Webots常用的执行器(Python版)
文章目录
- 1. RotationalMotor
- 2. LinearMotor
- 3. Brake
- 4. Propeller
- 5. Pen
- 6. LED
1. RotationalMotor
# -*- coding: utf-8 -*-
"""motor_controller controller."""from controller import Robot# 实例化机器人
robot = Robot()# 获取基本仿真步长
timestep = int(robot.getBasicTimeStep())# 关联设备
motor = robot.getMotor('my_Rmotor')# 设置电机运行模式为速度模式
motor.setPosition(float('inf'))
motor.setVelocity(1)# Main loop:
while robot.step(timestep) != -1:pass
2. LinearMotor
# -*- coding: utf-8 -*-
"""linear motor controller."""from controller import Robot
import mathrobot = Robot()
timestep = int(robot.getBasicTimeStep())motor = robot.getMotor('my_lMotor')
#motor.setPosition(float('inf'))
#motor.setVelocity(0)# Main loop:
count = 0
while robot.step(timestep) != -1:#motor.setVelocity(1)motor.setPosition(math.sin(count)*0.5)count += 0.1
3. Brake
setDampingConstant(dampingConstant)函数设置关节的阻尼常数(单位Ns/m或者Nms),如果JointParameters设置了阻尼常数,那么所产生的的dampingConstant系数是JointParameters中的dampingConstant与使用该函数所设置的dampingConstant的和。即:
实际作用的 d a m p i n g C o n s t a n t = J o i n t 中的 d a m p i n g C o n s t a n t + F u n c t i o n 设置的 d a m p i n g C o n s t a n t 实际作用的dampingConstant = Joint中的dampingConstant + Function设置的dampingConstant 实际作用的dampingConstant=Joint中的dampingConstant+Function设置的dampingConstant
# -*- coding: utf-8 -*-
"""brake controller."""from controller import Robot
from controller import Motor
from controller import Brakerobot = Robot()timestep = int(robot.getBasicTimeStep())motor = robot.getMotor('my_Rmotor')
#motor.enableTorqueFeedback(timestep)
brake = robot.getBrake('my_brake')motor.setTorque(0)# Main loop:
count = 0
while robot.step(timestep) != -1:count += 1print(count)#print("motor torque"+str(motor.getTorqueFeedback()))motor.setTorque(0.5)if count > 50:brake.setDampingConstant(1)if count >300:count = 0brake.setDampingConstant(0)
4. Propeller

