计算机视觉 | 基于二值图像数字矩阵的距离变换算法
Hi,大家好,我是半亩花海。本实验基于 OpenCV 实现了二值图像数字矩阵的距离变换算法。首先生成一个 480x480 的黑色背景图像(定义黑色为0,白色为1),在其中随机选择了三个白色像素点作为距离变换的原点,利用 OpenCV 中 distanceTransform 等相关函数计算并输出这些原点到其他像素点的欧氏距离、D4 距离和 D8 距离及其相应的距离矩阵,并将距离变换结果可视化。
文章目录
- 一、导入必要库
- 二、初始化输入图像和变换结果图像
- 三、根据二值图计算并输出距离矩阵
- 四、将距离矩阵转换为可视化图片
一、导入必要库
导入必要的库(cv2、numpy、matplotlib.pyplot),为后续的图像处理任务做准备。
#!/usr/bin/env python
# coding: utf-8
import cv2
import numpy as np
import matplotlib.pyplot as plt# 用来设置字体样式(黑体)以正常显示中文标签
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
二、初始化输入图像和变换结果图像
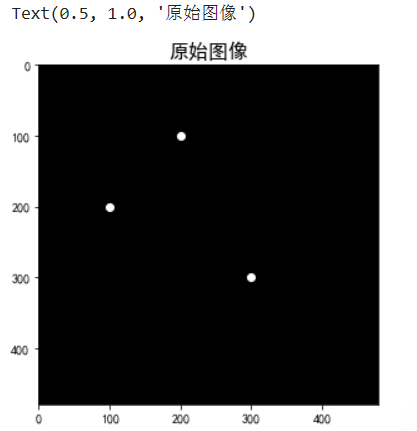
自定义 480x480 二值图,随机生成图案,初始值都是 0(黑色),并显示原始图像。
-
图像数字化:
通过传感器获得的图像是平面坐标 ( x , y ) (x,y) (x,y) 的连续函数 f ( x , y ) f(x,y) f(x,y),它的值图像对应位置的亮度。为了能够让计算机来处理,需要对图像进行采样,并且对亮度值进行量化。-
采样: 对连续函数 f ( x , y ) f(x,y) f(x,y) 进行采样,就是分别对 x x x 轴和 y y y 轴,按照固定间隔取值,得到平面坐标上的 M × N M×N M×N 个点,将其函数值作为元素生成 M M M 行 N N N 列的矩阵。
-
量化亮度值。 将 f ( x , y ) f(x,y) f(x,y) 的值转化为等价的整数值的过程称为量化,量化的级别越高,图像越细致。通常将亮度值表示为 0~255 之间的整数。
-
# 创建一个大小为 480x480 的全黑图像(确保数据类型为 8 位无符号整数)
mat = np.zeros((480, 480), dtype=np.uint8)
# 给输入图像指定三个像素点设置为白色像素,作为距离变换原点(区域块)
mat[100, 200] = 1
mat[200, 100] = 1
mat[300, 300] = 1# 显示原始图像和距离变换结果
plt.figure(figsize=(15, 5))
plt.scatter([100, 200, 300], [200, 100, 300], color='white', marker='o') # 添加三个白点表示出三个像素点的坐标
plt.imshow(mat, cmap='gray')
plt.title('原始图像', fontsize=16)
# 将输入图像中 1(白色)和 0(黑色)调换,使得原点距离为 0
mat = 1 - mat
三、根据二值图计算并输出距离矩阵
- 距离: 距离是描述图像两点像素之间的远近关系的度量,常见的度量距离有欧式距离(Euchildean distance)、城市街区距离(City block distance)、棋盘距离(Chessboard distance)。以下以两坐标点 a = ( i , j ) a = (i, j) a=(i,j) 和 b = ( k , l ) b = (k, l) b=(k,l) 的距离为例,来说明各种距离的定义方式。
(1)欧式距离 D e D_e De: 欧式距离的定义源于经典的几何学,与我们数学中所学的简单几何的两点之间的距离一致,为两个像素点坐标值的平方根。欧式距离的优点在于其定义非常地直观,是显而易见的,但缺点在于平方根的计算是非常耗时的。
D e ( a , b ) = ( ( i − k ) 2 ) + ( j − l ) 2 D_e(a, b)=\sqrt{\left((i-k)^2\right)+(j-l)^2} De(a,b)=((i−k)2)+(j−l)2
(2)城市街区距离 D 4 D_4 D4: 距离描述的是只允许像素坐标系平面中横向和纵向的移动距离,4表示在这种定义下,像素点是 4 邻接的,即每个点只与它的上、下、左、右相邻的 4 个点之间的距离为 1。
D 4 ( a , b ) = ∣ i − k ∣ + ∣ j − l ∣ D_4(a, b)=|i-k|+|j-l| D4(a,b)=∣i−k∣+∣j−l∣
(3)棋盘距离 D 8 D_8 D8: 如果允许在图像坐标系中像素点的对角线方向的移动,就可以得到棋盘距离,8 表示在这种定义下,像素点是 8 邻接的,即每个点只与它的上、下、左、右、四个对角线方向相邻的 8 个点之间的距离为 1。
D 8 ( a , b ) = max { ∣ i − k ∣ , ∣ j − l ∣ } D_8(a, b)=\max \{|i-k|,|j-l|\} D8(a,b)=max{∣i−k∣,∣j−l∣}
- 距离变换
距离变换也叫作距离函数或者斜切算法。它是距离概念的一个应用,图像处理的一些算法以距离变换为基础。距离变换描述的是图像中像素点与某个区域块的距离,区域块中的像素点值为 0,临近区域块的像素点有较小的值,离它越远值越大。
以二值图像为例,其中区域块内部的像素值为 1,其他像素值为 0。距离变换给出每个像素点到最近的区域块边界的距离,区域块内部的距离变换结果为0。输入图像如图 1 所示, D 4 D_4 D4 距离的距离变换结果如图 2 所示。

