DDD 中的实体和值对象有什么区别?
在DDD中,实体 Entity 和值对象 Value Object 是两个基本的概念,它们之间有一些重要的区别。
- 唯一性:实体是唯一的,每个实体都有一个唯一的标识符,即使它的属性在一段时间内发生了变化,它仍然是这个实体。与之不同,值对象可以有一组属性,这些属性可以描述一个事物的状态或特征,但它们没有唯一的标识符,即使两个值对象的属性完全相同,它们也被视为两个不同的对象。
- 状态变化:实体可以有状态,并且可以在不同的时间或场景下有不同的状态。例如,一个订单实体可能在创建时是一个待支付状态,支付后变为已支付状态,而值对象通常只有固定的属性,不会有状态变化。
- 生命周期:实体有一个明确的生命周期,它可能随着时间的推移而创建、更新或删除,而值对象没有自己的生命周期,它们通常是在需要时创建,并在不再需要时被垃圾回收。
- 相等性:对于实体来说,两个具有相同标识符的实体是相同的,无论它们的状态如何。对于值对象,两个具有相同属性的值对象被认为是相等的,但这需要通过比较它们的属性来确定。
综上所述,实体和值对象在DDD中是两种不同的概念。在 DDD 中,实体通常用于表示有唯一表示以及状态变化的领域概念,而值对象通常用于表示无唯一标识以及不可变的属性集合。值对象形式上是一个对象,但是其本质则和一个属性值是等价的。
相关文章:

DDD 中的实体和值对象有什么区别?
在DDD中,实体 Entity 和值对象 Value Object 是两个基本的概念,它们之间有一些重要的区别。 唯一性:实体是唯一的,每个实体都有一个唯一的标识符,即使它的属性在一段时间内发生了变化,它仍然是这个实体。与…...

算法-最值问题
#include<iostream> using namespace std; int main() {int a[7];//上午上课时间int b[7];//下午上课时间int c[7];//一天总上课时间for (int i 0; i < 7; i) {cin >> a[i] >> b[i];c[i] a[i] b[i];}int max c[0];//max记录最长时间int index -1;//索…...

Go 性能压测工具之wrk介绍与使用
在项目正式上线之前,我们通常需要通过压测来评估当前系统能够支撑的请求量、排查可能存在的隐藏bug;压力测试(压测)是确保系统在高负载情况下仍能稳定运行的重要步骤。通过模拟高并发场景,可以评估系统的性能瓶颈、可靠…...
)
数学思想论(有目录)
数学思想是数学发展过程中的重要指导原则,它涉及对数学概念、方法和理论的理解和认识,以及如何利用这些工具来解决实际问题。数学思想的形成和演进是随着数学的发展而逐渐深化的,它体现了人类对数学本质和应用的不断探索和思考。 一些主要的数学思想包括: 函数与方程思想…...
C++的并发世界(五)——线程状态切换
0.线程状态 初始化:该线程正在被创建; 就绪:该线程在列表中就绪,等待CPU调度; 运行:该线程正在运行; 阻塞:该线程被阻塞挂机,Blocked状态包括:pendÿ…...
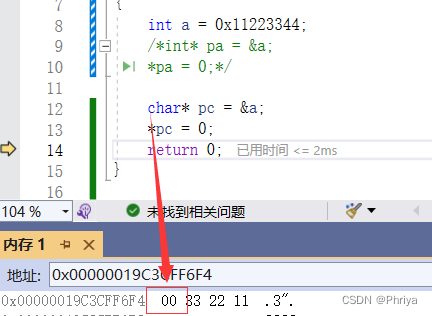
C语言——指针
地址是由物理的电线上产生的,能够标识唯一一个内存单元。在C语言中,地址也叫做指针。 在32位机器中,有32根地址线。地址是由32个0/1组成的二进制序列,也就是用4个字节来存储地址。 在64位机器中,有64根地址线。地址是…...

