偏微分方程算法之混合边界差分
目录
一、研究对象
二、差分格式
2.1 向前欧拉格式
1. 中心差商
1.1.1 理论推导
1.1.2 算例实现
2. x=0处向前差商,x=1处向后差商
1.2.1 理论推导
1.2.2 算例实现
2.2 Crank-Nicolson格式
2.2.1 理论推导
2.2.2 算例实现
一、研究对象
这里我们以混合边界(导数边界)条件下的抛物型方程初边值问题:
其中,且当
同时为0时公式(1)中的边界条件是诺依曼条件。
二、差分格式
这里我们用向前欧拉法显格式和Crank-Nicolson格式进行差分格式建立。
2.1 向前欧拉格式
1. 中心差商
1.1.1 理论推导
网格剖分参照偏微分方程算法之向前欧拉法(Forward Euler)-CSDN博客。在节点处得到节点离散方程:
利用一阶向前差商代替微商,可得:
边界条件采用中心差商
其中中x变量都已经越界,属于虚拟数值,将在下文单独处理。将上面各式带入公式(2)中,将数值解代替精确解并忽略高阶项,可得到离散差分格式:
公式(3)中第1式可以写成:
其中。为处理越界问题,设公式(4)对i=0和i=1都成立,即:
将上式与公式(3)中的第3式以及、
联立,可得:
联合公式(5)、(6)可得:
1.1.2 算例实现
抛物型初边值问题:
已知精确解为,其中
是方程
的根。取
。
代码如下:
#include<cmath>
#include<stdio.h>
#include<stdlib.h>int main(int argc, char* argv[])
{int m, n, i, k;double h, tau, a,lambda,mu,r;double *x, *t,**u;double f(double x, double t);double phi(double x);double alpha(double t);double beta(double t);m=10;n=400;h=1.0/m;tau=1.0/n;a=1.0;lambda=1.0;mu=1.0;r=a*tau/(h*h);printf("r=%.4f.\n", r);x=(double *)malloc(sizeof(double)*(m+1));for(i=0;i<=m;i++)x[i]=i*h;t=(double *)malloc(sizeof(double)*(n+1));for(k=0;k<=n;k++)t[k]=k*tau;u=(double **)malloc(sizeof(double *)*(m+1));for(i=0;i<=m;i++)u[i]=(double *)malloc(sizeof(double)*(n+1));for(i=0;i<=m;i++)u[i][0]=phi(x[i]);for(k=0;k<n;k++){u[0][k+1]=(1.0-2*r-2*r*lambda*h)*u[0][k]+2*r*u[1][k]-2*r*h*alpha(t[k])+tau*f(x[0], t[k]);for(i=1;i<m;i++)u[i][k+1]=r*u[i-1][k]+(1-2*r)*u[i][k]+r*u[i+1][k]+tau*f(x[i],t[k]);u[m][k+1]=2*r*u[m-1][k]+(1.0-2*r-2*r*mu*h)*u[m][k]+2*r*h*beta(t[k])+tau*f(x[m],t[k]);}printf("t/x 0 0.1 0.2 0.3 0.4 0.5\n");for(k=1;k<=8;k++){printf("%.4f ", t[k]);for(i=0;i<=m/2;i++)printf("%.4f ", u[i][k]);printf("\n");}printf("\n");printf("……\n");printf("\n");printf("0.1000 ");for(i=0;i<=m/2;i++)printf("%.4f ", u[i][40]);printf("\n");for(k=1; k<=4; k=2*k){printf("%.4f ", t[k*100]);for(i=0;i<=m/2;i++)printf("%.4f ", u[i][k*100]);printf("\n");}return 0;
}double f(double x, double t)
{return 0;
}
double phi(double x)
{return 1.0;
}
double alpha(double t)
{return 0.0;
}
double beta(double t)
{return 0.0;
}结果如下:
r=0.2500.
t/x 0 0.1 0.2 0.3 0.4 0.5
0.0025 0.9500 1.0000 1.0000 1.0000 1.0000 1.0000
0.0050 0.9275 0.9875 1.0000 1.0000 1.0000 1.0000
0.0075 0.9111 0.9756 0.9969 1.0000 1.0000 1.0000
0.0100 0.8978 0.9648 0.9923 0.9992 1.0000 1.0000
0.0125 0.8864 0.9549 0.9872 0.9977 0.9998 1.0000
0.0150 0.8764 0.9459 0.9818 0.9956 0.9993 0.9999
0.0175 0.8673 0.9375 0.9762 0.9931 0.9985 0.9996
0.0200 0.8590 0.9296 0.9708 0.9902 0.9974 0.9991……0.1000 0.7175 0.7829 0.8345 0.8718 0.8942 0.9017
0.2500 0.5541 0.6048 0.6452 0.6745 0.6923 0.6983
0.5000 0.3612 0.3942 0.4205 0.4396 0.4512 0.4551
1.0000 0.1534 0.1674 0.1786 0.1867 0.1917 0.19332. x=0处向前差商,x=1处向后差商
1.2.1 理论推导
利用一阶向前差商代替微商,可得:
边界条件处理如下:
将上式带入公式(2),将数值解代替精确解并忽略高阶项,可得离散格式:
整理可得:
