ARM的学习
点亮流水灯
.text
.global _start
_start: @使能GPIOE的外设时钟 RCC_MP_AHB4ENSETR 0x50000a28 [4]->1LDR R0,=0X50000A28 @指定基地址LDR R1,[R0] @将寄存器数据读取出来保存到R1中ORR R1,R1,#(0x3<<4) @[4]设置为1ORR R1,R1,#(0x3<<5) @[5]设置为1STR R1,[R0] @将修改之后的值写回去@设置PE10为输出 GPIOE_MODER [21:20]->01 0X50006000LDR R0,=0X50006000 @指定基地址LDR R1,[R0] @将寄存器数据读取出来保存到R1中BIC R1,R1,#(0x3<<20) @[21:20]设置为00ORR R1,R1,#(0x1<<20) @[21:20]设置为01BIC R1,R1,#(0x3<<16) @[17:16]设置为00ORR R1,R1,#(0x1<<16) @[17:16]设置为01STR R1,[R0] @将修改之后的值写回去@设置PE10为推挽输出 GPIOE_OTYPER[10]->0 0X50006004LDR R0,=0X50006004 @指定基地址LDR R1,[R0] @将寄存器数据读取出来保存到R1中BIC R1,R1,#(0x1<<10) @[10]设置为0BIC R1,R1,#(0x1<<8) @[8]设置为0STR R1,[R0] @将修改之后的值写回去@设置PE10低速输出 GPIOE_OSPEEDR[21:20]->00 0X50006008LDR R0,=0X50006008 @指定基地址LDR R1,[R0] @将寄存器数据读取出来保存到R1中BIC R1,R1,#(0x3<<20) @[21:20]设置为0BIC R1,R1,#(0x3<<16) @[17:16]设置为0STR R1,[R0] @将修改之后的值写回去@设置PE10无上拉下拉电阻 GPIOx_PUPDRLDR R0,=0X5000600C @指定基地址LDR R1,[R0] @将寄存器数据读取出来保存到R1中BIC R1,R1,#(0x3<<20) @[21:20]设置为0BIC R1,R1,#(0x3<<16) @[17:16]设置为0STR R1,[R0] @将修改之后的值写回去@设置PF10为输出 GPIOF_MODER [21:20]->01 0X50007000LDR R0,=0X50007000 @指定基地址LDR R1,[R0] @将寄存器数据读取出来保存到R1中BIC R1,R1,#(0x3<<20) @[21:20]设置为00ORR R1,R1,#(0x1<<20) @[17:16]设置为01STR R1,[R0] @将修改之后的值写回去@设置PF10为推挽输出 GPIOF_OTYPER[10]->0 0X5000F004LDR R0,=0X50007004 @指定基地址LDR R1,[R0] @将寄存器数据读取出来保存到R1中BIC R1,R1,#(0x1<<10) @[10]设置为0STR R1,[R0] @将修改之后的值写回去@设置PF10低速输出 GPIOF_OSPEEDR[21:20]->00 0X5000F008LDR R0,=0X50007008 @指定基地址LDR R1,[R0] @将寄存器数据读取出来保存到R1中BIC R1,R1,#(0x3<<20) @[21:20]设置为0STR R1,[R0] @将修改之后的值写回去@设置PF10无上拉下拉电阻 GPIOx_PUPDRLDR R0,=0X5000700C @指定基地址LDR R1,[R0] @将寄存器数据读取出来保存到R1中BIC R1,R1,#(0x3<<20) @[21:20]设置为0STR R1,[R0] @将修改之后的值写回去LOOP: @B不让程序结束bl LED1_ONbl DELAYbl LED1_OFFbl DELAYbl LED2_ONbl DELAYbl LED1_OFFbl DELAYbl LED3_ONbl DELAYbl LED1_OFFbl DELAYB LOOP@亮灯
LED1_ON:@点灯 GPIOE_ODR[10]->1 0向0006014LDR R0,=0X50006014 @指定基地址LDR R1,[R0] @将寄存器数据读取出来保存到R1中 ORR R1,R1,#(0x1<<10) @[10]设置为0STR R1,[R0] @将修改之后的值写回去MOV PC,LR @程序返回LED2_ON:@点灯 GPIOE_ODR[10]->1 0向0006014LDR R0,=0X50006014 @指定基地址LDR R1,[R0] @将寄存器数据读取出来保存到R1中ORR R1,R1,#(0x1<<8) @[8]设置为0STR R1,[R0] @将修改之后的值写回去MOV PC,LR @程序返回@亮灯
LED3_ON:LDR R2,=0X50007014 @指定基地址LDR R3,[R2] @将寄存器数据读取出来保存到R3中ORR R3,R3,#(0x1<<10) @[10]设置为0STR R3,[R2] @将修改之后的值写回去MOV PC,LR @程序返回@灭灯
LED_OFF:LDR R0,=0X50006014 @指定基地址LDR R1,[R0] @将寄存器数据读取出来保存到R1中LDR R2,=0X50007014 @指定基地址LDR R3,[R2] @将寄存器数据读取出来保存到R3中BIC R3,R3,#(0x1<<10) @[10]设置为0BIC R1,R1,#(0x1<<10) @[10]设置为0BIC R1,R1,#(0x1<<8) @[8]设置为0STR R1,[R0] @将修改之后的值写回去STR R3,[R2] @将修改之后的值写回去MOV PC,LR @程序返回@延时函数
DELAY:LDR R4,=0X10000000
MM:CMP R4,#0SUBNE R4,R4,#1BNE MMMOV PC,LR @程序返回.end效果演示
流水灯
相关文章:

