给自己的机器人部件安装单目摄像头并实现gazebo仿真功能
手术执行器添加摄像头
- 手术执行器文件夹surgical_new内容展示
- 如何添加单目摄像头
- 下载现成的机器人环境文件
- 启动仿真环境
手术执行器文件夹surgical_new内容展示
进入src文件夹下选择进入vision_obliquity文件夹

选择launch
有两个可用gazebo中rviz展示的launch文件,robot.launch是添加有摄像头的手术执行器文件,robot_env.launch进一步添加有环境信息的手术执行器文件
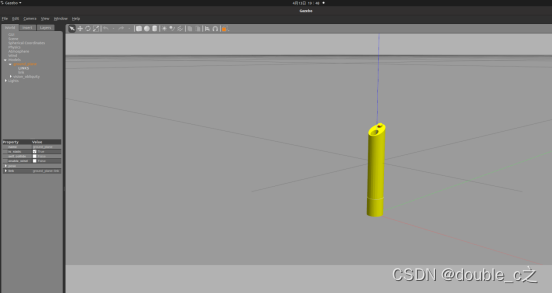
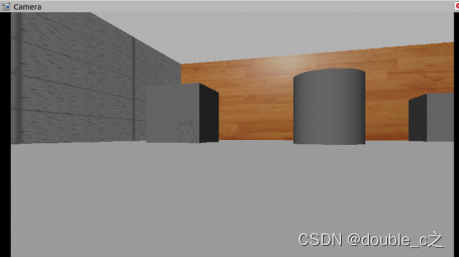
下图是robot.launch展示(红色方块是我们添加的摄像头):
下图是robot_env.launch展示:
如何添加单目摄像头
参考b站学习视频的添加摄像头部分内容: https://www.bilibili.com/video/BV1Ci4y1L7ZZ?p=263&vd_source=9e3999ac88af2c6889c5f00cccc8d215
对应课程文档链接:http://www.autolabor.com.cn/book/ROSTutorials/
实现为我们自己的机器人添加摄像头功能:
实现流程:
摄像头仿真基本流程:
已经创建完毕的机器人模型,编写一个单独的 xacro 文件,为机器人模型添加摄像头配置;
将此文件集成进xacro文件;
启动 Gazebo,使用 Rviz 显示摄像头信息。
- 摄像头 xacro 文件
camera.xacro,代码内容如下:
camera link、将相机作为一个link添加到机器人上的部件link2,于是便有个camera2link2的关节,type为固定的fixed
<!-- 摄像头相关的 xacro 文件 -->
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 摄像头属性 --><xacro:property name="camera_length" value="0.001" /> <!-- 摄像头长度(x) --><xacro:property name="camera_width" value="0.00025" /> <!-- 摄像头宽度(y) --><xacro:property name="camera_height" value="0.00025" /> <!-- 摄像头高度(z) --><xacro:property name="camera_x" value="0" /> <!-- 摄像头安装的x坐标 --><xacro:property name="camera_y" value="0" /> <!-- 摄像头安装的y坐标 --><xacro:property name="camera_z" value="0.02" /> <!-- 摄像头安装的z坐标:底盘高度 / 2 + 摄像头高度 / 2 --><!-- Create laser reference frame --><link name="camera"><visual><origin xyz="0.000198755346578818 -0.000268944626068074 -0.0105330004865362" rpy="0 0 0" /><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><material name="red"/></visual><collision><origin xyz="0.000198755346578818 -0.000268944626068074 -0.0105330004865362" rpy="0 0 0" /><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry></collision></link><!-- 关节 --><joint name="camera2link2" type="fixed"><parent link="link2"/><child link="camera" /><!-- 需要计算两个 link 的物理中心之间的偏移量 --><!-- 设置joint相对于父节的偏移量 --><origin xyz="-0.00028 -0.0003 0.0102" rpy="0 0 0" /><!-- 设置关节旋转参考的坐标轴,0表示不绕该轴旋转,1表示绕该轴旋转 --><axis xyz="0 0 1" /></joint>