1.2.2 算例实现
抛物型初边值问题:
已知精确解为,其中
是方程
的根。取
。
代码如下:
#include<cmath>
#include<stdio.h>
#include<stdlib.h>int main(int argc, char* argv[])
{int m, n, i, k;double h, tau, a,lambda,mu,r;double *x, *t,**u;double f(double x, double t);double phi(double x);double alpha(double t);double beta(double t);m=10;n=400;h=1.0/m;tau=1.0/n;a=1.0;lambda=1.0;mu=1.0;r=a*tau/(h*h);printf("r=%.4f.\n", r);x=(double *)malloc(sizeof(double)*(m+1));for(i=0;i<=m;i++)x[i]=i*h;t=(double *)malloc(sizeof(double)*(n+1));for(k=0;k<=n;k++)t[k]=k*tau;u=(double **)malloc(sizeof(double *)*(m+1));for(i=0;i<=m;i++)u[i]=(double *)malloc(sizeof(double)*(n+1));for(i=0;i<=m;i++)u[i][0]=phi(x[i]);for(k=0;k<n;k++){for(i=1;i<m;i++)u[i][k+1]=r*u[i-1][k]+(1-2*r)*u[i][k]+r*u[i+1][k]+tau*f(x[i],t[k]);u[0][k+1]=(u[1][k+1]-h*alpha(t[k]))/(1.0+lambda*h);u[m][k+1]=(u[m-1][k+1]+h*beta(t[k]))/(1.0+mu*h);}printf("t/x 0 0.1 0.2 0.3 0.4 0.5\n");for(k=1;k<=8;k++){printf("%.4f ", t[k]);for(i=0;i<=m/2;i++)printf("%.4f ", u[i][k]);printf("\n");}printf("\n");printf("……\n");printf("\n");printf("0.1000 ");for(i=0;i<=m/2;i++)printf("%.4f ", u[i][40]);printf("\n");for(k=1; k<=4; k=2*k){printf("%.4f ", t[k*100]);for(i=0;i<=m/2;i++)printf("%.4f ", u[i][k*100]);printf("\n");}return 0;
}double f(double x, double t)
{return 0;
}
double phi(double x)
{return 1.0;
}
double alpha(double t)
{return 0.0;
}
double beta(double t)
{return 0.0;
}结果如下:
r=0.2500.
t/x 0 0.1 0.2 0.3 0.4 0.5
0.0025 0.9091 1.0000 1.0000 1.0000 1.0000 1.0000
0.0050 0.8884 0.9773 1.0000 1.0000 1.0000 1.0000
0.0075 0.8734 0.9607 0.9943 1.0000 1.0000 1.0000
0.0100 0.8612 0.9473 0.9873 0.9986 1.0000 1.0000
0.0125 0.8507 0.9358 0.9801 0.9961 0.9996 1.0000
0.0150 0.8415 0.9256 0.9730 0.9930 0.9989 0.9998
0.0175 0.8331 0.9164 0.9662 0.9895 0.9976 0.9993
0.0200 0.8255 0.9080 0.9596 0.9857 0.9960 0.9985……0.1000 0.6901 0.7591 0.8140 0.8537 0.8778 0.8859
0.2500 0.5230 0.5753 0.6170 0.6474 0.6658 0.6720
0.5000 0.3298 0.3627 0.3890 0.4082 0.4198 0.4237
1.0000 0.1311 0.1442 0.1547 0.1623 0.1669 0.16852.2 Crank-Nicolson格式
边界条件采用中心差商。
2.2.1 理论推导
在虚拟节点处得离散方程:
利用差商代替微商:
其中同样越界,将上式代入公式(8),用数值解代替精确解并忽略高阶项,可得离散格式:
公式(9)中第1式可写为
为处理越界问题,设公式(10)对i=0和i=m都成立,即:
将上式与公式(9)中的第3式以及、
联立,可得:
联合上面两式与公式(10)可得:
上式可写出矩阵形式:
上式可用追赶法求解。
2.2.2 算例实现
抛物型初边值问题:
已知精确解为,其中
是方程
的根。取
。
代码如下:
#include<cmath>
#include<stdio.h>
#include<stdlib.h>int main(int argc, char* argv[])