下面来讨论距离变换算法,其核心是利用两个小的局部掩膜遍历图像。第一遍利用掩模1,左上角开始,从左往右,从上往下。第二遍利用第二个掩模,右下角开始,从右往左,从下往上。掩模形状如下图所示:
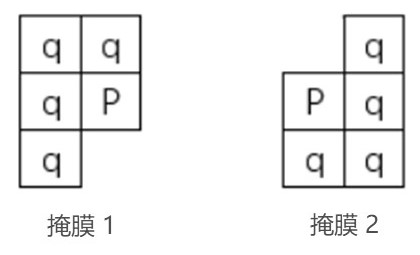
按照某种距离(如: D 4 D_4 D4 距离或 D 8 D_8 D8 距离)对大小为 M × N M×N M×N 的图像中的区域块作距离变换,算法过程如下:
(1) 建立一个大小为 M × N M×N M×N 的数组 F F F,作如下的初始化:将区域块中的元素设置为 0,其余元素设置为无穷;
(2) 利用掩模1(mask1),左上角开始,从左往右,从上往下遍历数组,将掩模中P点对应的元素的值作如下更新:
F ( P ) = min q ∈ mask1 { F ( P ) , D ( P , q ) + F ( q ) } F(P)=\min _{q \in \operatorname{mask1}}\{F(P), D(P, q)+F(q)\} F(P)=q∈mask1min{F(P),D(P,q)+F(q)}
(3) 利用掩模2(mask2),右下角开始,从右往左,从下往上遍历数组,将掩模中P点对应的元素的值作如下更新:
F ( P ) = min q ∈ mask2 { F ( P ) , D ( P , q ) + F ( q ) } F(P)=\min _{q \in \operatorname{mask2}}\{F(P), D(P, q)+F(q)\} F(P)=q∈mask2min{F(P),D(P,q)+F(q)}
最终得到的更新后的数组即为距离变换的结果。
这个算法过程在图像的边界处需要做出调整,因为在边界处,掩模不能全部覆盖图像,这时可以将掩模中没有对应元素的位置的值当作 0 来处理,即maskSize=0。
在 OpenCV 中,distanceTransform 函数是用于计算二进制图像中每个非零像素到最近零像素的距离的函数。这个函数通常用于图像处理中的形态学操作和特征提取。下面是 distanceTransform 函数的一般形式:
dist_transform = cv2.distanceTransform(src, distanceType, maskSize)
-
src: 是输入的二进制图像(该图像应该是一个 8 位单通道图像)。
-
distanceType: 是指定距离度量的类型。
-
maskSize: 是指定计算距离时使用的卷积核的大小。
# 分别利用欧式距离、D4 距离和 D8 距离作距离变换
transMatE = cv2.distanceTransform(mat, distanceType=cv2.DIST_L2, maskSize=0) # 计算欧氏距离变换
