpf应用程序项目【类库、用户控件库】中使用HandyControl
文章速览 前言参考文章实现方法1、添加HandyControl包;2、添加资源字典3、修改资源字典内容 坚持记录实属不易,希望友善多金的码友能够随手点一个赞。 共同创建氛围更加良好的开发者社区! 谢谢~ 前言 wpf应用程序中,在入口项目中…...
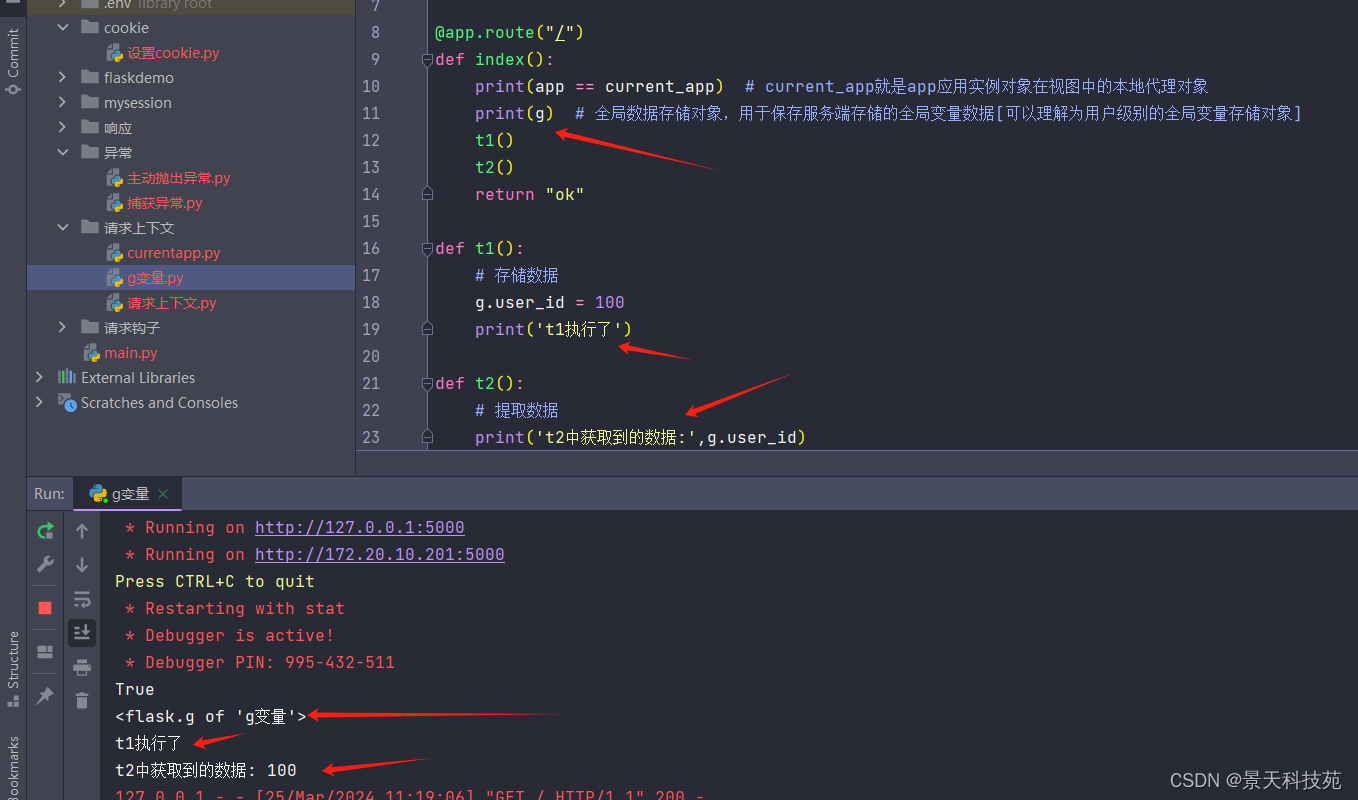
【python】flask执行上下文context,请求上下文和应用上下文原理解析