{int m, n, i, k;double h, tau, a, lambda,mu,r;double *x, *t, *a1, *b, *c, *d, *ans, **u, tkmid;double f(double x, double t);double phi(double x);double alpha(double t);double beta(double t);double * chase_algorithm(double *a, double *b, double *c, double *d, int n);m=10;n=400;h=1.0/m;tau=1.0/n;a=1.0;lambda=1.0;mu=1.0;r=a*tau/(h*h);printf("r=%.4f\n", r);x=(double *)malloc(sizeof(double)*(m+1));for(i=0;i<=m;i++)x[i] = i*h;t=(double *)malloc(sizeof(double)*(n+1));for(k=0;k<=n;k++)t[k] = k*tau;u=(double **)malloc(sizeof(double *)*(m+1));for(i=0;i<=m;i++)u[i]=(double *)malloc(sizeof(double)*(n+1));for(i=0;i<=m;i++)u[i][0]=phi(x[i]);a1=(double *)malloc(sizeof(double)*(m+1));b=(double *)malloc(sizeof(double)*(m+1));c=(double *)malloc(sizeof(double)*(m+1));d=(double *)malloc(sizeof(double)*(m+1));ans=(double *)malloc(sizeof(double)*(m+1));for(k=0;k<n;k++){tkmid=(t[k]+t[k+1])/2.0;for(i=1;i<m;i++){d[i]=r*u[i-1][k]/2.0+(1.0-r)*u[i][k]+r*u[i+1][k]/2.0+tau*f(x[i],tkmid);a1[i]=-r/2.0;b[i]=1.0+r;c[i]=a1[i];}b[0]=1.0+r+r*lambda*h;b[m]=1.0+r+r*mu*h;c[0]=-r;a1[m]=-r;d[0]=(1.0-r-r*lambda*h)*u[0][k]+r*u[1][k]-r*h*alpha(t[k])-r*h*alpha(t[k+1])+tau*f(x[0],tkmid);d[m]=r*u[m-1][k]+(1.0-r-r*mu*h)*u[m][k]+r*h*beta(t[k])+r*h*beta(t[k+1])+tau*f(x[m],tkmid);ans=chase_algorithm(a1,b,c,d,m+1);for(i=0;i<=m;i++)u[i][k+1]=ans[i];}free(a1);free(b);free(c);free(d);printf("t/x 0 0.1 0.2 0.3 0.4 0.5\n");for(k=1;k<=8;k++){printf("%.4f ", t[k]);for(i=0;i<=m/2;i++)printf("%.4f ", u[i][k]);printf("\n");}printf("\n");printf("……\n");printf("\n");printf("0.1000 ");for(i=0;i<=m/2;i++)printf("%.4f ", u[i][40]);printf("\n");for(k=1;k<=4;k=2*k){printf("%.4f ", t[k*100]);for(i=0;i<=m/2;i++)printf("%.4f ", u[i][k*100]);printf("\n");}return 0;
}double f(double x, double t)
{return 0;
}
double phi(double x)
{return 1.0;
}
double alpha(double t)
{return 0.0;
}
double beta(double t)
{return 0.0;
}
double * chase_algorithm(double *a, double *b, double *c, double *d, int n)
{int i;double * ans, *g, *w, p;ans=(double *)malloc(sizeof(double)*n);g=(double *)malloc(sizeof(double)*n);w=(double *)malloc(sizeof(double)*n);g[0]=d[0]/b[0];w[0]=c[0]/b[0];for(i=1;i<n;i++){p=b[i]-a[i]*w[i-1];g[i]=(d[i]-a[i]*g[i-1])/p;w[i]=c[i]/p;}ans[n-1]=g[n-1];i=n-2;do{ans[i]=g[i]-w[i]*ans[i+1];i=i-1;}while(i>=0);free(g);free(w);return ans;
}结果如下:
r=0.2500
t/x 0 0.1 0.2 0.3 0.4 0.5
0.0025 0.9600 0.9960 0.9996 1.0000 1.0000 1.0000
0.0050 0.9347 0.9868 0.9980 0.9997 1.0000 1.0000
0.0075 0.9164 0.9765 0.9950 0.9991 0.9999 1.0000
0.0100 0.9021 0.9663 0.9910 0.9980 0.9996 0.9999
0.0125 0.8900 0.9567 0.9864 0.9964 0.9992 0.9997
0.0150 0.8795 0.9478 0.9813 0.9944 0.9985 0.9993
0.0175 0.8701 0.9394 0.9762 0.9920 0.9975 0.9988
0.0200 0.8616 0.9315 0.9709 0.9893 0.9963 0.9981……0.1000 0.7180 0.7834 0.8350 0.8720 0.8943 0.9017
0.2500 0.5547 0.6054 0.6458 0.6751 0.6929 0.6989
0.5000 0.3618 0.3949 0.4213 0.4404 0.4520 0.4559
1.0000 0.1540 0.1681 0.1793 0.1874 0.1924 0.1940相关文章:
偏微分方程算法之混合边界差分
目录 一、研究对象 二、差分格式 2.1 向前欧拉格式 1. 中心差商 1.1.1 理论推导 1.1.2 算例实现 2. x0处向前差商,x1处向后差商 1.2.1 理论推导 1.2.2 算例实现 2.2 Crank-Nicolson格式 2.2.1 理论推导 2.2.2 算例实现 一、研究对象 这里我们以混合边界…...