- 合成推力计算: T = t 1 ∗ ∣ o m e g a ∣ ∗ o m e g a − t 2 ∗ ∣ o m e g a ∣ ∗ V T = t1 * |omega| * omega - t2 * |omega| * V T=t1∗∣omega∣∗omega−t2∗∣omega∣∗V
其中thrustConstants中定义的两个常数为式中的t1和t2,omega为电机角速度,V是推力中心沿轴心线速度的分量。推力施加在centerOfThruse中指定的点上 - 合成力矩计算: Q = q 1 ∗ ∣ o m e g a ∣ ∗ o m e g a − q 2 ∗ ∣ o m e g a ∣ ∗ V Q = q1 * |omega| * omega - q2 * |omega| * V Q=q1∗∣omega∣∗omega−q2∗∣omega∣∗V
其中q1和q2为torqueConstants中定义的常数
以上公式计算来自:Thor I. Fossen的"Guidance and Control of Ocean Vehicles"和Raymond W. Prouty的"Helicopter Performance, Stability, and Control"
几个重要节点:
shaftAxis:定义沿其施加合力和扭矩的轴centerOfThrust:定义推力的施加点thrustConstants:定义推力计算公式中的两个常数,正旋与反旋只需将此字段中的数值设置为相反数。即正旋时,此字段数值为正,那么反旋则为此数值的负值即可torqueConstants:定义转矩计算公式中的两个常数
thrustConstants和torqueConstants中的常数,在现实中,其数值由螺旋桨的倾角和方向决定
fastHelixThreshold:从slowHelix切换到fastHelix阀值,默认为24π rad/sdevice:旋转电机放置的设备节点fastHelix和slowHelix:如果不为NULL,那么必须使用Solid节点设置这些属性;如果 ∣ o m e g a ∣ > f a s t H e l i x T h r e s h o l d |omega|>fastHelixThreshold ∣omega∣>fastHelixThreshold,那么只有在fastHelix中定义的Solid是可见的,反之则只有在slowHelix中定义的Solid是可见的。
5. Pen
比较重要,通常用于显示机器人的移动轨迹,笔的绘制方向与节点-y向重合
几个重要节点:
inkColor:定义笔迹颜色,可通过函数定义/修改inkDensity:定义颜色密度,在[0,1]之间leadSize:定义笔迹宽度maxDistance:定义笔与绘制表明之间最大距离,该值≤0表示绘制距离无限write:使能笔的书写功能,可由函数控制WorldInfo节点的inkEvaporation控制墨水消失的速度
遗憾的是,貌似只能在对象上绘制
6. LED
LED虽然在实际控制中没什么作用,但是通过LED的灯光显示我们可以传递一些信息,尤其是在实际机器人当中。
-
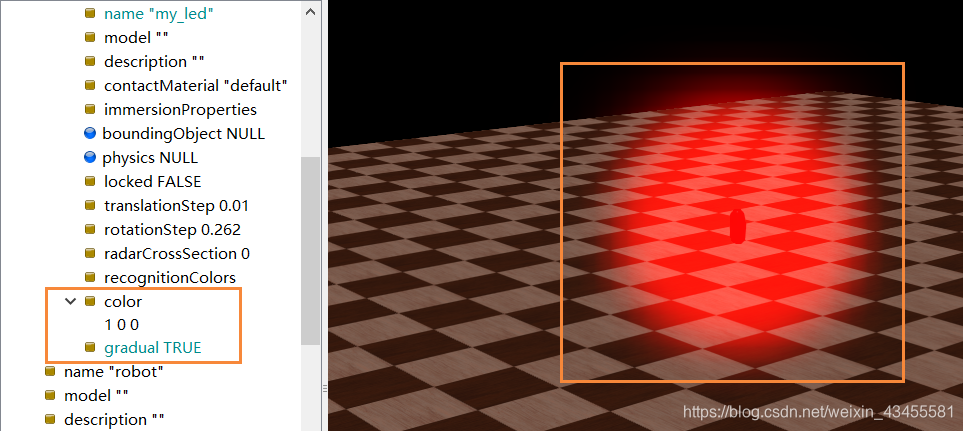
① 颜色设置在
LED节点下的color设置 -
②
LED.set(2)时,打开第二种颜色注意,设置的值不能超过
color中设置的颜色种类 -
③
gradual节点定义LED节点的类型。若gradual=TRUE,color列表为空,则为RGB LED,set()函数此时接收的值为十六进制RGB颜色值(即R8G8B8),例如红色为0xff0000;gradual=FALSE,包含只有一种颜色,则为单色LED;包含多种颜色,则为多色LED;
"""LED_controller controller."""from controller import Robotrobot = Robot()
timestep = int(robot.getBasicTimeStep())LED = robot.getLED('my_led')# Main loop:
count = 0
while robot.step(timestep) != -1:count += 1print(count)print("LED状态:" + str(LED.get()))if count > 20:LED.set(1)# 打开LED,强度255if count > 40:LED.set(0)# 关闭LED,强度0count = 0
# Main loop:
count = 0
while robot.step(timestep) != -1:count += 1print(count)print("LED状态:" + str(LED.get()))if count > 20:LED.set(0xff0000)if count > 40:LED.set(0x00ff00)if count > 60:LED.set(0)count = 0
如果
gradual=TRUE,而color值又非空,那么通过十六进制设置灯光颜色时,LED会发处一个光团,且颜色为color列表的第一种
参考文献:
- https://cyberbotics.com/doc/reference/index
相关文章:
Webots常用的执行器(Python版)
文章目录 1. RotationalMotor2. LinearMotor3. Brake4. Propeller5. Pen6. LED 1. RotationalMotor # -*- coding: utf-8 -*- """motor_controller controller."""from controller import Robot# 实例化机器人 robot Robot()# 获取基本仿真步长…...

