C++ GDAL提取多时相遥感影像中像素随时间变化的数值数组
本文介绍基于C++语言GDAL库,批量读取大量栅格遥感影像文件,并生成各像元数值的时间序列数组的方法。
首先,我们来明确一下本文所需实现的需求。现在有一个文件夹,其中包含了很多不同格式的文件,如下图所示。

其中,我们首先需要遍历这一文件夹,遴选出其中所有类型为.bmp格式的栅格遥感影像文件(一共有6个),并分别读取文件(已知这些遥感影像的行数、列数都是一致的);随后,将不同遥感影像的同一个位置的像素的数值进行分别读取,并存储在一个数组中。例如,最终我们生成的第一个数组,其中共有6个元素,分别就是上图所示文件夹中6景遥感影像各自(0,0)位置的像元数值;生成的第二个数组,其中也是6个元素,分别就是6景遥感影像各自(1,0)位置的像元数值,以此类推。其中,显然我们得到的数组个数,就是遥感影像像元的个数。此外,这里6景遥感影像的排序,是按照文件名称的升序来进行的。
明确了具体需求,接下来就可以开始代码的实践。其中,本文分为两部分,第一部分为代码的分段讲解,第二部分为完整代码。
此外,本文是基于GDAL库来实现栅格数据读取的;具体GDAL库的配置方法大家可以参考文章在Visual Studio中部署GDAL库的C++版本(包括SQLite、PROJ等依赖)。
1 代码分段介绍
1.1 代码准备
这一部分主要是代码的头文件、命名空间与我们自行撰写的自定义函数get_need_file()的声明;具体代码如下所示。
#include <iostream>
#include <vector>
#include <io.h>
#include "gdal_priv.h"using namespace std;void get_need_file(string path, vector<string>& file, string ext);
其中,由于我们在接下来的代码中需要用到容器vector这一数据类型,因此首先需要添加#include <vector>;同时,我们在接下来的代码中需要用到头文件io.h中的部分函数(主要都是一些与计算机系统、文件管理相关的函数),因此需要添加#include <io.h>;此外,我们是基于GDAL库来实现栅格数据读取的,因此需要添加#include "gdal_priv.h"。
接下来,这里声明了一个自定义函数get_need_file(),具体我们在本文1.2部分介绍。
1.2 栅格文件筛选
由于我这里几乎将全部的代码都放在了主函数中,因此这一部分就先介绍代码main()函数的第一部分,亦即栅格文件的遴选部分;具体代码如下所示。
int main() {string file_path = R"(E:\02_Project\02_ChlorophyllProduce\01_Data\00_Test)";vector<string> my_file;string need_extension = ".bmp";get_need_file(file_path, my_file, need_extension);int file_size = my_file.size();if (file_size == 0){cout << "No file can be found!" << endl;}else{cout << "Find " << file_size << " file(s).\n" << endl;}
这一部分主要就是做好调用自定义函数get_need_file()的变量准备,并调用get_need_file()函数,得到指定文件夹下的栅格文件;随后,将栅格文件的筛选结果进行输出。这一部分的具体代码介绍,大家查看文章C++遴选出特定类型的文件或文件名符合要求的文件即可,这里就不再赘述。
1.3 栅格文件读取
这一部分主要是基于GDAL库,循环读取前述文件夹中的每一个栅格遥感影像文件。
int nXSize, nYSize;float** pafScanline = new float* [file_size];int pic_index = 1;for (auto x : my_file){GDALDataset* poDataset;GDALAllRegister();CPLSetConfigOption("GDAL_FILENAME_IS_UTF8", "NO");poDataset = (GDALDataset*)GDALOpen(x.c_str(), GA_ReadOnly);if (poDataset == NULL){cout << "Open File " << x << " Error!" << endl;}else{cout << "Open File " << x << " Success!" << endl;}GDALRasterBand* poBand;poBand = poDataset->GetRasterBand(1);nXSize = poBand->GetXSize();nYSize = poBand->GetYSize();cout << nXSize << "," << nYSize << "\n" << endl;pafScanline[pic_index - 1] = new float[nXSize * nYSize];poBand->RasterIO(GF_Read, 0, 0, nXSize, nYSize, pafScanline[pic_index - 1], nXSize, nYSize, GDT_Float32, 0, 0);pic_index ++;}