中国八大古都,分别是哪8个?
中国历史上统一王朝或者在全局范围内看呈鼎立之势的大的政权的首都,称古都,又称都城、国都等,是古代王朝的政治中心,也是经济和文化中心。 1、西安 西安,古称长安,是中国历史上建都时间最长、建都朝代最多…...

财务信息化与财务软件有何区别与联系?
财务产品与财务信息化,两者究竟有何不同,又有何相通之处?或许,你心中也充满了这样的疑惑。那么,让我用一则小故事,为你揭晓其中的秘密。 想象这样一个场景,长尾狐狸,作为饭团公司的…...
ssm052游戏攻略网站的设计与实现+vue
游戏攻略网站设计与实现 摘 要 现代经济快节奏发展以及不断完善升级的信息化技术,让传统数据信息的管理升级为软件存储,归纳,集中处理数据信息的管理方式。本游戏攻略网站就是在这样的大环境下诞生,其可以帮助管理者在短时间内处…...
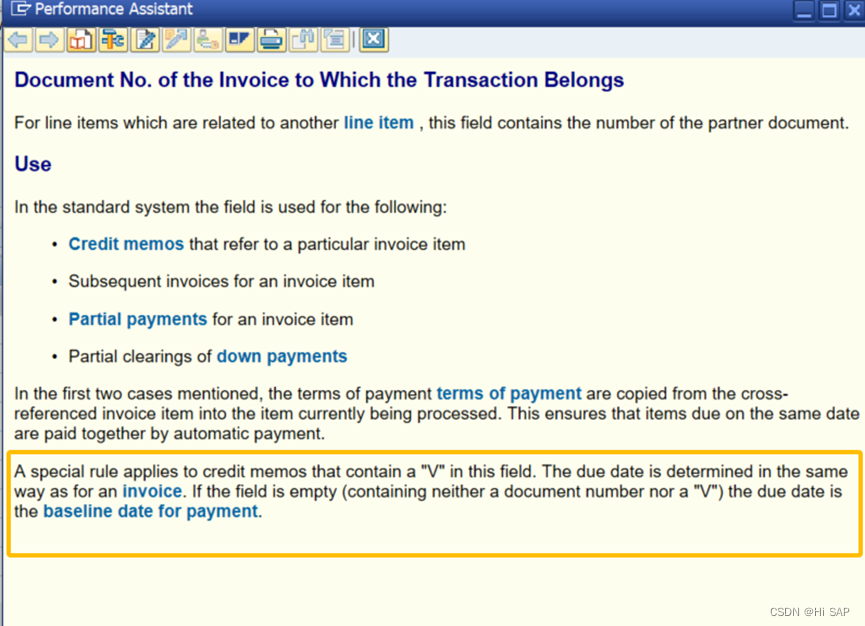
SAP Credit Memo 到期日设置技巧
