Harmony鸿蒙南向驱动开发-UART接口使用
功能简介
UART指异步收发传输器(Universal Asynchronous Receiver/Transmitter),是通用串行数据总线,用于异步通信。该总线双向通信,可以实现全双工传输。
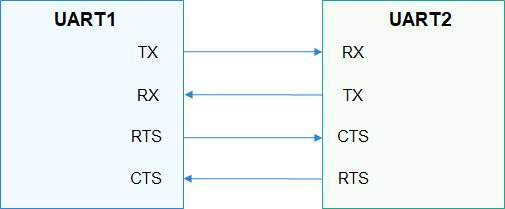
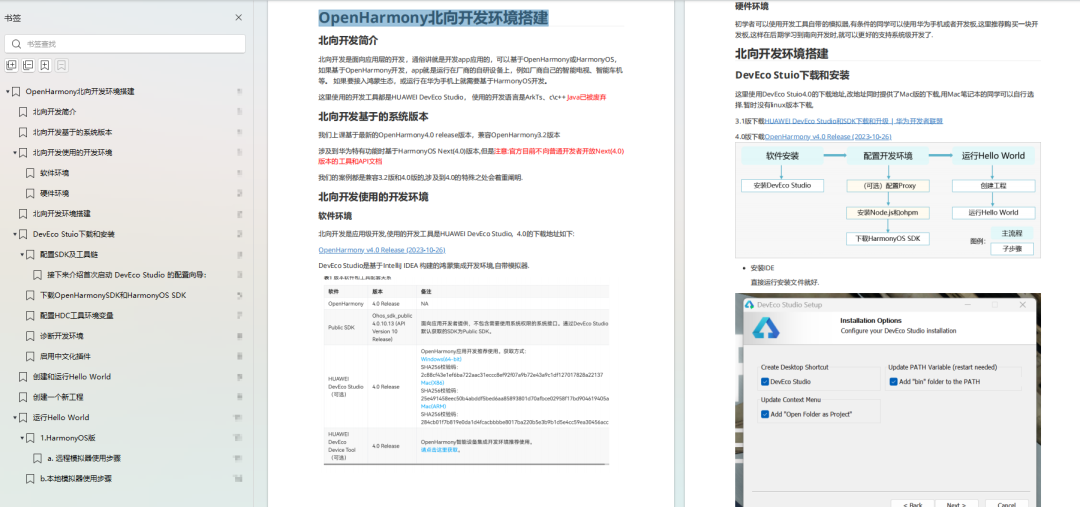
两个UART设备的连接示意图如下,UART与其他模块一般用2线(图1)或4线(图2)相连,它们分别是:
-
TX:发送数据端,和对端的RX相连。
-
RX:接收数据端,和对端的TX相连。
-
RTS:发送请求信号,用于指示本设备是否准备好,可接受数据,和对端CTS相连。
-
CTS:允许发送信号,用于判断是否可以向对端发送数据,和对端RTS相连。
图 1 2线UART设备连接示意图
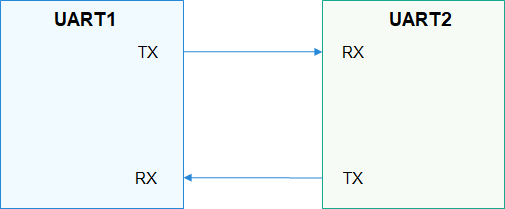
图 2 4线UART设备连接示意图
UART通信之前,收发双方需要约定好一些参数:波特率、数据格式(起始位、数据位、校验位、停止位)等。通信过程中,UART通过TX发送给对端数据,通过RX接收对端发送的数据。当UART接收缓存达到预定的门限值时,RTS变为不可发送数据,对端的CTS检测到不可发送数据,则停止发送数据。
UART接口定义了操作UART端口的通用方法集合,包括:
-
打开/关闭UART设备
-
读写数据
-
设置/获取UART设备波特率
-
设置/获取UART设备属性
基本概念
-
异步通信
异步通信中,数据通常以字符或者字节为单位组成字符帧传送。字符帧由发送端逐帧发送,通过传输线被接收设备逐帧接收。发送端和接收端可以由各自的时钟来控制数据的发送和接收,这两个时钟源彼此独立,互不同步。异步通信以一个字符为传输单位,通信中两个字符间的时间间隔是不固定的,然而在同一个字符中的两个相邻位代码间的时间间隔是固定的。
-
全双工传输(Full Duplex)
此通信模式允许数据在两个方向上同时传输,它在能力上相当于两个单工通信方式的结合。全双工可以同时进行信号的双向传输。
运作机制
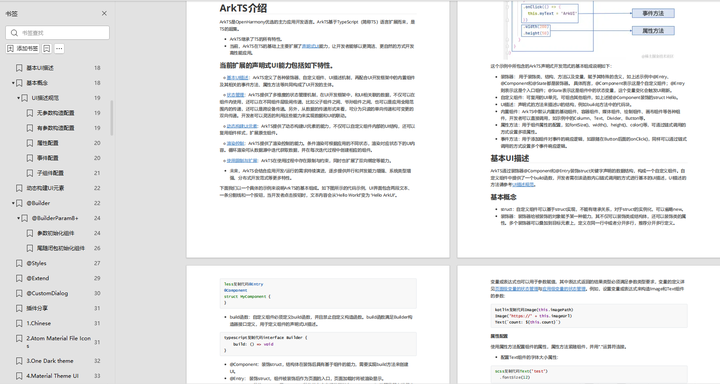
在HDF框架中,UART接口适配模式采用独立服务模式(如图3所示)。在这种模式下,每一个设备对象会独立发布一个设备服务来处理外部访问,设备管理器收到API的访问请求之后,通过提取该请求的参数,达到调用实际设备对象的相应内部方法的目的。独立服务模式可以直接借助HDF设备管理器的服务管理能力,但需要为每个设备单独配置设备节点,增加内存占用。
独立服务模式下,核心层不会统一发布一个服务供上层使用,因此这种模式下驱动要为每个控制器发布一个服务,具体表现为:
-
驱动适配者需要实现HdfDriverEntry的Bind钩子函数以绑定服务。
-
device_info.hcs文件中deviceNode的policy字段为1或2,不能为0。
UART模块各分层作用:
-
接口层提供打开UART设备、UART设备读取指定长度数据、UART设备写入指定长度数据、设置UART设备波特率、获取设UART设备波特率、设置UART设备属性、获取UART设备波特率、设置UART设备传输模式、关闭UART设备的接口。
-
核心层主要提供UART控制器的创建、移除以及管理的能力,通过钩子函数与适配层交互。
-
适配层主要是将钩子函数的功能实例化,实现具体的功能。
图 3 UART独立服务模式结构图