✨✨ 欢迎大家来到景天科技苑✨✨ 🎈🎈 养成好习惯,先赞后看哦~🎈🎈 🏆 作者简介:景天科技苑 🏆《头衔》:大厂架构师,华为云开发者社区专家博主,…...
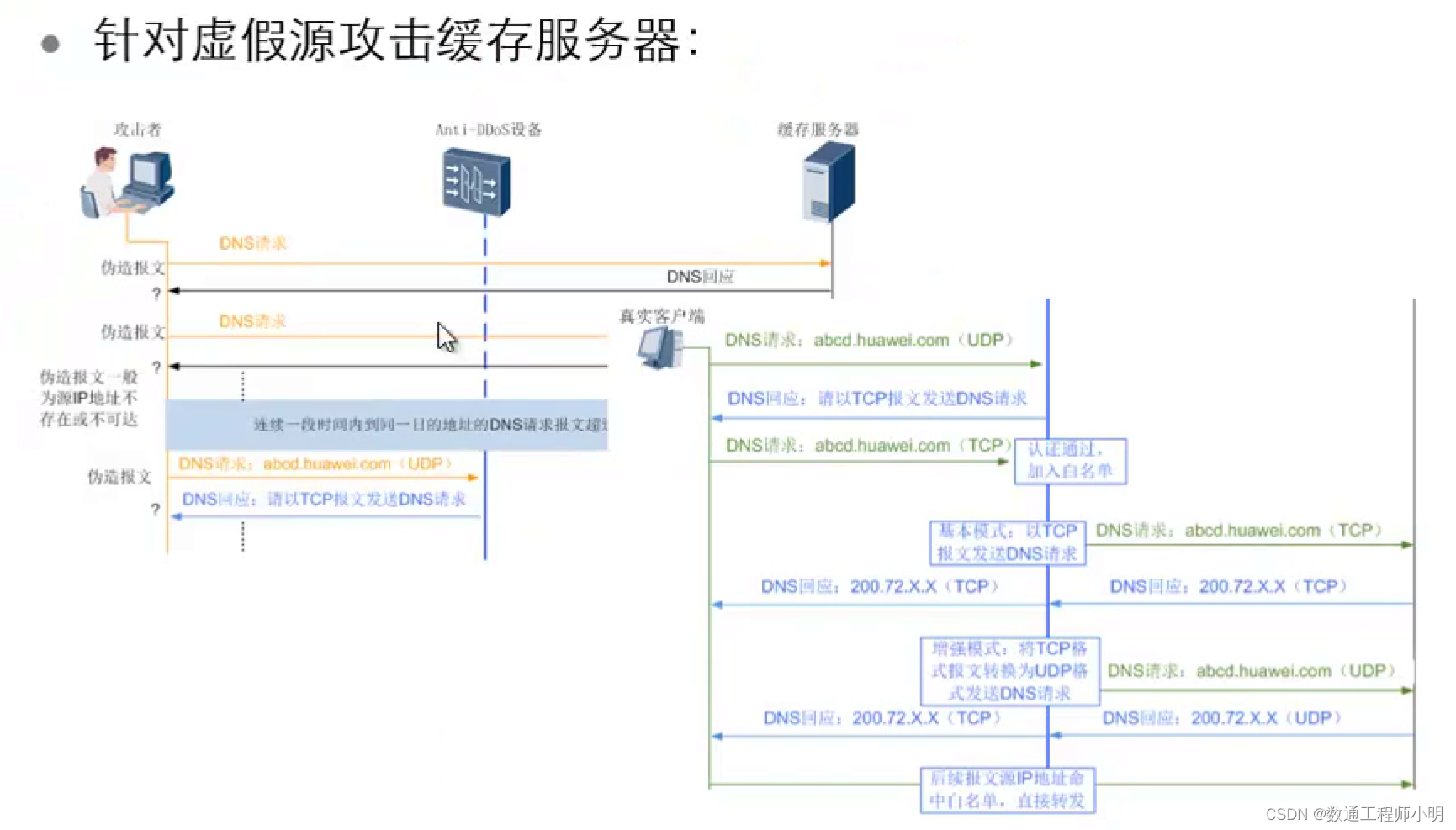
DDos系列攻击原理与防御原理
七层防御体系 静态过滤 命中黑名单 对确定是攻击的流量直接加入黑名单(源地址命中黑名单直接丢弃,缺乏机动性和扩展性) 畸形报文过滤 畸形报文攻击 TCP包含多个标记位,排列组合有规律 • 现象:TCP标记位全为1 …...
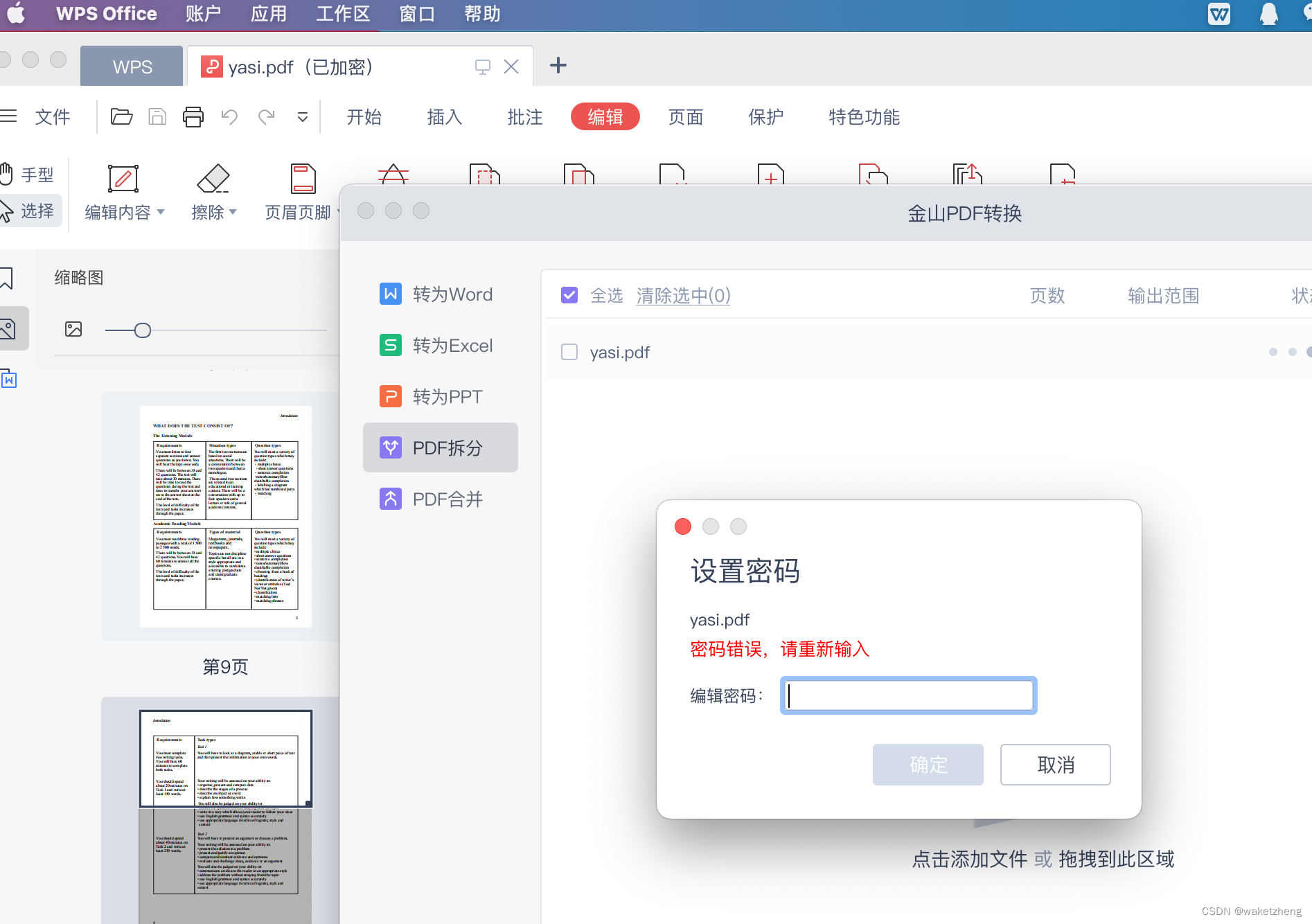