transMatD4 = cv2.distanceTransform(mat, distanceType=cv2.DIST_L1, maskSize=0) # 计算 D4 距离变换
transMatD8 = cv2.distanceTransform(mat, distanceType=cv2.DIST_C, maskSize=0) # 计算 D8 距离变换
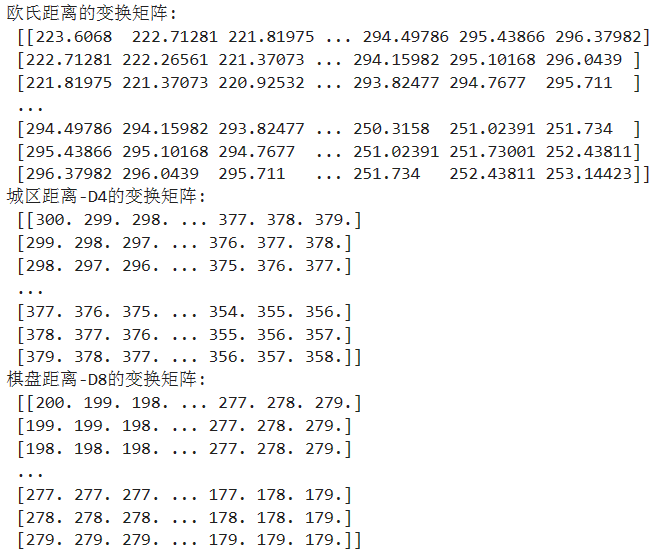
# 输出欧式、D4 和 D8 的距离矩阵
print("欧氏距离的变换矩阵:\n", transMatE)
print("城区距离-D4的变换矩阵:\n", transMatD4)
print("棋盘距离-D8的变换矩阵:\n", transMatD8)
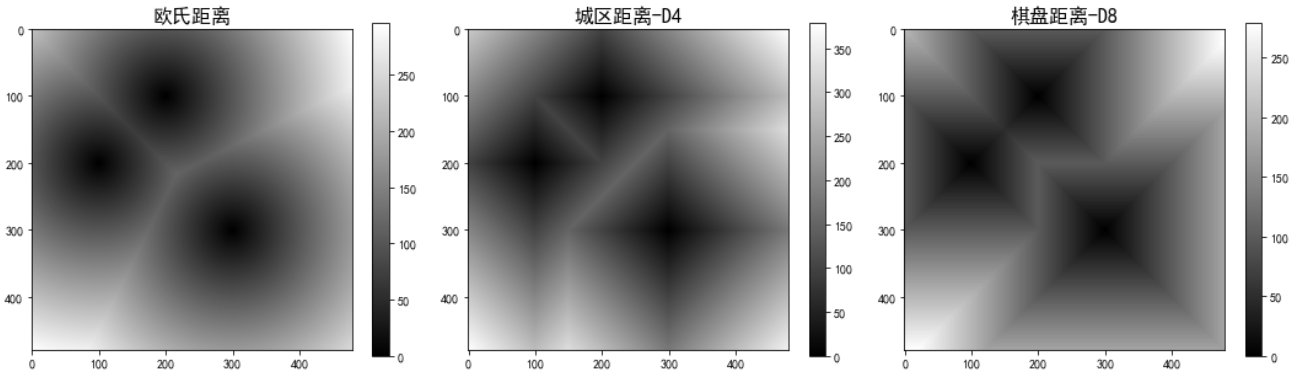
四、将距离矩阵转换为可视化图片
因为经过距离矩阵变换之后,变换结果的数据类型为 float32(32 位浮点数),而在 OpenCV 中,采用 imshow 函数显示图像时需要使用 uint8 数据类型(8 位无符号整数),使得像素值的范围是从 0~255,可以表示灰度图像中的所有可能像素值。而 Matplotlib 可以直接处理 float32 类型的图像数据,因此并不需要将图像数据类型转换为 uint8 类型。
plt.figure(figsize=(15, 5))plt.subplot(1, 3, 1)
plt.imshow(transMatE, cmap='gray')
plt.title('欧氏距离', fontsize=16)
plt.colorbar(shrink=0.8)plt.subplot(1, 3, 2)
plt.imshow(transMatD4, cmap='gray')
plt.title('城区距离-D4', fontsize=16)
plt.colorbar(shrink=0.8)plt.subplot(1, 3, 3)
plt.imshow(transMatD8, cmap='gray')
plt.title('棋盘距离-D8', fontsize=16)
plt.colorbar(shrink=0.8)plt.tight_layout()
plt.show()
相关文章:
计算机视觉 | 基于二值图像数字矩阵的距离变换算法
Hi,大家好,我是半亩花海。本实验基于 OpenCV 实现了二值图像数字矩阵的距离变换算法。首先生成一个 480x480 的黑色背景图像(定义黑色为0,白色为1),在其中随机选择了三个白色像素点作为距离变换的原点&…...

