【C++】用红黑树封装map和set
我们之前学的map和set在stl源码中都是用红黑树封装实现的,当然,我们也可以模拟来实现一下。在实现之前,我们也可以看一下stl源码是如何实现的。我们上篇博客写的红黑树里面只是一个pair对象,这对于set来说显然是不合适的,所以要想让一个红黑树的代码同时支持map和set,就用上模板就可以了
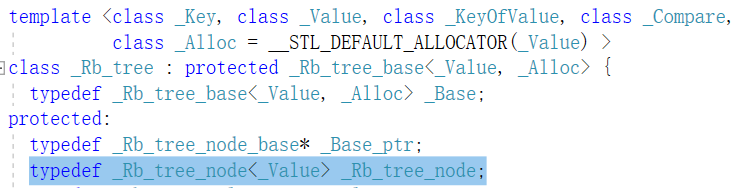
我们来看看stl源码中是如何实现的
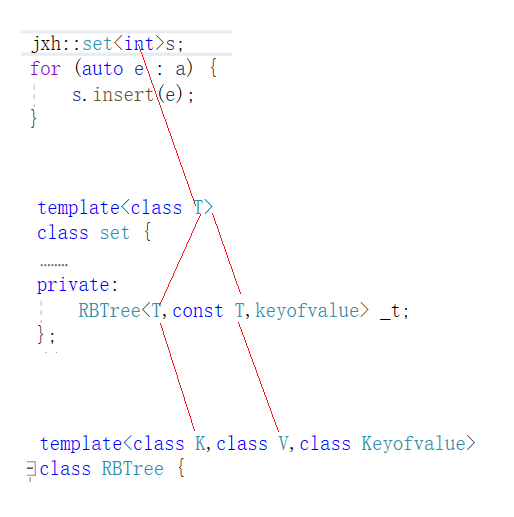
前两个模板参数是两个类型,就是我们要在set或map中放入什么

set不是只需要放入一个吗?所以,set在传参数的时候是这么传的
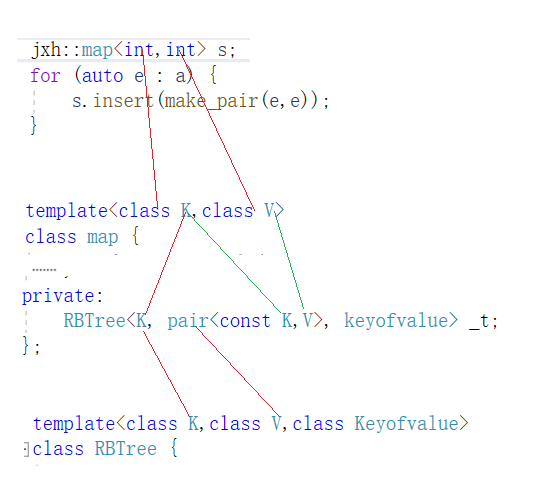
它的前两个传的全是Key,它这么实现还是为了兼容map,map传的是什么呢?我们再来看一下
传的一个是Key,一个是pair类的对象。那pair中不是已经有Key了吗,为什么还要传Key呢?因为一个最简单的原因之一find函数的参数是Key。




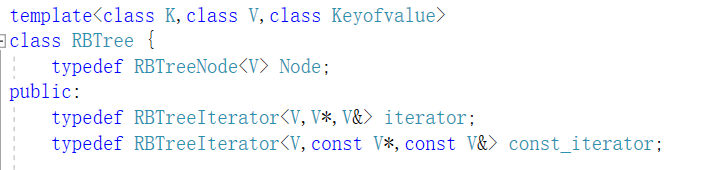
那么看第三个模板参数keyofvalue,传这个类型是为了从value中找到key,因为我们树这个类传给节点类的时候只传了value,如下图:
因为map中value是一个pair对象,set中value就是key,它们的获取方式不一样,所以传这个参数是为了实现仿函数,来取出key值用于比较。