</robot>
- Gazebo 仿真摄像头
通过 Gazebo 模拟摄像头传感器,并在 Rviz 中显示摄像头数据
新建 xacro 文件命名为cameraz_gazebo.xacro,配置摄像头传感器信息:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="my_sensors"><gazebo reference="camera"><material>Gazebo/Red</material></gazebo><gazebo reference="camera"><sensor type="camera" name="camera_node"><update_rate>30.0</update_rate><camera name="head"><horizontal_fov>1.3962634</horizontal_fov><image><width>1280</width><height>720</height><format>R8G8B8</format></image><clip><near>0.02</near><far>300</far></clip><noise><type>gaussian</type><mean>0.0</mean><stddev>0.007</stddev></noise></camera><plugin name="gazebo_camera" filename="libgazebo_ros_camera.so"><alwaysOn>true</alwaysOn><updateRate>0.0</updateRate><cameraName>/camera</cameraName><imageTopicName>image_raw</imageTopicName><cameraInfoTopicName>camera_info</cameraInfoTopicName><frameName>camera</frameName><hackBaseline>0.07</hackBaseline><distortionK1>0.0</distortionK1><distortionK2>0.0</distortionK2><distortionK3>0.0</distortionK3><distortionT1>0.0</distortionT1><distortionT2>0.0</distortionT2></plugin></sensor></gazebo>
</robot>
1.2摄像头 xacro 文件
camera.xacro,代码内容如下:
camera link、将相机作为一个link添加到机器人上link2,于是便有个camera2link2的关节,type为固定的fixed
<!-- 摄像头相关的 xacro 文件 -->
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 摄像头属性 --><xacro:property name="camera_length" value="0.001" /> <!-- 摄像头长度(x) --><xacro:property name="camera_width" value="0.00025" /> <!-- 摄像头宽度(y) --><xacro:property name="camera_height" value="0.00025" /> <!