当我们用FB60, MIRO或者FB70 记账vendor或者customer 的Credit Memo的时候,我们发现Credit Memo的Due Date不受付款条款的影响,默认为跟baseline date是同一天,并且无法手工更改,那么如果要设置到期日怎么操作呢? 首先…...
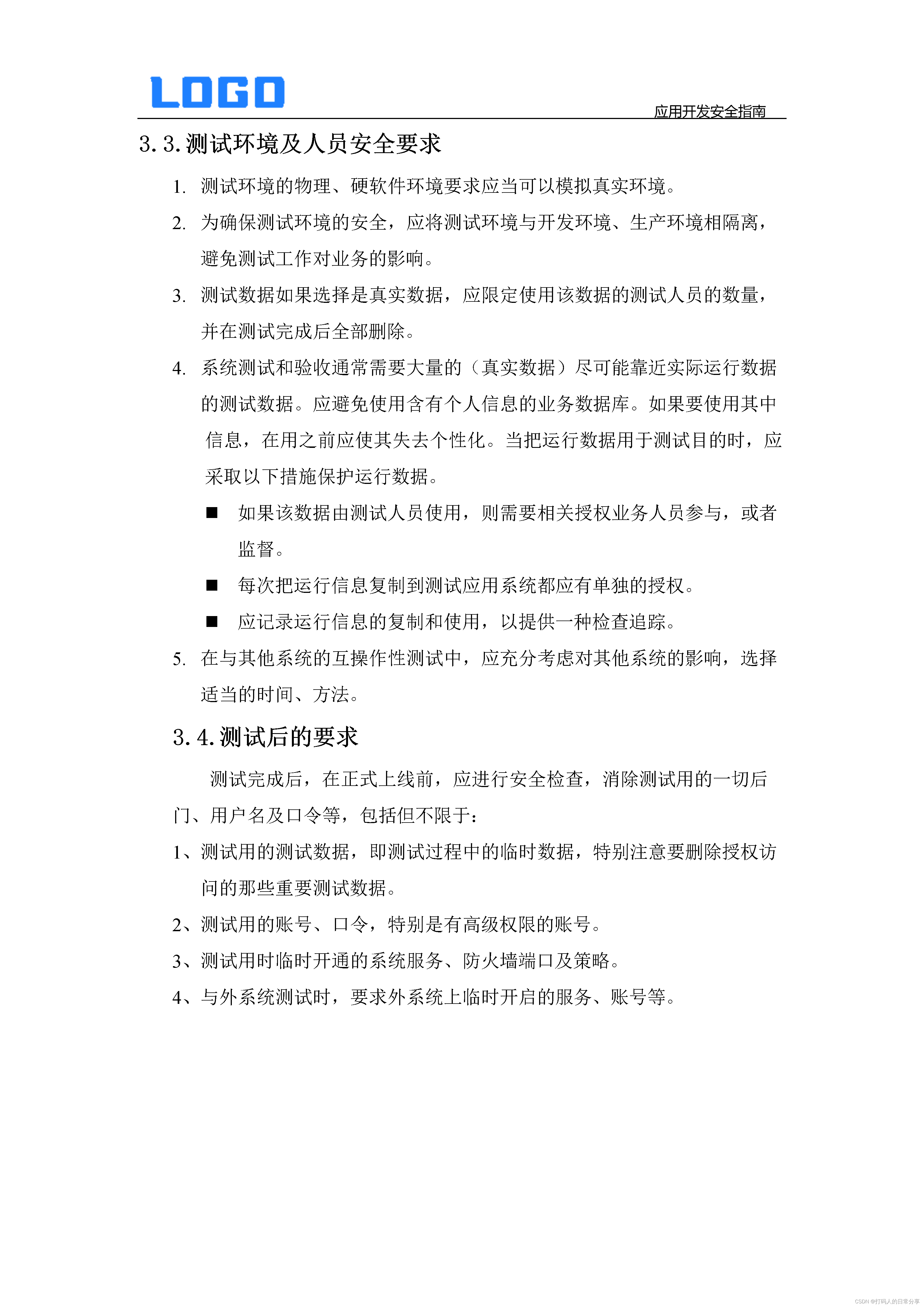
软件开发安全设计方案
2.1.应用系统架构安全设计要求 2.2.应用系统软件功能安全设计要求 2.3.应用系统存储安全设计要求 2.4.应用系统通讯安全设计要求 2.5.应用系统数据库安全设计要求 2.6.应用系统数据安全设计要求 软件开发全资料获取:软件开发全套资料_软件开发资料-CSDN博客https://…...
【Zabbix】zabbix 软件监控
使用zabbix监控系统查看服务器状态以及网站流量指标,利用监控系统的数据去了解上线发布的结果,和网站的健康状态 利用一个优秀的监控软件,我们可以: ●通过一个友好的界面进行浏览整个网站所有的服务器状态 ●可以在 Web 前端方便的查看监控…...