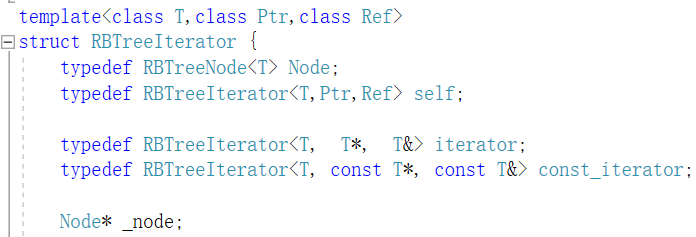
那么了解了这个大体的结构之后,下一个就是要实现我们的迭代器了,我们其实可以在红黑树中实现一个树形的迭代器,然后map和set再封装一层就行了,其实我们的迭代器就是一个类,它用来实现类似于指针的一些操作,所以我们就用指针来当作这个类的成员变量,在这个类的基础上实现迭代器的功能。
在实现迭代器的时候,最关键的一个函数就是重载++,这里迭代器++肯定是按中序,因为这样才有意义,有顺序,那么我们如何通过一个节点找到它的中序遍历的下一个节点呢?这其实是有规律的。比如我们看这样一颗红黑树
首先我们中序遍历是左子树 根 右子树
1.假设这个节点有右子树,那么这个节点之后就是它的右子树的中序的第一个节点,就是右子树中最左边的节点
2.假设这个节点没有右子树,那么走完这个节点以后以这个节点为根的树就走完了,假如它是它父亲的左孩子,那么就该走它的父亲,如果它是它父亲的右孩子,那么它父亲也走完了,就按照此规律走它的爷爷。
有了这个理论基础,我们就可以来实现了。
同样--的话跟++是完全相反的,反过来的遍历顺序就是右子树,根,左子树,然后我们再分别去看这棵树有没有左子树,如果有,那就走左子树中第一个该走的节点,就是左子树中最右节点;如果没有,那就看它是它父亲的什么节点,一直往上找,直到找到它是它父亲的右子树的节点,它父亲就是下一个要遍历的节点。

下面还有一些细节问题,比如说把迭代器写成模板
那么只需要传不同的类型就可以实现const或非const的迭代器
我们const对象要用const版本的迭代器,因为const对象用普通版本的属于权限放大,所以我们要设计const版本的迭代器
我们也要对红黑树的插入函数进行修改,原来插入函数返回一个bool值,但是库中应该是返回一个pair对象,其中first是个迭代器,second是个bool值表示是否新插入
看到这样的代码的时候,这个typename表示后面是一个类型名,因为static静态成员也可以指明类域然后去访问
另外,我们这里为什么传const K呢?因为就算是普通的迭代器我们也不希望key值改变,因为map的key值改了就不满足二叉搜索树了

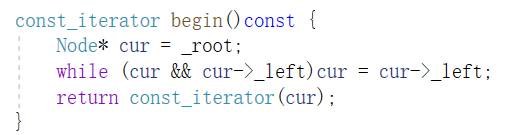
这是如何使用const_iterator,首先s就是一个普通的map对象,就调用普通版本的begin()
调完之后它返回一个iterator,而我们用的const_iterator去接收的,所以要写个构造函数,用普通迭代器构造出const迭代器