约束与限制
UART模块UartSetTransMode接口设置传输模式在Linux中不支持,仅为空实现。
使用指导
场景介绍
UART模块应用比较广泛,主要用于实现设备之间的低速串行通信,例如输出打印信息,当然也可以外接各种模块,如GPS、蓝牙等。
接口说明
UART模块提供的主要接口如表1所示,具体API详见//drivers/hdf_core/framework/include/platform/uart_if.h。
表 1 UART驱动API接口功能介绍
| 接口名 | 接口描述 |
|---|---|
| DevHandle UartOpen(uint32_t port) | UART获取设备句柄 |
| void UartClose(DevHandle handle) | UART释放设备句柄 |
| int32_t UartRead(DevHandle handle, uint8_t *data, uint32_t size) | 从UART设备中读取指定长度的数据 |
| int32_t UartWrite(DevHandle handle, uint8_t *data, uint32_t size) | 向UART设备中写入指定长度的数据 |
| int32_t UartGetBaud(DevHandle handle, uint32_t *baudRate) | UART获取波特率 |
| int32_t UartSetBaud(DevHandle handle, uint32_t baudRate) | UART设置波特率 |
| int32_t UartGetAttribute(DevHandle handle, struct UartAttribute *attribute) | UART获取设备属性 |
| int32_t UartSetAttribute(DevHandle handle, struct UartAttribute *attribute) | UART设置设备属性 |
| int32_t UartSetTransMode(DevHandle handle, enum UartTransMode mode) | UART设置传输模式 |
说明:
本文涉及的UART所有接口,支持内核态及用户态使用。
开发步骤
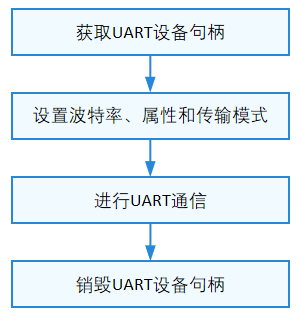
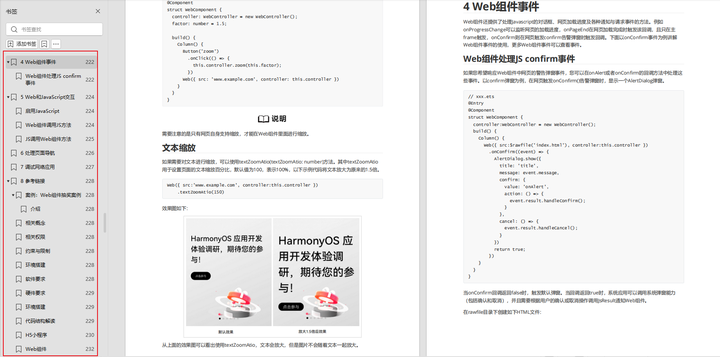
使用UART的一般流程如下图所示。
图 4 UART使用流程图
获取UART设备句柄
在使用UART进行通信时,首先要调用UartOpen获取UART设备句柄,该函数会返回指定端口号的UART设备句柄。
DevHandle UartOpen(uint32_t port);表 2 UartOpen参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| port | uint32_t类型,UART设备号 |
| 返回值 | 返回值描述 |
| NULL | 获取UART设备句柄失败 |
| 设备句柄 | UART设备句柄 |
假设系统中的UART端口号为1,获取该UART设备句柄的示例如下:
DevHandle handle = NULL; // UART设备句柄
uint32_t port = 1; // UART设备端口号handle = UartOpen(port);
if (handle == NULL) {HDF_LOGE("UartOpen: open uart_%u failed!\n", port);return;
}UART设置波特率
在通信之前,需要设置UART的波特率,设置波特率的函数如下所示:
int32_t UartSetBaud(DevHandle handle, uint32_t baudRate);表 3 UartSetBaud参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,UART设备句柄 |
| baudRate | uint32_t类型,待设置的波特率值 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | UART设置波特率成功 |
| 负数 | UART设置波特率失败 |
假设需要设置的UART波特率为9600,设置波特率的实例如下:
int32_t ret;ret = UartSetBaud(handle, 9600); // 设置UART波特率
if (ret != HDF_SUCCESS) {HDF_LOGE("UartSetBaud: failed, ret %d\n", ret);return ret;
}UART获取波特率
设置UART的波特率后,可以通过获取波特率接口来查看UART当前的波特率,获取波特率的函数如下所示:
int32_t UartGetBaud(DevHandle handle, uint32_t *baudRate);表 4 UartGetBaud参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,UART设备句柄 |
| baudRate | uint32_t类型指针,用于接收波特率的值 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | UART获取波特率成功 |
| 负数 | UART获取波特率失败 |
获取波特率的实例如下:
int32_t ret;
uint32_t baudRate;ret = UartGetBaud(handle, &baudRate); // 获取UART波特率
if (ret != HDF_SUCCESS) {HDF_LOGE("UartGetBaud: failed, ret %d\n", ret);return ret;
}UART设置设备属性
在通信之前,需要设置UART的设备属性,设置设备属性的函数如下所示:
int32_t UartSetAttribute(DevHandle handle, struct UartAttribute *attribute);表 5 UartSetAttribute参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,UART设备句柄 |
| attribute | 结构体指针,待设置的设备属性 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | UART设置设备属性成功 |
| 负数 | UART设置设备属性失败 |
设置UART的设备属性的实例如下:
int32_t ret;
struct UartAttribute attribute;attribute.dataBits = UART_ATTR_DATABIT_7; // UART传输数据位宽,一次传输7个bit
attribute.parity = UART_ATTR_PARITY_NONE; // UART传输数据无校检
attribute.stopBits = UART_ATTR_STOPBIT_1; // UART传输数据停止位为1位
attribute.rts = UART_ATTR_RTS_DIS; // UART禁用RTS
attribute.cts = UART_ATTR_CTS_DIS; // UART禁用CTS
attribute.fifoRxEn = UART_ATTR_RX_FIFO_EN; // UART使能RX FIFO
attribute.fifoTxEn = UART_ATTR_TX_FIFO_EN; // UART使能TX FIFOret = UartSetAttribute(handle, &attribute); // 设置UART设备属性
if (ret != HDF_SUCCESS) {HDF_LOGE("UartSetAttribute: failed, ret %d\n", ret);
turn ret;
}UART获取设备属性
设置UART的设备属性后,可以通过获取设备属性接口来查看UART当前的设备属性,获取设备属性的函数如下所示:
int32_t UartGetAttribute(DevHandle handle, struct UartAttribute *attribute);表 6 UartGetAttribute参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,UART设备句柄 |
| attribute | 结构体指针,接收UART设备属性的指针 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | UART获取设备属性成功 |
| 负数 | UART获取设备属性失败 |
获取UART的设备属性的实例如下:
int32_t ret;
struct UartAttribute attribute;ret = UartGetAttribute(handle, &attribute); // 获取UART设备属性
if (ret != HDF_SUCCESS) {HDF_LOGE("UartGetAttribute: failed, ret %d\n", ret);return ret;
}设置UART传输模式
在通信之前,需要设置UART的传输模式,设置传输模式的函数如下所示:
int32_t UartSetTransMode(DevHandle handle, enum UartTransMode mode);表 7 UartSetTransMode参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,UART设备句柄 |
| mode | 枚举类型,待设置的传输模式 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | UART设置传输模式成功 |
| 负数 | UART设置传输模式失败 |