ARM的学习
点亮流水灯 .text .global _start _start: 使能GPIOE的外设时钟 RCC_MP_AHB4ENSETR 0x50000a28 [4]->1LDR R0,0X50000A28 指定基地址LDR R1,[R0] 将寄存器数据读取出来保存到R1中ORR R1,R1,#(0x3<<4) [4]设置为1ORR R1,R1,#(0x3<<5) [5]设置为1STR …...
)
Restful API接口规范(以Django为例)
Restful API接口规范(以Django为例) Restful API的接口架构风格中制定了一些规范,极大的简化了前后端对接的时间,以及增加了开发效率 安全性保证–使用https路径中带 api标识路径中带版本号数据即资源,通常使用名词操作请求方式决定操作资源…...

AI助力,程序员压力倍增?
讲动人的故事,写懂人的代码 你知道程序员现在在AI辅助编程时最头疼的事情是什么吗?就是怎么在改代码的时候保住小命。 大家都听过程序员因为工作太累导致过劳湿的事情。 无论是写新功能、修bug,还是更改系统配置,都得改代码。 现在有了AI的帮助,本应该轻松很多,为什么…...

LoRA微调
论文:LoRA: Low-Rank Adaptation of Large Language Models 实现:microsoft/LoRA: Code for loralib, an implementation of “LoRA: Low-Rank Adaptation of Large Language Models” (github.com) 摘要 自然语言处理的一个重要的开发范式包括&#…...

45.基于SpringBoot + Vue实现的前后端分离-驾校预约学习系统(项目 + 论文)
项目介绍 本站是一个B/S模式系统,采用SpringBoot Vue框架,MYSQL数据库设计开发,充分保证系统的稳定性。系统具有界面清晰、操作简单,功能齐全的特点,使得基于SpringBoot Vue技术的驾校预约学习系统设计与实现管理工作…...
系统思考—时间滞延
“没有足够的时间是所有管理问题的一部分。”——彼得德鲁克 鱼和熊掌可以兼得,但并不能同时获得。在提出系统解决方案时,我们必须认识到并考虑到解决方案的实施通常会有必要的时间滞延。这种延迟有时比我们预想的要长得多,特别是当方案涉及…...

SSM项目转Springboot项目
SSM项目转Springboot项目 由于几年前写的一个ssm项目想转成springboot项目,所以今天倒腾了一下。 最近有人需要毕业设计转换一下,所以我有时间的话可以有偿帮忙转换,需要的私信我或+v:Arousala_ 首先创建一个新的spr…...