Python拆分PDF、Python合并PDF
WPS能拆分合并,但却是要输入编辑密码,我没有。故写了个脚本来做拆分,顺便附上合并的代码。 代码如下(extract.py) #!/usr/bin/env python """PDF拆分脚本(需要Python3.10)Usage::$ python extract.py <pdf-fil…...
经典总结大全-技巧总结-数据开发-基本函数-常识整理-经典面试题)
SqlServer(4)经典总结大全-技巧总结-数据开发-基本函数-常识整理-经典面试题
六、技巧 1、11,12的使用,在SQL语句组合时用的较多 “where 11” 是表示选择全部 “where 12”全部不选, 如: if strWhere !‘’ begin set strSQL ‘select count(*) as Total from [’ tblName ] where ’ strWhere …...
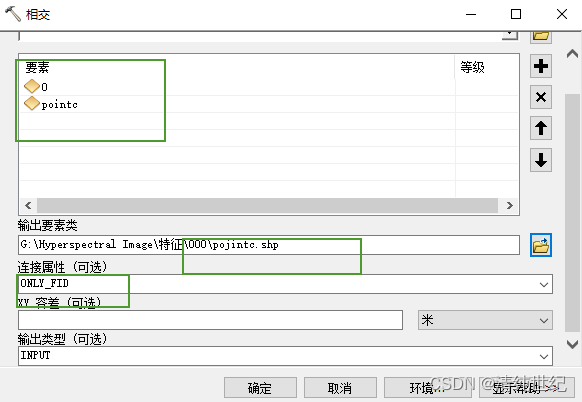
ArcGIS矢量裁剪矢量
一、利用相交工具 Arctoolbox工具一分析工具一叠加分析一相交...