Arcgis windows webadaptor配置
注意windows下安装细节 1、电脑必须添加限定域名及dns后缀。 准备工作 a、安装webadaptor,获取jar文件 b、tomcat中部署两个jar,名字不相同,一个用server配置,一个用于portal配置 c、geoserver用来配置server d、geoscene用来配置…...

对接阿里云实时语音转文字的思路
将上述概念转化为详细代码需要一定的步骤。这里,我们将根据之前讨论的服务划分,创建一个简化的框架来模拟这个流程。注意,由于空间限制和简化目的,某些实现细节会被省略或简化,你可能需要根据实际情况进行调整。 1. 配…...
如何转行成为产品经理?
转行NPDP也是很合适的一条发展路径,之后从事新产品开发相关工作~ 一、什么是NPDP? NPDP 是产品经理国际资格认证,美国产品开发与管理协会(PDMA)发起的,是目前国际公认的唯一的新产品开发专业认证ÿ…...

SpringCloudAlibaba-整合nacos(二)
目录地址: SpringCloudAlibaba整合-CSDN博客 一、nacos服务部分 1.下载nacos,并执行数据库脚本:nacos-mysql.sql 2.修改配置文件,配置mysql 3.启动nacos ./startup.sh -m standalone 4.访问:http://127.0.0.1:884…...
STM32H7通用定时器计数功能的使用
目录 概述 1 STM32定时器介绍 1.1 认识通用定时器 1.2 通用定时器的特征 1.3 递增计数模式 1.4 时钟选择 2 STM32Cube配置定时器时钟 2.1 配置定时器参数 2.2 配置定时器时钟 3 STM32H7定时器使用 3.1 认识定时器的数据结构 3.2 计数功能实现 4 测试案例 4.1 代码…...

信息系统项目管理师0044:IT治理方法与标准(3信息系统治理—3.1 IT治理—3.1.4 IT治理方法与标准)
点击查看专栏目录 文章目录 3.1.4 IT治理方法与标准1. ITSS中1T服务治理 3.1.4 IT治理方法与标准 考虑到IT治理对组织战略目标达成的重要性,国内外各类机构持续研究并沉淀IT治理相关的最佳实践方法、定义相关标准,这里面比较典型的是我国信息技术服务标准…...

探索Linux:在VMware虚拟机上安装Linux操作系统
探索Linux:在VMware虚拟机上安装Linux操作系统 在计算机领域,Linux操作系统以其稳定性、安全性和自由开源的特点备受青睐。通过在VMware虚拟机上安装Linux,您可以轻松体验Linux操作系统的强大功能。本文将详细介绍在VMware虚拟机上安装Linux…...