mySql数据库学习002-表数据查询操作
表数据查询操作 表数据如下: idnameagegenderclasscreatedAtupdatedAt1张三20男一班2024-04-08 09:15:092024-04-08 09:15:092李四19女一班2024-04-08 09:15:092024-04-08 09:15:093王五21女二班2024-04-08 09:15:092024-04-08 09:15:094赵六18女二班2024-04-08 0…...
【STL】stack与queue的底层原理及其实现
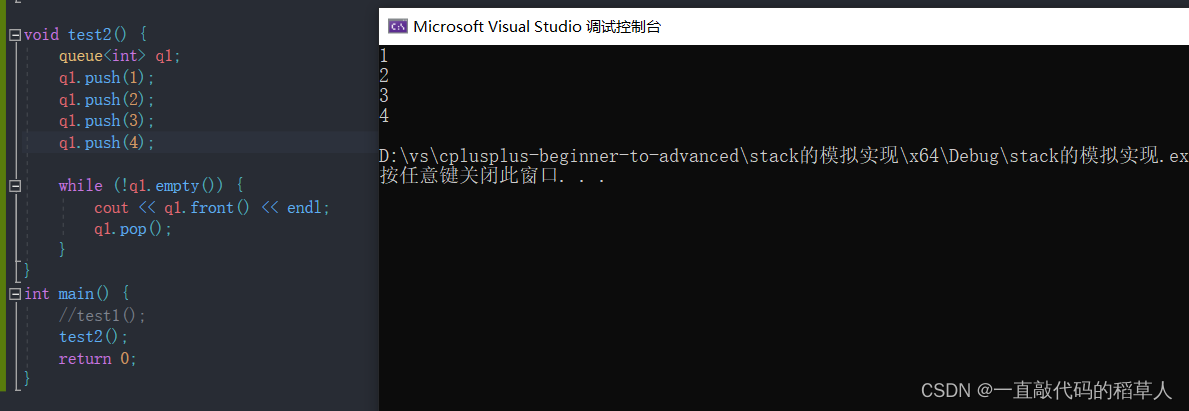
文章目录 stack的介绍库中stack的使用栈的模拟实现queue的介绍库中queue的使用queue的模拟实现 stack的介绍 (图片来自知乎) 1.stack是一种容器适配器,模拟了栈的数据结构。数据只能从一端进去,另一端出来(先进后出&am…...

Ai大模型如何应用到机器视觉系统中
AI大模型在机器视觉系统中的应用可以通过以下几个步骤实现: 1. 数据准备与预处理: - 收集和标注大量高质量的图像数据,这些数据应该覆盖机器视觉系统需要处理的各种场景和对象。 - 对图像数据进行预处理,包括去噪、标准化、增强等…...
)
IntelliJ IDEA下载及安装教程(Windows操作系统)
一、下载IntelliJ IDEA 1、访问JetBrains官方网站 打开浏览器,输入网址 https://www.jetbrains.com/idea/ 进入IntelliJ IDEA官方主页。 2、选择产品版本 IntelliJ IDEA分为免费的Community Edition(社区版)和付费的Ultimate Edition&…...