pygame用chatgpt绘制3d沿x轴旋转的
import pygame from pygame.locals import * import sys import mathpygame.init()width, height 800, 600 screen pygame.display.set_mode((width, height))vertices [(0, 100, 0), (100, 200, 0), (300, 100, 0)]angle 0 rotation_speed 2 # 可根据需要调整旋转速度 c…...

golang大小写规则的影响
目录 golang大小写的规则: 1、可见性(visibility): 2、包的导入和调用: 3、json序列化和反序列化: 4、结构体字段的导出和可见性: 5、方法和函数的导出和可见性 : 6、常量和变…...
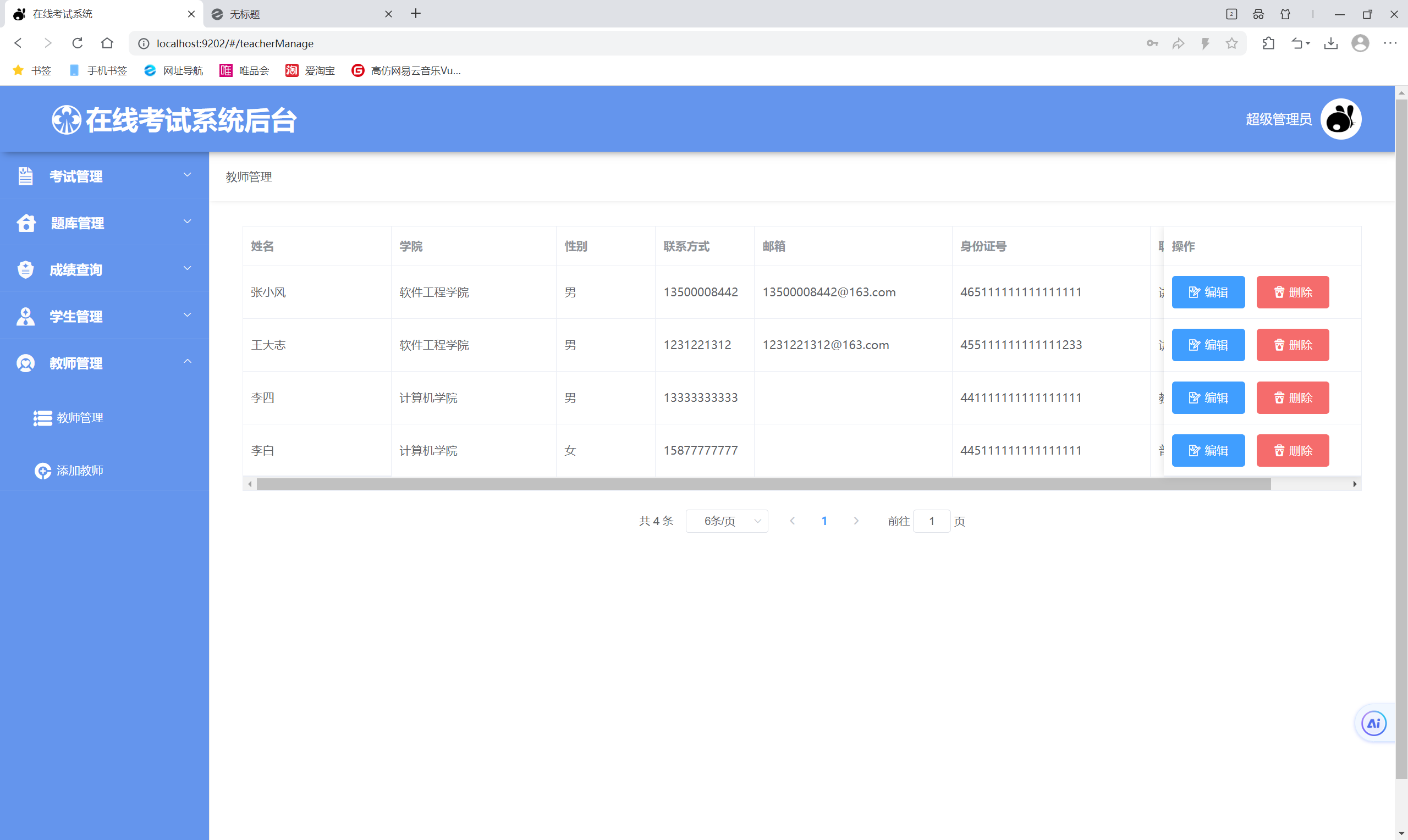
基于Java在线考试系统系统设计与实现(源码+部署文档)
博主介绍: ✌至今服务客户已经1000、专注于Java技术领域、项目定制、技术答疑、开发工具、毕业项目实战 ✌ 🍅 文末获取源码联系 🍅 👇🏻 精彩专栏 推荐订阅 👇🏻 不然下次找不到 Java项目精品实…...