VUE3.0对比VUE2.0
vue3.0 与 vue2.0的不同之处有以下几点: 数据响应式原理 3.0基于Proxy的代理实现监测,vue2.0是基于Object.defineProperty实现监测。 vue2.0 通过Object.defineProperty,每个数据属性被定义成可观察的,具有getter和setter方法&…...
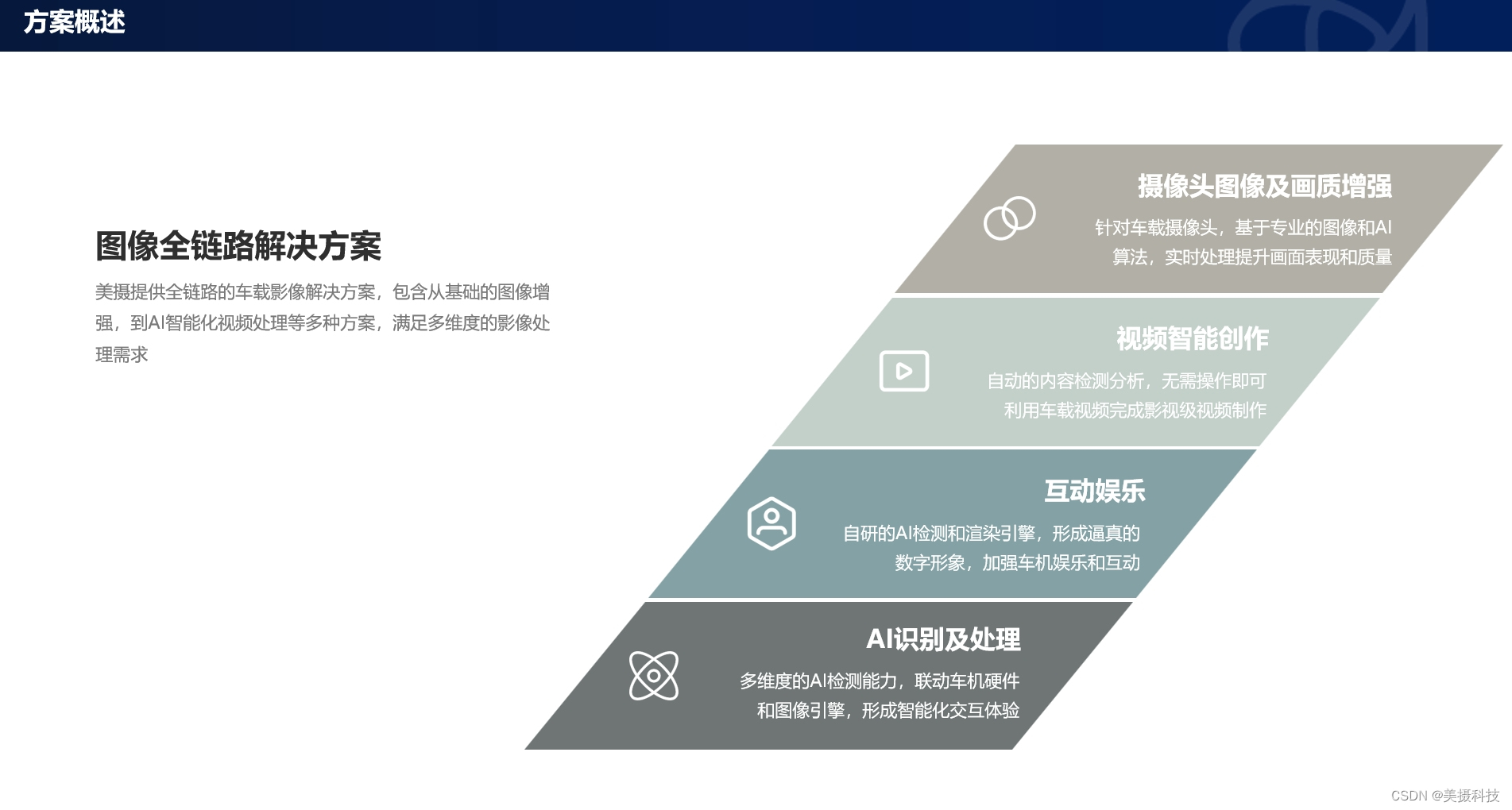
车内AR互动娱乐解决方案,打造沉浸式智能座舱体验