JavaScript进阶6之函数式编程与ES6ESNext规范
函数式编程 柯里化currycurrycompose示例:简化版展开写: debug示例一:示例二: 模板字符串css in js方案 箭头函数问题 生成器 generator应用场景 反射 Reflect 柯里化curry compose是curry的应用 在 lodash/fp underscore ramba …...

AcWing 1381. 阶乘
解题思路 最后一位数相乘的变化。注意:为什么不是ss%10,如果12 * 15, 12的最后一位时2, * 1530,则为3,问题是12*15180,为8,两 者不符,说明ss%10中的10要多加0. import j…...
Leetcode 394. 字符串解码
心路历程: 这道题看到括号直接想到栈,五分钟新题直接秒了,一开始以为需要两个栈分别存储数字和非数字,后来发现一个栈就够了,思路如图: 这道题考察的应该是队栈这两种数据结构的转换,因为每次…...

LeetCode - 1702. 修改后的最大二进制字符串
文章目录 解析AC CODE 题目链接:LeetCode - 1702. 修改后的最大二进制字符串 解析 详细题解:贪心,简洁写法(Python/Java/C/Go/JS/Rust) 思路很牛b。 简单来说我们需要想办法将0配对,将其变为10࿰…...
虹科Pico汽车示波器 | 免拆诊断案例 | 2011款东风悦达起亚K5车发动机偶尔起动困难
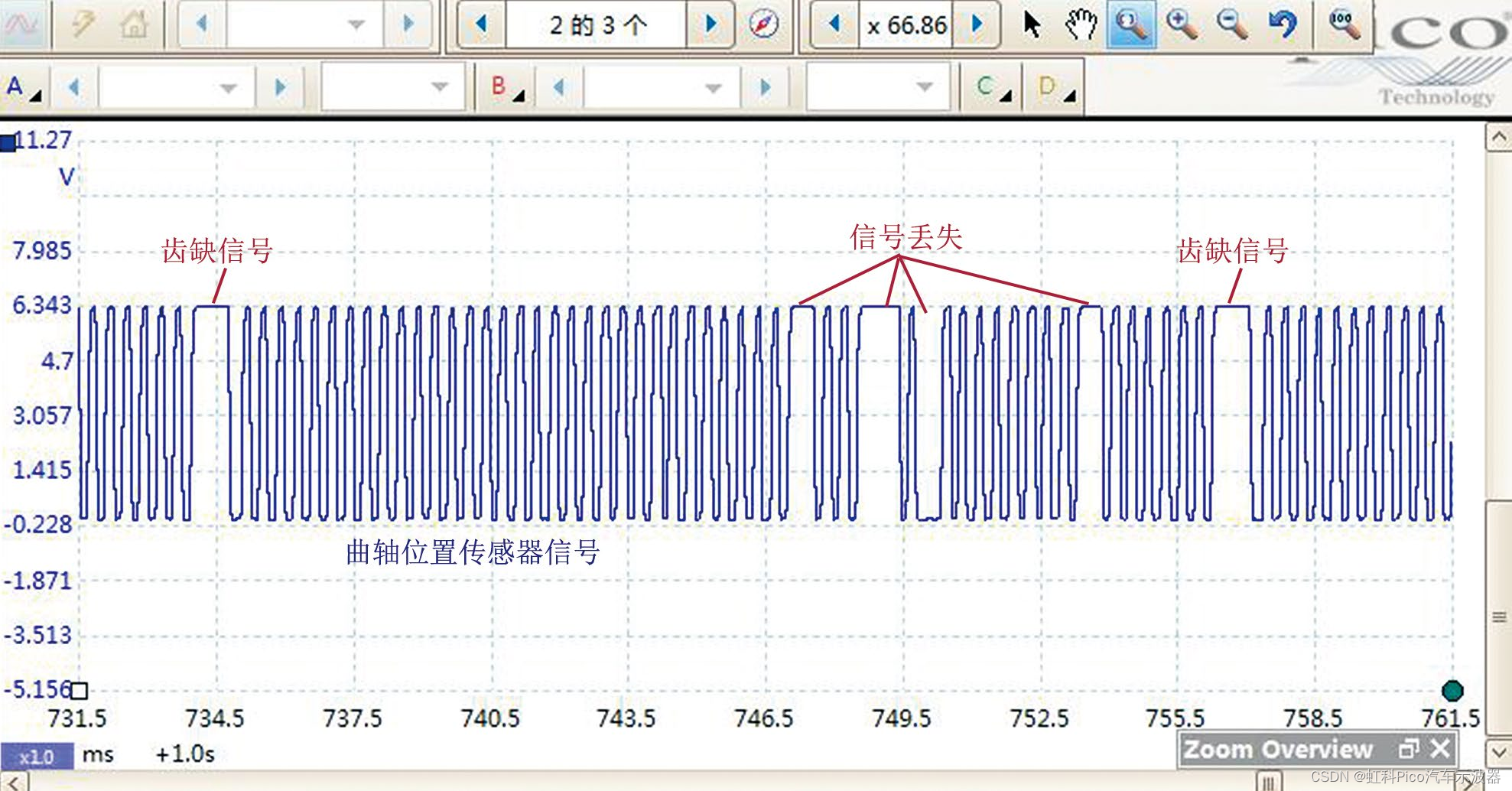
一、故障现象 一辆2011款东风悦达起亚K5车,搭载G4KD发动机,累计行驶里程约为24.5万km。车主反映,第1次起动发动机时偶尔无法起动着机,第2次能够正常起动着机,但发动机故障灯异常点亮。为此在其他维修厂维修过…...