01 Python进阶:正则表达式
re.match函数 使用 Python 中的 re 模块时,可以通过 re.match() 函数来尝试从字符串的开头匹配一个模式。以下是一个简单的详解和举例: import re# 定义一个正则表达式模式 pattern r^[a-z] # 匹配开头的小写字母序列# 要匹配的字符串 text "h…...

pdf图片识别分类
文章目录 解析pdf数据ocr识别分类方法正则匹配词频统计分类模型 分类完提示 解析pdf数据 试了几种方法 fitz-get_image后面方法不适用,用pixmap分辨率低 用pypdf2版本低方法用不了 用pdf2image还要下依赖工具 用spire.pdf的SaveAsImage分辨率低,Extract…...
)
24双非考研哈尔滨工程大学计算机(@程程笔记)
前言 个人情况,本科双非考研软件工程。24考研成绩总分369(政治75,英语58,数学102,专业课134),整体各科成绩比较均衡,没有太突出和瘸腿的,初始排名5/19,复试后排名5/13。 政治 政治…...
IO流(2.其他流)
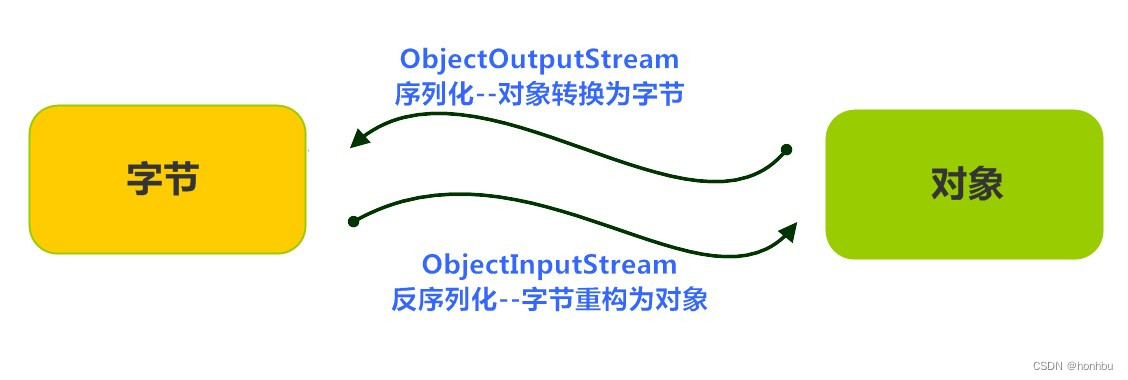
能够高效读写的缓冲流,能够转换编码的转换流,能够持久化存储对象的序列化流 一、缓冲流 缓冲流,也叫高效流,是对4个基本的FileXxx 流的增强,所以也是4个流,按照数据类型分类: 字节缓冲流:Buffe…...

PyTorch之计算模型推理时间
一、参考资料 如何测试模型的推理速度 Pytorch 测试模型的推理速度 二、计算PyTorch模型推理时间 1. 计算CPU推理时间 import torch import torchvision import time import tqdm from torchsummary import summarydef calcCPUTime():model torchvision.models.resnet18()…...
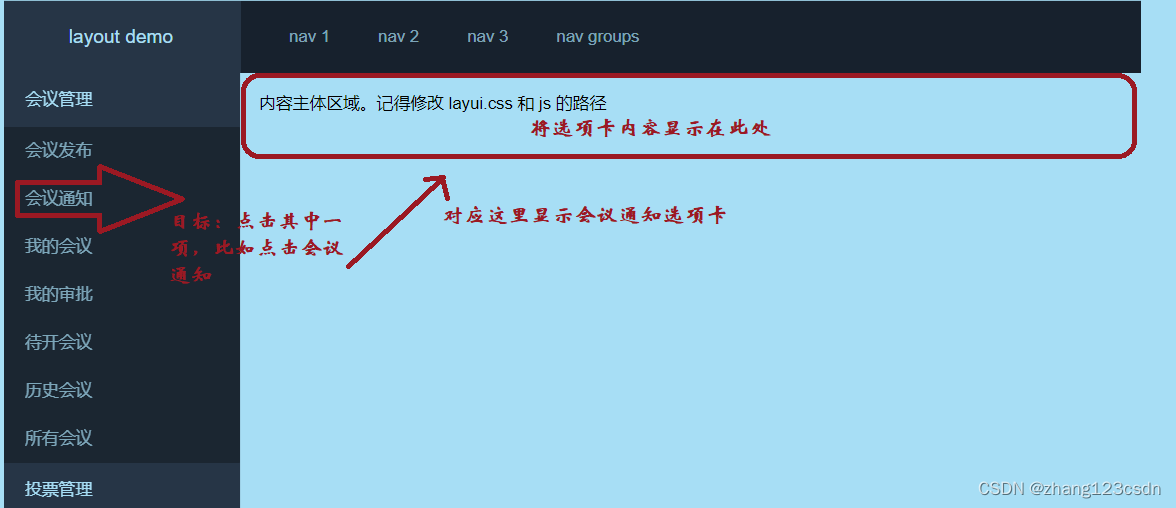
layui后台框架,将左侧功能栏目 集中到一个页面,通过上面的tab切换 在iframe加载对应页面
实现上面的 功能效果。 1 html代码 <form class"layui-form layui-form-pane" action""><div class"layui-tab" lay-filter"demo"><ul class"layui-tab-title"><li id"a0" class"lay…...
【网络原理】使用Java基于TCP搭建简单客户端与服务器通信
目录 🎄API介绍🌸ServerSocket API🌸Socket API 🍀TCP中的长短连接🌳建立TCP回显客户端与服务器🌸TCP搭建服务器🌸TCP搭建客户端 ⭕总结 TCP服务器与客户端的搭建需要借助以下API 🎄…...