-- 摄像头高度(z) --><xacro:property name="camera_x" value="0" /> <!-- 摄像头安装的x坐标 --><xacro:property name="camera_y" value="0" /> <!-- 摄像头安装的y坐标 --><xacro:property name="camera_z" value="0.02" /> <!-- 摄像头安装的z坐标:底盘高度 / 2 + 摄像头高度 / 2 --><!-- Create laser reference frame --><link name="camera"><visual><origin xyz="0.000198755346578818 -0.000268944626068074 -0.0105330004865362" rpy="0 0 0" /><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><material name="red"/></visual><collision><origin xyz="0.000198755346578818 -0.000268944626068074 -0.0105330004865362" rpy="0 0 0" /><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry></collision></link><!-- 关节 --><joint name="camera2link2" type="fixed"><parent link="link2"/><child link="camera" /><!-- 需要计算两个 link 的物理中心之间的偏移量 --><!-- 设置joint相对于父节的偏移量 --><origin xyz="-0.00028 -0.0003 0.0102" rpy="0 0 0" /><!-- 设置关节旋转参考的坐标轴,0表示不绕该轴旋转,1表示绕该轴旋转 --><axis xyz="0 0 1" /></joint>
</robot>
封装惯性矩阵算法的 xacro 文件,内容如下的my_head.xacro文件书写,这个文件复制于链接http://www.autolabor.com.cn/book/ROSTutorials/di-6-zhang-ji-qi-ren-xi-tong-fang-zhen/66-urdfji-cheng-gazebo/662-urdf-ji-cheng-gazebo-xiang-guan-she-zhi.html的6.6.2 URDF集成Gazebo相关设置这一小节,将标准的球体、圆柱与立方体的惯性矩阵公式封装成xacro实现:
<robot name="base" xmlns:xacro="http://wiki.ros.org/xacro"><!-- Macro for inertia matrix --><xacro:macro name="sphere_inertial_matrix" params="m r"><inertial><mass value="${m}" /><inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"iyy="${2*m*r*r/5}" iyz="0" izz="${2*m*r*r/5}" /></inertial></xacro:macro><xacro:macro name="cylinder_inertial_matrix" params="m r h"><inertial><mass value="${m}" /><inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"iyy="${m*(3*r*r+h*h)/12}" iyz = "0"izz="${m*r*r/2}" /> </inertial></xacro:macro><xacro:macro name="Box_inertial_matrix" params="m l w h"><inertial><mass value="${m}" /><inertia ixx="${m*(h*h + l*l)/12}" ixy = "0" ixz = "0"iyy="${m*(w*w + l*l)/12}" iyz= "0"izz="${m*(w*w + h*h)/12}" /></inertial></xacro:macro>