美摄科技凭借其卓越的创新能力,为企业带来了革命性的车内AR互动娱乐解决方案。该方案凭借自研的AI检测和渲染引擎,打造出逼真的数字形象,不仅丰富了车机娱乐内容,更提升了乘客与车辆的互动体验,让每一次出行都成为一场…...
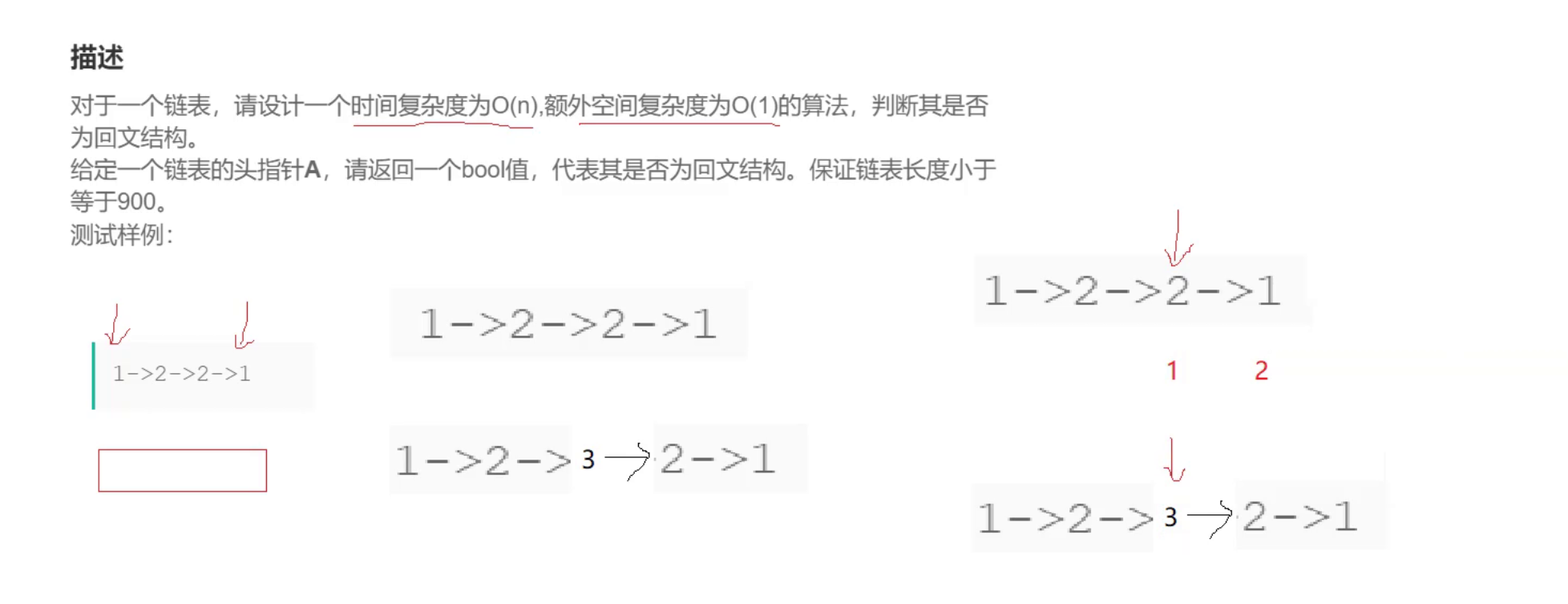
OR36 链表的回文结构
描述 对于一个链表,请设计一个时间复杂度为O(n),额外空间复杂度为O(1)的算法,判断其是否为回文结构。 给定一个链表的头指针A,请返回一个bool值,代表其是否为回文结构。保证链表长度小于等于900。 测试样例: 1->…...