手搓二分查找
第一种: 该种方法是若a[mid]目标数,则让r一直等于mid,让l往右移动,一直移动到rl,这时候跳出循环,在循环外判断 但是不能写成让lmid,让r往左移动,比如a[2]key,这时&#x…...

pycharm调试(步过(Step Over)、单步执行(Step Into)、步入(Step Into)、步出(Step Out))
pycharm调试 pycharm调试 pycharm调试为什么要学会调试?1. 步过 (Step Over)2. 单步执行 (Step Into)3. 步入(Step Into)4. 步出(Step Out) 为什么要学会调试? 调试可以帮助初学者更深入地理解编程基础&am…...
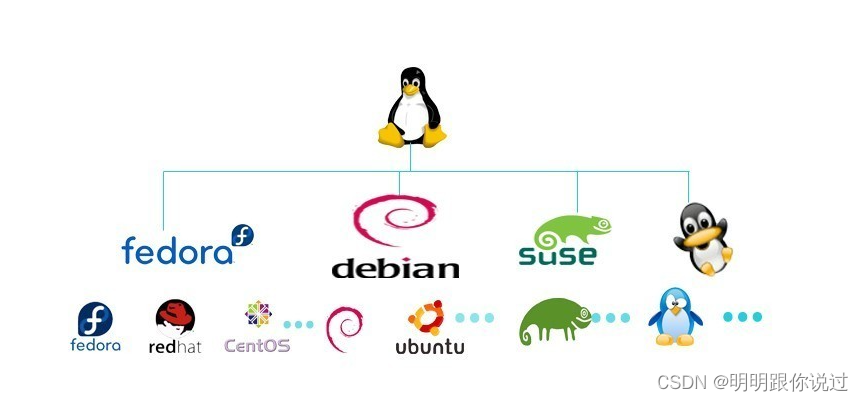
Linux是什么,该如何学习
🐇明明跟你说过:个人主页 🏅个人专栏:《Linux :从菜鸟到飞鸟的逆袭》 🏅 🔖行路有良友,便是天堂🔖 目录 一、引言 1、Linux的起源与发展 2、Linux在现代计算机领域…...
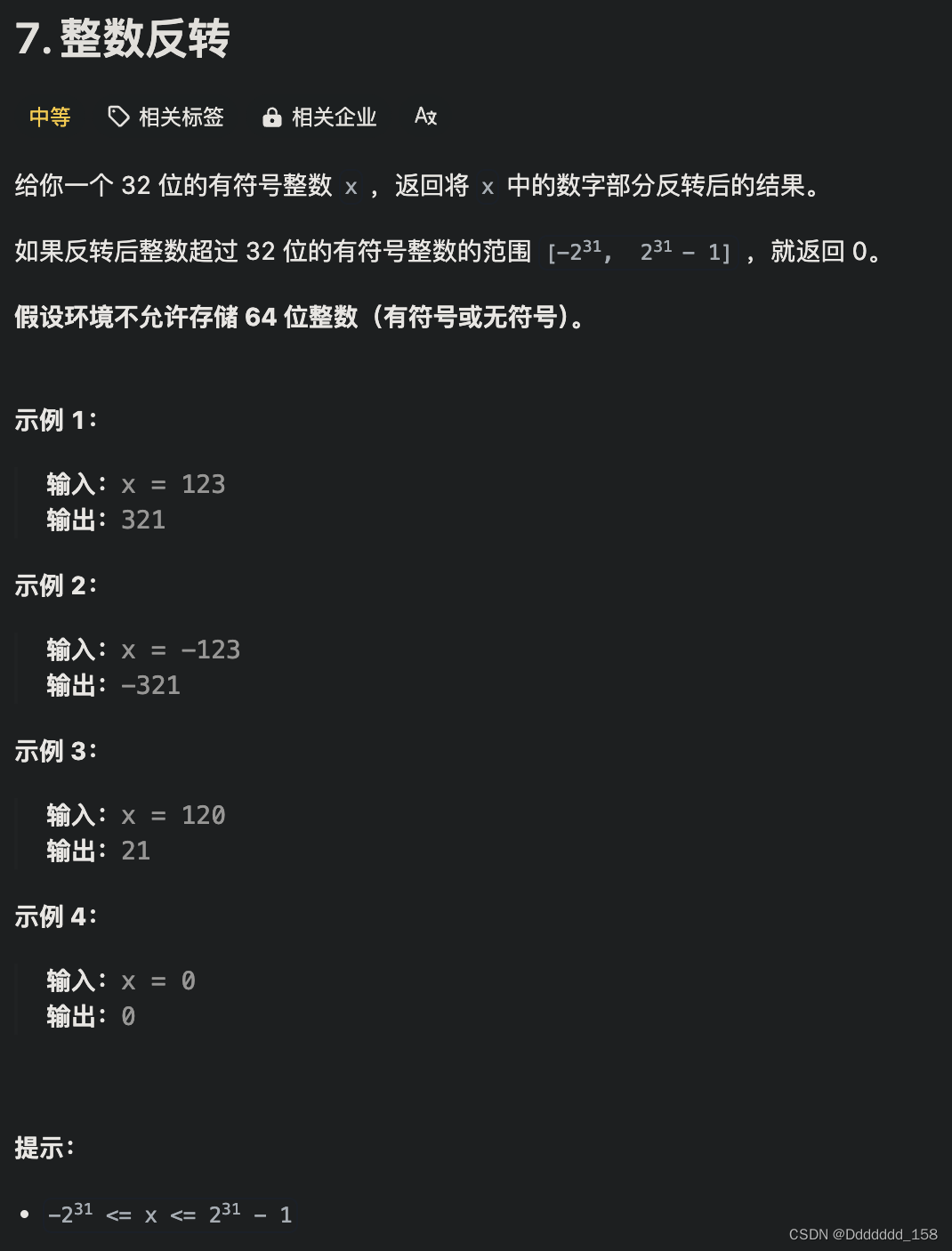
C++ | Leetcode C++题解之第7题整数反转
题目: 题解: class Solution { public:int reverse(int x) {int rev 0;while (x ! 0) {if (rev < INT_MIN / 10 || rev > INT_MAX / 10) {return 0;}int digit x % 10;x / 10;rev rev * 10 digit;}return rev;} };...
Linux------一篇博客了解Linux最常用的指令
🎈个人主页:靓仔很忙i 💻B 站主页:👉B站👈 🎉欢迎 👍点赞✍评论⭐收藏 🤗收录专栏:Linux 🤝希望本文对您有所裨益,如有不足之处&#…...
vscode安装通义灵码
作为vscode的插件,直接使用 通义灵码-灵动指间,快码加编,你的智能编码助手 通义灵码,是一款基于通义大模型的智能编码辅助工具,提供行级/函数级实时续写、自然语言生成代码、单元测试生成、代码注释生成、代码解释、研…...
RIP协议(路由信息协议)
一、RIP协议概述 RIP协议(Routing Information Protocol,路由信息协议)是一种基于距离矢量的内部网关协议,即根据跳数来度量路由开销,进行路由选择。 相比于其它路由协议(如OSPF、ISIS等)&#…...