假设需要设置的UART传输模式为UART_MODE_RD_BLOCK,设置传输模式的实例如下:
int32_t ret;ret = UartSetTransMode(handle, UART_MODE_RD_BLOCK); // 设置UART传输模式
if (ret != HDF_SUCCESS) {HDF_LOGE("UartSetTransMode: failed, ret %d\n", ret);return ret;
}向UART设备写入指定长度的数据
对应的接口函数如下所示:
int32_t UartWrite(DevHandle handle, uint8_t *data, uint32_t size);表 8 UartWrite参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,UART设备句柄 |
| data | uint8_t类型指针,待写入数据的 |
| size | uint32_t类型,待写入数据的长度 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | UART写数据成功 |
| 负数 | UART写数据失败 |
写入指定长度数据的实例如下:
int32_t ret;
uint8_t wbuff[5] = {1, 2, 3, 4, 5};ret = UartWrite(handle, wbuff, 5); // 向UART设备写入指定长度的数据
if (ret != HDF_SUCCESS) {HDF_LOGE("UartWrite: failed, ret %d\n", ret);return ret;
}从UART设备中读取指定长度的数据
对应的接口函数如下所示:
int32_t UartRead(DevHandle handle, uint8_t *data, uint32_t size);表 9 UartRead参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,UART设备句柄 |
| data | uint8_t类型指针,接收读取数据 |
| size | uint32_t类型,待读取数据的长度 |
| 返回值 | 返回值描述 |
| 非负数 | UART读取到的数据长度 |
| 负数 | UART读取数据失败 |
读取指定长度数据的实例如下:
int32_t ret;
uint8_t rbuff[5] = {0};ret = UartRead(handle, rbuff, 5); // 从UART设备读取指定长度的数据
if (ret < 0) {HDF_LOGE("UartRead: failed, ret %d\n", ret);return ret;
}注意: UART返回值为非负值,表示UART读取成功。若返回值等于0,表示UART无有效数据可以读取。若返回值大于0,表示实际读取到的数据长度,该长度小于或等于传入的参数size的大小,并且不超过当前正在使用的UART控制器规定的最大单次读取数据长度的值。
销毁UART设备句柄
UART通信完成之后,需要销毁UART设备句柄,函数如下所示:
void UartClose(DevHandle handle);该函数会释放申请的资源。
表 10 UartClose参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | UART设备句柄 |
销毁UART设备句柄的实例如下:
UartClose(handle); // 销毁UART设备句柄使用实例
下面将基于Hi3516DV300开发板展示使用UART完整操作,步骤主要如下:
-
传入UART端口号num,打开端口号对应的UART设备并获得UART设备句柄。
-
通过UART设备句柄及设置的波特率,设置UART设备的波特率。
-
通过UART设备句柄及待获取的波特率,获取UART设备的波特率。
-
通过UART设备句柄及待设置的设备属性,设置UART设备的设备属性。
-
通过UART设备句柄及待获取的设备属性,获取UART设备的设备属性。
-
通过UART设备句柄及待设置的传输模式,设置UART设备的传输模式。
-
通过UART设备句柄及待传输的数据及大小,传输指定长度的数据。
-
通过UART设备句柄及待接收的数据及大小,接收指定长度的数据。
-
通过UART设备句柄,关闭UART设备。
#include "hdf_log.h"
#include "uart_if.h"static int32_t UartTestSample(void)
{int32_t ret;uint32_t port;uint32_t baud;DevHandle handle = NULL;uint8_t wbuff[5] = { 1, 2, 3, 4, 5 };uint8_t rbuff[5] = { 0 };struct UartAttribute attribute;attribute.dataBits = UART_ATTR_DATABIT_7; // UART传输数据位宽,一次传输7个bitattribute.parity = UART_ATTR_PARITY_NONE; // UART传输数据无校检attribute.stopBits = UART_ATTR_STOPBIT_1; // UART传输数据停止位为1位attribute.rts = UART_ATTR_RTS_DIS; // UART禁用RTSattribute.cts = UART_ATTR_CTS_DIS; // UART禁用CTSattribute.fifoRxEn = UART_ATTR_RX_FIFO_EN; // UART使能RX FIFOattribute.fifoTxEn = UART_ATTR_TX_FIFO_EN; // UART使能TX FIFOport = 1; // UART设备端口号,要填写实际平台上的端口号handle = UartOpen(port); // 获取UART设备句柄if (handle == NULL) {HDF_LOGE("UartOpen: open uart_%u failed!\n", port);return HDF_FAILURE;}ret = UartSetBaud(handle, 9600); // 设置UART波特率为9600if (ret != HDF_SUCCESS) {HDF_LOGE("UartSetBaud: set baud failed, ret %d\n", ret);goto ERR;}ret = UartGetBaud(handle, &baud); // 获取UART波特率if (ret != HDF_SUCCESS) {HDF_LOGE("UartGetBaud: get baud failed, ret %d\n", ret);goto ERR;}ret = UartSetAttribute(handle, &attribute); // 设置UART设备属性if (ret != HDF_SUCCESS) {HDF_LOGE("UartSetAttribute: set attribute failed, ret %d\n", ret);goto ERR;}ret = UartGetAttribute(handle, &attribute); // 获取UART设备属性if (ret != HDF_SUCCESS) {HDF_LOGE("UartGetAttribute: get attribute failed, ret %d\n", ret);goto ERR;}ret = UartSetTransMode(handle, UART_MODE_RD_NONBLOCK); // 设置UART传输模式为非阻塞模式if (ret != HDF_SUCCESS) {HDF_LOGE("UartSetTransMode: set trans mode failed, ret %d\n", ret);goto ERR;}ret = UartWrite(handle, wbuff, 5); // 向UART设备写入5字节的数据if (ret != HDF_SUCCESS) {HDF_LOGE("UartWrite: write data failed, ret %d\n", ret);goto ERR;}ret = UartRead(handle, rbuff, 5); // 从UART设备读取5字节的数据if (ret < 0) {HDF_LOGE("UartRead: read data failed, ret %d\n", ret);goto ERR;}HDF_LOGI("%s: function tests end, %d", __func__, ret);
ERR:UartClose(handle); // 销毁UART设备句柄return ret;
}最后
有很多小伙伴不知道学习哪些鸿蒙开发技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?而且学习时频繁踩坑,最终浪费大量时间。所以有一份实用的鸿蒙(HarmonyOS NEXT)资料用来跟着学习是非常有必要的。
这份鸿蒙(HarmonyOS NEXT)资料包含了鸿蒙开发必掌握的核心知识要点,内容包含了(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、音频、视频、WebGL、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、Harmony南向开发、鸿蒙项目实战等等)鸿蒙(HarmonyOS NEXT)技术知识点。
希望这一份鸿蒙学习资料能够给大家带来帮助,有需要的小伙伴自行领取,限时开源,先到先得~无套路领取!!
获取这份完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
鸿蒙(HarmonyOS NEXT)最新学习路线
-
HarmonOS基础技能
- HarmonOS就业必备技能
- HarmonOS多媒体技术
- 鸿蒙NaPi组件进阶
- HarmonOS高级技能