其中,nXSize与nYSize分别表示栅格遥感影像的列数与行数,pafScanline是我们读取栅格遥感影像文件所需的变量,之后读取好的遥感影像数据就会存放在这里;由于我们有多个栅格文件需要读取,因此通过for循环来实现批量读取的操作,并通过pic_index这个变量作为每一次读取文件的计数。
在这里,float** pafScanline = new float* [file_size];这句代码表示我们将pafScanline作为一个指向指针的指针的数组;在后期读取遥感影像数据后,pafScanline[0]、pafScanline[1]一直到pafScanline[5],这6个数值同样分别是指针,分别指向存储6景遥感影像数据的地址。这里我们通过new实现对pafScanline内存的动态分配,因为我们在获取栅格遥感影像的景数(也就是文件夹中栅格遥感影像文件的个数)之前,也不知道具体需要给pafScanline这一变量分配多少的内存。此外,在for循环中,我们还对pafScanline[0]、pafScanline[1]一直到pafScanline[5]同样进行了动态内存分配,因为我们在获取每一景栅格遥感影像的行数与列数之前,同样是不知道需要给pafScanline[x]这6个数组变量分配多少内存的。
随后,for循环中的其他部分,就是GDAL库读取遥感影像的基本代码。读取第一景遥感影像数据后,我们将数据保存至pafScanline[0],并随后进行第二次循环,读取第二景遥感影像数据,并将其数据保存至pafScanline[1]中,随后再次循环;以此类推,直至读取6景遥感影像完毕。
如果大家只是需要实现C++批量读取栅格遥感影像数据,那么以上操作就已经实现了大家的需求。其中,显然pafScanline[0]就是第一景遥感影像数据,pafScanline[1]就是第二景遥感影像数据,pafScanline[2]就是第三景遥感影像数据,以此类推。
1.4 像元时间序列数组生成
这一部分则是基于以上获取的各景遥感影像数据读取结果,进行每一个像元数值的时间序列数组生成。
float** pixel_paf = new float* [nXSize * nYSize];for (int pixel_num = 0; pixel_num < nXSize * nYSize; pixel_num++){pixel_paf[pixel_num] = new float[file_size];for (int time_num = 0; time_num < file_size; time_num++){pixel_paf[pixel_num][time_num] = pafScanline[time_num][pixel_num];}}
这一部分的代码思路其实也非常简单,就是通过两个for循环,将原本一共6个的、每一个表示每一景遥感影像中全部数据的数组,转变为一共X个的(X表示每一景遥感影像的像元总个数)、每一个表示每一个位置的像元在6景遥感影像中的各自数值的数组。
在这里,由于同样的原因,我们对pixel_paf亦进行了内存的动态分配。
1.5 输出测试与代码收尾
这一部分主要是输出一个我们刚刚配置好的像元数值时间序列数组,从而检查代码运行结果是否符合我们的要求;此外,由于前面我们对很多变量进行了动态内存分配,因此需要将其delete掉;同时,这里还可以对前面我们定义的指向指针的指针赋值为NULL,这样子其就不能再指向任何地址了,即彻底将其废除。
for (int i = 0; i < file_size; i++){cout << pixel_paf[0][i] << "," << endl;}delete[] pafScanline;delete[] pixel_paf;pafScanline = NULL;pixel_paf = NULL;return 0;
}
至此,代码的主函数部分结束。
1.6 自定义函数
这一部分是我们的自定义函数get_need_file()。
void get_need_file(string path, vector<string>& file, string ext)
{intptr_t file_handle = 0;struct _finddata_t file_info;string temp;if ((file_handle = _findfirst(temp.assign(path).append("/*" + ext).c_str(), &file_info)) != -1){do{file.push_back(temp.assign(path).append("/").append(file_info.name));} while (_findnext(file_handle, &file_info) == 0);_findclose(file_handle);}
}
如前所述,这一部分的具体代码介绍,大家查看文章C++遴选出特定类型的文件或文件名符合要求的文件即可,这里就不再赘述。
2 完整代码
本文所需用到的完整代码如下所示。
#include <iostream>
#include <vector>
#include <io.h>