SpringBoot根据配置类动态加载不同环境下的自定义配置
dev环境配置 Profile({"dev","test"}) PropertySource("classpath:dev.properties") public class DevConfigLoader { }Profile("prod") PropertySource("classpath:prod.properties") public class ProdConfigLoader { }P…...
什么?穷哥们没钱RLHF?跟我一起DPO吧,丐版一样用
本次DPO训练采用TRL的方式来进行训练 Huggingface TRL是一个基于peft的库,它可以让RL步骤变得更灵活、简单,你可以使用这个算法finetune一个模型去生成积极的评论、减少毒性等等。 本次进行DPO的模型是一个500M的GPT-2,目的是训练快&#x…...
【Leetcode笔记】102.二叉树的层序遍历
目录 知识点Leetcode代码:ACM模式代码: 知识点 vector、queue容器的操作 对vector<int> vec;做插入元素操作:vec.push_back(x)。对queue<TreeNode*> que;做插入元素操作:que.push(root);。队列有四个常用的操作&…...

进程的状态
目录 1.操作系统的进程状态 2.Linux系统的进程状态 特殊的进程状态 进程的查看 1.操作系统的进程状态 a.新建:就是新建一个进程 b.运行:PCB结构体在运行队列中排队 c.阻塞:PCB结构体在等待队列中,等待非CPU资源就续 d:挂起…...

spring-boot集成websocket
引入Maven依赖包 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-websocket</artifactId><version>跟随spingboot版本</version> </dependency>后端代码 /*** 开启WebSocket支持*…...

【Python】【Flask】提交表单后报500错误
【背景】 日常用户使用的一个Online的基于Flask做的工具,今天忽然报错,看现象是点击表单提交按钮后发生错误。报500内部错误。 【分析】 用print步步为营接近root cause。 报错对应视图函数的展示部分正常执行。提交表单按钮后的内容全部没有正常执行。 提交表单用的方法是…...