- 初识HarmonOS内核
- 实战就业级设备开发
有了路线图,怎么能没有学习资料呢,小编也准备了一份联合鸿蒙官方发布笔记整理收纳的一套系统性的鸿蒙(OpenHarmony )学习手册(共计1236页)与鸿蒙(OpenHarmony )开发入门教学视频,内容包含:ArkTS、ArkUI、Web开发、应用模型、资源分类…等知识点。
获取以上完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
《鸿蒙 (OpenHarmony)开发入门教学视频》
《鸿蒙生态应用开发V2.0白皮书》
《鸿蒙 (OpenHarmony)开发基础到实战手册》
OpenHarmony北向、南向开发环境搭建
《鸿蒙开发基础》
- ArkTS语言
- 安装DevEco Studio
- 运用你的第一个ArkTS应用
- ArkUI声明式UI开发
- .……
《鸿蒙开发进阶》
- Stage模型入门
- 网络管理
- 数据管理
- 电话服务
- 分布式应用开发
- 通知与窗口管理
- 多媒体技术
- 安全技能
- 任务管理
- WebGL
- 国际化开发
- 应用测试
- DFX面向未来设计
- 鸿蒙系统移植和裁剪定制
- ……
《鸿蒙进阶实战》
- ArkTS实践
- UIAbility应用
- 网络案例
- ……
获取以上完整鸿蒙HarmonyOS学习资料,请点击→纯血版全套鸿蒙HarmonyOS学习资料
总结
总的来说,华为鸿蒙不再兼容安卓,对中年程序员来说是一个挑战,也是一个机会。只有积极应对变化,不断学习和提升自己,他们才能在这个变革的时代中立于不败之地。