【译】微调与人工引导: 语言模型调整中的 SFT 和 RLHF
原文地址:Fine-Tuning vs. Human Guidance: SFT and RLHF in Language Model Tuning 本文主要对监督微调(SFT, Supervised Fine Tuning )和人类反馈强化学习(RLHF, Reinforcement Learning from Human Feedback)进行简…...
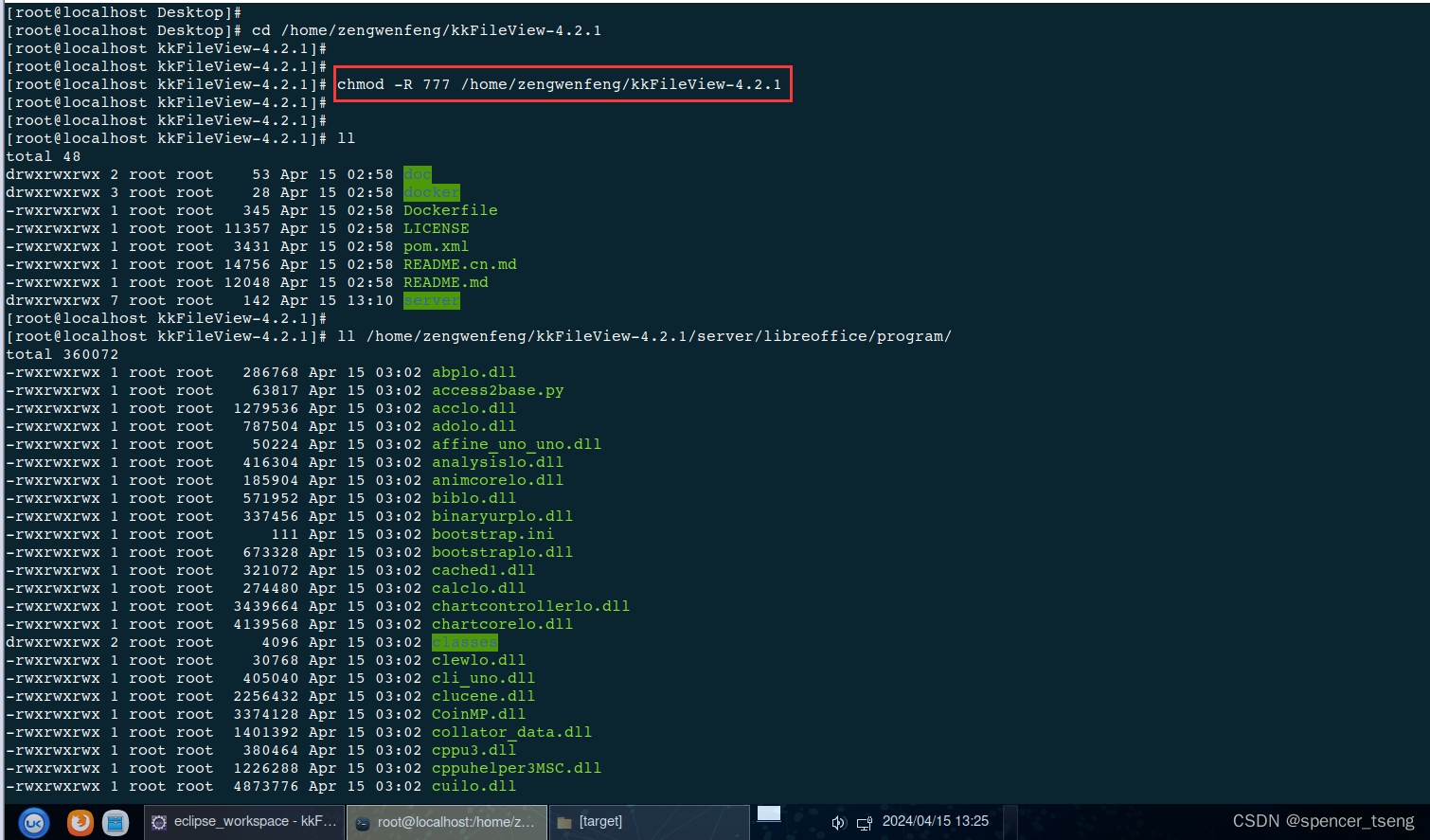
kylin java.io.IOException: error=13, Permission denied
linux centos7.8 error13, Permission denied_linux open error13-CSDN博客 chmod -R 777 /home/zengwenfeng/kkFileView-4.2.1 2024-04-15 13:15:17.416 WARN 3400 --- [er-offprocmng-1] o.j.l.office.LocalOfficeProcessManager : An I/O error prevents us to determine…...