如何应对复杂软件工程的开发流程?
应对复杂软件工程的开发流程通常需要一个结构化和系统化的方法。这种方法不仅包括采用合适的技术和工具,还涉及到项目管理、团队协作、需求分析、设计、实施、测试、部署和维护等多个方面。以下是一些关键步骤,以及如何将这些步骤应用于使用LabVIEW进行软…...
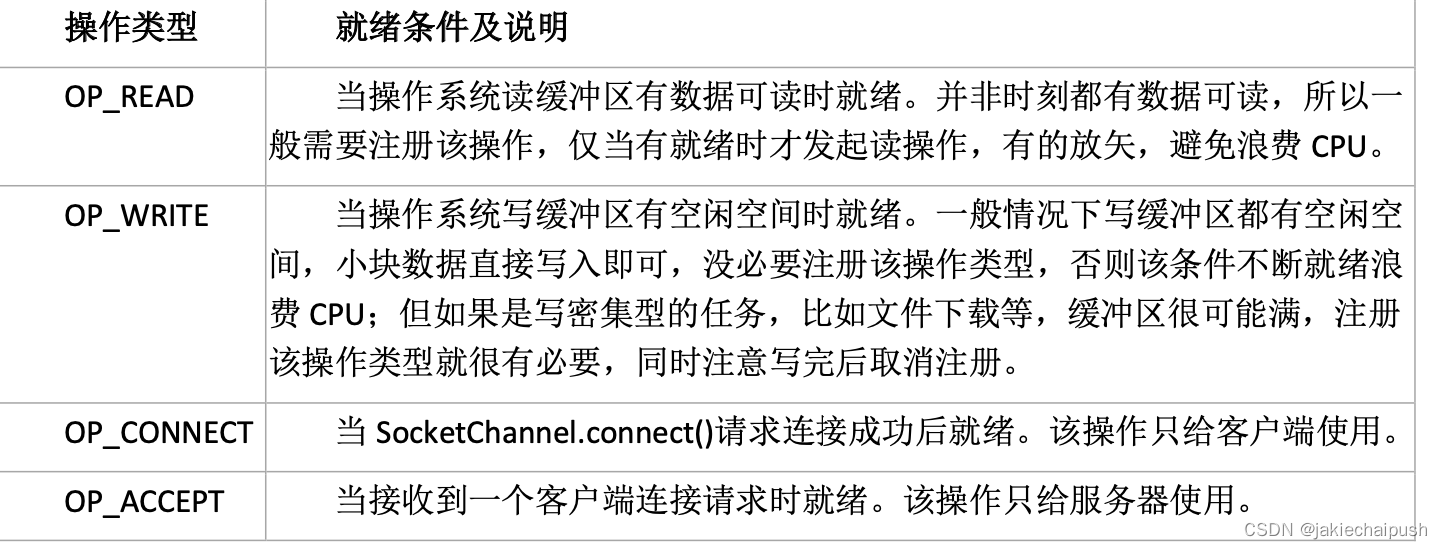
JAVA的NIO和BIO底层原理分析
文章目录 一、操作系统底层IO原理1. 简介2. 操作系统进行IO的流程 二、BIO底层原理1. 什么是Socket2. JDK原生编程的BIO 三、Java原生编程的NIO1. 简介2. NIO和BIO的主要区别3. Reactor模式4. NIO的三大核心组件5. NIO核心源码分析 一、操作系统底层IO原理 1. 简介 IO&#x…...
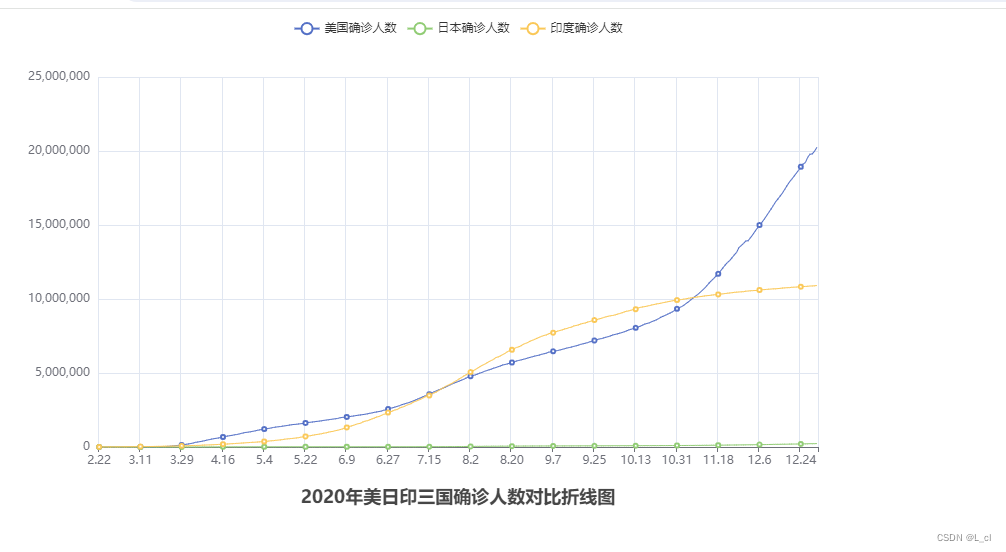
Python学习从0到1 day18 Python可视化基础综合案例 1.折线图
我默记这段路的酸楚,等来年春暖花开之时再赏心阅读 —— 24.3.24 python基础综合案例 数据可视化 — 折线图可视化 一、折线图案例 1.json数据格式 2.pyecharts模块介绍 3.pyecharts快速入门 4.数据处理 5.创建折线图 1.json数据格式 1.什么是json 2.掌握如何使用js…...