Docker- Redis
博文目录 文章目录 说明前置命令 说明 Docker Hub Redis 数据卷数据卷印射在容器内的路径redis/data 容器内的路径说明/data数据目录/data/redis.conf配置文件 前置 在 GitHub 找一份 redis.conf 配置文件, 放到卷 redis 中, 按需修改 # bind 127.0.0.1 # 解除只允许环回地…...

Python 基于 OpenCV 视觉图像处理实战 之 OpenCV 简单视频处理实战案例 之八 简单视频素描效果
Python 基于 OpenCV 视觉图像处理实战 之 OpenCV 简单视频处理实战案例 之八 简单视频素描效果 目录 Python 基于 OpenCV 视觉图像处理实战 之 OpenCV 简单视频处理实战案例 之八 简单视频素描效果 一、简单介绍 二、简单指定视频某片段快放效果实现原理 三、简单指定视频某…...
数据结构——线性表(链式存储结构)
语言:C语言软件:Visual Studio 2022笔记书籍:数据结构——用C语言描述如有错误,感谢指正。若有侵权请联系博主 一、线性表的逻辑结构 线性表是n个类型相同的数据元素的有限序列,对n>0,除第一元素无直接…...

面试算法-169-二叉树的中序遍历
题目 给定一个二叉树的根节点 root ,返回 它的 中序 遍历 。 示例 1: 输入:root [1,null,2,3] 输出:[1,3,2] 解 class Solution {public List<Integer> inorderTraversal(TreeNode root) {List<Integer> resul…...

计算机视觉——引导APSF和梯度自适应卷积增强夜间雾霾图像的可见性算法与模型部署(C++/python)
摘要 在夜间雾霾场景中,可见性经常受到低光照、强烈光晕、光散射以及多色光源等多种因素的影响而降低。现有的夜间除雾方法常常难以处理光晕或低光照条件,导致视觉效果过暗或光晕效应无法被有效抑制。本文通过抑制光晕和增强低光区域来提升单张夜间雾霾…...
git bash用法-批量修改文件名
在win系统上安装git bash可以使用命令行模式操作,比较方便 1.原始文件名 2.代码 for file in *3utr*; do mv "$file" "$(echo "$file" | sed s/3utr/5utr/)"; done3.修改后的文件名...
分布式社交媒体:探索Web3对社交媒体的改变
在数字化时代,社交媒体已成为人们日常生活中不可或缺的一部分。然而,传统的社交媒体平台往往由中心化的机构或公司掌控,用户的数据和内容受到限制,引发了一系列的隐私和安全问题。随着区块链技术的发展,分布式社交媒体…...
)
别只当稳压器用!用LM7805做个简易功放,驱动小喇叭实测(附电路图)
从稳压到扩音:用LM7805打造微型功放的创意实践 1. 重新认识LM7805:不只是稳压芯片 LM7805在电子爱好者心中一直是"稳压神器"的代名词,但鲜少有人意识到这颗经典三端稳压器隐藏的音频放大潜力。当我们撕掉它身上"5V稳压专用&qu…...