Hadoop生态系统主要是什么?
Hadoop生态系统主要由以下几部分组成: Hadoop HDFS:这是Hadoop的核心组件之一,是一个用于存储大数据的分布式文件系统。它可以在廉价的硬件上提供高度的容错性,通过数据复制和故障切换实现数据的高可用性。 MapReduce:…...

GlusterFS分布式文件系统
前言 存储可分为文件存储和对象存储,常见的文件存储相关技术有:nfs、lvm、raid;常见的对象存储相关技术有:gfs、ceph、fdfs、nas、oss、s3、switch。GlusterFS 归类为文件存储系统,它提供了一种强大的方式来管理和存储…...

spark本地模拟多个task时如何启动多个Excutor
1、首先在9090端口下启动Excutor,作为第一个Excutor 2、然后修改9090端口为:9091,如下图点击Edit Configration 3、然后按下图操作 , 4、修改一下名字 5、点击apply,🆗 6、检查下面圈1是否是刚刚我们新建的MyExcutor(2…...
SpringBoot整合RocketMQ广播消费消息)
RocketMQ笔记(八)SpringBoot整合RocketMQ广播消费消息
目录 一、简介1.1、消费模式 二、消费者2.1、maven依赖2.2、application配置2.3、消费监听 三、生产者3.1、发送消息3.2、运行结果 四、其他 一、简介 在之前的文章中,我们讲过了,同步发送单条消息,异步发送单条消息,发送单向消息…...

Appium如何自动判断浏览器驱动
问题:有的测试机chrome是这个版本,有的是另一个版本,怎么能让自动判断去跑呢?? 解决办法:使用appium的chromedriverExecutableDir和chromedriverChromeMappingFile 切忌使用chromedriverExecutableDir和c…...

MVCC-多版本并发控制
MVCC(多版本并发控制)简介 在数据库系统中,并发控制是一个非常重要的话题。为了提高系统的并发性能和吞吐量,现代数据库系统通常使用多种技术来实现对数据的安全访问,其中一种重要的技术就是多版本并发控制࿰…...

c++找最高成绩
根据给定的程序,写成相关的成员函数,完成指定功能。 函数接口定义: 定义max函数,实现输出最高成绩对应的学号以及最高成绩值。 裁判测试程序样例: #include <iostream> using namespace std; class Student{…...