#include "gdal_priv.h"using namespace std;void get_need_file(string path, vector<string>& file, string ext);int main() {string file_path = R"(E:\02_Project\02_ChlorophyllProduce\01_Data\00_Test)";vector<string> my_file;string need_extension = ".bmp";get_need_file(file_path, my_file, need_extension);int file_size = my_file.size();if (file_size == 0){cout << "No file can be found!" << endl;}else{cout << "Find " << file_size << " file(s).\n" << endl;}int nXSize, nYSize;float** pafScanline = new float* [file_size];int pic_index = 1;for (auto x : my_file){GDALDataset* poDataset;GDALAllRegister();CPLSetConfigOption("GDAL_FILENAME_IS_UTF8", "NO");poDataset = (GDALDataset*)GDALOpen(x.c_str(), GA_ReadOnly);if (poDataset == NULL){cout << "Open File " << x << " Error!" << endl;}else{cout << "Open File " << x << " Success!" << endl;}GDALRasterBand* poBand;poBand = poDataset->GetRasterBand(1);nXSize = poBand->GetXSize();nYSize = poBand->GetYSize();cout << nXSize << "," << nYSize << "\n" << endl;pafScanline[pic_index - 1] = new float[nXSize * nYSize];poBand->RasterIO(GF_Read, 0, 0, nXSize, nYSize, pafScanline[pic_index - 1], nXSize, nYSize, GDT_Float32, 0, 0);pic_index ++;}float** pixel_paf = new float* [nXSize * nYSize];for (int pixel_num = 0; pixel_num < nXSize * nYSize; pixel_num++){pixel_paf[pixel_num] = new float[file_size];for (int time_num = 0; time_num < file_size; time_num++){pixel_paf[pixel_num][time_num] = pafScanline[time_num][pixel_num];}}for (int i = 0; i < file_size; i++){cout << pixel_paf[0][i] << "," << endl;}delete[] pafScanline;delete[] pixel_paf;pafScanline = NULL;pixel_paf = NULL;return 0;
}void get_need_file(string path, vector<string>& file, string ext)
{intptr_t file_handle = 0;struct _finddata_t file_info;string temp;if ((file_handle = _findfirst(temp.assign(path).append("/*" + ext).c_str(), &file_info)) != -1){do{file.push_back(temp.assign(path).append("/").append(file_info.name));} while (_findnext(file_handle, &file_info) == 0);_findclose(file_handle);}
}
当我们运行上述代码后,将会出现如下所示的界面。
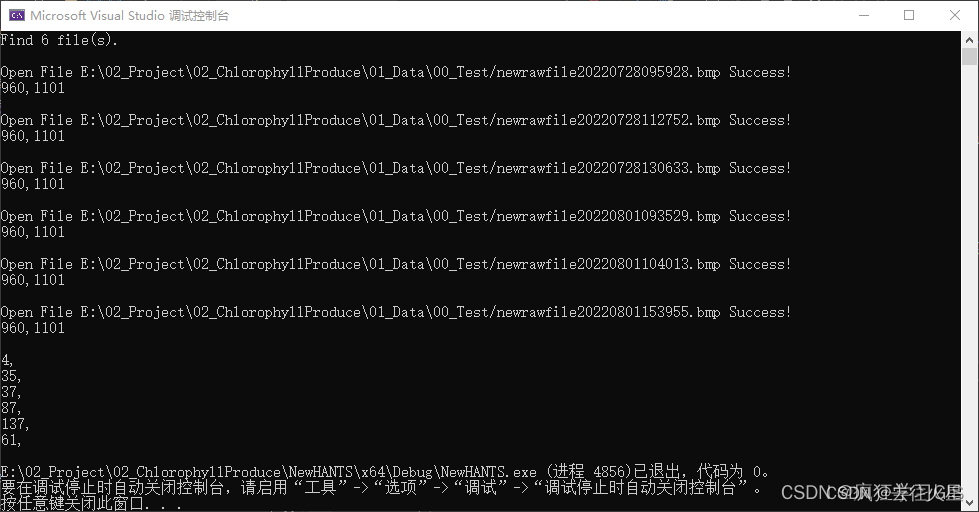
其中,会显示栅格遥感影像文件的筛选情况、具体文件名称及其各自的行号与列号;同时,最后一部分则是本文1.5部分提及的测试输出结果,其表示本文所用的6景遥感影像各自(0,0)位置处的像元数值。
至此,大功告成。
参考链接: https://www.cnblogs.com/fkxxgis/p/18004549
相关文章:
C++ GDAL提取多时相遥感影像中像素随时间变化的数值数组
本文介绍基于C语言GDAL库,批量读取大量栅格遥感影像文件,并生成各像元数值的时间序列数组的方法。 首先,我们来明确一下本文所需实现的需求。现在有一个文件夹,其中包含了很多不同格式的文件,如下图所示。 其中&#x…...