前端面试01总结
1.Js 中!x为true 时,x可能为哪些值 答: 1.false:布尔值false 2.0或-0:数字零 3.""或’或 (空字符串):长度为0的字符串 4.null:表示没有任何值的特殊值 5.undefined:变量未定义时的默认…...

算法--目录
algorithm: 十种排序算法 二分法-各种应用 algorithm: 拓扑排序 算法中的背包问题 最长子序列问题 前缀和-解题集合 差分数组-解题...
ArcGIS Pro 3D建模简明教程
在本文中,我讲述了我最近一直在探索的在 ArcGIS Pro 中设计 3D 模型的过程。 我的目标是尽可能避免与其他软件交互(即使是专门用于 3D 建模的软件),并利用 Pro 可以提供的可能性。 这个短暂的旅程分为三个不同的阶段:…...

24届数字IC设计/验证秋招总结贴——先看这个
文章目录 前言一、经验篇二、知识学习篇三、笔试篇3.1 各大公司笔试真题3.2 华为机试——数字芯片笔试题汇总 四、面试篇4.1 时间节点4.2 提前批4.3 正式批 前言 为方便快速进行查找该专栏的内容,将所有内容链接均放在此篇博客中 整理不易,欢迎订阅~~ …...
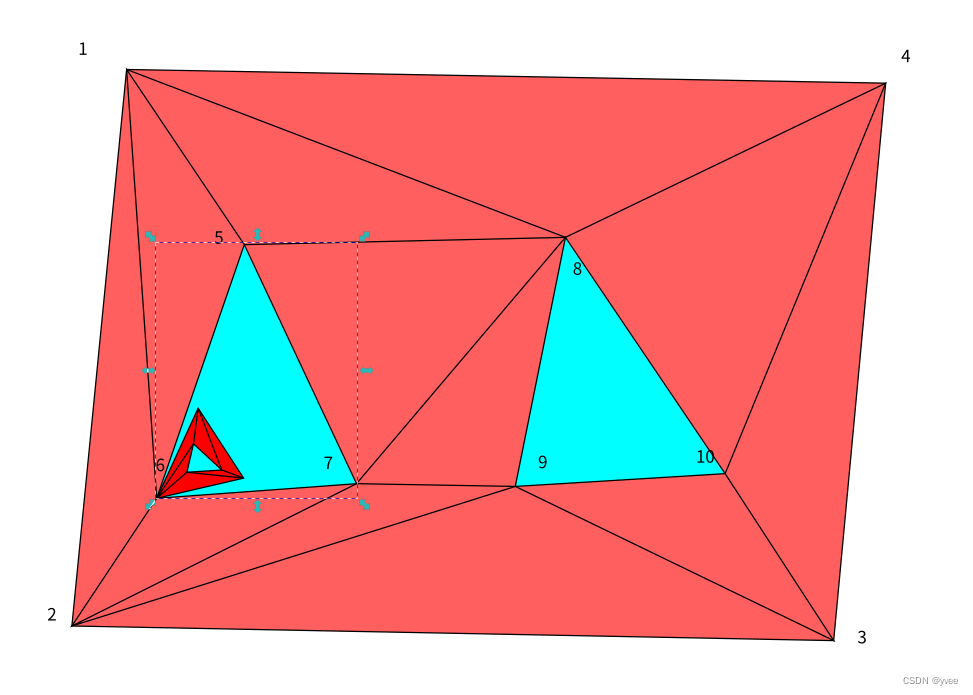
带洞平面三角分割结果的逆向算法
先标不重复点,按最近逐个插入。 只说原理。 不带洞的 1 2 4 2 3 4 两个三角形 结果 1 2 3 4 无重复 无洞 1 2 6 1 2 3 6 1 2 3 7 6 1 2 3 4 7 6 1 2 3 4 5 7 6 1 2 3 4 1 5 7 6 1 2 3 4 1 6 5 7 6 最终结果 1 2 3 4 1 6 5 7 6 按重复分割 1 2 3…...

MGRE-OSPF接口网络类型实验
OSPF接口网络类型实验 一,实验拓扑 初始拓扑: 最终拓扑: 二,实验要求及分析 要求: 1,R6为ISP只能配置IP地址,R1-R5的环回为私有网段 2,R1/R4/R5为全连的MGRE结构,R…...