相关文章:
Harmony鸿蒙南向驱动开发-UART接口使用
功能简介 UART指异步收发传输器(Universal Asynchronous Receiver/Transmitter),是通用串行数据总线,用于异步通信。该总线双向通信,可以实现全双工传输。 两个UART设备的连接示意图如下,UART与其他模块一…...

【示例】MySQL-事务控制示例:账户转账-savepoint关键字
前言 本文讲述MySQL中的事务,以账户转账为例,体会事务的概念,并讲解事务相关的一个关键字用法:savepoint 示例 数据准备 drop table if exists account;create table account(id int primary key AUTO_INCREMENT comment ID,n…...

STM32使用标准版RT-Thread,移植bsp中的板文件后,想使用I/O设备模型,使用串口3或者串口4收发时,发现串口3或者串口4没反应
STM32移植RT-Thread出现的问题及解决办法 问题原因解决方法 问题 使用标准版RT-Thread,移植bsp中的板文件后,想使用I/O设备模型,使用串口3或者串口4收发时,发现串口3或者串口4没反应。出现问题:程序一直跑在 while (__HAL_UART_…...
MVCC(解决MySql中的并发事务的隔离性)
MVCC 如何保证事务的隔离性? 1.排他锁:如一个事务获取了一个数据行的排他锁,其他事务就不能再获取改行的其他锁。 2.MVCC:多版本并发控制。 MVCC: 1.隐藏字段 1.DB_TRX_ID:最近修改事务的id。默认值从0开…...