免费-华为od-C卷-javascript-动态规划-贪心歌手.js
动态规划-贪心歌手 还有很多其他题,链接是github, 进去可以查看对应文件夹就行...
elementui 实现一个固定位置的Pagination(分页)组件
系列文章目录 一、elementui 导航菜单栏和Breadcrumb 面包屑关联 二、elementui 左侧导航菜单栏与main区域联动 三、elementui 中设置图片的高度并支持PC和手机自适应 四、 elementui 实现一个固定位置的Pagination(分页)组件 文章目录 系列文章目录…...

紧急备考全攻略,如何短期通过PMP考试?
今年身边有很多同事朋友都要考PMP,而我属于这些人里”第一个吃螃蟹“的人,一次拿下5A,下面分享一下我自己备考PMP的经验。 我是根据自己的学习计划复习的,不能说这些方法适合所有人,但对备考的伙伴们来说,…...

python开发poc,fofa爬虫批量化扫洞
学习使用python做到批量化的漏洞脚本 1.通过fofa搜索结果来采集脚本 2.批量化扫描漏洞 ---glassfish存在任意文件读取在默认48484端口,漏洞验证的poc为: "glassfish" && port"4848" && country"CN" http://loca…...
适用于 Windows 10 的 10 大免费数据恢复软件
数据丢失可能是一场噩梦,尤其是在涉及重要文件和文档时。无论是由于意外删除、系统崩溃还是病毒攻击,找到适合 Windows 10 的文件夹恢复软件都可以在恢复丢失的数据方面发挥重要作用。在本指南中,我们将探索适用于 Windows 10 用户的 10 大免…...
zabbix企业级监控平台
zabbix部署 安装源 重新创建纯净环境,利用base克隆一台虚拟机server1 给server1做快照,方便下次实验恢复使用 进入zabbix官网https://www.zabbix.com rpm -Uvh https://repo.zabbix.com/zabbix/5.0/rhel/7/x86_64/zabbix-release-5.0-1.el7.noarch.rpm …...

如何关闭WordPress的自动更新功能
Wordpress为什么自动更新 WordPress自动更新是为了提供更好的安全性和稳定性。 安全性:WordPress是一个广泛使用的内容管理系统,因此成为恶意攻击的目标。WordPress的自动更新功能确保你的网站及时获得最新的安全补丁和修复程序,以保护你的网…...

【分析 GClog 的吞吐量和停顿时间、heapdump 内存泄漏分析】
文章目录 🔊博主介绍🥤本文内容GClog分析以优化吞吐量和停顿时间步骤1: 收集GClog步骤2: 分析GClog步骤3: 优化建议步骤4: 实施优化 Heapdump内存泄漏分析步骤1: 获取Heapdump步骤2: 分析Heapdump步骤3: 定位泄漏对象步骤4: 分析泄漏原因步骤5: 修复泄漏…...