</robot>
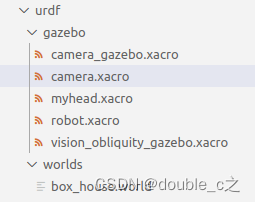
组合执行器与摄像头
<!-- 组合执行器与摄像头 -->
<robot name="my_robot" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:include filename="myhead.xacro" /><xacro:include filename="vision_obliquity_gazebo.xacro" /><xacro:include filename="camera.xacro" /><xacro:include filename="camera_gazebo.xacro" />
</robot>这里的vision_obliquity_gazebo.xacro是我们自己的机器人xacro文件,也就是手术执行器,替换成你们自己的机器人描述文件。
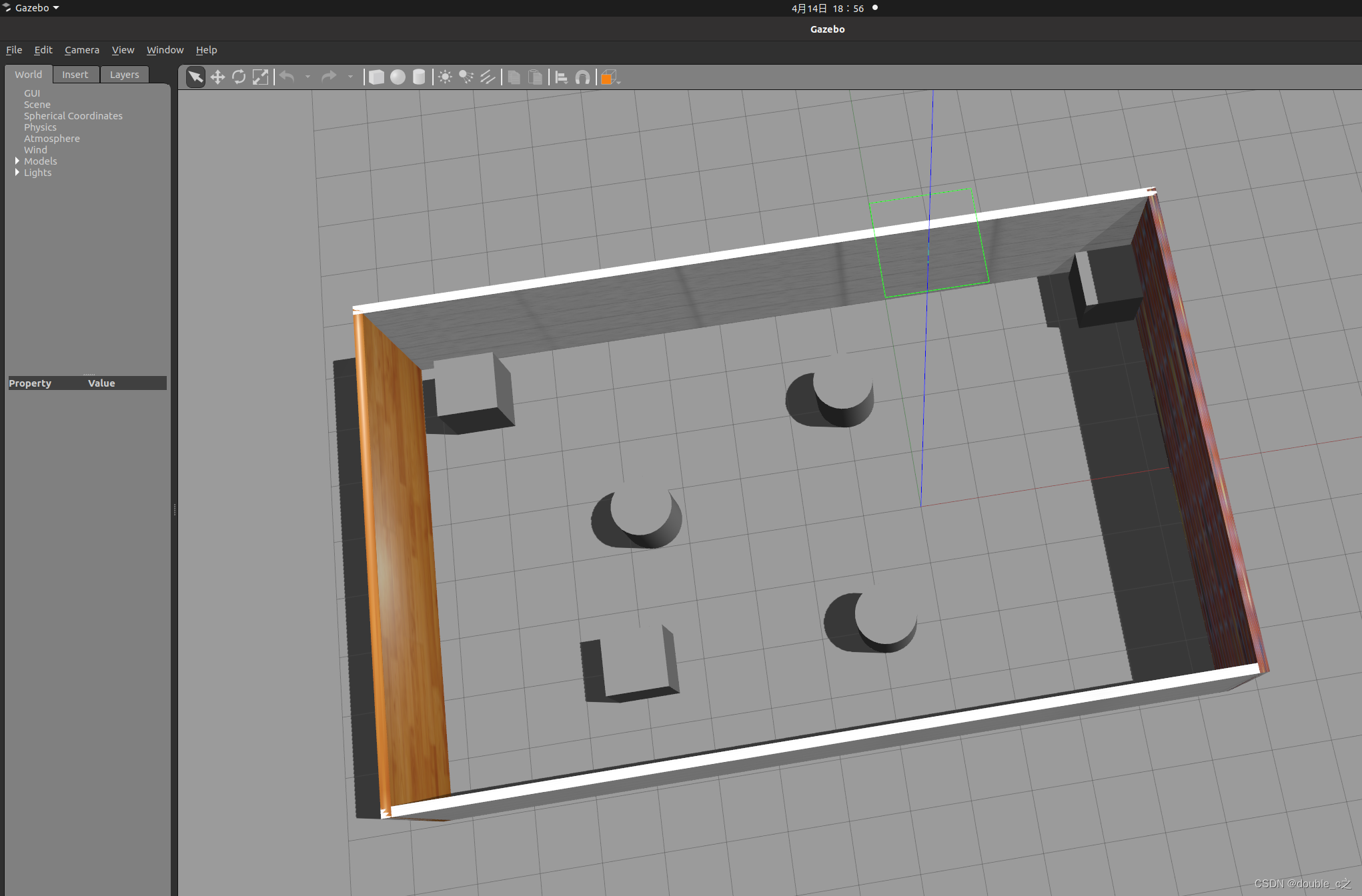
下载现成的机器人环境文件
1.下载官方模型库
https://github.com/osrf/gazebo_models
2.将模型库复制进 gazebo
将得到的box_hours.world文件复制到 /urdf/worlds下
启动仿真环境
- 进入到手术执行器文件夹surgical_new文件夹路径下
执行如下命令,启动gazebo:
catkin_make
source devel/setup.bash
roslaunch vision_obliquity robot_env.launch
- 进入到手术执行器文件夹surgical_new文件夹路径下
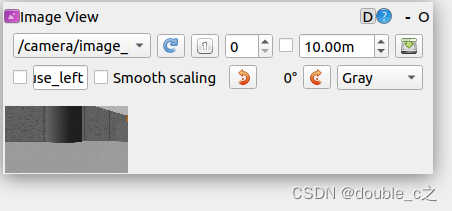
另起一个终端terminal,执行命令,就可以看到摄像头环境信息
rqt_image_view
相关文章:
给自己的机器人部件安装单目摄像头并实现gazebo仿真功能
手术执行器添加摄像头 手术执行器文件夹surgical_new内容展示如何添加单目摄像头下载现成的机器人环境文件启动仿真环境 手术执行器文件夹surgical_new内容展示 进入src文件夹下选择进入vision_obliquity文件夹 选择launch 有两个可用gazebo中rviz展示的launch文件࿰…...
用AI的视角看世界
前言 2024年将是Ai人工智能在各个行业垂直领域发展的元年。 随着2022年11月openai 的大语言模型chatgpt3.5的诞生,已经预示着互联网时代,移动互联网时代即将迎来新的变革,也预示着web3.0和元宇宙更近了一步。 回顾历史,互联网的…...
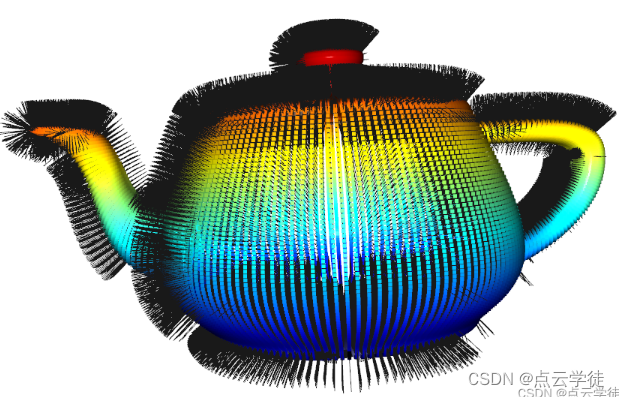
MATLAB 自定义实现点云法向量和曲率计算(详细解读)(64)
MATLAB 自定义实现点云法向量和曲率计算(详细解读)(64) 一、算法介绍二、算法步骤三、算法实现1.代码 (完整,注释清晰,可直接用)2.结果一、算法介绍 首先说明: ------这里代码手动实现,不调用matlab提供的法向量计算接口,更有助于大家了解法向量和曲率的计算方法,…...
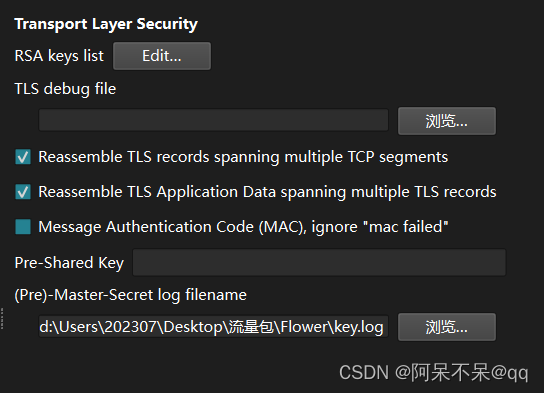
拯救鲨鱼!Helping wireshark!wireshark未响应解决方法
前言 做题的的时候 在用wireshark解密tls秘钥的时候 我的小鲨鱼突然未响应了 然后我多次尝试无果 并且殃及池鱼 我电脑上所有的流量包都打不开了?!!! 于是乎 尝试删了重下 还是未响应 开始怀疑电脑 重启电脑两次 还是打…...