Vue Router 路由动态缓存组件
文章目录 一、简介基本用法生命周期钩子 二、定义是否缓存组件三、缓存组件1. 通过 :include 属性实现vue2.x中vue3.x中 2. 通过 v-slot 功能实现3. 通过 v-if 来实现 四、注意事项 一、简介 Vue Router 允许你缓存路由组件,这样在用户导航回之前的页面时ÿ…...

数据结构:线性表————单链表专题
🌈个人主页:小新_- 🎈个人座右铭:“成功者不是从不失败的人,而是从不放弃的人!”🎈 🎁欢迎各位→点赞👍 收藏⭐️ 留言📝 🏆所属专栏࿱…...
JMM中的内存屏障)
多线程(54)JMM中的内存屏障
Java内存模型(JMM)中的内存屏障是一种保证内存可见性、顺序性的底层机制。它们是一组指令,用于在多线程环境中确保内存操作的有序性和可见性。内存屏障主要分为四类:LoadLoad、StoreStore、LoadStore和StoreLoad。 内存屏障的类型…...

什么是流量清洗?
随着网络企业的迅速发展,越来越多的用户都开始关注关于网络流量的问题,同时,随着网络流量的增多,网络上也出现了大量的垃圾信息和恶意攻击,给网络带来了很大的困扰,而流量清洗则能够解决这个问题。 流量清洗…...
淘宝API(通过商品详情接口采集商品页面数据)请求说明文档|可接入测试key
淘宝商品详情数据接口(taobao.item_get)是天猫开放平台提供的一种API接口,旨在帮助开发者获取天猫平台上的商品详情信息。通过调用这个接口,开发者可以获取包括商品ID、标题、价格、库存量、图片等在内的详细数据,从而…...

示例说明闭包函数
示例说明闭包函数 闭包函数是指在一个函数内部定义另一个函数,并且内部函数可以访问外部函数的局部变量,即使外部函数已经执行完毕。 这种功能使得闭包函数可以捕获外部函数的状态,提供了一种保留局部变量值的方式。闭包函数在编程中常用于…...
【自媒体创作利器】AI白日梦+ChatGPT 三分钟生成爆款短视频
AI白日梦https://brmgo.com/signup?codey5no6idev 引言 随着人工智能(AI)技术的快速发展,AI在各个领域都展现出了强大的应用潜力。其中,自然语言处理技术的进步使得智能对话系统得以实现,而ChatGPT作为其中的代表之一…...

把握零碎时间,开启长期副业兼职之旅!在家也能轻松赚钱!
转眼间,2024年已悄然走过三分之一。这一年,外界环境似乎并不那么友好,但对我而言,我的月收入仍然相对稳定。我找到的副业让我每月能赚到3000元以上,这让我深感庆幸。 现实中,只依赖主业工资的日子确实艰辛…...

HarmonyOS开发实例:【数字管家app】
样例简介 数字管家场景需要手机端、设备端和服务端三方协同完成,本文档介绍的demo是数字管家大场景中的手机端应用;用户注册登录后可创建我的家庭并管理家庭成员;可以添加设备(包括智能台灯,智能窗帘,智能…...

人工智能_大模型033_LangChain003_记忆封装Memory上下文控制机制_LCEL表达式语言---人工智能工作笔记0168
## 三、记忆封装:Memory ### 3.1、对话上下文:ConversationBufferMemory from langchain.memory import ConversationBufferMemory, ConversationBufferWindowMemoryhistory = ConversationBufferMemory() history.save_context({"input": "你好啊"}…...