[STL-list]介绍、与vector的对比、模拟实现的迭代器问题
一、list使用介绍 list的底层是带头双向链表结构,双向链表中每个元素存储在互不相关的独立节点中,在节点中通过指针指向其前一个元素和后一个元素。与其他的序列式容器相比(array,vector,deque),list通常在任意位置进行…...

代码随想录-035期-算法训练营【博客笔记汇总表】
ヾ(◍∇◍)ノ゙加油~ 目录 00、说明 01、刷题网址 02、每日打卡任务 03、博客打卡笔记 01、数组 02、链表 03、哈希表 04、字符串 05、双指针法 06、栈与队列 07、二叉树 08、回溯算法 09、贪心算法 10、动态规划 11、单调栈 12、图论 04…...
postgresql数据库|数据整合的好工具--Oracle-fdw的部署和使用
概述 Oracle_fdw 是一种postgresql外部表插件,可以读取到Oracle上面的数据。是一种非常方便且常见的pg与Oracle的同步数据的方法 Oracle_fdw 适用场景: Oracle_fdw 是一个开源的 Foreign Data Wrapper (FDW),主要用于在 PostgreSQL 数据库中…...

让php开发更优雅-Laravel篇
前言 随着开发经验的增加,也伴随团队开发的积累,规范开发显得越来越重要,本文给大家提供一些laravel开发的进阶思路和经验,让大家开发更加统一规范,代码看起来更加优雅。 1.更多使用第三方库。团队开发的时候…...
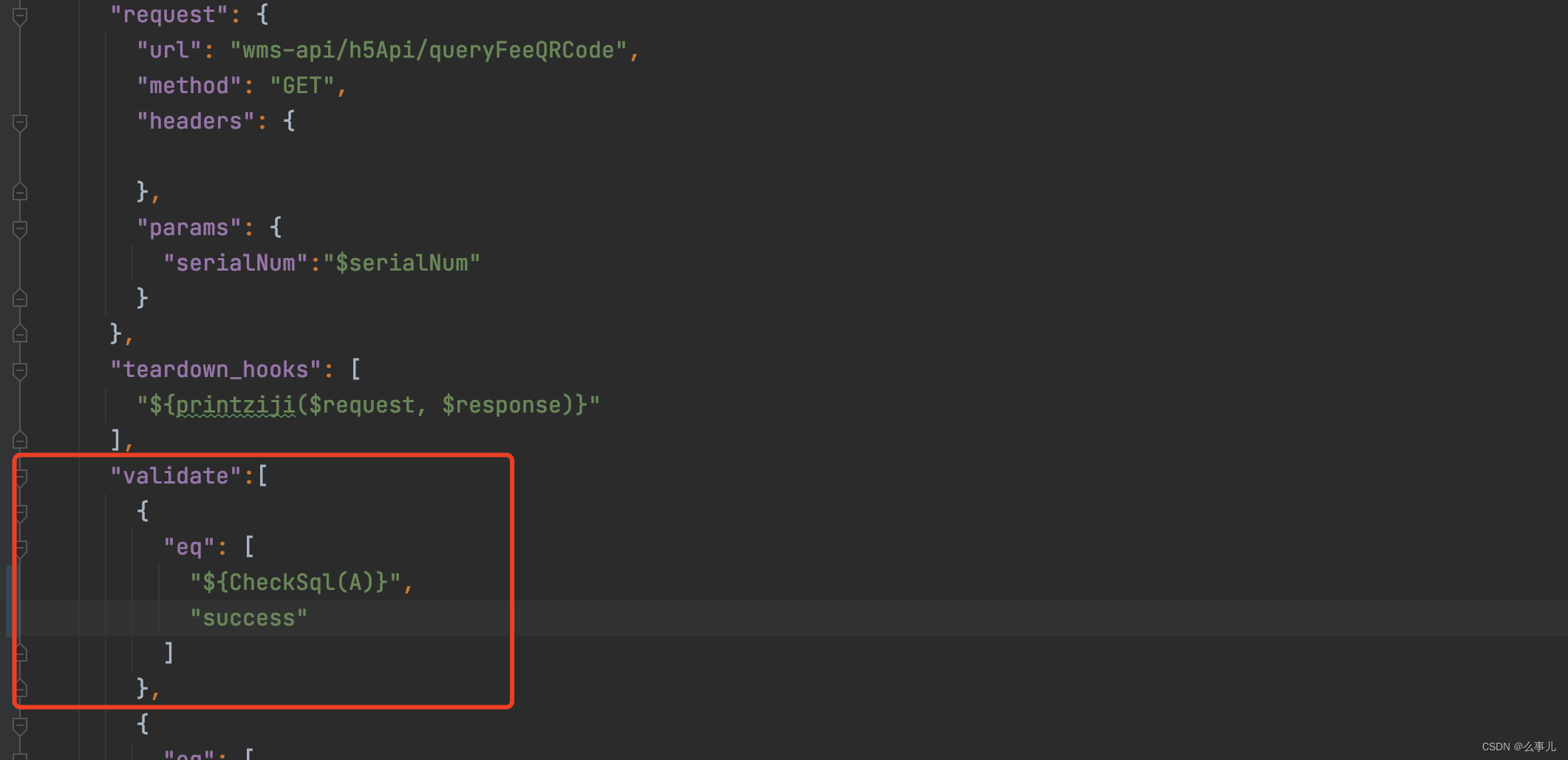
自动化测试之httprunner框架hook函数实操