那么下面我们再整体的来展示一下红黑树和map set之间的封装关系
这就是如何用红黑树封装出map和set,下面是所有的代码
RBTree.h
#include<iostream>
#include<assert.h>
using namespace std;enum col {RED,BLACK
};
template<class T>
struct RBTreeNode {RBTreeNode(const T& data):_left(nullptr),_right(nullptr),_parent(nullptr),_data(data),_col(RED){}RBTreeNode* _left = nullptr;RBTreeNode* _right = nullptr;RBTreeNode* _parent = nullptr;T _data;col _col=RED;
};
template<class T,class Ptr,class Ref>
struct RBTreeIterator {typedef RBTreeNode<T> Node;typedef RBTreeIterator<T,Ptr,Ref> self;typedef RBTreeIterator<T, T*, T&> iterator;typedef RBTreeIterator<T, const T*, const T&> const_iterator;Node* _node;RBTreeIterator(const iterator& it):_node(it._node) {}RBTreeIterator(Node*node):_node(node){}Ref operator*() {return _node->_data;}Ptr operator->() {return &_node->_data;}bool operator==(const self&s) {return _node == s._node;}bool operator!=(const self& s) {return _node != s._node;}self& operator++() {if (_node == nullptr) {cout << "end()不能++" << endl;assert(false);}if (_node->_right) {//有右子树,那么这个节点之后就是它的右子树的中序的第一个节点,就是右子树中最左边的节点_node = _node->_right;while (_node->_left != nullptr)_node = _node->_left;return *this;}else {//没有右子树,直到找到孩子是父亲左子树的那个父亲节点Node* parent = _node->_parent;while (parent && _node != parent->_left) {parent = parent->_parent;_node = _node->_parent;}_node = parent;return *this;}}self& operator--() {if (_node->_left) {_node = _node->_left;while (_node->_right != nullptr)_node = _node->_right;return *this;}else {Node* parent = _node->_parent;while (parent && _node != parent->_right) {parent = parent->_parent;_node = _node->_parent;}_node = parent;return *this;}}
};template<class K,class V,class Keyofvalue>
class RBTree {typedef RBTreeNode<V> Node;
public:typedef RBTreeIterator<V,V*,V&> iterator;typedef RBTreeIterator<V,const V*,const V&> const_iterator;const_iterator begin()const {Node* cur = _root;while (cur && cur->_left)cur = cur->_left;return const_iterator(cur);}iterator begin() {Node* cur = _root;while (cur&&cur->_left)cur = cur->_left;return iterator(cur);}const_iterator end()const {return const_iterator(nullptr);}iterator end() {return iterator(nullptr);}iterator Find(const K& key) {Keyofvalue kov;Node* cur = _root;while (cur) {if (kov(cur->_data) < key) {cur = cur->_right;}else if (kov(cur->_data) > key) {cur = cur->_left;}else {return iterator(cur);}}return end();}pair<iterator,bool> insert(const V& data) {if (_root == nullptr) {_root = new Node(data);_root->_col = BLACK;return make_pair(iterator(_root),true);}Node* cur = _root;Node* parent = nullptr;Keyofvalue kov;while (cur) {if (kov(cur->_data) < kov(data)) {parent = cur;cur = cur->_right;}else if (kov(cur->_data) > kov(data)) {parent = cur;cur = cur->_left;}else return make_pair(iterator(cur),false);}cur = new Node(data);Node* ret = cur;if (kov(parent->_data) < kov(cur->_data)) {parent->_right = cur;cur->_parent = parent;}else {parent->_left = cur;cur->_parent = parent;}Node* c = cur;Node* p = cur->_parent;Node* g = p->_parent;Node* u = nullptr;while (p && p->_col == RED) {if (p == g->_left)u = g->_right;else u = g->_left;if (u == nullptr || u->_col == BLACK) {if (p == g->_left && c == p->_left) {RotateR(g);p->_col = BLACK;g->_col = RED;}else if (p == g->_right && c == p->_right) {RotateL(g);p->_col = BLACK;g->_col = RED;}else if (p == g->_left && c == p->_right) {RotateL(p);RotateR(g);c->_col = BLACK;g->_col = RED;}else if (p == g->_right && c == p->_left) {RotateR(p);RotateL(g);c->_col = BLACK;g->_col = RED;}else assert(false);break;}else if (u->_col == RED) {p->_col = BLACK;u->_col = BLACK;g->_col = RED;if (g == _root) {g->_col = BLACK;break;}else {c = g;p = c->_parent;g = p->_parent;}}else assert(false);}return make_pair(iterator(ret),true);}void RotateL(Node* parent) {Node* subR = parent->_right;Node* subRL = subR->_left;Node* ppnode = parent->_parent;if (subRL)subRL->_parent = parent;parent->_right = subRL;subR->_left = parent;parent->_parent = subR;if (parent == _root) {_root = subR;subR->_parent = nullptr;}else {subR->_parent = ppnode;if (ppnode->_left == parent)ppnode->_left = subR;else ppnode->_right = subR;}}void RotateR(Node* parent) {Node* subL = parent->_left;Node* subLR = subL->_right;Node* ppnode = parent->_parent;if (subLR)subLR->_parent = parent;parent->_left = subLR;subL->_right = parent;parent->_parent = subL;if (parent == _root) {_root = subL;subL->_parent = nullptr;}else {subL->_parent = ppnode;if (ppnode->_left == parent)ppnode->_left = subL;else ppnode->_right = subL;}}Node* getroot() {return _root;}private:Node* _root = nullptr;
};MySet.h
namespace jxh {template<class T>class set {typedef RBTreeNode<T> Node;struct keyofvalue {const T& operator()(const T&key) {return key;}};void _inorder(Node* root) {if (root == nullptr)return;_inorder(root->_left);cout << root->_data << endl;_inorder(root->_right);}public:typedef typename RBTree<T, const T, keyofvalue>::iterator iterator;typedef typename RBTree<T, const T, keyofvalue>::const_iterator const_iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}const_iterator begin()const{return _t.begin();}const_iterator end()const{return _t.end();}pair<iterator, bool> insert(const T& key){return _t.insert(key);}iterator find(const T& key){return _t.find(key);}void inorder() {_inorder(_t.getroot());}private:RBTree<T,const T,keyofvalue> _t;};MyMap.h
namespace jxh {template<class K,class V>class map {typedef RBTreeNode<pair<K,V>> Node;struct keyofvalue {const K& operator()(const pair<K,V>& kv) {return kv.first;}};void _inorder(Node* root) {if (root == nullptr)return;_inorder(root->_left);cout << root->_data.first<<" "<<root->_data.second << endl;_inorder(root->_right);}public://typedef RBTreeIterator<pair<K,V>> iterator;typedef typename RBTree<K, pair<const K, V>, keyofvalue>::iterator iterator;typedef typename RBTree<K, pair<const K, V>, keyofvalue>::const_iterator const_iterator;const_iterator begin()const {return _t.begin();}const_iterator end() const{return _t.end();}iterator begin() {return _t.begin();}iterator end() {return _t.end();}pair<iterator, bool> insert(const pair<K, V>& kv){return _t.insert(kv);}iterator find(const K& key){return _t.find(key);}V& operator[](const K& key){pair<iterator, bool> ret = insert(make_pair(key, V()));return ret.first->second;}void inorder() {_inorder(_t.getroot());}private:RBTree<K, pair<const K,V>, keyofvalue> _t;};相关文章:
【C++】用红黑树封装map和set
我们之前学的map和set在stl源码中都是用红黑树封装实现的,当然,我们也可以模拟来实现一下。在实现之前,我们也可以看一下stl源码是如何实现的。我们上篇博客写的红黑树里面只是一个pair对象,这对于set来说显然是不合适的ÿ…...