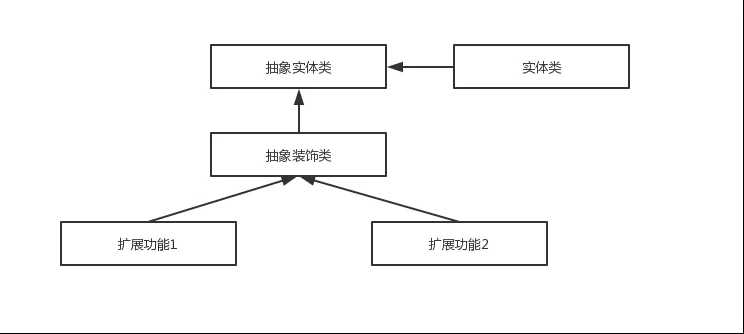
设计模式之责任链讲解
责任链模式适用于需要将请求和处理解耦的场景,同时又需要动态地组织处理逻辑的场景。 通过使用责任链模式,可以实现请求的动态处理、灵活的扩展和简化的代码编写,提高系统的可维护性和可扩展性。 一、责任链入门 以下这是GPT生成的责任链代…...

K8s: 将一个节点移出集群和相关注意事项
前置步骤 在Kubernetes集群中,要移出一个节点,你需要执行以下步骤: 1 )将节点标记为不可调度 首先,你需要将目标节点标记为不可调度,以确保Kubernetes不会在该节点上调度新的Pod这可以通过执行以下命令实…...
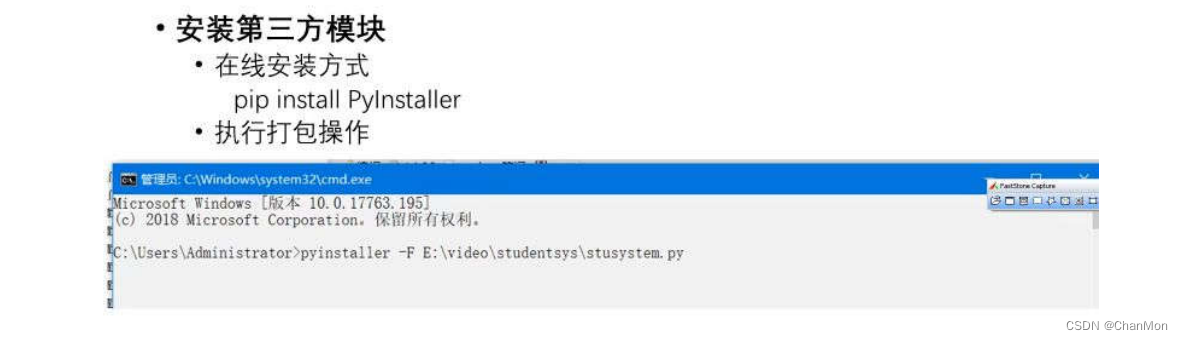
Python学习笔记24 - 学生信息管理系统
1. 需求分析 2. 系统设计 3. 系统开发必备 4. 主函数设计 5. 学生信息维护模块设计 a. 录入学生信息 b. 删除学生信息 c. 修改学生信息 d. 查询学生信息 e. 统计学生总人数 f. 显示所有学生信息 g. 排序模块设计 6. 项目打包...