本篇介绍httprunner中hook函数的使用,以及通过编程能力实现建设自动化测试更全面的场景覆盖 前置: 互联网时代让我们更快的学习到什么是Httprunner 正文: 经过上文了解到这个框架怎么使用之后,我们开始来探讨一下我们为什么要用…...
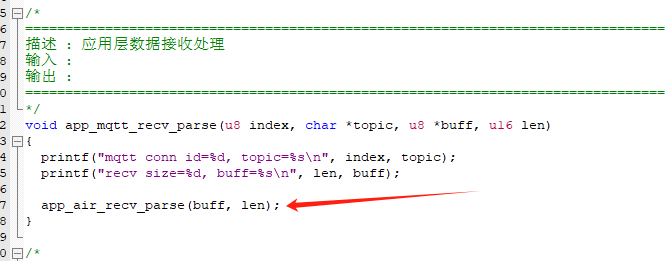
物联网实战--入门篇之(七)嵌入式-MQTT
目录 一、MQTT简介 二、MQTT使用方法 三、MQTT驱动设计 四、代码解析 五、使用过程 六、总结 一、MQTT简介 MQTT因为其轻量、高效和稳定的特点,特别适合作为物联网系统的数据传输协议,已经成为物联网事实上的通信标准了。关于协议的具体内容看看这…...
)
跑模型——labelme的json文件转成yolo使用的txt文件(语义分割)
前言 将labelme多边形标注的json文件转换成yolo使用的txt文件 import os import json import numpy as np from tqdm import tqdm#实现函数 def json2txt(path_json, path_txt): # 可修改生成格式with open(path_json, r) as path_json:jsonx json.load(path_json)with open…...
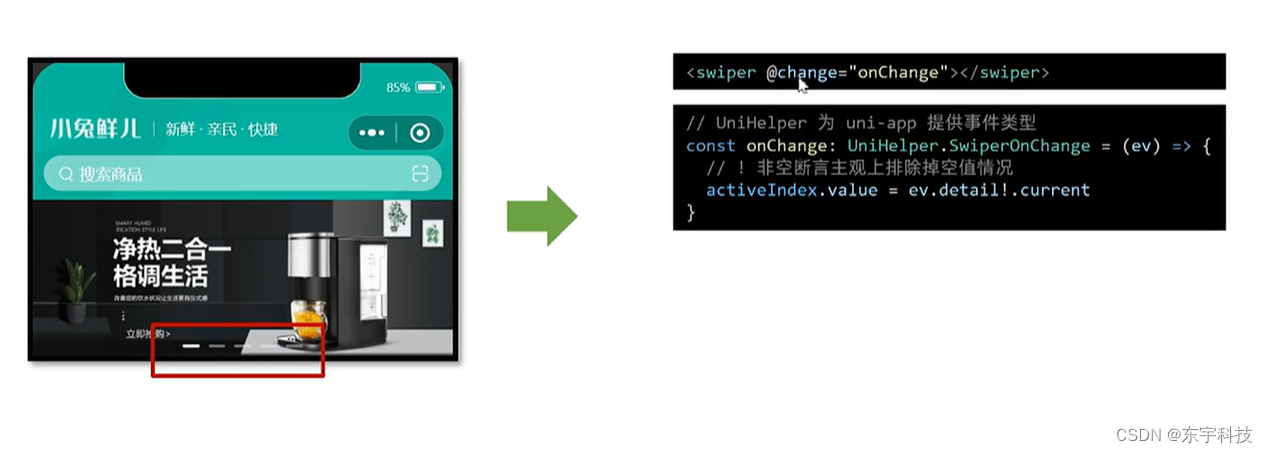
一个项目仿京东商场代码
git clone http://git.itcast.cn/heimaqianduan/erabbit-uni-app-vue3-ts.git...