一些好玩的东西
这里写目录标题 递归1.递归打印数组和链表?代码实现原理讲解二叉树的 前 中 后 序位置 参考文章 递归 1.递归打印数组和链表? 平常我们打印数组和链表都是 迭代 就好了今天学到一个新思路–>不仅可以轻松正着打印数组和链表 , 还能轻松倒着打印(用的是二叉树的前中后序遍…...

微电网优化:基于巨型犰狳优化算法(Giant Armadillo Optimization,GAO)的微电网优化(提供MATLAB代码)
一、微电网优化模型 微电网是一个相对独立的本地化电力单元,用户现场的分布式发电可以支持用电需求。为此,您的微电网将接入、监控、预测和控制您本地的分布式能源系统,同时强化供电系统的弹性,保障您的用电更经济。您可以在连接…...

java锁
乐观锁 乐观锁是一种乐观思想,即认为读多写少,遇到并发写的可能性低,每次去拿数据的时候都认为别人不会修改,所以不会上锁,但是在更新的时候会判断一下在此期间别人有没有去更新这个数据,采取在写时先读出…...

QA测试开发工程师面试题满分问答6: 如何判断接口功能正常?从QA的角度设计测试用例
判断接口功能是否正常的方法之一是设计并执行相关的测试用例。下面是从测试QA的角度设计接口测试用例的一些建议,包括功能、边界、异常、链路、上下游和并发等方面: 通过综合考虑这些测试维度,并设计相应的测试用例,可以更全面地评估接口的功能、性能、安全性、数据一致…...

vue 双向绑定
双向绑定:双方其中一方改变,另外一方也会跟着改变。 data() { return {inputValue: ,list: [],message: hello,checked: true,radio: ,select: [],options: [{text: A, value:{value: A}},{text: B, value:{value: B}},{text: C, value:{value: C}}], }…...