HTML网站的概念
目录 前言: 1.什么是网页: 2.什么是网站: 示例: 3.服务器: 总结: 前言: HTML也称Hyper Text Markup Language,意思是超文本标记语言,同时HTML也是前端的基础&…...

【微服务】Nacos(配置中心)
文章目录 1.AP和CP1.基本介绍2.说明 2.Nacos配置中心实例1.架构图2.在Nacos Server加入配置1.配置列表,加号2.加入配置3.点击发布,然后返回4.还可以编辑 3. 创建 Nacos 配置客户端模块获取配置中心信息1.创建子模块 e-commerce-nacos-config-client50002…...

比较AI编程工具Copilot、Tabnine、Codeium和CodeWhisperer
主流的几个AI智能编程代码助手包括Github Copilot、Codeium、Tabnine、Replit Ghostwriter和Amazon CodeWhisperer。 你可能已经尝试过其中的一些,也可能还在不断寻找最适合自己或公司使用的编程助手。但是,这些产品都会使用精选代码示例来实现自我宣传…...

顺应互联网发展大潮流,红河农资招商火爆开启
顺应互联网发展大潮流,红河农资招商火爆开启 进入新世纪,生态农业建设成为了影响和改变农村、农业工作的重要领域。尤其是在互联网的快速发展之下,实现农业结构调整,推动互联网模式的发展,成为了当前生态农业发展的主流…...
网络七层模型之传输层:理解网络通信的架构(四)
🤍 前端开发工程师、技术日更博主、已过CET6 🍨 阿珊和她的猫_CSDN博客专家、23年度博客之星前端领域TOP1 🕠 牛客高级专题作者、打造专栏《前端面试必备》 、《2024面试高频手撕题》 🍚 蓝桥云课签约作者、上架课程《Vue.js 和 E…...

微信小程序实现图片懒加载的4种方案
实现图片懒加载的意义 实现图片懒加载可以提高小程序的性能和用户体验,是微信小程序开发中非常重要的一项优化手段。微信小程序实现图片懒加载的目的主要有以下几点: 提高页面加载速度:图片通常是页面中最耗时的资源,如果一次性…...

各大pdf转word软件都用的哪家的ocr引擎?
国内一般的PDF软件一般都调用某国际PDF原厂的OCR接口,但这家公司是主要做PDF,在OCR方面并不专注,一些不是很复杂的场景还能应付得过来,复杂一点的效果就强差人意了,推荐用金鸣表格文字识别系统,它主要有以下…...