Nix-on-Droid测试与部署最佳实践:确保您的移动环境稳定可靠
Nix-on-Droid测试与部署最佳实践:确保您的移动环境稳定可靠 【免费下载链接】nix-on-droid Nix-enabled environment for your Android device. [maintainerst184256,Gerschtli] 项目地址: https://gitcode.com/gh_mirrors/ni/nix-on-droid 想要在Android设…...

Dot自定义配置指南:调整模型参数满足个性化需求
Dot自定义配置指南:调整模型参数满足个性化需求 【免费下载链接】Dot Text-To-Speech, RAG, and LLMs. All local! 项目地址: https://gitcode.com/gh_mirrors/dot1/Dot Dot是一款功能强大的本地AI应用,支持文本转语音、RAG(检索增强生…...

给STM32加个‘U盘’:手把手教你用W25Q64 Flash芯片实现掉电不丢失的数据存储
给STM32加个‘U盘’:手把手教你用W25Q64 Flash芯片实现掉电不丢失的数据存储 在嵌入式系统开发中,数据存储一直是个让人头疼的问题。想象一下,你花了一周时间调试的传感器参数,因为一次意外断电全部丢失;或者精心收集的…...

CircuitPython内存优化:冻结模块原理与嵌入式开发实践
1. 项目概述:当微控制器项目撞上内存墙在嵌入式开发的世界里,尤其是玩转像Adafruit Circuit Playground Express这类资源受限的微控制器时,我们常常会与一个无形的“天花板”迎头相撞——内存限制。你可能正兴致勃勃地为你的智能徽章或互动艺…...

DHCP 实验总结:类比“停车场取卡机”模式
企业导师换一个生活里更常见的场景:停车场入口的自动取卡机。你听完会发现,DHCP 就是网络世界的“自动取卡机”。一、生活比喻(停车场取卡全过程)想象你开车进入一个大型停车场:到达入口,按下取卡按钮&…...

全志T113-S3 SPI屏幕驱动踩坑实录:内核5.4下适配ILI9341的完整流程与代码修改
全志T113-S3 SPI屏幕驱动深度解析:内核5.4适配ILI9341的实战指南 在嵌入式开发领域,显示设备的驱动适配一直是工程师面临的核心挑战之一。全志T113-S3作为一款性价比突出的处理器,广泛应用于各类嵌入式场景,而ILI9341驱动的SPI屏幕…...

扔掉KVM切换器!GitHub 25.7K Star的Deskflow:用一套键鼠无缝控制多台电脑的软件KVM方案
两台电脑两套键鼠,桌面杂乱、切换繁琐,硬件KVM切换器又贵得离谱?Deskflow 是一款开源跨平台的软件KVM方案,它允许用一套键鼠无缝穿梭于不同设备之间,让一台电脑的鼠标光标直接“穿越”到另一台电脑的屏幕上。本文将从技…...

网盘下载新革命:一劳永逸的直链解析方案
网盘下载新革命:一劳永逸的直链解析方案 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘 / 迅雷云…...

Claude与Figma智能协作:基于MCP协议的设计自动化实践
1. 项目概述:当Claude遇上Figma,设计协作的智能革命如果你是一名产品设计师或前端工程师,大概率经历过这样的场景:在Figma里反复调整一个组件的间距,只为找到那个“感觉对了”的数值;或者为了统一整个项目的…...