第四十八章 为 Web 应用程序实现 HTTP 身份验证 - 在处理请求之前在 CSP 中进行身份验证
文章目录 第四十八章 为 Web 应用程序实现 HTTP 身份验证 - 在处理请求之前在 CSP 中进行身份验证在处理请求之前在 CSP 中进行身份验证。 第四十八章 为 Web 应用程序实现 HTTP 身份验证 - 在处理请求之前在 CSP 中进行身份验证 在处理请求之前在 CSP 中进行身份验证。 这是…...
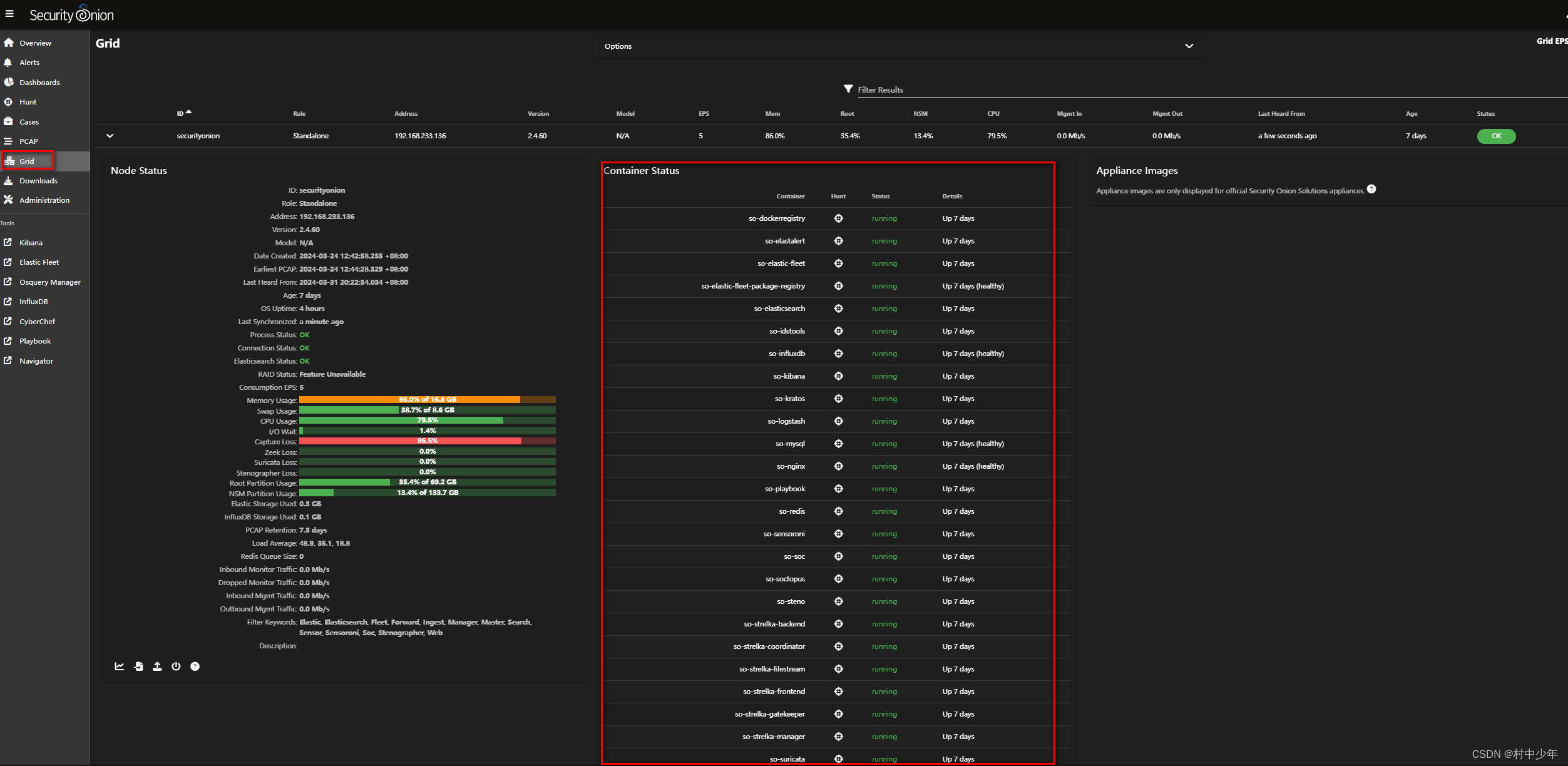
家庭网络防御系统搭建-siem之security onion 安装配置过程详解
本文介绍一下security onion的安装流程,将使用该工具集中管理终端EDR和网络NDR sensor产生的日志。 充当SIEM的平台有很多,比如可以直接使用原生的elastic以及splunk等,security onion的优势在于该平台能够方便的集成网络侧(比如…...
【MATLAB源码-第23期】基于matlab的短时傅里叶STFT信号变换仿真,得到信号的时频曲线图。
1、算法描述 短时傅里叶变换(Short-Time Fourier Transform,STFT)是傅里叶变换的一种扩展,用于分析信号在时域和频域上的变化。描述如下: 1. **时域与频域分析**: - 信号通常以时域的形式表示…...