自动驾驶汽车保险七大议题:从技术视角看责任转移与系统设计
1. 自动驾驶汽车保险的七个核心议题:从工程师视角看技术与责任的碰撞作为一名在汽车电子和嵌入式系统领域摸爬滚打了十几年的工程师,我亲眼见证了从ABS到自适应巡航,再到今天各种L2辅助驾驶的演进。每当和圈内朋友聊起全自动驾驶,…...

专业指南:高效在ARM设备上运行x86_64程序的完整解决方案
专业指南:高效在ARM设备上运行x86_64程序的完整解决方案 【免费下载链接】box64 Box64 - Linux Userspace x86_64 Emulator with a twist, targeted at ARM64, RV64 and LoongArch Linux devices 项目地址: https://gitcode.com/gh_mirrors/bo/box64 你是否正…...

系统化调试方法论:从STOP到DETECT,告别救火式排查
1. 项目概述:一套源自实战的系统化调试方法论如果你是一名开发者,或者正在和AI Agent打交道,大概率都经历过这种场景:线上服务突然报错,你心急火燎地登录服务器,看着日志里一堆堆的异常信息,脑子…...

联发科与威睿电通合作:深度解析全球模式SoC如何实现CDMA与LTE融合
1. 项目概述:一次芯片设计领域的“握手”每年的国际消费电子展(CES)总是热闹非凡,各种炫目的消费电子产品占据着舞台中央。但作为从业者,我们更关注的是那些隐藏在光鲜产品背后、驱动一切的技术基石。2014年的CES上&am…...

模拟内存计算与ReRAM在触觉手势识别中的应用
1. 模拟内存计算技术概述模拟内存计算(Analog In-Memory Computing,简称AiMC)正在彻底改变传统计算架构的设计范式。这项技术的核心突破在于打破了困扰计算领域长达半个多世纪的"冯诺依曼瓶颈"——即处理器与存储器之间的数据搬运带…...

书匠策AI:论文写作小白也能一键“搞定“毕业论文?深度拆解这个AI神器到底有多香!
微信公众号搜一搜:书匠策AI | 官网直达:www.shujiangce.com 各位同学、各位在论文苦海里挣扎的"秃头星人"们,今天咱们来聊一个让我最近疯狂安利的东西——书匠策AI。 别急着划走,这不是广告,这…...

办公室翻新预算超支了怎么办
很多小微企业、创业团队翻修办公室。算来算去,最后发现预算超支了。这种情况真的太常见了。我们今天一步步理,给你实打实的解决办法。大家最关心的5个问题解答Q1:办公室翻新,哪块更容易超预算?A:大部分情况…...

物联网时代:从技术连接到价值过滤的思辨与实践
1. 从“动能”到“意义”:一场关于技术本质的思辨“你能发出闪电,叫它行去,使它对你说:‘我们在这里’?”——《约伯记》38:35。这句古老的诘问,在今天读来,竟意外地切中了我们与技术关系的核心…...

工程师如何从错误中学习:测试测量实战与思维跃迁
1. 项目概述:为什么“错误”是工程师的必修课在测试测量这个行当里摸爬滚打了十几年,我经手过的示波器、信号源、数据采集卡不计其数,也带过不少刚入行的新人。我发现一个挺有意思的现象:学校里成绩拔尖、理论扎实的学生ÿ…...

开源AR虚拟试衣项目openclaw-genpark-ar-tryon核心技术解析与实践
1. 项目概述:当AR试衣遇见开源社区最近在逛GitHub的时候,偶然发现了一个挺有意思的项目,叫openclaw-genpark-ar-tryon。光看名字,一股浓浓的“开源”和“增强现实”味儿就扑面而来了。点进去一看,果然,这是…...