【物联网应用案例】某制造企业电锅炉检测项目
供暖行业在我国的经济发展中占据着重要的地位,然而,长期以来,该行业存在着自动化水平低、管理效率不高等问题,制约了其持续发展。为了解决这些问题,吉林某电锅炉生产厂家进行了一项创新性的尝试。 该厂家通过集成物联…...
设计模式实践
结合设计模式概念和在java/spring/spring boot中的实战,说明下列设计模式。 一、工厂模式 这里只讲简单工厂模式,详细的可以参考Java工厂模式(随笔)-CSDN博客。工厂类会根据不同的参数或条件来决定创建哪种对象,这样…...
嵌入式学习52-ARM1
知识零散: 1.flash: nor flash 可被寻地址 …...

Java(MySQL基础)
数据库相关概念 MySOL数据库 关系型数据库(RDBMS) 概念: 建立在关系模型基础上,由多张相互连接的二维表组成的数据库。特点: 使用表存储数据,格式统一,便于维护使用SQL语言操作,标准统一,使用方便 SQL SOL通用语法…...

预约系统的使用
预约系统的使用 目录概述需求: 设计思路实现思路分析1.用户年规则 在 预约系统中的使用流程 参考资料和推荐阅读 Survive by day and develop by night. talk for import biz , show your perfect code,full busy,skip hardness,make a better result,wa…...

酷开科技OTT大屏营销:开启新时代的营销革命
随着互联网技术的不断发展和普及,大屏已经成为越来越多家庭选择的娱乐方式。在这个背景下,酷开科技凭借其强大的技术实力和敏锐的市场洞察力,成功地将大屏转化为一种新的营销渠道,为品牌和企业带来了前所未有的商业机会。 酷开科技…...

网络安全(防火墙,IDS,IPS概述)
问题一:什么是防火墙,IDS,IPS? 防火墙是对IP:port的访问进行限制,对访问端口进行制定的策略去允许开放的访问,将不放开的端口进行拒绝访问,从而达到充当防DDOS的设备。主要是拒绝网络流量,阻断所有不希望出现的流程,禁止数据流量流通,达到安全防护的作用。如将一些恶…...

安装IntelliJ IDEA插件教程
安装IntelliJ IDEA插件:一份详细指南 在提升IntelliJ IDEA开发效率的过程中,插件扮演着不可或缺的角色。它们为IDE提供了额外的功能和工具,以满足开发者在特定编程语言、框架、测试、版本控制等方面的个性化需求。本文将为您详细阐述如何在I…...
)
大厂基础面试题(之四)
Q1:请先进行自我介绍 Q2:说下你学习前端的详细过程 Q3:一个页面从url输入到显示页面的整个过程 1.URL解析 2.DNS解析 3.建立TCP连接 4.发起HTTP请求 5.服务器处理请求 6.返回HTTP响应 7.下载页面资源 8.解析和渲染页面 9.JavaScript执行 10…...

为什么我们应该切换到Rust
What is RUST? 什么是Rust? Rust is a programming language focused on safety, particularly safe concurrency, supporting functional and imperative-procedural paradigms. Rust is syntactically similar to C, but it provides memory safety without usi…...
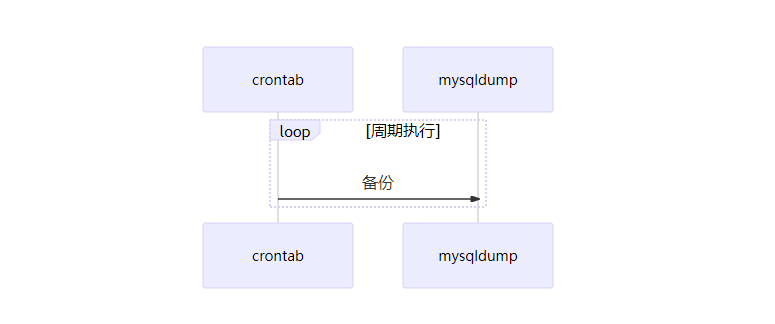
基于Linux定时任务实现的MySQL周期性备份
1、创建备份目录 sudo mkdir -p /var/backups/mysql/database_name2、创建备份脚本 sudo touch /var/backups/mysql/mysqldump.sh# 用VIM编辑脚本文件,写入备份命令 sudo vim /var/backups/mysql/mysqldump.sh# 内如如下 #!/bin/bash mysqldump -uroot --single-…...

【Altium Designer 20 笔记】隐藏PCB上的信号线(连接线)
使用网络类隐藏特定类型的信号线 如果你想要隐藏特定类型的信号线(例如电源类),你可以首先创建一个网络类。使用快捷键DC调出对象类浏览器,在Net Classes中右击添加类,并重命名(例如为“Power”࿰…...