Golang vs Java
目录 前言 一、语言背景与特性 二、性能与效率 三、生态系统与库支持 四、开发体验与工具支持 五、微服务架构设计中的对比 六、总结与建议 前言 在当今的软件开发世界中,选择合适的编程语言对于项目的成功至关重要。GoLang(也称为Golang&#x…...

电力系统网络安全:从风险认知到威胁建模的实战指南
1. 从日常运维到风险认知:重新审视大容量电力系统的安全基线在能源行业干了十几年,我见过太多同行把大容量电力系统(Bulk Energy System, BES)的运维简化为“确保别停电”。日常的告警处理、设备巡检、工单流转构成了工作的全部叙…...

3分钟掌握B站缓存视频转换:m4s-converter终极使用指南
3分钟掌握B站缓存视频转换:m4s-converter终极使用指南 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 你是否曾经遇到过这样的困扰&a…...
:基于1726张A/B测试图谱验证的色阶偏移阈值与CMYK映射规则)
Midjourney蓝莓印相技术白皮书(2024V2.3权威修订版):基于1726张A/B测试图谱验证的色阶偏移阈值与CMYK映射规则
更多请点击: https://intelliparadigm.com 第一章:Midjourney Blueberry印相技术的演进脉络与核心定义 Midjourney Blueberry印相技术并非官方术语,而是社区对Midjourney V6中基于蓝光敏感通道(Blue Channel Emulation࿰…...
)
用微信小程序点灯!STC89C51+ESP8266物联网入门实战(附完整源码)
用微信小程序点灯!STC89C51ESP8266物联网入门实战(附完整源码) 当你第一次看到手机上的按钮能控制真实世界的灯泡时,那种"魔法成真"的震撼感,正是物联网的魅力所在。本文将带你用不到百元的硬件成本…...
)
别再死记硬背了!用Python+Graphviz把离散数学的图论和关系画出来(附代码)
用PythonGraphviz将离散数学中的抽象概念可视化 离散数学是计算机科学的基础课程之一,但其中的图论、二元关系等概念往往因为高度抽象而让学习者感到困惑。传统的死记硬背方式不仅效率低下,也难以真正理解这些概念的本质。本文将介绍如何利用Python的net…...

Sticky:重新定义Linux桌面数字便利贴的智能助手
Sticky:重新定义Linux桌面数字便利贴的智能助手 【免费下载链接】sticky A sticky notes app for the linux desktop 项目地址: https://gitcode.com/gh_mirrors/stic/sticky 你是否曾在紧张的编程调试中,突然想到一个关键算法优化方案࿰…...

知网AI率80%降到15%教程,比话降AI知网算法专精+售后保障!
知网AI率80%降到15%教程,比话降AI知网算法专精售后保障! 如果你是硕博毕业生、学校送知网检测、答辩前查出 AI 率 80%——这篇文章直接给你完整操作教程。从「拿到 80% 报告」到「学校送审通过」的完整路径,每一步该做什么、花多少时间、花多…...
)
别再死记公式了!用Python+LTspice快速搞定LC滤波器设计(附仿真文件)
用PythonLTspice实现LC滤波器设计的工程化实践 在传统电子工程教学中,LC滤波器设计往往陷入繁琐的公式推导和手工计算泥潭。当学生终于理解完所有理论公式,准备动手实践时,却发现自己被复杂的参数计算和反复的电路调试所困扰。这种理论与实践…...

激活沉睡用户:WPF应用的唤醒策略
在现代软件开发中,如何有效地激活沉睡用户是每个应用开发者都需要面对的问题。特别是对于WPF(Windows Presentation Foundation)应用来说,如何在用户不活跃一段时间后,重新唤醒他们的兴趣并引导他们回到应用中使用,是一个既有挑战又有策略性的任务。本文将介绍如何通过邮…...

保姆级教程:用Docker在树莓派上部署HomeAssistant,打造你的智能家庭中枢
树莓派DockerHomeAssistant:零基础构建高性价比智能家居中枢 在智能家居领域,树莓派凭借其低功耗、高性价比和丰富的GPIO接口,成为DIY玩家的首选平台。而将HomeAssistant与Docker结合部署,不仅能实现环境隔离和快速迁移࿰…...