计算机网络——WEB服务器编程实验
实验目的 1. 处理一个 http 请求 2. 接收并解析 http 请求 3. 从服务器文件系统中获得被请求的文件 4. 创建一个包括被请求的文件的 http 响应信息 5. 直接发送该信息到客户端 具体内容 一、C 程序来实现 web 服务器功能。 二、用 HTML 语言编写两个 HTML文件,并…...

蓝桥杯算法题:最大比例
题目描述: X星球的某个大奖赛设了 M 级奖励。 每个级别的奖金是一个正整数。 并且,相邻的两个级别间的比例是个固定值。 也就是说:所有级别的奖金数构成了一个等比数列。 比如:16,24,36,54,其等比值为:3/2。…...
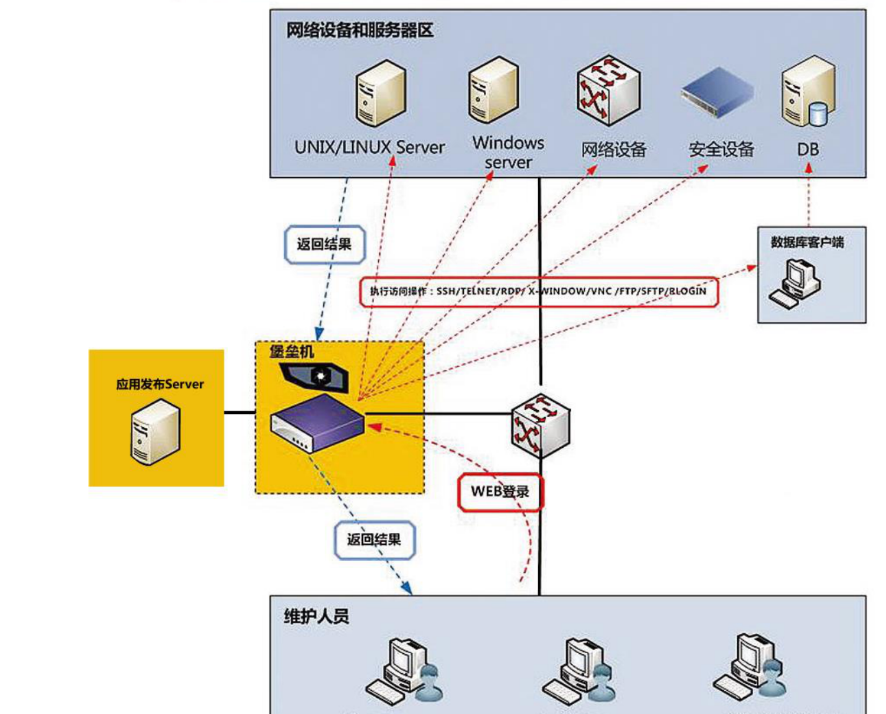
【堡垒机】堡垒机的介绍
目前,常用的堡垒机有收费和开源两类。 收费的有行云管家、纽盾堡垒机; 开源的有jumpserver; 这几种各有各的优缺点,如何选择,大家可以根据实际场景来判断 什么是堡垒机 堡垒机,即在一个特定的网络环境下&…...