python--异常处理
异常处理 例一: try: #可能出现异常代码 except: #如果程序异常,则立刻进入这儿 [finally: #不管是否捕获异常,finally语法快必须要执行!!! #资源关闭,等各种非常重要的操作&…...
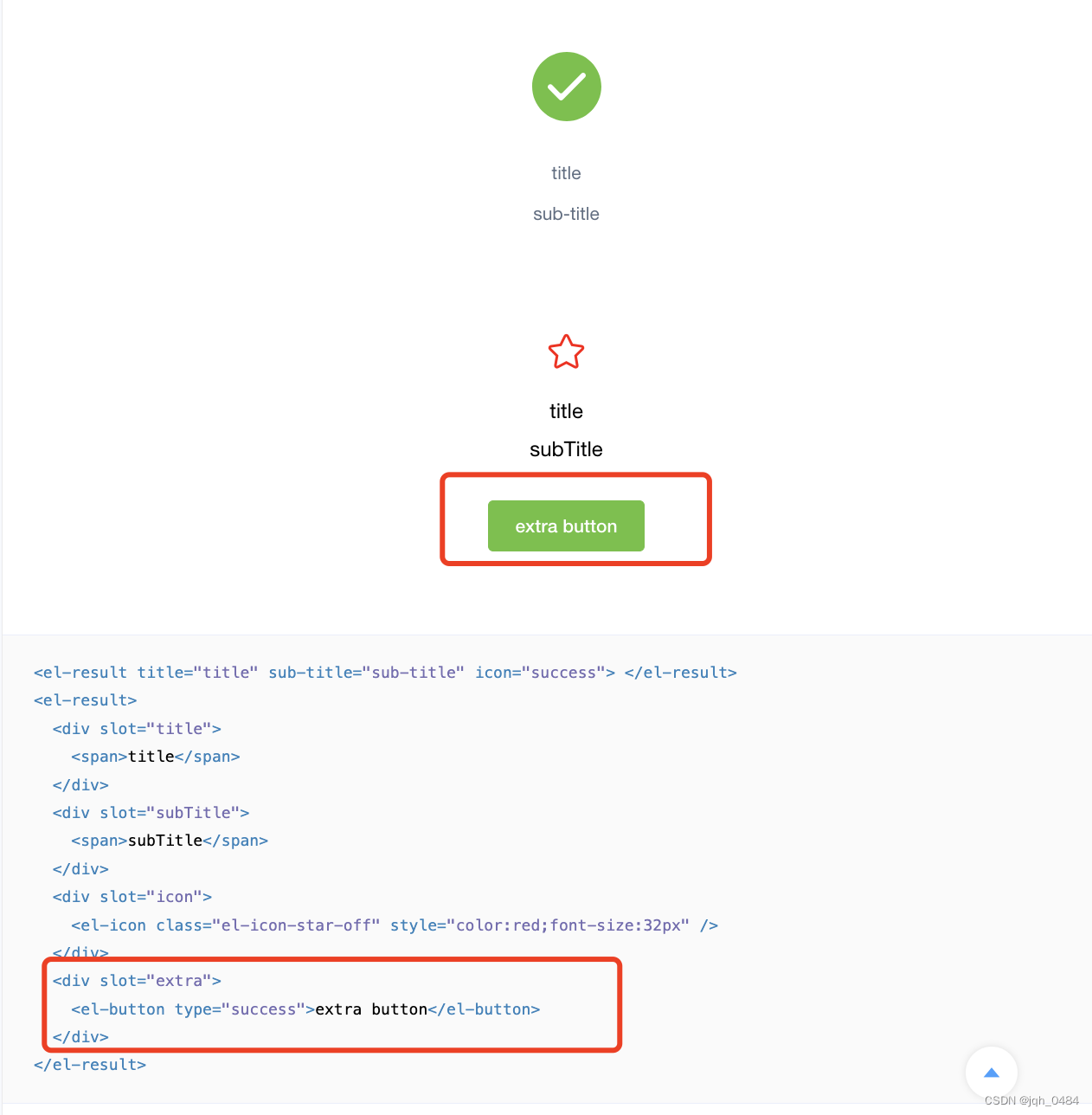
element-ui result 组件源码分享
今日简单分享 result 组件的源码实现,主要从以下三个方面: 1、result 组件页面结构 2、result 组件属性 3、result 组件 slot 一、result 组件页面结构 二、result 组件属性 2.1 title 属性,标题,类型 string,无默…...

VRRP虚拟路由实验(思科)
一,技术简介 VRRP(Virtual Router Redundancy Protocol)是一种网络协议,用于实现路由器冗余,提高网络可靠性和容错能力。VRRP允许多台路由器共享一个虚拟IP地址,其中一台路由器被选为Master,负…...
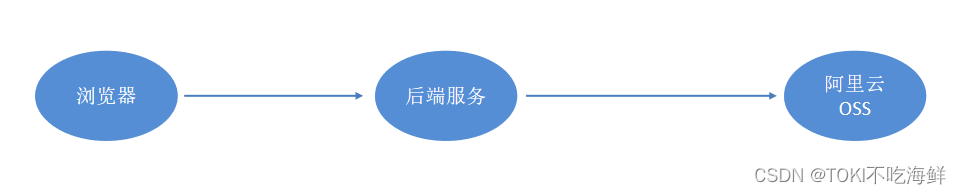
SpringBoot通用模块--文件上传开发(阿里云OSS)
文件上传,是指将本地图片、视频、音频等文件上传到服务器上,可以供其他用户浏览或下载的过程。文件上传在项目中应用非常广泛,我们经常发抖音、发朋友圈都用到了文件上传功能。 实现文件上传服务,需要有存储的支持,那…...