ChatGPT科研利器详解:写作论文轻松如玩游戏
ChatGPT无限次数:点击直达 ChatGPT科研利器详解:写作论文轻松如玩游戏 引言 在当今科技日新月异的时代,人工智能技术的应用越来越广泛,其中自然语言处理领域的发展尤为迅猛。ChatGPT作为一款先进的文本生成模型,为科研工作者提供…...

vue3从精通到入门23:定义全局变量
在vue2中,我们知道vue2.x是使用Vue.prototype.$xxxxxxx来定义全局变量, 比如定义一个全局的工具函数。 // 定义 ... Vue.prototype.$utilsutils;// 使用 this.$utils() ... 在vue3中我们无法使用this,提供了globalProperties; …...
)
手把手教你用Arduino+ELM327读取OBD-II数据(附代码和常见故障码解析)
用Arduino与ELM327打造智能车载数据监控系统 在创客圈子里,车辆数据监控一直是个既实用又有趣的领域。想象一下,用不到200元的硬件成本,就能实时读取发动机转速、油耗数据甚至诊断车辆潜在故障——这正是Arduino与ELM327组合带来的可能性。不…...

终极免费风扇控制软件:FanControl完整配置与优化指南
终极免费风扇控制软件:FanControl完整配置与优化指南 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/fa/…...

面试题:模型评价指标全解析——准确率、精确率、召回率、F1、ROC、AUC、MAE、MSE、RMSE、R² 一文讲透
把“分类指标怎么看、回归指标怎么选、ROC/AUC 怎么判断模型好坏”一次讲清楚很多人在面试里被问到“模型评价指标有哪些”时,第一反应往往是背一串名词:准确率、精确率、召回率、F1、AUC、MAE、MSE、R。看似都答到了,实际上却很容易被继续追…...

现代化WPF可视化设计引擎:从XAML代码到拖拽式开发的效率革命
现代化WPF可视化设计引擎:从XAML代码到拖拽式开发的效率革命 【免费下载链接】WpfDesigner The WPF Designer from SharpDevelop 项目地址: https://gitcode.com/gh_mirrors/wp/WpfDesigner 在WPF应用程序开发中,手动编写XAML代码进行界面布局是每…...

QML WebEngine与ECharts联袂:打造高性能实时数据可视化桌面应用
1. 为什么选择QMLWebEngineECharts组合? 在开发桌面端实时数据可视化应用时,我们常常面临一个关键选择:是使用原生绘图方案还是Web技术栈?我经过多个工业监控项目的实战验证,发现QMLWebEngineECharts的组合堪称黄金搭…...

JPEXS Flash反编译器技术架构解析:遗留Flash资产现代化迁移方案
JPEXS Flash反编译器技术架构解析:遗留Flash资产现代化迁移方案 【免费下载链接】jpexs-decompiler JPEXS Free Flash Decompiler 项目地址: https://gitcode.com/gh_mirrors/jp/jpexs-decompiler 在数字化转型进程中,大量遗留的Flash应用程序成为…...

从百元平板到AIoT:成本极致化下的电子设计哲学与职业未来
1. 从百元平板之争看电子设计的未来走向那天在门洛帕克的星巴克,Vivek Wadhwa迟到了几分钟,一坐下就带着那种即将沸腾的能量感切入正题:“我最近好像总在惹麻烦!”他指的麻烦,是那些关于创新、关于价格、关于行业未来的…...

基于Web Speech API与ChatGPT构建语音对话Web应用全解析
1. 项目概述与核心价值 最近在折腾一个挺有意思的玩意儿,一个能和ChatGPT进行语音对话的Web应用。这项目叫 chatgpt-voice ,是GitHub上一个开源的前端项目。说白了,它就是一个网页版的语音聊天机器人,你对着麦克风说话…...

Windows HEIC缩略图终极指南:3分钟让iPhone照片在资源管理器完美预览
Windows HEIC缩略图终极指南:3分钟让iPhone照片在资源管理器完美预览 【免费下载链接】windows-heic-thumbnails Enable Windows Explorer to display thumbnails for HEIC/HEIF files 项目地址: https://gitcode.com/gh_mirrors/wi/windows-heic-thumbnails …...

开源材料计算自动化平台OpenClaw:从高通量筛选到机器学习集成
1. 项目概述:一个材料科学领域的开源协作实验室最近在GitHub上看到一个挺有意思的项目,叫openclaw-materials-lab。光看这个名字,就能嗅到一股浓浓的交叉学科味道——“openclaw”听起来像是个工具或框架名,“materials lab”则直…...