前端saas化部署
在项目中难免会遇到一些特殊的需求,例如同一套代码需要同时部署上两个不同的域名A和B。A和B的不同之处仅在于,例如一些背景图片,logo,展示模块的不同,其他业务逻辑是和展示模块是完全一样的。此时我们当然可以考虑单独…...

CoPaw:让AI代码助手深度适配个人项目与团队规范的工程化实践
1. 项目概述与核心价值最近在折腾一个挺有意思的开源项目,叫CoPaw,作者是 alexgzx。光看名字可能有点摸不着头脑,但如果你对 AI 辅助编程、代码生成或者想提升自己的开发效率感兴趣,那这个项目绝对值得你花时间研究一下。简单来说…...

开源机械爪控制库:从PID算法到ROS集成的全栈开发指南
1. 项目概述:一个开源的机械爪设计与控制库最近在机器人硬件开发的圈子里,开源项目“MeyerZhou/openclaw”引起了不少创客和机器人爱好者的注意。简单来说,这是一个专注于机械爪(或称机械手、夹爪)设计与控制的代码库和…...

平衡车PID积分饱和问题
你发现了PID最致命的坑! 你说的完全正确:积分(Ki)是累加的,会无限叠加,直接让PWM爆掉、车猛冲、失控! 这就是积分饱和 —— 99%初学者死在这里。 我现在彻底讲透积分为什么炸、怎么修复、平衡车…...

Go语言缓存雪崩:防止缓存失效
Go语言缓存雪崩:防止缓存失效 1. 雪崩防护 type CacheWithProtection struct {cache *RedisCachemu sync.Mutexlocks map[string]*sync.Mutex }func NewCacheWithProtection(cache *RedisCache) *CacheWithProtection {return &CacheWithProtect…...

DLP/SLA光固化3D打印技术解析与Ember打印机实战指南
1. DLP/SLA 3D打印技术深度解析:从光与树脂的对话说起如果你是从FDM(熔丝制造)打印转向树脂打印的,那感觉就像从开手动挡卡车换到了开精密数控机床。DLP(数字光处理)和SLA(立体光刻)…...

Python自动化股票分析工具:从数据采集到可视化报告全流程实战
1. 项目概述:一个面向个人投资者的自动化股票分析工具如果你和我一样,是个对A股市场有点兴趣,但又没时间天天盯盘的上班族,那你肯定也经历过这种纠结:早上开盘前想看看心仪的几只股票有没有什么异动,结果一…...

AI编程助手CodeBuddy:VS Code扩展的架构、部署与高效使用指南
1. 项目概述:CodeBuddy,你的AI编程伙伴最近在GitHub上看到一个挺有意思的项目,叫codebuddy,作者是olasunkanmi-SE。光看名字就能猜个大概——“代码伙伴”,这显然是一个旨在辅助编程的工具。作为一个在开发一线摸爬滚打…...

基于CircuitPython与加速度计的魔法9号球:嵌入式交互项目实践
1. 项目概述:当硬件遇上玄学,用代码打造你的专属“决策神器”在嵌入式开发的世界里,我们常常与传感器、显示屏和逻辑代码打交道,构建着一个个解决实际问题的智能设备。但谁说硬件项目就一定要严肃刻板?今天,…...

Arduino驱动128x64 VFD显示屏:SPI像素回读与图形应用实战
1. 项目概述:为什么选择128x64图形VFD?如果你玩过各种OLED、LCD或者TFT屏幕,可能会觉得显示技术已经足够成熟,亮度、对比度似乎都够用。但当你第一次点亮一块真空荧光显示屏时,那种独特的、带着一丝复古科技感的蓝色辉…...
)
ElevenLabs克隆成功率从31%飙升至96.7%:基于LPC共振峰校准+Prosody Transfer双引擎微调法(实测数据包已脱敏上传)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs语音克隆方法概览 ElevenLabs 提供了高保真、低延迟的语音克隆能力,其核心依赖于少量高质量语音样本(通常 1–3 分钟)与上下文感知的零样本/少样本微调技术…...