Fecify 商品标签功能
关于商品标签 商品标签是指商家可以在展示商品时,自己创建一个自定义标签,可自定义某个关键词或短语。这样顾客在浏览商城时,只需要通过标签就能看到更直观的展示信息。 商品标签可以按照用户的属性、行为、偏好等进行分类,标签要…...

openstack中windows虚拟机时间显示异常问题处理
文章目录 一、问题描述二、元数据信息总结 一、问题描述 openstack创建出windows虚拟机的时候,发现时间和当前时间相差8小时,用起来很难受。 参考:https://www.cnblogs.com/hraa0101/p/11365238.html 二、元数据信息 通过设置镜像的元数据…...
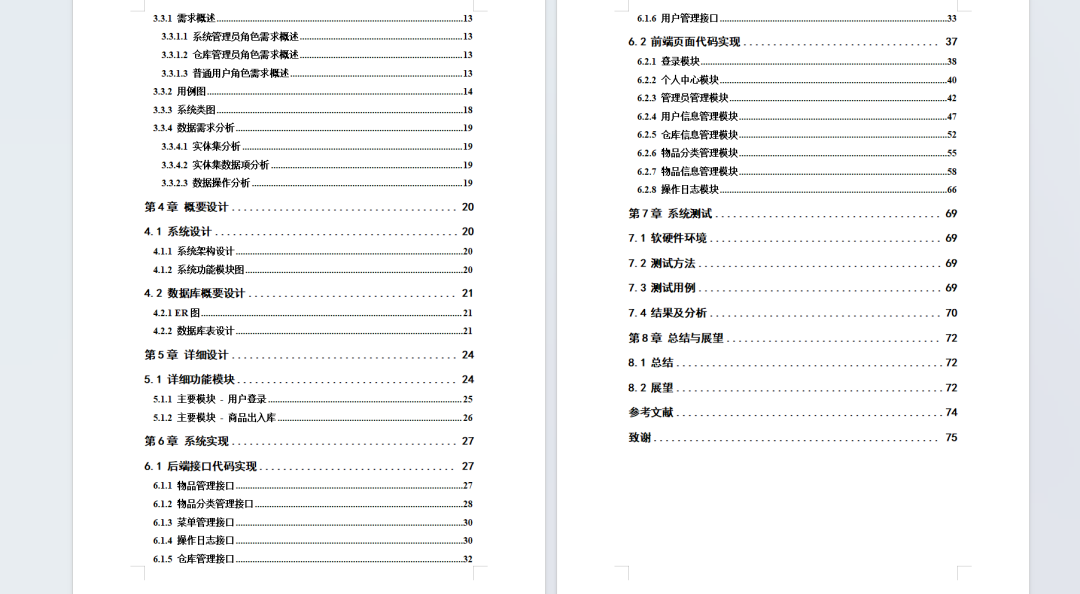
很牛的一套仓库管理系统,免费复用【带源码】
今天给大家分享一套基于SpringbootVue的仓库管理系统源码,在实际项目中可以直接复用。(免费提供,文末自取) 一、系统运行图(设计报告和接口文档) 1、登陆页面 2、物品信息管理 3、设计报告包含接口文档 二、系统搭建视频教程 …...