链表中倒数最后k个结点【c语言】
#include <stdio.h> #include <stdlib.h>typedef struct Node {int data;struct Node* next; } Node, *LinkedList;// 创建一个新节点 Node* createNode(int data) {Node* newNode (Node*)malloc(sizeof(Node));if (newNode NULL) {printf("Error! Unable t…...
在一台恢复测试机器上验证oracle备份有效性
一 目的 定期将生产环境oracle数据库恢复到一台测试环境数据库服务器上,以验证备份是否有效,是否能正常恢复。 二 环境 这里以恢复orcl1库为例,计划在orcl这个实例上进行恢复测试。 三 实验步骤 3.1 在目标端创建和源端一样的备份目录 ①…...
Harmony鸿蒙南向驱动开发-MIPI CSI
CSI(Camera Serial Interface)是由MIPI联盟下Camera工作组指定的接口标准。CSI-2是MIPI CSI第二版,主要由应用层、协议层、物理层组成,最大支持4通道数据传输、单线传输速度高达1Gb/s。 物理层支持HS(High Speed&…...
最优算法100例之43-包含min函数的栈
专栏主页:计算机专业基础知识总结(适用于期末复习考研刷题求职面试)系列文章https://blog.csdn.net/seeker1994/category_12585732.html 题目描述 题目描述: 定义栈的数据结构,请在该类型中实现一个能够得到栈的最小元素的min函数,在该栈中,调用min,push及pop的时间复杂…...
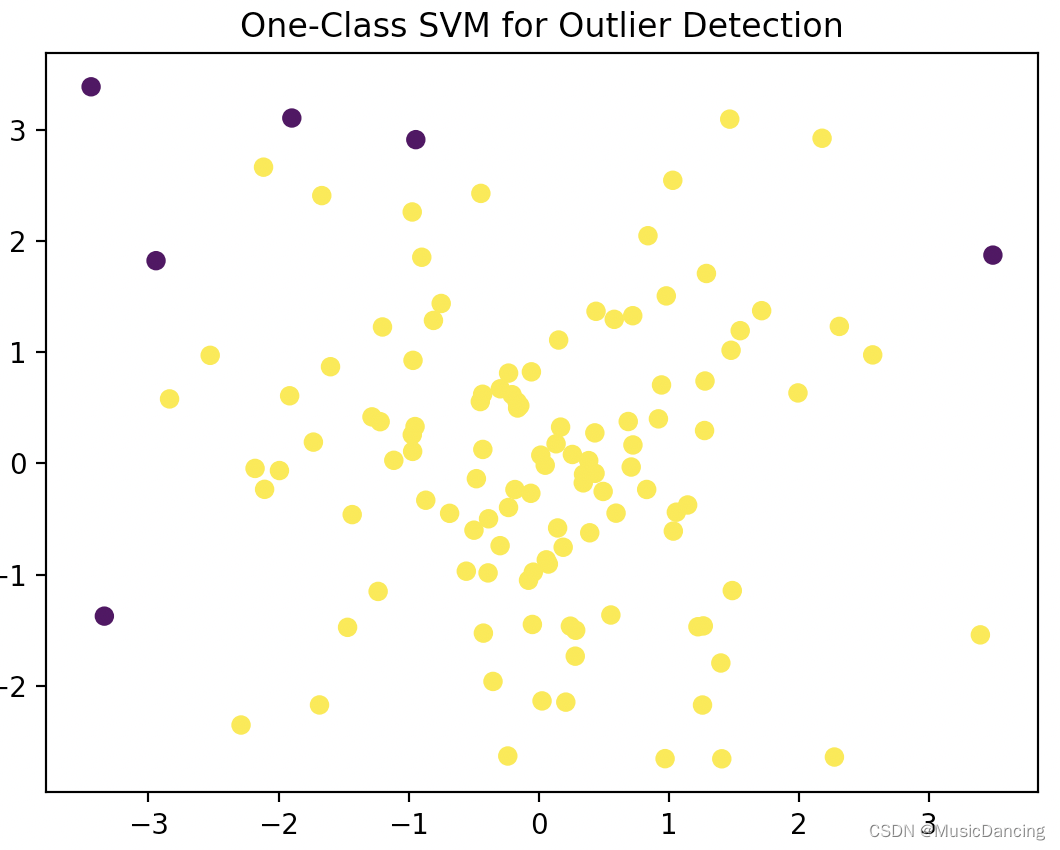
什么是One-Class SVM
1. 简介 单类支持向量机,简称One-Class SVM(One-Class Support Vector Machine),是一种用于异常检测的监督学习算法。其主要目标是找出数据集中的异常或罕见样本,而不需要大量的正常样本用于训练。这使其在处理高维数据和非常稀疏的异常检测问…...
【Ubuntu】远程连接乌班图的方式-命令行界面、图形界面
系统环境:ubuntu-22.04.2-amd64.iso 连接工具:MobaXterm、windows自带远程桌面mstsc.exe 重置root密码:Ubuntu默认root密码是随机的,需要使用命令sudo passwd 进行重置。 一、命令行界面-SSH连接 1.1 SSH服务安装 …...
Ubuntu无网络标识的解决方法
1.出现的情况的特点 2.解决办法 2.1 进入root并输入密码 sudo su 2.2 更新NetworkManager的配置 得先有gedit或者vim,两个随意一个,这里用的gedit,没有就先弄gedit,有的话直接下一步 apt-get install gedit 或者vim apt-get ins…...
基于springboot实现课程答疑管理系统项目【项目源码+论文说明】
基于springboot实现课程答疑管理系统演示 摘要 随着信息互联网信息的飞速发展,无纸化作业变成了一种趋势,针对这个问题开发一个专门适应师生交流形式的网站。本文介绍了课程答疑系统的开发全过程。通过分析企业对于课程答疑系统的需求,创建了…...
【JVM】面试题汇总
JVM1. 什么是JVM?2. 了解过字节码文件的组成吗?3. 什么是运行时数据区4. 哪些区域会出现内存溢出5. JVM在JDK6-8之间在内存区域上有什么不同 6. 类的生命周期 7. 什么是类加载器?类加载器有哪几种 8. 什么是双亲委派机制?有什么好…...