终极解决Windows风扇控制难题:FanControl完全指南
终极解决Windows风扇控制难题:FanControl完全指南 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/fa/Fan…...

QtScrcpy终极指南:如何免费实现高清Android投屏与多设备控制
QtScrcpy终极指南:如何免费实现高清Android投屏与多设备控制 【免费下载链接】QtScrcpy Android实时投屏软件,此应用程序提供USB(或通过TCP/IP)连接的Android设备的显示和控制。它不需要任何root访问权限 项目地址: https://gitcode.com/barry-ran/QtS…...

深度解析DS4Windows:让PS4手柄在Windows平台重获新生
深度解析DS4Windows:让PS4手柄在Windows平台重获新生 【免费下载链接】DS4Windows Like those other ds4tools, but sexier 项目地址: https://gitcode.com/gh_mirrors/ds/DS4Windows 你是否曾经为PS4手柄在PC上的兼容性问题而烦恼?游戏无法识别、…...

体验Taotoken官方价折扣与Token Plan带来的成本优势
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 体验Taotoken官方价折扣与Token Plan带来的成本优势 1. 引言:从按需付费到计划性支出 对于频繁调用大模型API的开发者…...

英雄联盟国服换肤工具R3nzSkin完整使用指南:免费体验所有皮肤
英雄联盟国服换肤工具R3nzSkin完整使用指南:免费体验所有皮肤 【免费下载链接】R3nzSkin-For-China-Server Skin changer for League of Legends (LOL) 项目地址: https://gitcode.com/gh_mirrors/r3/R3nzSkin-For-China-Server 想要在英雄联盟国服中免费体验…...

closure-compiler-js迁移指南:如何从弃用版本平稳过渡到官方版本
closure-compiler-js迁移指南:如何从弃用版本平稳过渡到官方版本 【免费下载链接】closure-compiler-js Package for the JS version of closure-compiler for use via NPM 项目地址: https://gitcode.com/gh_mirrors/cl/closure-compiler-js 如果你正在使用…...
全攻略)
手把手教你配置Jitsi Meet的.env文件:从安全密码生成到Nginx反代(含SSL证书)全攻略
Jitsi Meet生产级部署实战:安全配置与Nginx反代全解析 当内部测试的Jitsi Meet需要面向公网提供服务时,.env文件的精细配置与Nginx反向代理的深度整合就成为关键分水岭。许多团队在过渡阶段常遇到视频卡顿、安全漏洞或证书配置错误等问题,本…...

避坑指南:为什么你的PyTorch 1.8 + CUDA 10.1跑不了Grad-CAM?深入torch.fx模块依赖
避坑指南:为什么你的PyTorch 1.8 CUDA 10.1跑不了Grad-CAM?深入torch.fx模块依赖 当你兴致勃勃地准备用Grad-CAM可视化模型注意力时,终端突然抛出ModuleNotFoundError: No module named torch.fx——这个看似简单的报错背后,其实…...

告别手动写测试报告:用AI自动生成可视化测试总结
测试报告的价值困境与破局在软件交付的最后关头,测试报告往往陷入一种尴尬的境地。一方面是倒计时的上线压力,另一方面是堆积如山的测试数据。许多测试工程师都有过这样的经历:打开Excel,机械地复制用例执行数、通过率、缺陷数&am…...

如何智能批量添加EXIF水印:摄影师的自动化参数标注解决方案
如何智能批量添加EXIF水印:摄影师的自动化参数标注解决方案 【免费下载链接】semi-utils 一个批量添加相机机型和拍摄参数的工具,后续「可能」添加其他功能。 项目地址: https://gitcode.com/gh_mirrors/se/semi-utils 摄影爱好者和专业摄影师都面…...