Spark 部署与应用程序交互简单使用说明
文章目录 前言步骤一:下载安装包Spark的目录和文件 步骤二:使用Scala或PySpark Shell本地 shell 运行 步骤3:理解Spark应用中的概念Spark Application and SparkSessionSpark JobsSpark StagesSpark Tasks 转换、立即执行操作和延迟求值窄变换和宽变换 S…...
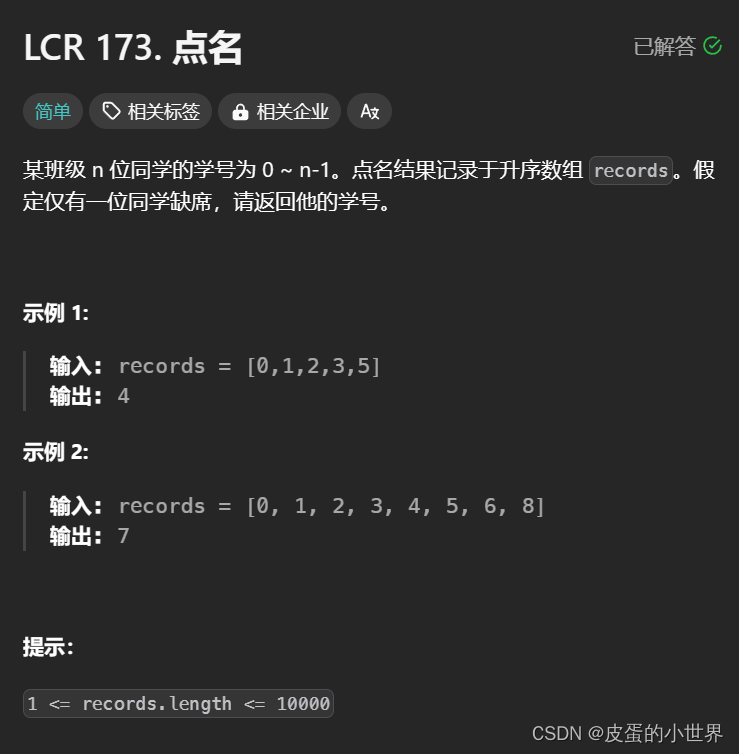
【二分查找】Leetcode 点名
题目解析 LCR 173. 点名 算法讲解 1. 哈希表 class Solution { public:int takeAttendance(vector<int>& nums) {map<int, int> Hash;for(auto n : nums) Hash[n];for(int i 0; i < nums[nums.size() - 1]; i){if(Hash[i] 0)return i;}return nums.si…...

JS中的运算符
1.&& 逻辑与 &&会从左到右执行表达式,直到某个表达式的运行结果返回false,如果全部为true,则返回最后一个中表达式的执行结果 console.log(1 && 2) // 2 console.log(1&&10&&15) // 15 console.log(1&&0&&am…...
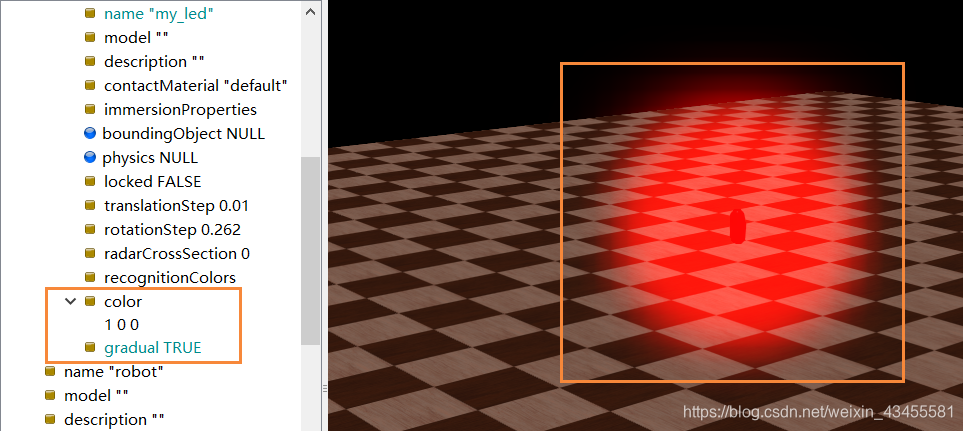
Webots常用的执行器(Python版)
文章目录 1. RotationalMotor2. LinearMotor3. Brake4. Propeller5. Pen6. LED 1. RotationalMotor # -*- coding: utf-8 -*- """motor_controller controller."""from controller import Robot# 实例化机器人 robot Robot()# 获取基本仿真步长…...

mySql数据库学习002-表数据查询操作
表数据查询操作 表数据如下: idnameagegenderclasscreatedAtupdatedAt1张三20男一班2024-04-08 09:15:092024-04-08 09:15:092李四19女一班2024-04-08 09:15:092024-04-08 09:15:093王五21女二班2024-04-08 09:15:092024-04-08 09:15:094赵六18女二班2024-04-08 0…...
【STL】stack与queue的底层原理及其实现
文章目录 stack的介绍库中stack的使用栈的模拟实现queue的介绍库中queue的使用queue的模拟实现 stack的介绍 (图片来自知乎) 1.stack是一种容器适配器,模拟了栈的数据结构。数据只能从一端进去,另一端出来(先进后出&am…...