【Git教程】(九)版本标签 —— 创建、查看标签,标签的散列值,将标签添加到日志输出中,判断标签是否包含特定的提交 ~
Git教程 版本标签(tag) 1️⃣ 创建标签2️⃣ 查看存在的标签3️⃣ 标签的散列值4️⃣ 将标签添加到日志输出中5️⃣ 判断tag是否包含特定的提交🌾 总结 大多数项目都是用 1.7.3.2和 “ gingerbread” 这样的数字或名称来标识软件版本的。在 …...

终极NDS游戏资源编辑器Tinke:免费开源工具轻松提取和修改任天堂DS游戏文件
终极NDS游戏资源编辑器Tinke:免费开源工具轻松提取和修改任天堂DS游戏文件 【免费下载链接】tinke Viewer and editor for files of NDS games 项目地址: https://gitcode.com/gh_mirrors/ti/tinke 你是否曾经好奇任天堂DS游戏内部包含了哪些精美的图像、动听…...

基于T4技术栈的现代全栈应用开发实践与最佳实践解析
1. 项目概述:一个现代全栈应用的原型与起点最近在GitHub上看到一个挺有意思的项目,叫timothymiller/t4-app。乍一看这个名字,可能有点摸不着头脑,但点进去你会发现,这其实是一个精心设计的全栈Web应用模板。它不是某个…...

2016年FPGA市场格局:巨头并购、技术演进与工程师实战指南
1. 2016年FPGA市场格局:一场没有悬念的卫冕战聊起2016年的FPGA市场,就像看一场结局早已注定的体育比赛。赛灵思(Xilinx)毫无悬念地再次登顶年度营收榜首,这已经是它连续十几年稳坐头把交椅了。根本不需要什么复杂的财务…...

数据库完整性约束与安全机制全解析
一、数据库完整性约束1、数据库完整性基本概念与核心机制(1)完整性定义与作用数据库完整性(Database Integrity)是指在任何情况下保证数据的正确性(Validity)和一致性(Consistency)&…...

GPU资源利用率深度解析与优化实践
1. GPU资源利用率的核心概念与测量方法在HPC(高性能计算)领域,GPU资源利用率是评估计算效率的黄金指标。不同于简单的"使用率"概念,真正的GPU利用率是一个多维度的综合指标,涉及计算核心、内存控制器、缓存体…...

Avalonia AI助手插件:为.NET跨平台UI开发注入专家级智能
1. 项目概述:一个为Avalonia开发者量身定制的AI助手插件如果你正在使用Avalonia这个跨平台的.NET UI框架,并且同时也在探索如何利用像Claude、ChatGPT、GitHub Copilot这样的AI助手来提升开发效率,那么你很可能遇到过这样的困境:当…...

移动SoC设计演进:从骁龙600/400系列看芯片战略与体验竞争
1. 从一场发布会看移动芯片的十年演进2015年2月,巴塞罗那世界移动通信大会前夕,高通的一则新闻稿在业内激起了不小的涟漪。他们宣布了全新的骁龙600和400系列移动平台,其中最引人注目的,是首次将当时ARM最新的64位Cortex-A72核心引…...

v7上线首周,93%老用户没发现的隐藏指令——高阶提示工程实战手册,含12个未公开参数调用语法
更多请点击: https://intelliparadigm.com 第一章:Midjourney v7核心架构升级与隐性能力图谱 多模态融合推理引擎重构 Midjourney v7 引入了基于分层注意力对齐(Hierarchical Attention Alignment, HAA)的新型生成主干ÿ…...

中国半导体产业崛起:资本驱动下的存储器攻坚与全产业链布局
1. 行业格局的十字路口:当西方整合遇上东方崛起最近几年,半导体行业的头条新闻几乎被一系列重磅并购案所占据:恩智浦收购飞思卡尔、安华高并购博通、英特尔鲸吞阿尔特拉。这些动辄数百亿美元的巨无霸交易,背后传递出一个清晰的信号…...

如何解锁数字化制造的数据瓶颈:stltostp的轻量级STL转STEP解决方案
如何解锁数字化制造的数据瓶颈:stltostp的轻量级STL转STEP解决方案 【免费下载链接】stltostp Convert stl files to STEP brep files 项目地址: https://gitcode.com/gh_mirrors/st/stltostp 在数字化制造与工业4.0转型的浪潮中,数据格式的互操作…...