持安科技与顺丰正式签约!共建零信任应用安全最佳实践
近日,北京持安科技有限公司与顺丰科技有限公司基于零信任“应用数据网关产品”签署了合作协议,持安科技创始人兼CEO何艺、顺丰科技底盘领域负责人刘潭仁出席活动并签署协议。 根据协议,双方将基于持安科技的零信任应用数据网关产品展开合作与…...

Elasticsearch分布式搜索
实用篇-ES-环境搭建 ES是elasticsearch的简称。我在SpringBoot学习 数据层解决方案 的时候,写过一次ES笔记,可以结合一起看一下。 之前在SpringBoot里面写的相关ES笔记是基于Windows的,现在我们是基于docker容器来使用,需要你们提…...
【Unity 实用工具篇】 | UIEffect 实现一系列UGUI特效,灰度、负片、像素化特效
前言 【Unity 实用工具篇】 | UIEffect 实现一系列UGUI特效,灰度、负片、像素化特效一、UGUI特效插件:UIEffect1.1 介绍1.2 效果展示1.3 使用说明及下载 二、组件属性面板三、代码操作组件四、组件常用方法示例4.1 使用灰度特效做头像(关卡)选择 总结 前…...

WinMerge过滤器进阶:从基础规则到实战场景配置
1. WinMerge过滤器入门:从零开始理解规则配置 WinMerge作为一款老牌开源文件对比工具,其过滤器功能常常被低估。很多开发者只是用它来排除版本控制目录,但实际上它能做的远不止这些。我第一次接触WinMerge过滤器是在处理一个Java项目时&#…...

对比不同模型在Taotoken平台上的响应速度与输出质量体感
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比不同模型在Taotoken平台上的响应速度与输出质量体感 在开发与创作过程中,我们常常面临一个选择:是追求…...

终极矢量图标库完全指南:Remix Icon 3200+免费图标深度解析
终极矢量图标库完全指南:Remix Icon 3200免费图标深度解析 【免费下载链接】RemixIcon Open source neutral style icon system 项目地址: https://gitcode.com/gh_mirrors/re/RemixIcon Remix Icon 是一套开源的矢量图标库,包含超过3200个精心设…...

3步解锁网易云音乐NCM加密文件:ncmdumpGUI图形化工具完全指南
3步解锁网易云音乐NCM加密文件:ncmdumpGUI图形化工具完全指南 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否在网易云音乐下载了喜欢的歌曲…...

从零到一:在Windows Server上快速部署OpenLDAP服务与客户端连接实战
1. 为什么选择OpenLDAP? 如果你正在管理一个中小型企业的IT基础设施,用户账号管理可能会让你头疼。每次有新员工入职,都要在每台电脑上创建账号;员工离职时又要逐个删除权限。这种重复劳动不仅效率低下,还容易出错。Op…...

5分钟免费解锁Cursor Pro:终极AI编程助手无限使用方案
5分钟免费解锁Cursor Pro:终极AI编程助手无限使用方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your tri…...

搞懂VMware三种网络模式:从NAT断网到桥接、仅主机的实战选择指南
VMware虚拟网络模式深度解析:从原理到场景化实战 当你在深夜赶项目时,虚拟机突然无法联网——这种经历对于开发者而言无异于噩梦。我曾亲眼见过团队新人在演示前夜因NAT模式配置问题崩溃,也见证过安全工程师因选错网络模式导致测试环境暴露。…...

年薪50W+!AI产品经理爆火,0经验也能入行?3类人才需求+4大陪跑方案助你拿下高薪offer!
今年,无论是一些头部厂商,中小厂商,从海外到国内,大中小公司都在积极拥抱讨论AI和拥抱AI。AI 相关的人才缺口已达 500 万,其中AI产品经理需求旺盛,薪资中位数再创新高,36k/月。如果是在头部公司…...

电子测试安全:示波器浮地测量与隔离变压器应用全解析
1. 项目概述:一次关于测试测量安全的深度探讨又到了周五,对于很多工程师来说,这可能是最想摸鱼但又不得不处理手头棘手问题的一天。想象一下这个场景:你面前摆着一台直接从市电取电的设备,它的某个测试点对地可能有高达…...

构建AI信任层TrustLayer:开源插件化架构保障AI输出安全与可靠
1. 项目概述:为什么我们需要一个AI信任层?最近几个月,我几乎把所有主流的AI工具都试了个遍。从代码助手到文案生成,从图像创作到数据分析,每个工具都承诺能提升效率。但用着用着,我发现一个越来越明显的问题…...