Ai大模型如何应用到机器视觉系统中
AI大模型在机器视觉系统中的应用可以通过以下几个步骤实现: 1. 数据准备与预处理: - 收集和标注大量高质量的图像数据,这些数据应该覆盖机器视觉系统需要处理的各种场景和对象。 - 对图像数据进行预处理,包括去噪、标准化、增强等…...

如何安全备份微信聊天记录:PyWxDump工具使用全指南
如何安全备份微信聊天记录:PyWxDump工具使用全指南 【免费下载链接】PyWxDump 删库 项目地址: https://gitcode.com/GitHub_Trending/py/PyWxDump 你是否曾因误删重要微信对话而懊悔不已?是否想永久保存珍贵聊天记录却不知从何下手?Py…...

LVGL在无显存TFT屏上的驱动适配:双缓冲与DMA优化实践
1. 项目概述:当TFT屏幕遇上LVGL最近在做一个嵌入式GUI项目,核心任务是把LVGL这个轻量级图形库,适配到一块分辨率不算高但接口比较“个性”的TFT屏幕上。这活儿听起来像是把标准插头插到非标插座上,得自己动手改改线序。LVGL这几年…...

人性最残忍的真相是:你越不把自己当回事,别人就越不把你当回事
那个总给别人买贵东西的人,最后都怎么样了? 目录 那个总给别人买贵东西的人,最后都怎么样了? 我们为什么会忍不住过度付出? 真正的爱,从来都不是单方面的牺牲 爱自己,是所有健康关系的前提 昨天刷到一句话,瞬间戳中了我:“永远不要拿自己辛苦钱,去给别人买自己都舍不…...

FPGA与GPU在OSOS-ELM算法中的性能对比与优化
1. 项目概述在边缘计算和实时信号处理领域,极端学习机(ELM)因其独特的训练机制和高效的计算性能而备受关注。OSOS-ELM作为ELM的一种变体,通过在线顺序学习机制进一步提升了算法的实用性。这项研究聚焦于FPGA和GPU两种硬件平台在执行OSOS-ELM算法时的性能…...

【目标检测系统网页版】基于YOLOv8的淡水鱼检测系统
【目标检测系统网页版】基于YOLOv8的淡水鱼检测系统 一、系统介绍 1、系统简介 基于YOLOv8的淡水鱼检测 Web 系统,支持单图检测、批量图片检测、视频检测与实时视频流检测。 2、功能特性 智能识别:YOLOv8 封装,单例加载,自动设…...

046、PCIE桥设备与交换:当拓扑开始复杂起来
046、PCIE桥设备与交换:当拓扑开始复杂起来 最近在调一块自定义的PCIE扩展板,系统里突然出现了几个“神秘”的端点设备。在lspci列表里,它们出现在一个我从未配置过的总线号上,而且设备ID全对不上。折腾了两天才发现,原…...

VTube Studio完整指南:从零开始打造你的虚拟主播形象
VTube Studio完整指南:从零开始打造你的虚拟主播形象 【免费下载链接】VTubeStudio VTube Studio API Development Page 项目地址: https://gitcode.com/gh_mirrors/vt/VTubeStudio 想要成为一名虚拟主播,却担心技术门槛太高?VTube St…...

2025最权威的五大降重复率方案推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 处于学术探索的终点之处,一篇出色的毕业论文乃是知识跟汗水所凝结而成的&#x…...

Ubuntu中ping命令安装与网络诊断全攻略
1. 项目概述:一个看似简单却暗藏玄机的问题“如何在Ubuntu中安装ping”,这个标题乍一看,可能会让很多老手会心一笑,甚至觉得有些“小白”。但恰恰是这个看似基础到不能再基础的问题,却是我在多年运维和开发工作中&…...

FSearch终极指南:如何在Linux上实现秒级文件搜索
FSearch终极指南:如何在Linux上实现秒级文件搜索 【免费下载链接】fsearch A fast file search utility for Unix-like systems based on GTK3 项目地址: https://gitcode.com/gh_mirrors/fs/fsearch 还在为Linux系统中查找文件而烦恼吗?FSearch是…...