趣谈 Rust 的 Copy trait 和 Clone trait
一、Copy trait 的关键作用 Rust 程序中的变量可以分成两类:实现 Copy trait 的和没实现 Copy trait 的。这有啥区别?当然很重要! 实现 Copy trait 的变量: 不存在所有权问题,可以随意赋值给其他变量,可以随意当参数…...
02 - Git 之命令 +
1 Git相关概念 1.1 以下所谈三个区,文件并不只是简单地在三个区转移,而是以复制副本的方式转移 使用 Git 管理的项目,拥有三个区域,分别是 Working area工作区(亦称为 工作树Working Tree)、stage area …...
每日一练(力扣)
我的思路是暴力枚举: 情况1:相同,就让子串和原串同时后移继续比较 情况2:不相同,就只让原串后移 public int strStr(String haystack, String needle) {if (haystack.length() < needle.length()){return -1;}for (int i 0; i < h…...

JWT详解及实战教程
目录 1.什么是JWT 2.JWT能做什么 3.为什么是JWT 基于传统的Session认证 基于JWT认证 4.JWT的结构是什么? 5.使用JWT 6.封装工具类 7.整合springboot 1.什么是JWT JSON Web Token (JWT) is an open standard (RFC 7519) that defines a compact and self-contained way…...

负载均衡器类型与配置
硬件负载均衡器硬件负载均衡器通常由专用设备提供,例如F5 BIG-IP、Citrix ADC等。这些设备提供高性能和稳定性,适合大型企业和高流量场景。软件负载均衡器软件负载均衡器包括Nginx、LVS、HAProxy、Kong和SLB等。它们分为L7层和L4层负载均衡器。L7层负载均…...
)
云计算Linux——nginx httpd后端 配置 反向代理(十二)
一、反向代理核心原理与作用补充: 正向代理: VPN 反向代理: 访问网站(动态任务)1.什么是反向代理?反向代理是服务器端的代理。客户端访问反向代理服务器,由代理服务器将请求转发给后 端真实服务器…...
)
鸿蒙一气总论(六)
第六卷 本心人道心性人性一气真解卷首引天地立、万象生、文明兴、文字成, 天地大道在外,人心大道在内。天有天象,地有地理,物有物性, 人有人心,心有人性,神有灵机。全书十六字铁律: …...

如何高效解决Unity游戏插件框架BepInEx启动失败:完整指南与最佳实践
如何高效解决Unity游戏插件框架BepInEx启动失败:完整指南与最佳实践 【免费下载链接】BepInEx Unity / XNA game patcher and plugin framework 项目地址: https://gitcode.com/GitHub_Trending/be/BepInEx BepInEx作为Unity游戏最强大的插件框架之一&#x…...

Arm GIC虚拟中断控制器架构与寄存器详解
1. Arm GIC虚拟中断控制器架构概述 中断控制器是现代处理器架构中的关键组件,负责协调和管理来自各种外设的中断请求。在虚拟化环境中,传统的中断控制器面临新的挑战:如何高效处理来自多个虚拟机的中断请求,同时保持隔离性和性能。…...

目标检测算法——史上最全遥感数据集汇总附下载链接【速速收藏】
🚀🚀🚀 近期,小海带在空闲之余收集整理了一批遥感检测数据集供大家参考。 整理不易,小伙伴们记得一键三连喔!!!🎈 🖥️ 专注开源数据集分享与深度学习科研思路…...
)
别再死记硬背了!手把手带你用Vivado SDK调试ZYNQ FSBL源码(附常见启动失败排查)
深入实战:用Vivado SDK调试ZYNQ FSBL源码的完整指南 在嵌入式系统开发中,理解启动流程是掌握整个系统运行机制的关键。对于Xilinx ZYNQ平台而言,First Stage Boot Loader(FSBL)作为系统启动的第一环,其重要…...
)
故障诊断创新算法之【先验知识+协同学习】基于故障特征掩码引导和潜在特征拆分的自编码器机械故障诊断(PyTorch)
小样本条件下,纯数据驱动方法很容易陷入过拟合和特征盲目提取,所以提出一种物理引导的深度诊断范式:将轴承内圈、外圈、滚动体的故障特征频率先验显式编码为故障特征掩码,并引入Huber函数构建先验引导损失,迫使网络学习…...

ARM架构FPU识别与FPSID寄存器详解
1. ARM浮点系统识别基础在ARM架构中,浮点运算单元(FPU)的实现经历了从VFPv1到VFPv4的演进过程。FPSID寄存器作为浮点系统的"身份证",提供了识别FPU实现特性的标准方式。这个32位寄存器包含了多个关键字段,每个字段都承载着特定的识…...

ARMv8地址转换机制与TCR_EL2寄存器详解
1. ARMv8地址转换机制概述在ARMv8架构中,地址转换是连接虚拟地址空间和物理内存的核心机制。这种转换通过多级页表结构实现,允许操作系统和hypervisor灵活地管理内存资源。作为系统程序员,理解这个机制的工作原理对开发高效可靠的系统软件至关…...